

-
摘要: 得益于近期具有世界知识的大规模预训练模型的迅速发展, 基于大模型的具身智能在各类任务中取得了良好的效果, 展现出强大的泛化能力与在各领域内广阔的应用前景. 鉴于此, 对基于大模型的具身智能的工作进行了综述, 首先, 介绍大模型在具身智能系统中起到的感知与理解作用; 其次, 对大模型在具身智能中参与的需求级、任务级、规划级和动作级的控制进行了较为全面的总结; 然后, 对不同具身智能系统架构进行介绍, 并总结了目前具身智能模型的数据来源, 包括模拟器、模仿学习以及视频学习; 最后, 对基于大语言模型(Large language model, LLM)的具身智能系统面临的挑战与发展方向进行讨论与总结.Abstract: Thanks to the rapid development of large-scale pre-training models possessing world knowledge in recent years, embodied intelligence based on large models has achieved good results in various tasks, demonstrating strong generalization capabilities and broad application prospects across various fields. This article reviews the work of embodied intelligence based on large models. First, it introduces the roles of large models in perception and understanding within embodied intelligence systems. Second, it provides a relatively comprehensive summary of the four levels of control that large models participate in within embodied intelligence: Demand-level, task-level, planning-level, and action-level. Subsequently, it introduces different embodied intelligence system architectures and summarizes the current data sources for embodied intelligence models, including simulators, imitation learning, and video learning. Finally, it discusses and summarizes the challenges and development directions faced by embodied intelligence systems based on large language models (LLMs).
-
Key words:
- Large language model (LLM) /
- large visual model /
- foundation model /
- embodied intelligence /
- robot
-
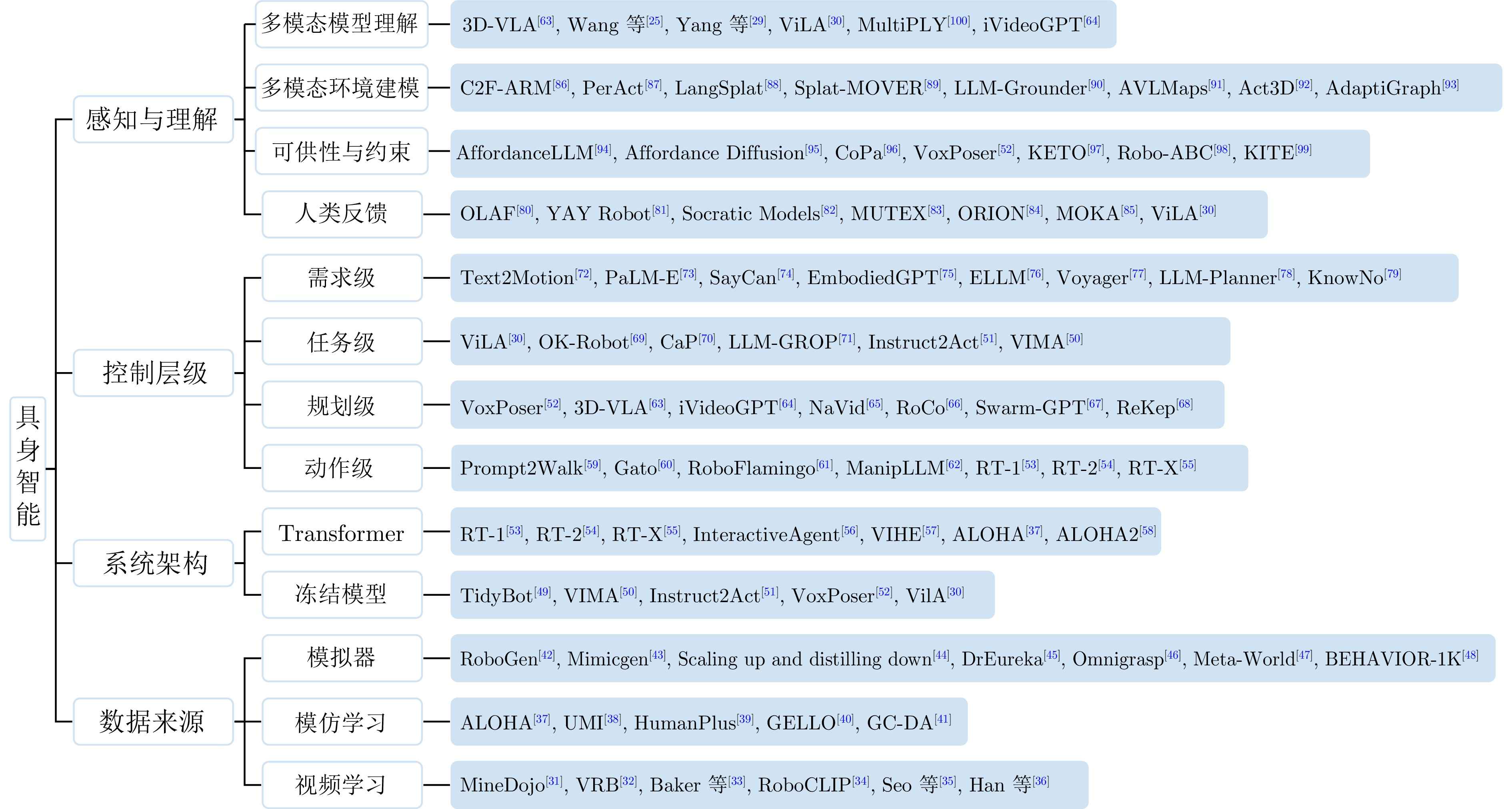
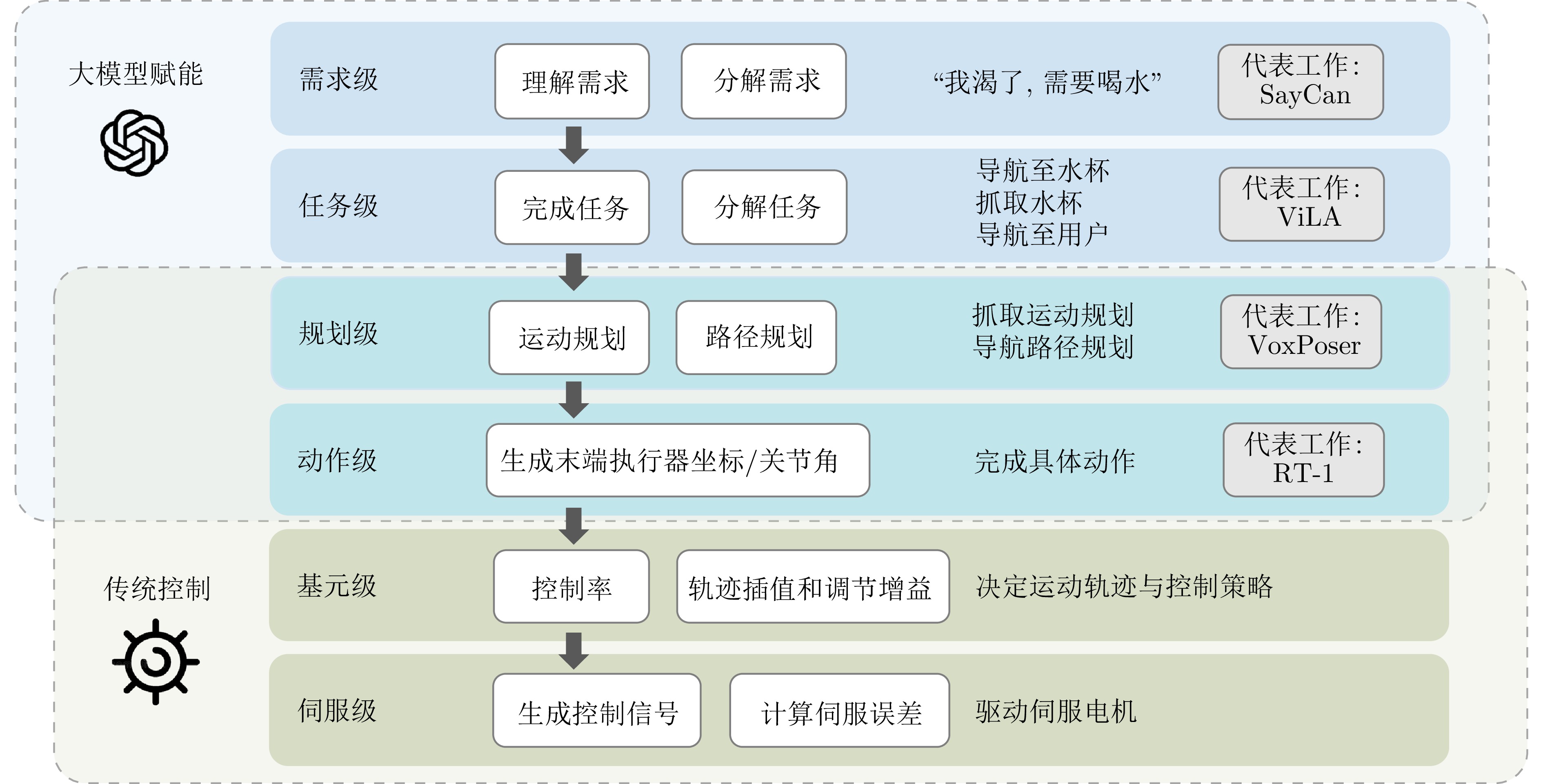
图 1 基于大模型的具身智能工作概览
Fig. 1 Overview of embodied intelligence work based on large models
-
[1] Turing A M. Computing machinery and intelligence. Mind, 1950, 59: 433−460 [2] Roy N, Posner I, Barfoot T, Beaudoin P, Bengio Y, Bohg J, et al. From machine learning to robotics: Challenges and opportunities for embodied intelligence. arXiv preprint arXiv: 2110.15245, 2021.Roy N, Posner I, Barfoot T, Beaudoin P, Bengio Y, Bohg J, et al. From machine learning to robotics: Challenges and opportunities for embodied intelligence. arXiv preprint arXiv: 2110.15245, 2021. [3] Brooks R A. Intelligence without representation. Artificial Intelligence, 1991, 47(1−3): 139−159 doi: 10.1016/0004-3702(91)90053-M [4] Brown T B, Mann B, Ryder N, Subbiah M, Kaplan J, Dhariwal P, et al. Language models are few-shot learners. In: Proceedings of the 34th International Conference on Neural Information Processing Systems. Vancouver, Canada: Curran Associates Inc., 2020. [5] Achiam J, Adler S, Agarwal S, Ahmad L, Akkaya I, Aleman F L, et al. GPT-4 technical report. arXiv preprint arXiv: 2303.08774, 2024.Achiam J, Adler S, Agarwal S, Ahmad L, Akkaya I, Aleman F L, et al. GPT-4 technical report. arXiv preprint arXiv: 2303.08774, 2024. [6] Touvron H, Lavril T, Izacard G, Martinet X, Lachaux M A, Lacroix T, et al. LLaMA: Open and efficient foundation language models. arXiv preprint arXiv: 2302.13971, 2023.Touvron H, Lavril T, Izacard G, Martinet X, Lachaux M A, Lacroix T, et al. LLaMA: Open and efficient foundation language models. arXiv preprint arXiv: 2302.13971, 2023. [7] Touvron H, Martin L, Stone K, Albert P, Almahairi A, Babaei Y, et al. Llama 2: Open foundation and fine-tuned chat models. arXiv preprint arXiv: 2307.09288, 2023.Touvron H, Martin L, Stone K, Albert P, Almahairi A, Babaei Y, et al. Llama 2: Open foundation and fine-tuned chat models. arXiv preprint arXiv: 2307.09288, 2023. [8] Anil R, Borgeaud S, Alayrac J B, Yu J H, Soricut R, Schalkwyk J, et al. Gemini: A family of highly capable multimodal models. arXiv preprint arXiv: 2312.11805, 2024.Anil R, Borgeaud S, Alayrac J B, Yu J H, Soricut R, Schalkwyk J, et al. Gemini: A family of highly capable multimodal models. arXiv preprint arXiv: 2312.11805, 2024. [9] Georgiev P, Lei V I, Burnell R, Bai L B, Gulati A, Tanzer G, et al. Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context. arXiv preprint arXiv: 2403.05530, 2024.Georgiev P, Lei V I, Burnell R, Bai L B, Gulati A, Tanzer G, et al. Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context. arXiv preprint arXiv: 2403.05530, 2024. [10] Li J N, Li D X, Xiong C M, Hoi S. BLIP: Bootstrapping language-image pre-training for unified vision-language understanding and generation. arXiv preprint arXiv: 2201.12086, 2022.Li J N, Li D X, Xiong C M, Hoi S. BLIP: Bootstrapping language-image pre-training for unified vision-language understanding and generation. arXiv preprint arXiv: 2201.12086, 2022. [11] Li J N, Li D X, Savarese S, Hoi S C H. BLIP-2: Bootstrapping language-image pre-training with frozen image encoders and large language models. In: Proceedings of the International Conference on Machine Learning. Honolulu, USA: PMLR, 2023. 19730−19742 [12] Wake N, Kanehira A, Sasabuchi K, Takamatsu J, Ikeuchi K. GPT-4V(ision) for robotics: Multimodal task planning from human demonstration. IEEE Robotics and Automation Letters, 2024, 9(11): 10567−10574 doi: 10.1109/LRA.2024.3477090 [13] Li B Y, Weinberger K Q, Belongie S J, Koltun V, Ranftl R. Language-driven semantic segmentation. In: Proceedings of the 10th International Conference on Learning Representations. OpenReview.net, 2022.Li B Y, Weinberger K Q, Belongie S J, Koltun V, Ranftl R. Language-driven semantic segmentation. In: Proceedings of the 10th International Conference on Learning Representations. OpenReview.net, 2022. [14] Gu X Y, Lin T Y, Kuo W C, Cui Y. Open-vocabulary object detection via vision and language knowledge distillation. arXiv preprint arXiv: 2104.13921, 2022.Gu X Y, Lin T Y, Kuo W C, Cui Y. Open-vocabulary object detection via vision and language knowledge distillation. arXiv preprint arXiv: 2104.13921, 2022. [15] Antol S, Agrawal A, Lu J S, Mitchell M, Batra D, Zitnick C L, et al. VQA: Visual question answering. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Santiago, Chile: IEEE, 2016. [16] Caron M, Touvron H, Misra I, Jégou H, Mairal J, Bojanowski P, et al. Emerging properties in self-supervised vision transformers. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Montreal, Canada: IEEE, 2021. [17] Radford A, Kim J W, Hallacy C, Ramesh A, Goh G, Agarwal S, et al. Learning transferable visual models from natural language supervision. In: Proceedings of the 38th International Conference on Machine Learning. PMLR, 2021.Radford A, Kim J W, Hallacy C, Ramesh A, Goh G, Agarwal S, et al. Learning transferable visual models from natural language supervision. In: Proceedings of the 38th International Conference on Machine Learning. PMLR, 2021. [18] Kirillov A, Mintun E, Ravi N, Mao H Z, Rolland C, Gustafson L, et al. Segment anything. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. [19] Bommasani R, Hudson D A, Adeli E, Altman R, Arora S, von Arx S, et al. On the opportunities and risks of foundation models. arXiv preprint arXiv: 2108.07258, 2022.Bommasani R, Hudson D A, Adeli E, Altman R, Arora S, von Arx S, et al. On the opportunities and risks of foundation models. arXiv preprint arXiv: 2108.07258, 2022. [20] 杨雨彤. AI大模型与具身智能终将相遇. 机器人产业, 2024(2): 71−74Yang Yu-Tong. AI large models and embodied intelligence will eventually meet. Robot Industry, 2024(2): 71−74 [21] Gupta A, Savarese S, Ganguli S, Fei-Fei L. Embodied intelligence via learning and evolution. Nature Communications, 2021, 12(1): Article No. 5721 doi: 10.1038/s41467-021-25874-z [22] 刘华平, 郭迪, 孙富春, 张新钰. 基于形态的具身智能研究: 历史回顾与前沿进展. 自动化学报, 2023, 49(6): 1131−1154Liu Hua-Ping, Guo Di, Sun Fu-Chun, Zhang Xin-Yu. Morphology-based embodied intelligence: Historical retrospect and research progress. Acta Automatica Sinica, 2023, 49(6): 1131−1154 [23] 兰沣卜, 赵文博, 朱凯, 张涛. 基于具身智能的移动操作机器人系统发展研究. 中国工程科学, 2024, 26(1): 139−148 doi: 10.15302/J-SSCAE-2024.01.010Lan Feng-Bo, Zhao Wen-Bo, Zhu Kai, Zhang Tao. Development of mobile manipulator robot system with embodied intelligence. Strategic Study of CAE, 2024, 26(1): 139−148 doi: 10.15302/J-SSCAE-2024.01.010 [24] Firoozi R, Tucker J, Tian S, Majumdar A, Sun J K, Liu W Y, et al. Foundation models in robotics: Applications, challenges, and the future. arXiv preprint arXiv: 2312.07843v1, 2023. [25] Wang J Q, Wu Z H, Li Y W, Jiang H Q, Shu P, Shi E Z, et al. Large language models for robotics: Opportunities, challenges, and perspectives. arXiv preprint arXiv: 2401.04334, 2024.Wang J Q, Wu Z H, Li Y W, Jiang H Q, Shu P, Shi E Z, et al. Large language models for robotics: Opportunities, challenges, and perspectives. arXiv preprint arXiv: 2401.04334, 2024. [26] Kim Y, Kim D, Choi J, Park J, Oh N, Park D. A survey on integration of large language models with intelligent robots. Intelligent Service Robotics, 2024, 17(5): 1091−1107 doi: 10.1007/s11370-024-00550-5 [27] Hu Y F, Xie Q T, Jain V, Francis J, Patrikar J, Keetha N, et al. Toward general-purpose robots via foundation models: A survey and meta-analysis. arXiv preprint arXiv: 2312.08782, 2023.Hu Y F, Xie Q T, Jain V, Francis J, Patrikar J, Keetha N, et al. Toward general-purpose robots via foundation models: A survey and meta-analysis. arXiv preprint arXiv: 2312.08782, 2023. [28] Liu Y, Chen W X, Bai Y J, Liang X D, Li G B, Gao W, et al. Aligning cyber space with physical world: A comprehensive survey on embodied AI. arXiv preprint arXiv: 2407.06886, 2024.Liu Y, Chen W X, Bai Y J, Liang X D, Li G B, Gao W, et al. Aligning cyber space with physical world: A comprehensive survey on embodied AI. arXiv preprint arXiv: 2407.06886, 2024. [29] Yang Z Y, Li L J, Lin K, Wang J F, Lin C C, Liu Z C, et al. The dawn of LMMs: Preliminary explorations with GPT-4V(ision). arXiv preprint arXiv: 2309.17421, 2023.Yang Z Y, Li L J, Lin K, Wang J F, Lin C C, Liu Z C, et al. The dawn of LMMs: Preliminary explorations with GPT-4V(ision). arXiv preprint arXiv: 2309.17421, 2023. [30] Hu Y D, Lin F Q, Zhang T, Yi L, Gao Y. Look before you leap: Unveiling the power of GPT-4V in robotic vision-language planning. arXiv preprint arXiv: 2311.17842, 2023.Hu Y D, Lin F Q, Zhang T, Yi L, Gao Y. Look before you leap: Unveiling the power of GPT-4V in robotic vision-language planning. arXiv preprint arXiv: 2311.17842, 2023. [31] Fan L X, Wang G Z, Jiang Y F, Mandlekar A, Yang Y C, Zhu H Y, et al. MineDojo: Building open-ended embodied agents with internet-scale knowledge. arXiv preprint arXiv: 2206.08853, 2022.Fan L X, Wang G Z, Jiang Y F, Mandlekar A, Yang Y C, Zhu H Y, et al. MineDojo: Building open-ended embodied agents with internet-scale knowledge. arXiv preprint arXiv: 2206.08853, 2022. [32] Bahl S, Mendonca R, Chen L L, Jain U, Pathak D. Affordances from human videos as a versatile representation for robotics. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. [33] Baker B, Akkaya I, Zhokhov P, Huizinga J, Tang J, Ecoffet A, et al. Video PreTraining (VPT): Learning to act by watching unlabeled online videos. In: Proceedings of the 36th International Conference on Neural Information Processing Systems. New Orleans, USA: 2022.Baker B, Akkaya I, Zhokhov P, Huizinga J, Tang J, Ecoffet A, et al. Video PreTraining (VPT): Learning to act by watching unlabeled online videos. In: Proceedings of the 36th International Conference on Neural Information Processing Systems. New Orleans, USA: 2022. [34] Sontakke S, Zhang J, Arnold S M R, Pertsch K, Biyik E, Sadigh D, et al. RoboCLIP: One demonstration is enough to learn robot policies. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023.Sontakke S, Zhang J, Arnold S M R, Pertsch K, Biyik E, Sadigh D, et al. RoboCLIP: One demonstration is enough to learn robot policies. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023. [35] Seo Y, Lee K, James S, Abbeel P. Reinforcement learning with action-free pre-training from videos. In: Proceedings of the 39th International Conference on Machine Learning. Baltimore, USA: PMLR, 2022. [36] Han L, Zhu Q X, Sheng J P, Zhang C, Li T G, Zhang Y Z, et al. Lifelike agility and play in quadrupedal robots using reinforcement learning and generative pre-trained models. Nature Machine Intelligence, 2024, 6(7): 787−798 doi: 10.1038/s42256-024-00861-3 [37] Zhao T Z, Kumar V, Levine S, Finn C. Learning fine-grained bimanual manipulation with low-cost hardware. arXiv preprint arXiv: 2304.13705, 2023.Zhao T Z, Kumar V, Levine S, Finn C. Learning fine-grained bimanual manipulation with low-cost hardware. arXiv preprint arXiv: 2304.13705, 2023. [38] Chi C, Xu Z J, Pan C, Cousineau E, Burchfiel B, Feng S Y, et al. Universal manipulation interface: In-the-wild robot teaching without in-the-wild robots. arXiv preprint arXiv: 2402.10329v3, 2024.Chi C, Xu Z J, Pan C, Cousineau E, Burchfiel B, Feng S Y, et al. Universal manipulation interface: In-the-wild robot teaching without in-the-wild robots. arXiv preprint arXiv: 2402.10329v3, 2024. [39] Fu Z P, Zhao Q Q, Wu Q, Wetzstein G, Finn C. HumanPlus: Humanoid shadowing and imitation from humans. arXiv preprint arXiv: 2406.10454, 2024.Fu Z P, Zhao Q Q, Wu Q, Wetzstein G, Finn C. HumanPlus: Humanoid shadowing and imitation from humans. arXiv preprint arXiv: 2406.10454, 2024. [40] Wu P, Shentu Y, Yi Z K, Lin X Y, Abbeel P. GELLO: A general, low-cost, and intuitive teleoperation framework for robot manipulators. arXiv preprint arXiv: 2309.13037, 2023.Wu P, Shentu Y, Yi Z K, Lin X Y, Abbeel P. GELLO: A general, low-cost, and intuitive teleoperation framework for robot manipulators. arXiv preprint arXiv: 2309.13037, 2023. [41] Kim H, Ohmura Y, Kuniyoshi Y. Goal-conditioned dual-action imitation learning for dexterous dual-arm robot manipulation. IEEE Transactions on Robotics, 2024, 40: 2287−2305 doi: 10.1109/TRO.2024.3372778 [42] Wang Y F, Xian Z, Chen F, Wang T H, Wang Y, Fragkiadaki K, et al. RoboGen: Towards unleashing infinite data for automated robot learning via generative simulation. In: Proceedings of the 41st International Conference on Machine Learning. Vienna, Austria: OpenReview.net, 2024. [43] Mandlekar A, Nasiriany S, Wen B W, Akinola I, Narang Y S, Fan L X, et al. MimicGen: A data generation system for scalable robot learning using human demonstrations. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [44] Ha H, Florence P, Song S. Scaling up and distilling down: Language-guided robot skill acquisition. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [45] Ma Y J, Liang W, Wang H J, Wang S, Zhu Y K, Fan L X, et al. DrEureka: Language model guided sim-to-real transfer. arXiv preprint arXiv: 2406.01967, 2024.Ma Y J, Liang W, Wang H J, Wang S, Zhu Y K, Fan L X, et al. DrEureka: Language model guided sim-to-real transfer. arXiv preprint arXiv: 2406.01967, 2024. [46] Luo Z Y, Cao J K, Christen S, Winkler A, Kitani K, Xu W P. Grasping diverse objects with simulated humanoids. arXiv preprint arXiv: 2407.11385, 2024.Luo Z Y, Cao J K, Christen S, Winkler A, Kitani K, Xu W P. Grasping diverse objects with simulated humanoids. arXiv preprint arXiv: 2407.11385, 2024. [47] Yu T H, Quillen D, He Z P, Julian R, Hausman K, Finn C, et al. Meta-world: A benchmark and evaluation for multi-task and meta reinforcement learning. In: Proceedings of the 3rd Annual Conference on Robot Learning. Osaka, Japan: PMLR, 2019. [48] Li C S, Zhang R H, Wong J, Gokmen C, Srivastava S, Martín-Martín R, et al. BEHAVIOR-1K: A human-centered, embodied AI benchmark with 1 000 everyday activities and realistic simulation. arXiv preprint arXiv: 2403.09227, 2024.Li C S, Zhang R H, Wong J, Gokmen C, Srivastava S, Martín-Martín R, et al. BEHAVIOR-1K: A human-centered, embodied AI benchmark with 1 000 everyday activities and realistic simulation. arXiv preprint arXiv: 2403.09227, 2024. [49] Wu J, Antonova R, Kan A, Lepert M, Zeng A, Song S R, et al. TidyBot: Personalized robot assistance with large language models. Autonomous Robots, 2023, 47(8): 1087−1102 doi: 10.1007/s10514-023-10139-z [50] Jiang Y F, Gupta A, Zhang Z C, Wang G Z, Dou Y Q, Chen Y J, et al. VIMA: General robot manipulation with multimodal prompts. arXiv preprint arXiv: 2210.03094, 2022.Jiang Y F, Gupta A, Zhang Z C, Wang G Z, Dou Y Q, Chen Y J, et al. VIMA: General robot manipulation with multimodal prompts. arXiv preprint arXiv: 2210.03094, 2022. [51] Huang S Y, Jiang Z K, Dong H, Qiao Y, Gao P, Li H S. Instruct2Act: Mapping multi-modality instructions to robotic actions with large language model. arXiv preprint arXiv: 2305.11176, 2023.Huang S Y, Jiang Z K, Dong H, Qiao Y, Gao P, Li H S. Instruct2Act: Mapping multi-modality instructions to robotic actions with large language model. arXiv preprint arXiv: 2305.11176, 2023. [52] Huang W L, Wang C, Zhang R H, Li Y Z, Wu J J, Li F F. VoxPoser: Composable 3D value maps for robotic manipulation with language models. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023.Huang W L, Wang C, Zhang R H, Li Y Z, Wu J J, Li F F. VoxPoser: Composable 3D value maps for robotic manipulation with language models. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [53] Brohan A, Brown N, Carbajal J, Chebotar Y, Dabis J, Finn C, et al. RT-1: Robotics transformer for real-world control at scale. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023.Brohan A, Brown N, Carbajal J, Chebotar Y, Dabis J, Finn C, et al. RT-1: Robotics transformer for real-world control at scale. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023. [54] Zitkovich B, Yu T H, Xu S C, Xu P, Xiao T, Xia F, et al. RT-2: Vision-language-action models transfer web knowledge to robotic control. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [55] O'Neill A, Rehman A, Gupta A, Maddukuri A, Gupta A, Padalkar A, et al. Open X-embodiment: Robotic learning datasets and RT-X models. arXiv preprint arXiv: 2310.08864, 2023.O'Neill A, Rehman A, Gupta A, Maddukuri A, Gupta A, Padalkar A, et al. Open X-embodiment: Robotic learning datasets and RT-X models. arXiv preprint arXiv: 2310.08864, 2023. [56] Durante Z, Sarkar B, Gong R, Taori R, Noda Y, Tang P, et al. An interactive agent foundation model. arXiv preprint arXiv: 2402.05929, 2024. [57] Wang W Y, Lei Y T, Jin S Y, Hager G D, Zhang L J. VIHE: Virtual in-hand eye transformer for 3D robotic manipulation. arXiv preprint arXiv: 2403.11461, 2024.Wang W Y, Lei Y T, Jin S Y, Hager G D, Zhang L J. VIHE: Virtual in-hand eye transformer for 3D robotic manipulation. arXiv preprint arXiv: 2403.11461, 2024. [58] Aldaco J, Armstrong T, Baruch R, Bingham J, Chan S, Draper K, et al. ALOHA 2: An enhanced low-cost hardware for bimanual teleoperation. arXiv preprint arXiv: 2405.02292, 2024.Aldaco J, Armstrong T, Baruch R, Bingham J, Chan S, Draper K, et al. ALOHA 2: An enhanced low-cost hardware for bimanual teleoperation. arXiv preprint arXiv: 2405.02292, 2024. [59] Wang Y J, Zhang B K, Chen J Y, Sreenath K. Prompt a robot to walk with large language models. arXiv preprint arXiv: 2309.09969, 2023.Wang Y J, Zhang B K, Chen J Y, Sreenath K. Prompt a robot to walk with large language models. arXiv preprint arXiv: 2309.09969, 2023. [60] Reed S, Zolna K, Parisotto E, Colmenarejo S G, Novikov A, Barth-Maron G, et al. A generalist agent. arXiv preprint arXiv: 2205.06175, 2022.Reed S, Zolna K, Parisotto E, Colmenarejo S G, Novikov A, Barth-Maron G, et al. A generalist agent. arXiv preprint arXiv: 2205.06175, 2022. [61] Li X H, Liu M H, Zhang H B, Yu C J, Xu J, Wu H T, et al. Vision-language foundation models as effective robot imitators. In: Proceedings of the 12th International Conference on Learning Representations. Vienna, Austria: OpenReview.net, 2024. [62] Li X Q, Zhang M X, Geng Y R, Geng H R, Long Y X, Shen Y, et al. ManipLLM: Embodied multimodal large language model for object-centric robotic manipulation. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. [63] Zhen H Y, Qiu X W, Chen P H, Yang J C, Yan X, Du Y L, et al. 3D-VLA: A 3D vision-language-action generative world model. In: Proceedings of the 41st International Conference on Machine Learning. Vienna, Austria: OpenReview.net, 2024. [64] Wu J L, Yin S F, Feng N Y, He X, Li D, Hao J Y, et al. iVideoGPT: Interactive VideoGPTs are scalable world models. arXiv preprint arXiv: 2405.15223, 2024.Wu J L, Yin S F, Feng N Y, He X, Li D, Hao J Y, et al. iVideoGPT: Interactive VideoGPTs are scalable world models. arXiv preprint arXiv: 2405.15223, 2024. [65] Zhang J Z, Wang K Y, Xu R T, Zhou G Z, Hong Y C, Fang X M, et al. NaVid: Video-based VLM plans the next step for vision-and-language navigation. arXiv preprint arXiv: 2402.15852, 2024.Zhang J Z, Wang K Y, Xu R T, Zhou G Z, Hong Y C, Fang X M, et al. NaVid: Video-based VLM plans the next step for vision-and-language navigation. arXiv preprint arXiv: 2402.15852, 2024. [66] Mandi Z, Jain S, Song S R. RoCo: Dialectic multi-robot collaboration with large language models. arXiv preprint arXiv: 2307.04738, 2023.Mandi Z, Jain S, Song S R. RoCo: Dialectic multi-robot collaboration with large language models. arXiv preprint arXiv: 2307.04738, 2023. [67] Jiao A R, Patel T P, Khurana S, Korol A M, Brunke L, Adajania V K, et al. Swarm-GPT: Combining large language models with safe motion planning for robot choreography design. arXiv preprint arXiv: 2312.01059, 2023.Jiao A R, Patel T P, Khurana S, Korol A M, Brunke L, Adajania V K, et al. Swarm-GPT: Combining large language models with safe motion planning for robot choreography design. arXiv preprint arXiv: 2312.01059, 2023. [68] Huang W L, Wang C, Li Y Z, Zhang R H, Li F F. ReKep: Spatio-temporal reasoning of relational keypoint constraints for robotic manipulation. arXiv preprint arXiv: 2409.01652, 2024.Huang W L, Wang C, Li Y Z, Zhang R H, Li F F. ReKep: Spatio-temporal reasoning of relational keypoint constraints for robotic manipulation. arXiv preprint arXiv: 2409.01652, 2024. [69] Liu P Q, Orru Y, Vakil J, Paxton C, Shafiullah N M M, Pinto L. OK-robot: What really matters in integrating open-knowledge models for robotics. arXiv preprint arXiv: 2401.12202, 2024.Liu P Q, Orru Y, Vakil J, Paxton C, Shafiullah N M M, Pinto L. OK-robot: What really matters in integrating open-knowledge models for robotics. arXiv preprint arXiv: 2401.12202, 2024. [70] Liang J, Huang W L, Xia F, Xu P, Hausman K, Ichter B, et al. Code as policies: Language model programs for embodied control. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. [71] Ding Y, Zhang X H, Paxton C, Zhang S Q. Task and motion planning with large language models for object rearrangement. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. [72] Lin K, Agia C, Migimatsu T, Pavone M, Bohg J. Text2Motion: From natural language instructions to feasible plans. Autonomous Robots, 2023, 47(8): 1345−1365 doi: 10.1007/s10514-023-10131-7 [73] Driess D, Xia F, Sajjadi M S M, Lynch C, Chowdhery A, Ichter B, et al. PaLM-E: An embodied multimodal language model. In: Proceedings of the 40th International Conference on Machine Learning. Honolulu, USA: JMLR.org, 2023. [74] Ichter B, Brohan A, Chebotar Y, Finn C, Hausman K, Herzog A, et al. Do as I can, not as I say: Grounding language in robotic affordances. In: Proceedings of the 6th Conference on Robot Learning. Auckland, New Zealand: PMLR, 2023. [75] Mu Y, Zhang Q L, Hu M K, Wang W H, Ding M Y, Jin J, et al. EmbodiedGPT: Vision-language pre-training via embodied chain of thought. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023.Mu Y, Zhang Q L, Hu M K, Wang W H, Ding M Y, Jin J, et al. EmbodiedGPT: Vision-language pre-training via embodied chain of thought. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023. [76] Du Y Q, Watkins O, Wang Z H, Colas C, Darrell T, Abbeel P, et al. Guiding pretraining in reinforcement learning with large language models. In: Proceedings of the 40th International Conference on Machine Learning. Honolulu, USA: PMLR, 2023. [77] Wang G Z, Xie Y Q, Jiang Y F, Mandlekar A, Xiao C W, Zhu Y K, et al. Voyager: An open-ended embodied agent with large language models. arXiv preprint arXiv: 2305.16291, 2023.Wang G Z, Xie Y Q, Jiang Y F, Mandlekar A, Xiao C W, Zhu Y K, et al. Voyager: An open-ended embodied agent with large language models. arXiv preprint arXiv: 2305.16291, 2023. [78] Song C H, Sadler B M, Wu J M, Chao W L, Washington C, Su Y. LLM-planner: Few-shot grounded planning for embodied agents with large language models. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. [79] Ren A Z, Dixit A, Bodrova A, Singh S, Tu S, Brown N, et al. Robots that ask for help: Uncertainty alignment for large language model planners. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [80] Liu H H, Chen A C, Zhu Y K, Swaminathan A, Kolobov A, Cheng C A. Interactive robot learning from verbal correction. arXiv preprint arXiv: 2310.17555, 2023.Liu H H, Chen A C, Zhu Y K, Swaminathan A, Kolobov A, Cheng C A. Interactive robot learning from verbal correction. arXiv preprint arXiv: 2310.17555, 2023. [81] Shi L X, Hu Z Y, Zhao T Z, Sharma A, Pertsch K, Luo J L, et al. Yell at your robot: Improving on-the-fly from language corrections. arXiv preprint arXiv: 2403.12910, 2024.Shi L X, Hu Z Y, Zhao T Z, Sharma A, Pertsch K, Luo J L, et al. Yell at your robot: Improving on-the-fly from language corrections. arXiv preprint arXiv: 2403.12910, 2024. [82] Zeng A, Attarian M, Ichter B, Choromanski K M, Wong A, Welker S, et al. Socratic models: Composing zero-shot multimodal reasoning with language. In: Proceedings of the 11th International Conference on Learning Representations. Kigali, Rwanda: OpenReview.net, 2023. [83] Shah R, R. Martín-Martín R, Zhu Y K. MUTEX: Learning unified policies from multimodal task specifications. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [84] Dai Y P, Peng R, Li S K, Chai J. Think, act, and ask: Open-world interactive personalized robot navigation. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Yokohama, Japan: IEEE, 2024. [85] Liu F C, Fang K, Abbeel P, Levine S. MOKA: Open-world robotic manipulation through mark-based visual prompting. arXiv preprint arXiv: 2403.03174, 2024.Liu F C, Fang K, Abbeel P, Levine S. MOKA: Open-world robotic manipulation through mark-based visual prompting. arXiv preprint arXiv: 2403.03174, 2024. [86] James S, Wada K, Laidlow T, Davison A J. Coarse-to-fine Q-attention: Efficient learning for visual robotic manipulation via discretisation. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. [87] Shridhar M, Manuelli L, Fox D. Perceiver-Actor: A multi-task transformer for robotic manipulation. In: Proceedings of the 6th Conference on Robot Learning. Auckland, New Zealand: PMLR, 2023. [88] Qin M H, Li W H, Zhou J W, Wang H Q, Pfister H. LangSplat: 3D language gaussian splatting. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. [89] Shorinwa O, Tucker J, Smith A, Swann A, Chen T, Firoozi R, et al. Splat-MOVER: Multi-stage, open-vocabulary robotic manipulation via editable Gaussian splatting. arXiv preprint arXiv: 2405.04378, 2024. [90] Yang J N, Chen X W Y, Qian S Y, Madaan N, Iyengar M, Fouhey D F, et al. LLM-Grounder: Open-vocabulary 3D visual grounding with large language model as an agent. arXiv preprint arXiv: 2309.12311, 2023.Yang J N, Chen X W Y, Qian S Y, Madaan N, Iyengar M, Fouhey D F, et al. LLM-Grounder: Open-vocabulary 3D visual grounding with large language model as an agent. arXiv preprint arXiv: 2309.12311, 2023. [91] Huang C G, Mees O, Zeng A, Burgard W. Audio visual language maps for robot navigation. arXiv preprint arXiv: 2303.07522, 2023.Huang C G, Mees O, Zeng A, Burgard W. Audio visual language maps for robot navigation. arXiv preprint arXiv: 2303.07522, 2023. [92] Gervet T, Xian Z, Gkanatsios N, Fragkiadaki K. Act3D: 3D feature field transformers for multi-task robotic manipulation. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [93] Zhang K F, Li B Y, Hauser K, Li Y Z. AdaptiGraph: Material-adaptive graph-based neural dynamics for robotic manipulation. arXiv preprint arXiv: 2407.07889, 2024.Zhang K F, Li B Y, Hauser K, Li Y Z. AdaptiGraph: Material-adaptive graph-based neural dynamics for robotic manipulation. arXiv preprint arXiv: 2407.07889, 2024. [94] Qian S Y, Chen W F, Bai M, Zhou X, Tu Z W, Li L E. AffordanceLLM: Grounding affordance from vision language models. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Seattle, USA: IEEE, 2024. [95] Ye Y F, Li X T, Gupta A, de Mellon S, Birchfield S, Song J M, et al. Affordance diffusion: Synthesizing hand-object interactions. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Vancouver, Canada: IEEE, 2023. 22479−22489 [96] Huang H X, Lin F Q, Hu Y D, Wang S J, Gao Y. CoPa: General robotic manipulation through spatial constraints of parts with foundation models. arXiv preprint arXiv: 2403.08248, 2024.Huang H X, Lin F Q, Hu Y D, Wang S J, Gao Y. CoPa: General robotic manipulation through spatial constraints of parts with foundation models. arXiv preprint arXiv: 2403.08248, 2024. [97] Qin Z Y, Fang K, Zhu Y K, Fei-Fei L, Savarese S. KETO: Learning keypoint representations for tool manipulation. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020.Qin Z Y, Fang K, Zhu Y K, Fei-Fei L, Savarese S. KETO: Learning keypoint representations for tool manipulation. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. [98] Ju Y C, Hu K Z, Zhang G W, Zhang G, Jiang M R, Xu H Z. Robo-ABC: Affordance generalization beyond categories via semantic correspondence for robot manipulation. arXiv preprint arXiv: 2401.07487, 2024.Ju Y C, Hu K Z, Zhang G W, Zhang G, Jiang M R, Xu H Z. Robo-ABC: Affordance generalization beyond categories via semantic correspondence for robot manipulation. arXiv preprint arXiv: 2401.07487, 2024. [99] Sundaresan P, Belkhale S, Sadigh D, Bohg J. KITE: Keypoint-conditioned policies for semantic manipulation. In: Proceedings of the 7th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [100] Hong Y N, Zheng Z S, Chen P H, Wang Y, Li J Y, Gan C. MultiPLY: A multisensory object-centric embodied large language model in 3D world. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. [101] Liu H T, Li C Y, Wu Q Y, Lee Y J. Visual instruction tuning. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023.Liu H T, Li C Y, Wu Q Y, Lee Y J. Visual instruction tuning. In: Proceedings of the 37th International Conference on Neural Information Processing Systems. New Orleans, USA: 2023. [102] Yenamandra S, Ramachandran A, Yadav K, Wang A S, Khanna M, Gervet T, et al. HomeRobot: Open-vocabulary mobile manipulation. In: Proceedings of the 37th Conference on Robot Learning. Atlanta, USA: PMLR, 2023. [103] Shafiullah N M M, Paxton C, Pinto L, Chintala S, Szlam A. CLIP-fields: Weakly supervised semantic fields for robotic memory. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023.Shafiullah N M M, Paxton C, Pinto L, Chintala S, Szlam A. CLIP-fields: Weakly supervised semantic fields for robotic memory. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023. [104] He K M, Zhang X Y, Ren S Q, Sun J. Deep residual learning for image recognition. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. [105] Lin T Y, Dollár P, Girshick R, He K M, Hariharan B, Belongie S. Feature pyramid networks for object detection. arXiv preprint arXiv: 1612.03144, 2016.Lin T Y, Dollár P, Girshick R, He K M, Hariharan B, Belongie S. Feature pyramid networks for object detection. arXiv preprint arXiv: 1612.03144, 2016. [106] Mildenhall B, Srinivasan P P, Tancik M, Barron J T, Ramamoorthi R, Ng R. NeRF: Representing scenes as neural radiance fields for view synthesis. In: Proceedings of the 16th European Conference. Glasgow, UK: Springer, 2020. [107] Shen W, Yang G, Yu A L, Wong J, Kaelbling L P, Isola P. Distilled feature fields enable few-shot language-guided manipulation. arXiv preprint arXiv: 2308.07931, 2023.Shen W, Yang G, Yu A L, Wong J, Kaelbling L P, Isola P. Distilled feature fields enable few-shot language-guided manipulation. arXiv preprint arXiv: 2308.07931, 2023. [108] Kerbl B, Kopanas G, Leimkuehler T, Drettakis G. 3D Gaussian splatting for real-time radiance field rendering. ACM Transactions on Graphics (TOG), 2023, 42(4): Article No. 139 [109] Fei B, Xu J Y, Zhang R, Zhou Q Y, Yang W D, He Y. 3D Gaussian as a new era: A survey. arXiv preprint arXiv: 2402.07181, 2024.Fei B, Xu J Y, Zhang R, Zhou Q Y, Yang W D, He Y. 3D Gaussian as a new era: A survey. arXiv preprint arXiv: 2402.07181, 2024. [110] Kerr J, Kim C M, Goldberg K, Kanazawa A, Tancik M. LERF: Language embedded radiance fields. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Paris, France: IEEE, 2023. [111] Matsuki H, Murai R, Kelly P H J, Davison A J. Gaussian splatting SLAM. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. [112] Zhu S T, Qin R J, Wang G M, Liu J M, Wang H S. SemGauss-SLAM: Dense semantic Gaussian splatting SLAM. arXiv preprint arXiv: 2403.07494, 2024.Zhu S T, Qin R J, Wang G M, Liu J M, Wang H S. SemGauss-SLAM: Dense semantic Gaussian splatting SLAM. arXiv preprint arXiv: 2403.07494, 2024. [113] Hassanin M, Khan S, Tahtali M. Visual affordance and function understanding: A survey. ACM Computing Surveys (CSUR), 2022, 54(3): Article No. 47 [114] Cui Y C, Niekum S, Gupta A, Kumar V, Rajeswaran A. Can foundation models perform zero-shot task specification for robot manipulation? In: Proceedings of the 4th Learning for Dynamics and Control Conference. Stanford, USA: PMLR, 2022. [115] Mandi Z, Bharadhwaj H, Moens V, Song S, Rajeswaran A, Kumar V. CACTI: A framework for scalable multi-task multi-scene visual imitation learning. arXiv preprint arXiv: 2212.05711, 2022.Mandi Z, Bharadhwaj H, Moens V, Song S, Rajeswaran A, Kumar V. CACTI: A framework for scalable multi-task multi-scene visual imitation learning. arXiv preprint arXiv: 2212.05711, 2022. [116] Yu T H, Xiao T, Tompson J, Stone A, Wang S, Brohan A, et al. Scaling robot learning with semantically imagined experience. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023.Yu T H, Xiao T, Tompson J, Stone A, Wang S, Brohan A, et al. Scaling robot learning with semantically imagined experience. In: Proceedings of the 19th Robotics: Science and Systems. Daegu, South Korea: 2023. [117] Siciliano B, Sciavicco L, Villani L, Oriolo G. Robotics: Modelling, Planning and Control. London: Springer, 2009. [118] Wei J, Wang X Z, Schuurmans D, Bosma M, Ichter B, Xia F, et al. Chain-of-thought prompting elicits reasoning in large language models. In: Proceedings of the 36th International Conference on Neural Information Processing Systems. New Orleans, USA: Curran Associates Inc., 2022. [119] Minderer M, Gritsenko A, Stone A, Neumann M, Weissenborn D, Dosovitskiy A, et al. Simple open-vocabulary object detection. In: Proceedings of the 17th European Conference. Tel Aviv, Israel: Springer, 2022. [120] Harris C R, Millman K J, van der Walt S J, Gommers R, Virtanen P, Cournapeau D, et al. Array programming with NumPy. Nature, 2020, 585(7825): 357−362 doi: 10.1038/s41586-020-2649-2 [121] Zhang R R, Han J M, Liu C, Gao P, Zhou A J, Hu X F, et al. LLaMA-adapter: Efficient fine-tuning of language models with zero-init attention. arXiv preprint arXiv: 2303.16199, 2023.Zhang R R, Han J M, Liu C, Gao P, Zhou A J, Hu X F, et al. LLaMA-adapter: Efficient fine-tuning of language models with zero-init attention. arXiv preprint arXiv: 2303.16199, 2023. [122] Vaswani A, Shazeer N, Parmar N, Uszkoreit J, Jones L, Gomez A N, et al. Attention is all you need. In: Proceedings of the 31st International Conference on Neural Information Processing Systems. Long Beach, USA: Curran Associates Inc., 2017. [123] Cer D, Yang Y F, Kong S Y, Hua N, Limtiaco N, John R S, et al. Universal sentence encoder. arXiv preprint arXiv: 1803.11175, 2018.Cer D, Yang Y F, Kong S Y, Hua N, Limtiaco N, John R S, et al. Universal sentence encoder. arXiv preprint arXiv: 1803.11175, 2018. [124] Tan M X, Le Q V. EfficientNet: Rethinking model scaling for convolutional neural networks. In: Proceedings of the 36th International Conference on Machine Learning. Long Beach, USA: PMLR, 2019. [125] Perez E, Strub F, de Vries H, Dumoulin V, Courville A C. FiLM: Visual reasoning with a general conditioning layer. In: Proceedings of the 32nd AAAI Conference on Artificial Intelligence. New Orleans, USA: AAAI Press, 2018. [126] Chen X, Djolonga J, Padlewski P, Mustafa B, Changpinyo S, Wu J L, et al. PaLI-X: On scaling up a multilingual vision and language model. arXiv preprint arXiv: 2305.18565, 2023.Chen X, Djolonga J, Padlewski P, Mustafa B, Changpinyo S, Wu J L, et al. PaLI-X: On scaling up a multilingual vision and language model. arXiv preprint arXiv: 2305.18565, 2023. [127] Kingma D P, Welling M. Auto-encoding variational Bayes. In: Proceedings of the 2nd International Conference on Learning Representations. Banff, Canada: 2014.Kingma D P, Welling M. Auto-encoding variational Bayes. In: Proceedings of the 2nd International Conference on Learning Representations. Banff, Canada: 2014. [128] Devlin J, Chang M W, Lee K, Toutanova K. BERT: Pre-training of deep bidirectional transformers for language understanding. arXiv preprint arXiv: 1810.04805, 2019. [129] Fu Z, Zhao T Z, Finn C. Mobile ALOHA: Learning bimanual mobile manipulation with low-cost whole-body teleoperation. arXiv preprint arXiv: 2401.02117v1, 2024. [130] James S, Ma Z C, Arrojo D R, Davison A J. RLBench: The robot learning benchmark and learning environment. IEEE Robotics and Automation Letters, 2020, 5(2): 3019−3026 doi: 10.1109/LRA.2020.2974707 [131] Xia F, Shen W B, Li C S, Kasimbeg P, Tchapmi M E, Toshev A, et al. Interactive Gibson benchmark: A benchmark for interactive navigation in cluttered environments. IEEE Robotics and Automation Letters, 2020, 5(2): 713−720 doi: 10.1109/LRA.2020.2965078 [132] Shridhar M, Thomason J, Gordon D, Bisk Y, Han W, Mottaghi R, et al. ALFRED: A benchmark for interpreting grounded instructions for everyday tasks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. [133] Puig X, Ra K, Boben M, Li J M, Wang T W, Fidler S, et al. VirtualHome: Simulating household activities via programs. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. [134] Gan C, Zhou S Y, Schwartz J, Alter S, Bhandwaldar A, Gutfreund D, et al. The ThreeDWorld transport challenge: A visually guided task-and-motion planning benchmark towards physically realistic embodied AI. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. [135] Weihs L, Deitke M, Kembhavi A, Mottaghi R. Visual room rearrangement. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. [136] Makoviychuk V, Wawrzyniak L, Guo Y R, Lu M, Storey K, Macklin M, et al. Isaac gym: High performance GPU based physics simulation for robot learning. In: Proceedings of the 1st Neural Information Processing Systems Track on Datasets and Benchmarks. 2021.Makoviychuk V, Wawrzyniak L, Guo Y R, Lu M, Storey K, Macklin M, et al. Isaac gym: High performance GPU based physics simulation for robot learning. In: Proceedings of the 1st Neural Information Processing Systems Track on Datasets and Benchmarks. 2021. [137] Wang L R, Ling Y Y, Yuan Z C, Shridhar M, Bao C, Qin Y Z, et al. GenSim: Generating robotic simulation tasks via large language models. In: Proceedings of the 12th International Conference on Learning Representations. Vienna, Austria: OpenReview.net, 2024. [138] Chi C, Xu Z J, Feng S Y, Cousineau E, Du Y L, Burchfiel B, et al. Diffusion policy: Visuomotor policy learning via action diffusion. arXiv preprint arXiv: 2303.04137, 2024. [139] Zhou Z X, Ning X F, Hong K, Fu T Y, Xu J M, Li S Y, et al. A survey on efficient inference for large language models. arXiv preprint arXiv: 2404.14294, 2024.Zhou Z X, Ning X F, Hong K, Fu T Y, Xu J M, Li S Y, et al. A survey on efficient inference for large language models. arXiv preprint arXiv: 2404.14294, 2024. [140] Ahn M, Dwibedi D, Finn C, Arenas M G, Gopalakrishnan K, Hausman K, et al. AutoRT: Embodied foundation models for large scale orchestration of robotic agents. arXiv preprint arXiv: 2401.12963, 2024.Ahn M, Dwibedi D, Finn C, Arenas M G, Gopalakrishnan K, Hausman K, et al. AutoRT: Embodied foundation models for large scale orchestration of robotic agents. arXiv preprint arXiv: 2401.12963, 2024. -

 下载:
下载:


图(6)
计量
- 文章访问数: 10834
- HTML全文浏览量: 5763
- PDF下载量: 3430
- 被引次数: 0
