

Finite-time Formation of Large-scale Multi-agent Systems Based on an ODE-PDE Approach
-
摘要: 现有基于偏微分方程(Partial differential equation, PDE)的多智能体系统(Multi-agent system, MAS)编队控制方法要求智能体必须是密集分布的, 为打破这一限制, 提出一种新的基于常微分−偏微分方程(Ordinary differential equation-partial differential equation, ODE-PDE)的分析方法, 以解决稀疏−密集混合分布的大规模异构MAS编队问题. 首先, 通过设计特定的通信协议, 并基于空间离散系统部分连续化方法, 将原始大量的异构MAS的ODE动力学模型转化为由一个PDE 和少数几个ODE耦合而成的ODE-PDE 模型. 为更符合实际复杂场景, 将拓扑权值规定为半马尔科夫切换的, 且稀疏分布和密集分布智能体遵循不一致的切换规则. 其次, 针对无时滞和有时滞两种情形, 设计两种异步边界控制策略, 利用Lyapunov方法得到保证误差系统实际有限时间稳定的充分条件, 并得到停息时间和稳定阈值的计算规则. 最后, 两个广义的数值仿真进一步验证了所提方法的有效性.
-
关键词:
- 大规模异构多智能体系统 /
- 常微分−偏微分方程 /
- 实际有限时间编队 /
- 半马尔科夫切换拓扑 /
- 异步边界控制
Abstract: The existing formation control methods of multi-agent systems (MASs) based on partial differential equation (PDE) require that agents must be densely distributed. To break this limitation, this paper proposes a novel analysis method based on ordinary differential equation-partial differential equation (ODE-PDE), such that the formation problem of large-scale heterogeneous MASs with sparse and dense mixed distribution could be solved. First, the original numerous heterogeneous ODE dynamics models of MASs are transformed into an ODE-PDE model consisting of a PDE coupled to several ODEs through specific communication protocol design and partial continuum method of spatial discrete systems. To match realistic complex scenes better, the topological weights are designed to be semi-Markov switched, and the switching rules followed by sparsely and densely distributed agents are inconsistent. Second, two asynchronous boundary control strategies are designed for delay-free and time-delayed cases, respectively. The Lyapunov method is used to obtain sufficient conditions to ensure the practically finite-time stability of the error system, and the calculation rules of the settling time and stability threshold are provided. Finally, two generalized numerical simulations further verify the effectiveness of the proposed approach. -
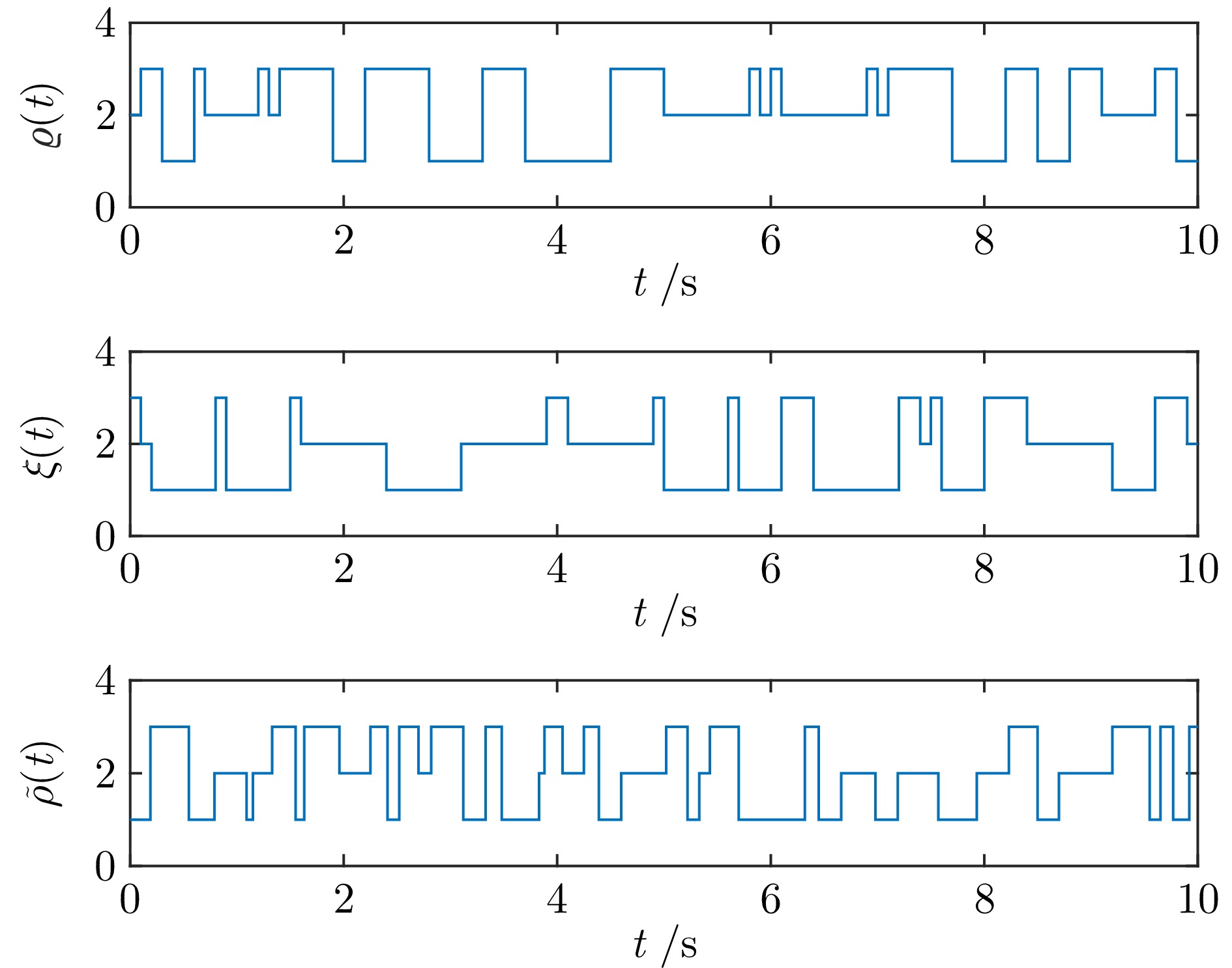
图 1 $\varrho(t)$, $\xi(t)$, $\tilde{\rho}(t)$的模态切换规则
Fig. 1 Mode switching rules of $\varrho(t)$, $\xi(t)$, and $\tilde{\rho}(t)$
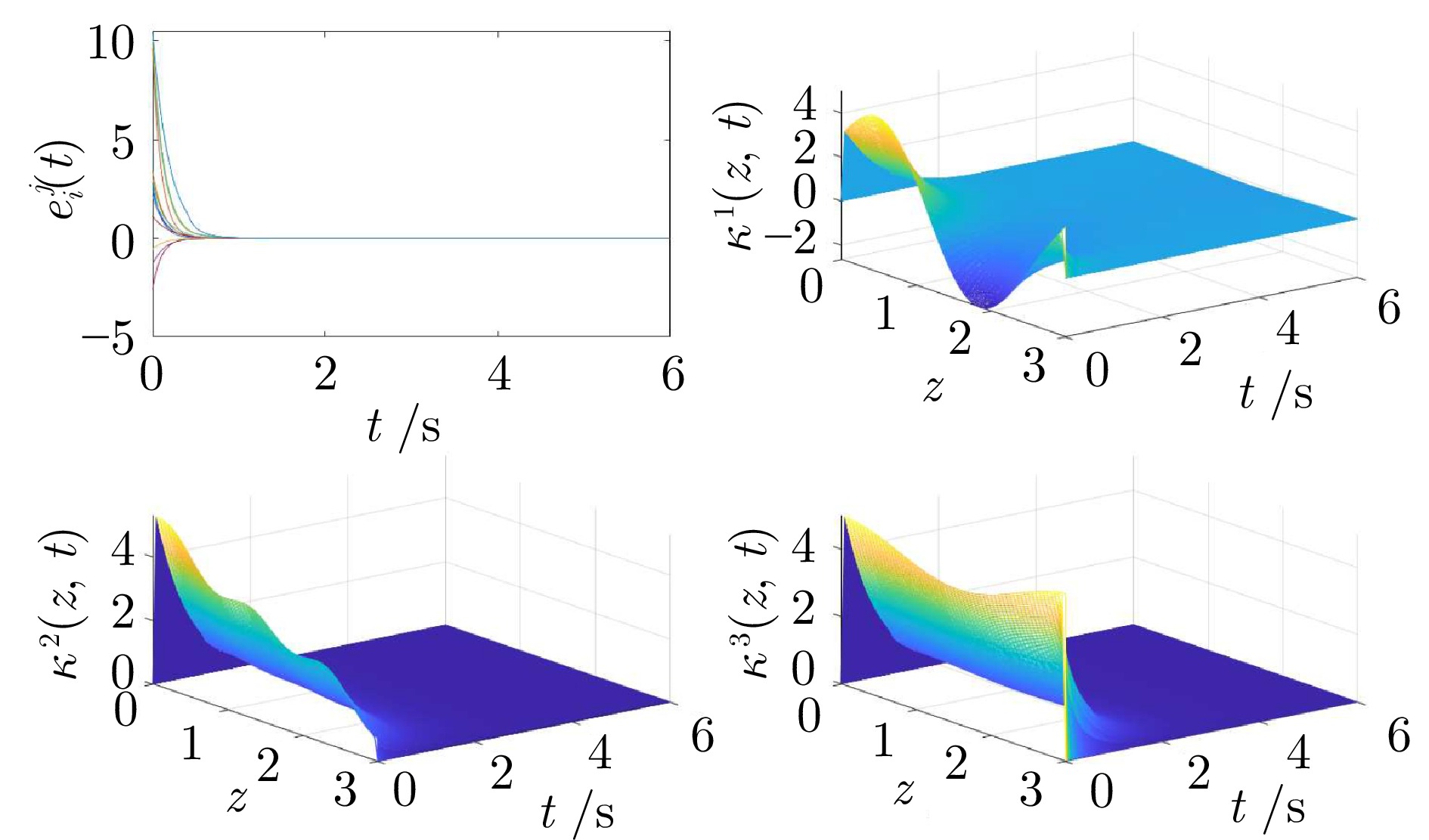
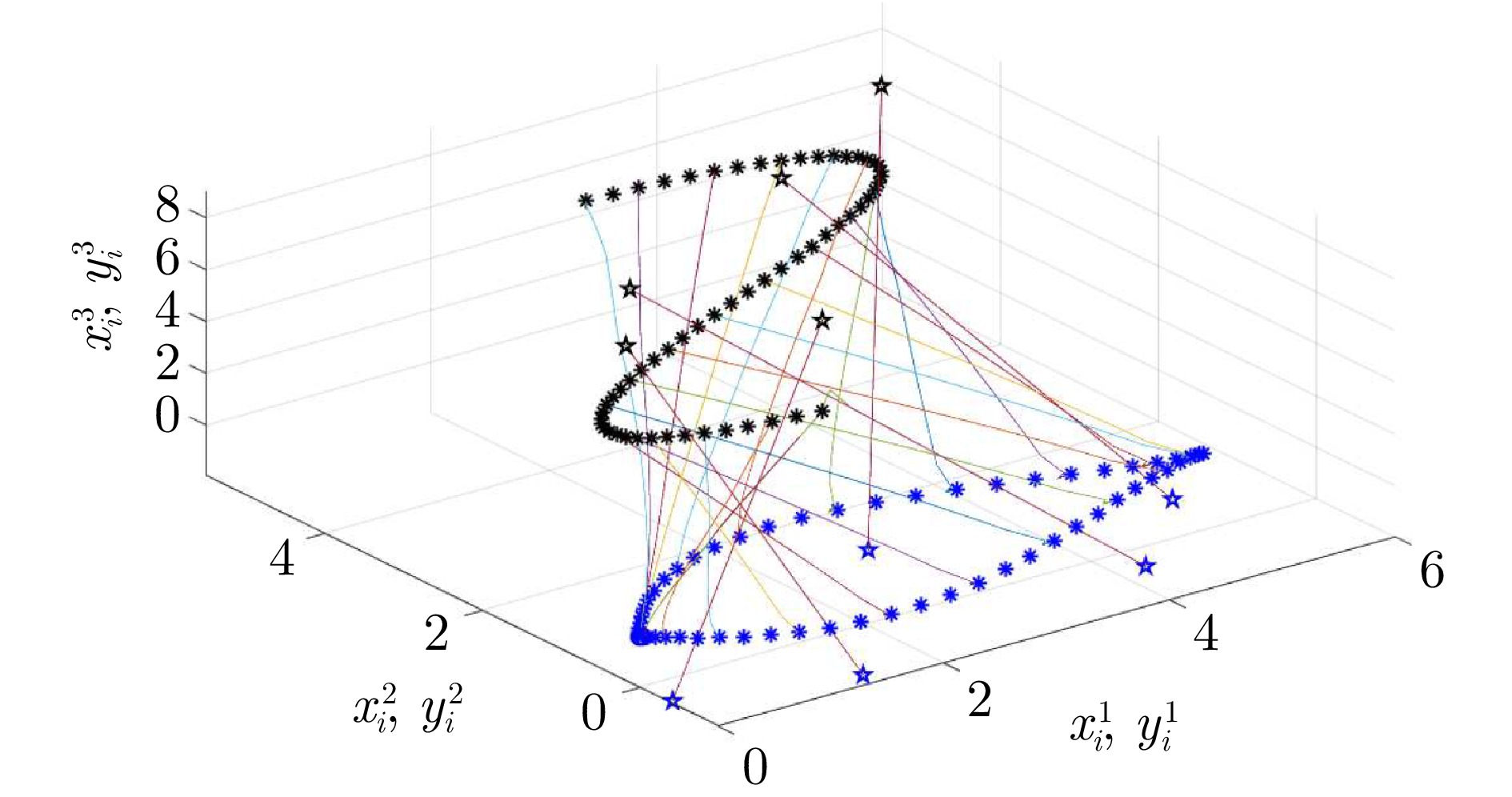
图 3 无时滞情形下单一空间维度上跟踪误差的状态轨迹
Fig. 3 State trajectories of tracking errors along a single spacial dimension in delay-free case
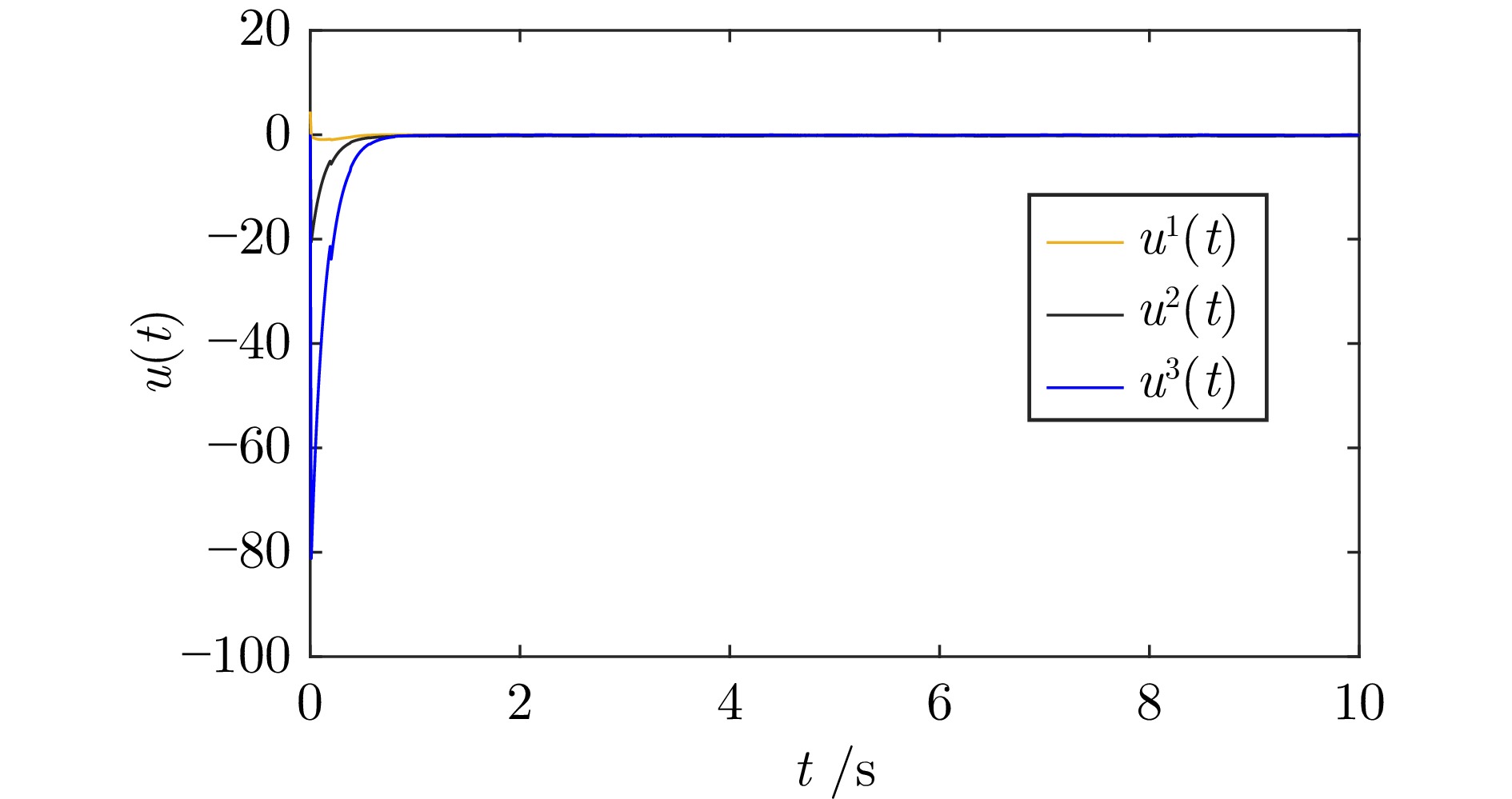
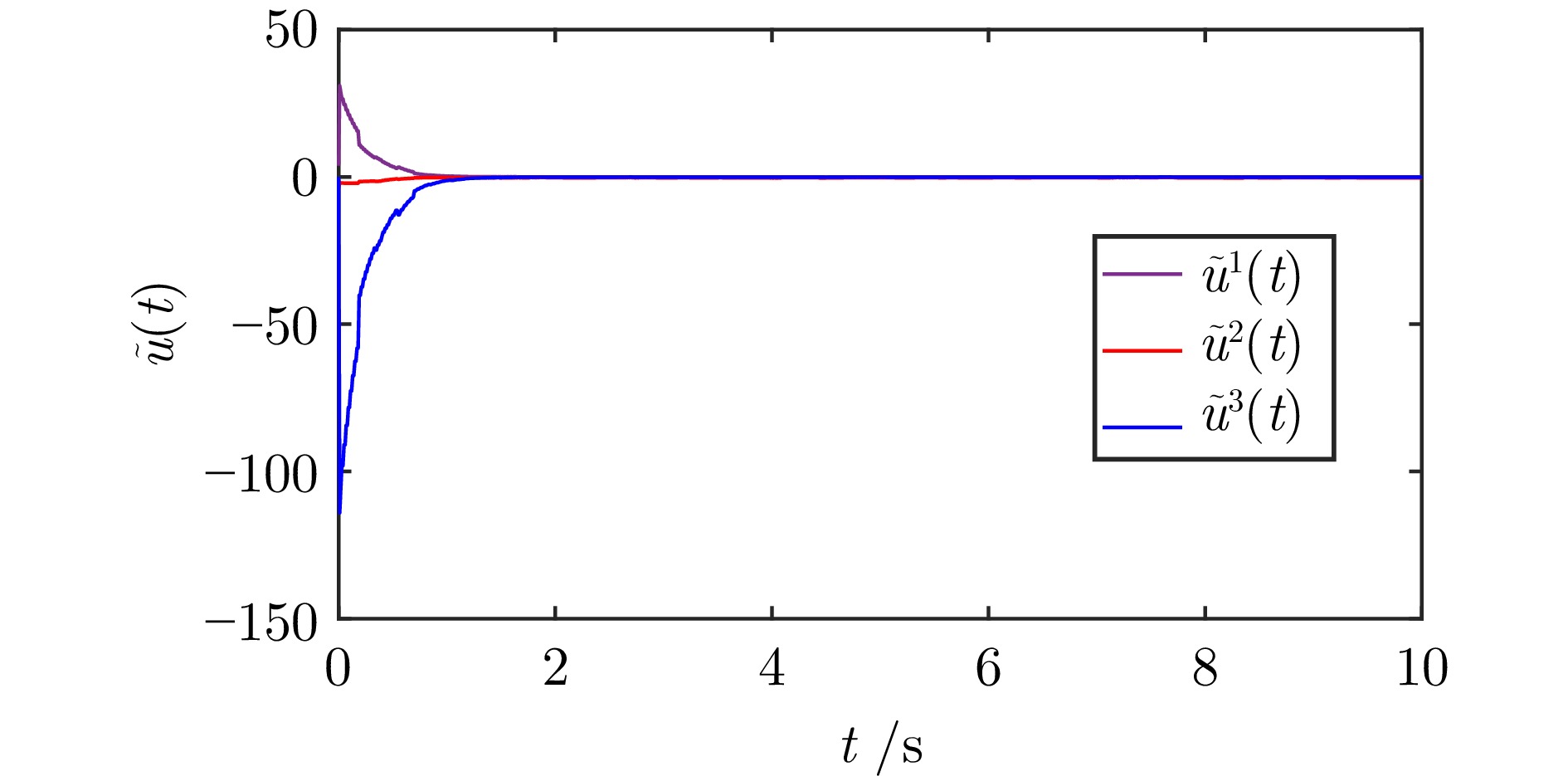
图 4 无时滞情形下控制器(11)的状态轨迹
Fig. 4 State trajectories of controller (11) in delay-free case
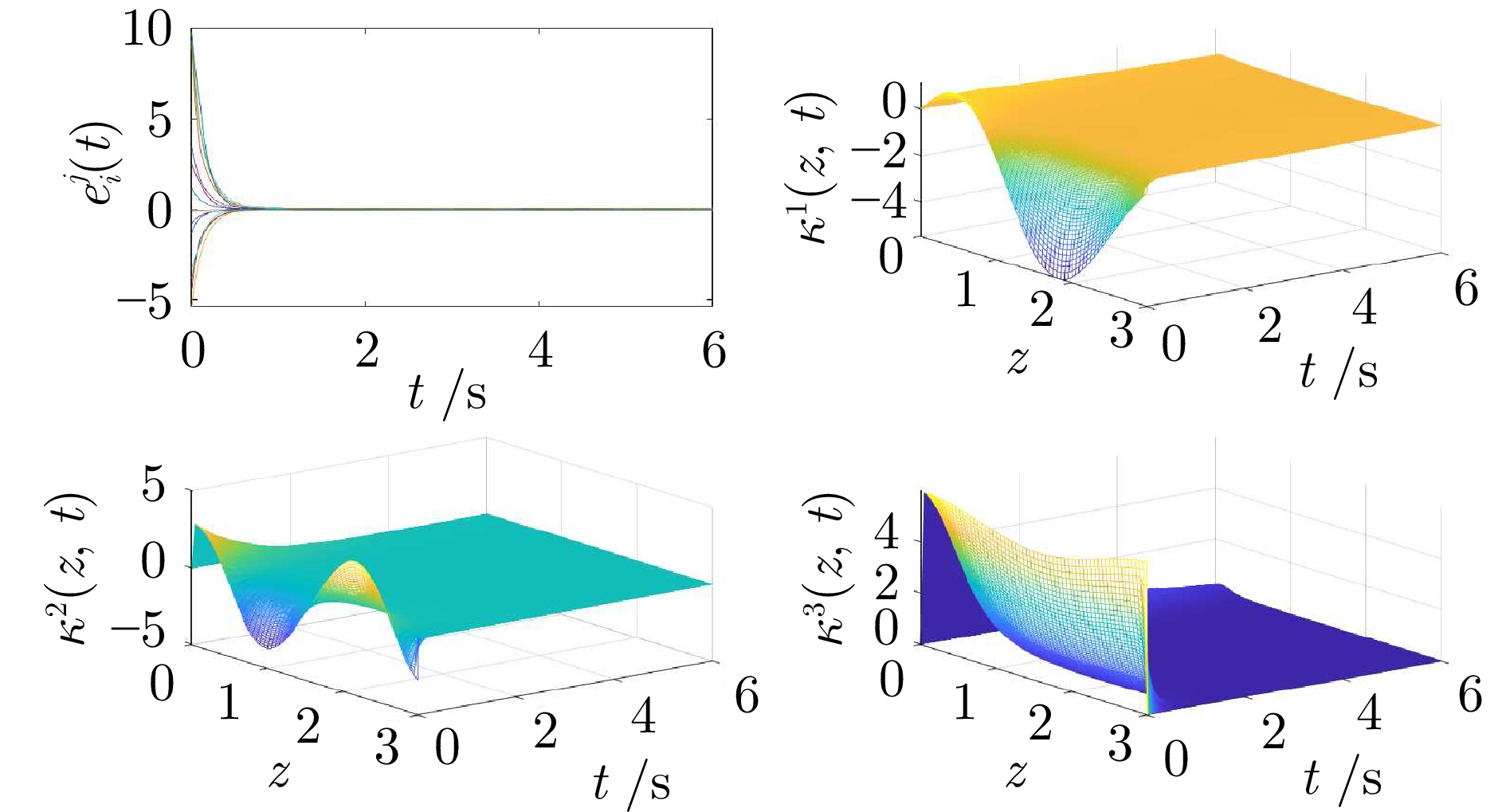
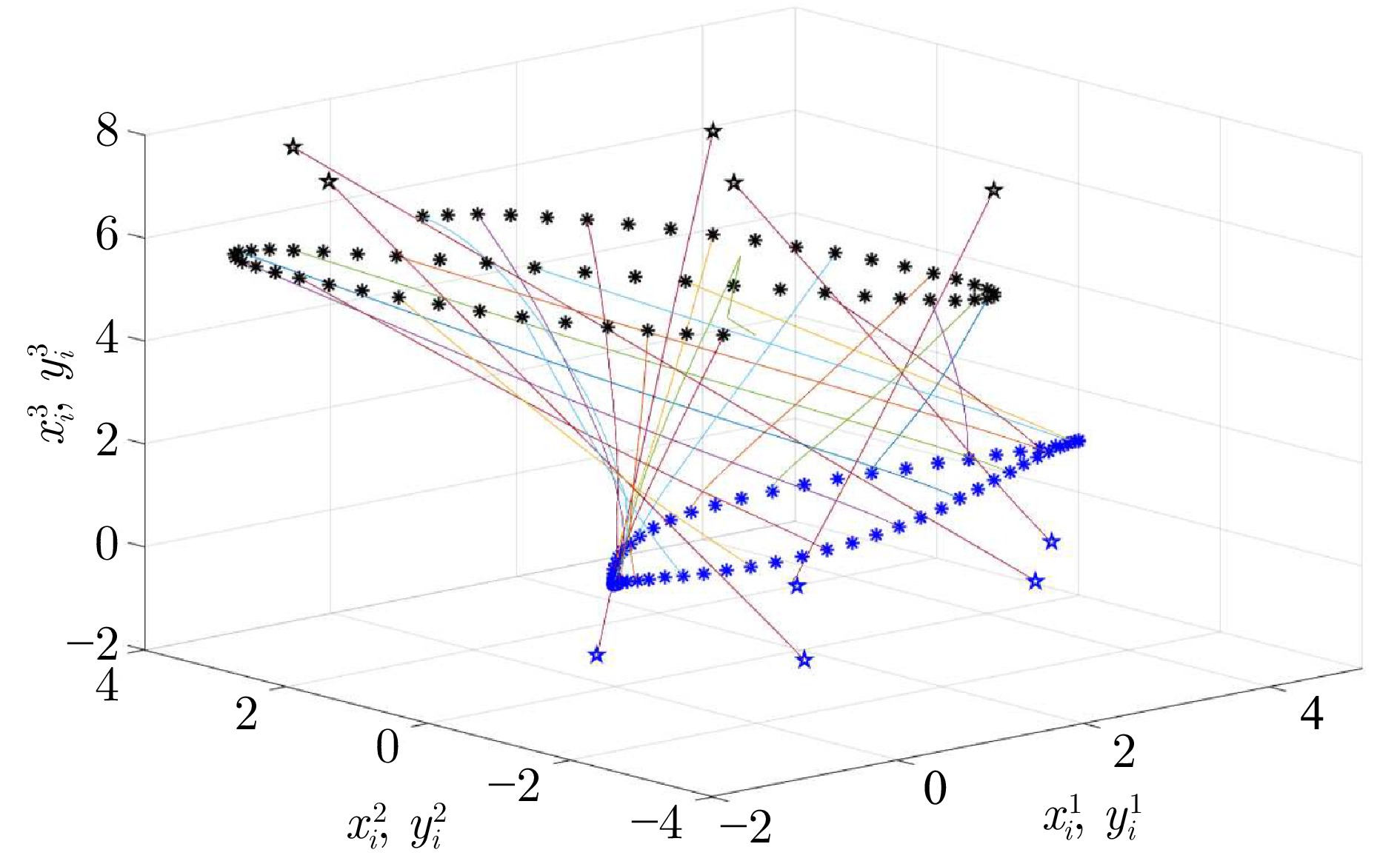
图 6 有时滞情形下单一空间维度上跟踪误差的状态轨迹
Fig. 6 State trajectories of tracking errors along a single spacial dimension in time-delayed case
-
[1] Oh K K, Park M C, Ahn H S. A survey of multi-agent formation control. Automatica, 2015, 53 (C): 424−440 doi: 10.1016/j.automatica.2014.10.022 [2] Qin D D, Jin Z H, Liu A D, Zhang W A, Yu L. Event-triggered distributed predictive cooperation control for multi-agent systems subject to bounded disturbances. Automatica, 2023, 157: Article No. 111230 doi: 10.1016/j.automatica.2023.111230 [3] 范泉涌, 张乃宗, 唐勇, 许斌. 基于动态事件触发通信协议的多智能体系统自适应可靠控制. 自动化学报, 2024, 50(5): 924−936Fan Quan-Yong, Zhang Nai-Zong, Tang Yong, Xu Bin. Adaptive reliable control of multi-agent systems based on dynamic event-triggered communication protocol. Acta Automatica Sinica, 2024, 50(5): 924−936 [4] Ferrari-Trecate G, Buffa A, Gati M. Analysis of coordination in multi-agent systems through partial difference equations. IEEE Transactions on Automatic Control, 2006, 51(6): 1058−1063 doi: 10.1109/TAC.2006.876805 [5] Freudenthaler G, Meurer T. PDE-based multi-agent formation control using flatness and backstepping: Analysis, design and robot experiments. Automatica, 2020, 115: Article No. 108897 doi: 10.1016/j.automatica.2020.108897 [6] Wei J Q, Fridman E, Johansson K H. A PDE approach to deployment of mobile agents under leader relative position measurements. Automatica, 2019, 106: 47−53 doi: 10.1016/j.automatica.2019.04.040 [7] Su H S, Xu Q J. Deployment of second-order networked mobile agents over a smooth curve. Automatica, 2022, 146: Article No. 110645 doi: 10.1016/j.automatica.2022.110645 [8] Terushkin M, Fridman E. Network-based deployment of nonlinear multi agents over open curves: A PDE approach. Automatica, 2021, 129: Article No. 109697 doi: 10.1016/j.automatica.2021.109697 [9] Qi J, Wang S S, Fang J A, Diagne M. Control of multi-agent systems with input delay via PDE-based method. Automatica, 2019, 106: 91−100 doi: 10.1016/j.automatica.2019.04.032 [10] Wang S S, Diagne M, Qi J. Delay-adaptive compensation for 3-D formation control of leader-actuated multi-agent systems. Automatica, 2024, 164: Article No. 111645 doi: 10.1016/j.automatica.2024.111645 [11] 刘凡, 杨洪勇, 杨怡泽, 李玉玲, 刘远山. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(4): 749−758Liu Fan, Yang Hong-Yong, Yang Yi-Ze, Li Yu-Ling, Liu Yuan-Shan. Finite-time integral sliding-mode control for multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(4): 749−758 [12] Meurer T, Krstic M. Finite-time multi-agent deployment: A nonlinear PDE motion planning approach. Automatica, 2011, 47(11): 2534−42 doi: 10.1016/j.automatica.2011.08.045 [13] Man J T, Sheng Y, Chen C Y, Zeng Z G. PDE-based finite-time deployment of heterogeneous multi-agent systems subject to multiple asynchronous semi-Markov chains. IEEE Transactions on Circuits and Systems I: Regular Papers, 2023, 71(2): 885−897 [14] 孙梦薇, 任璐, 刘剑, 孙长银. 切换拓扑下动态事件触发多智能体系统固定时间一致性. 自动化学报, 2023, 49(6): 1295−1305Sun Meng-Wei, Ren Lu, Liu Jian, Sun Chang-Yin. Dynamic event-triggered fixed-time consensus control of multi-agent systems under switching topologies. Acta Automatica Sinica, 2023, 49(6): 1295−1305 [15] Wang F Y, Gong J Y, Liu Z X, Chen Z Q. Finite-time output tracking control for random multi-agent systems with mismatched disturbances. IEEE Transactions on Automation Science and Engineering, 2024, 21(4): 7516−7526 [16] Liu X D, Deng F Q, Wei W, Wan F Z. Formation tracking control of networked systems with time-varying delays and sampling under fixed and Markovian switching topology. IEEE Transactions on Control of Network Systems, 2022, 9(2): 601−612 doi: 10.1109/TCNS.2022.3158817 [17] Li B Q, Wen G G, Peng Z X, Huang T W, Rahmani A. Fully distributed consensus tracking of stochastic nonlinear multiagent systems with Markovian switching topologies via intermittent control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 52(5): 3200−3209 [18] 郑维, 张志明, 刘和鑫, 张明泉, 孙富春. 基于线性变换的领导−跟随多智能体系统动态反馈均方一致性控制. 自动化学报, 2022, 48(10): 2474−2485Zheng Wei, Zhang Zhi-Ming, Liu He-Xin, Zhang Ming-Quan, Sun Fu-Chun. Dynamic feedback mean square consensus control based on linear transformation for leader-follower multi-agent systems. Acta Automatica Sinica, 2022, 48(10): 2474−2485 [19] Liang H J, Zhang L C, Sun Y H, Huang T W. Containment control of semi-Markovian multiagent systems with switching topologies. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 51(6): 3889−3899 [20] Hu Z H, Mu X W. Impulsive consensus of stochastic multi-agent systems under semi-Markovian switching topologies and application. Automatica, 2023, 150: Article No. 110871 doi: 10.1016/j.automatica.2023.110871 [21] Stone L D. Necessary and sufficient conditions for optimal control of semi-Markov jump processes. SIAM Journal on Control, 1973, 11(2): 187−201 doi: 10.1137/0311017 [22] Zhu Z, Xia Y Q, Fu M Y. Attitude stabilization of rigid spacecraft with finite-time convergence. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686−702 doi: 10.1002/rnc.1624 [23] Tao Y Y, Che W W, Wu Z G, Xu Y, Dong S L. Asynchronous control of 2-D Markov jump Roesser systems with nonideal transition probabilities. IEEE Transactions on Cybernetics, 2024, 54(11): 6643−6652 [24] Wang L K, Zhao Y H, Xie X P, Lam H K. A switching asynchronous control approach for Takagi-Sugeno fuzzy Markov jump systems with time-varying delay. IEEE Transactions on Fuzzy Systems, 2024, 32(2): 595−606 doi: 10.1109/TFUZZ.2023.3302134 [25] Tao J, Wu Z Y, Xiao Z H, Rao H X, Xu Y, Shi P. Synchronization of Markov jump neural networks with communication constraints via asynchronous output feedback control. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(11): 15724−15734 [26] Hardy G H, Littlewood J E, Pólya G. Inequalities. Cambridge University Press, 1952. [27] Wang F, Chen B, Sun Y M, Gao Y L, Lin C. Finite-time fuzzy control of stochastic nonlinear systems. IEEE Transactions on Cybernetics, 2019, 50(6): 2617−2626 [28] Wei Y L, Park J H, Qiu J B, Wu L G, Jung H Y. Sliding mode control for semi-Markovian jump systems via output feedback. Automatica, 2017, 81: 133−141 doi: 10.1016/j.automatica.2017.03.032 -

 下载:
下载:

计量
- 文章访问数: 854
- HTML全文浏览量: 3396
- PDF下载量: 253
- 被引次数: 0
