

Cooperative Control Strategy Research Based on Hybrid Dual-terminal Event-triggered Mechanism
-
摘要: 针对非线性多智能体系统, 提出基于混合双端事件触发机制的模糊跟踪控制策略. 首先, 相比于现存状态触发机制, 构建一种灵活可调的阈值设计方法以满足系统实时性需求; 其次, 改进的状态触发机制将状态估计信号作为触发信号, 可有效降低现存机制的保守性并提高阈值设计的灵活性; 随后, 针对控制器−执行器环节和传感器−控制器环节, 设计混合双端事件触发机制来同时缓解双信道的通讯负担. 此外, 为解决未知不可测状态的问题, 构造一种仅基于相对输出信息的状态观测器. 最后, 在闭环系统内, 所有信号都是半全局一致最终有界稳定的, 并用一个实际的仿真例子证明了提出控制策略的可行性.
-
关键词:
- 混合双端事件触发机制 /
- 改进的状态触发机制 /
- 多智能体系统 /
- 规定性能方法
Abstract: For nonlinear multiagent systems, this paper proposes the fuzzy tracking control strategy based on hybrid dual-terminal event-triggered mechanism. First of all, compared with existing state triggering mechanisms, a flexible and adjustable threshold designing method is constructed, which meets the real-time performance requirements of the system. Moreover, the improved state triggering mechanism considers the estimated state signal as the trigger signal, which effectively reduces the conservatism of existing mechanisms and enhances the flexibility of threshold design. Subsequently, the hybrid dual-terminal event-triggered mechanism is designed for controller to actuator link and sensor to controller link, which releases dual channel communication pressure, simultaneously. Besides, to solve the problem of unknown unmeasurable state, the state observer is constructed, which bases solely on relative output information. Finally, all the signals are semiglobally uniformly ultimately bounded in the closed-loop system, and a practical simulation example demonstrates the feasibility of the proposed control strategy. -
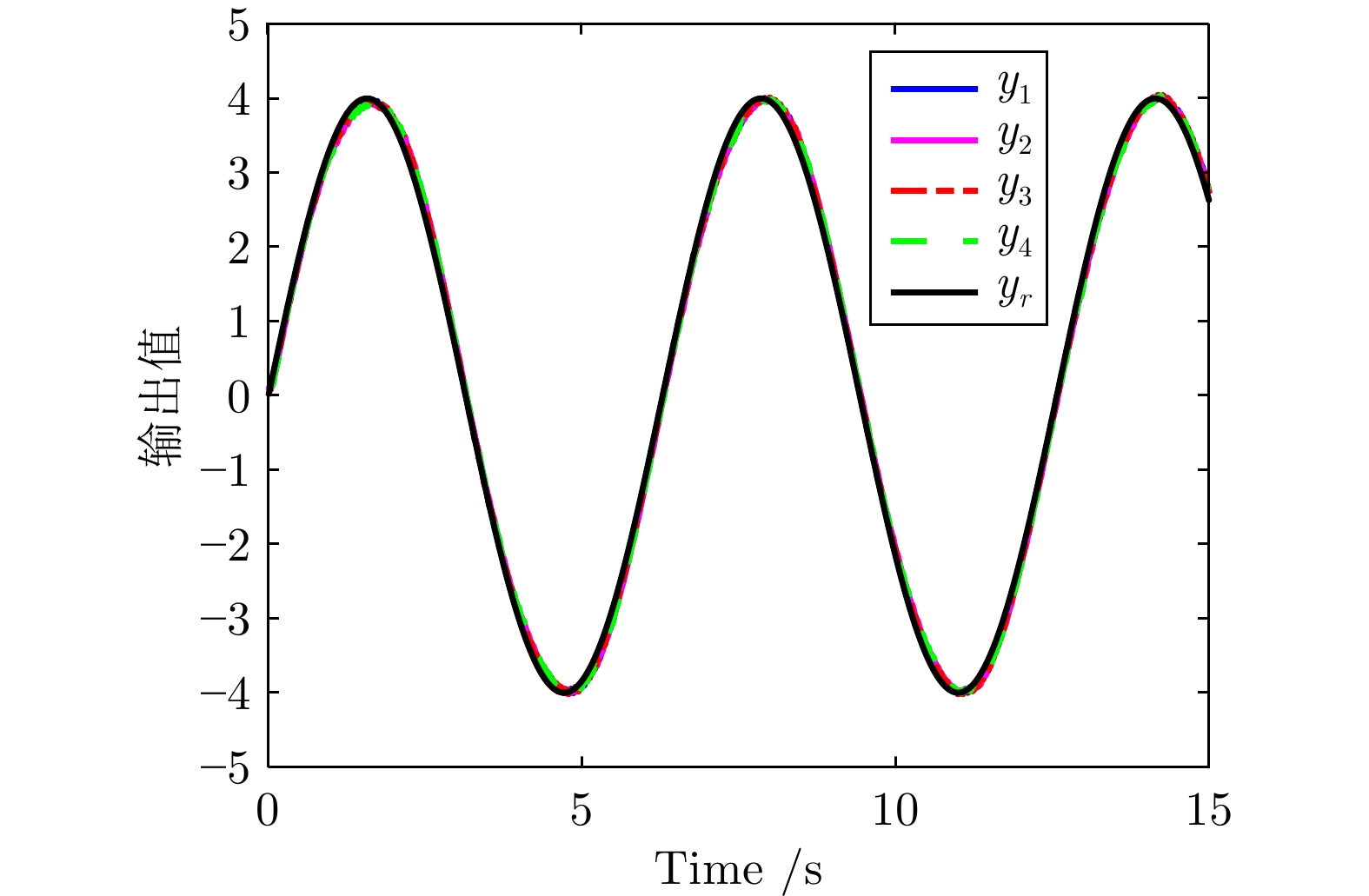
图 2 4个跟随者和1个领导者的输出轨迹
Fig. 2 The output trajectories of the four followers and one leader
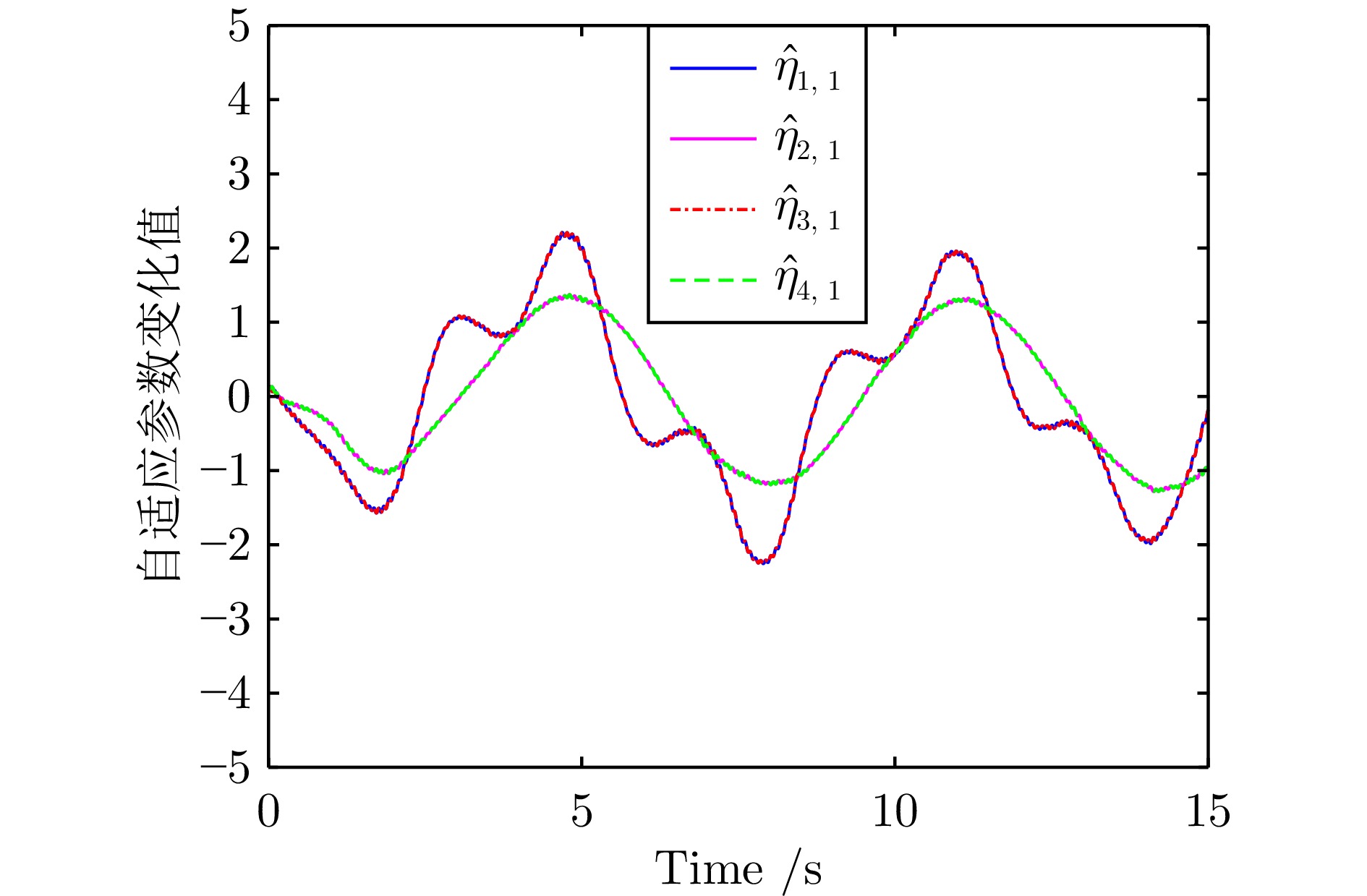
图 5 自适应律参数$\hat{\eta}_{h,\;1}$的轨迹
Fig. 5 The trajectories of the adaptive law parameters $\hat{\eta}_{h,\;1}$
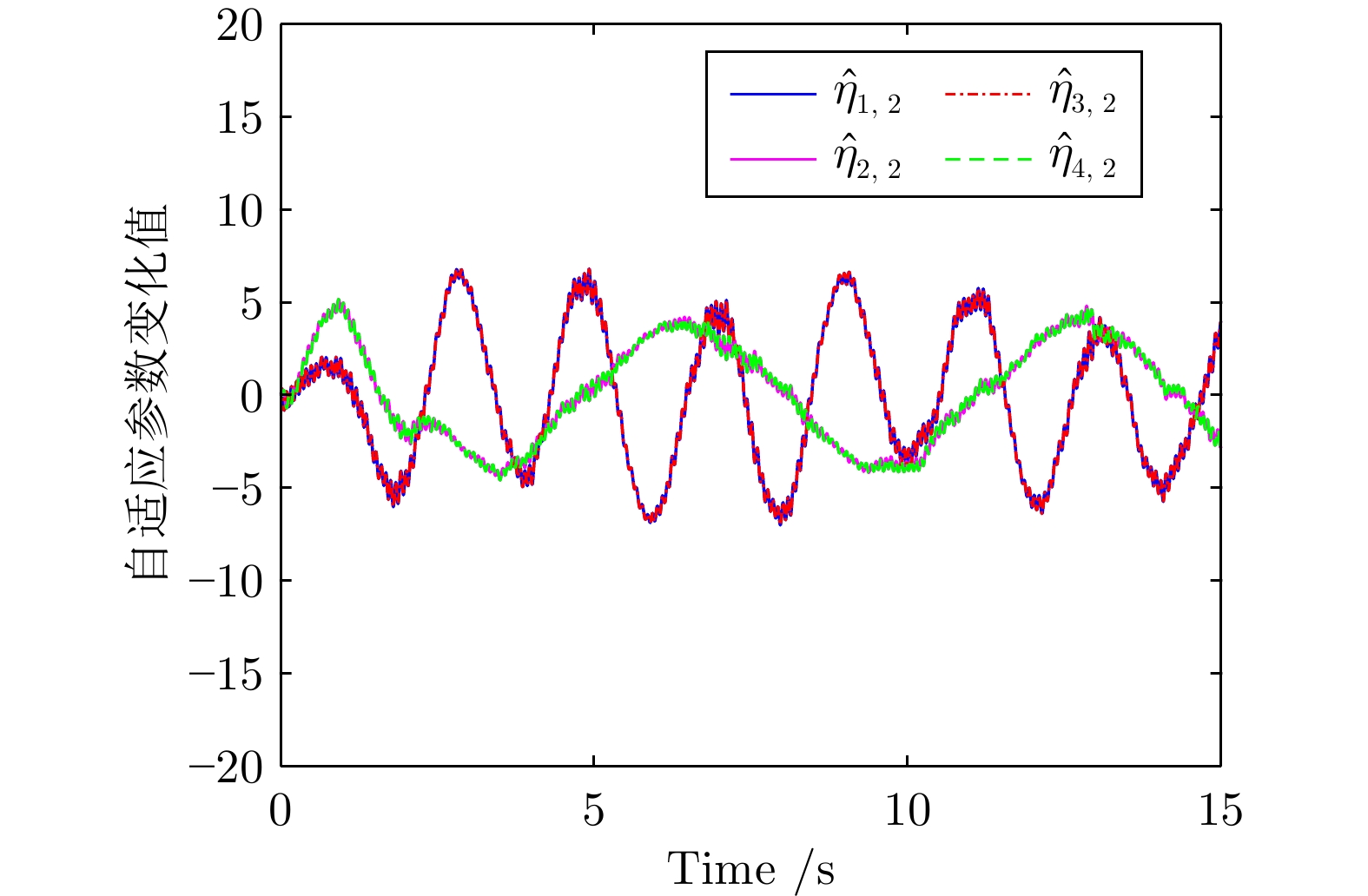
图 6 自适应律参数$\hat{\eta}_{h,\;2}$的轨迹
Fig. 6 The trajectories of the adaptive law parameters $\hat{\eta}_{h,\;2}$
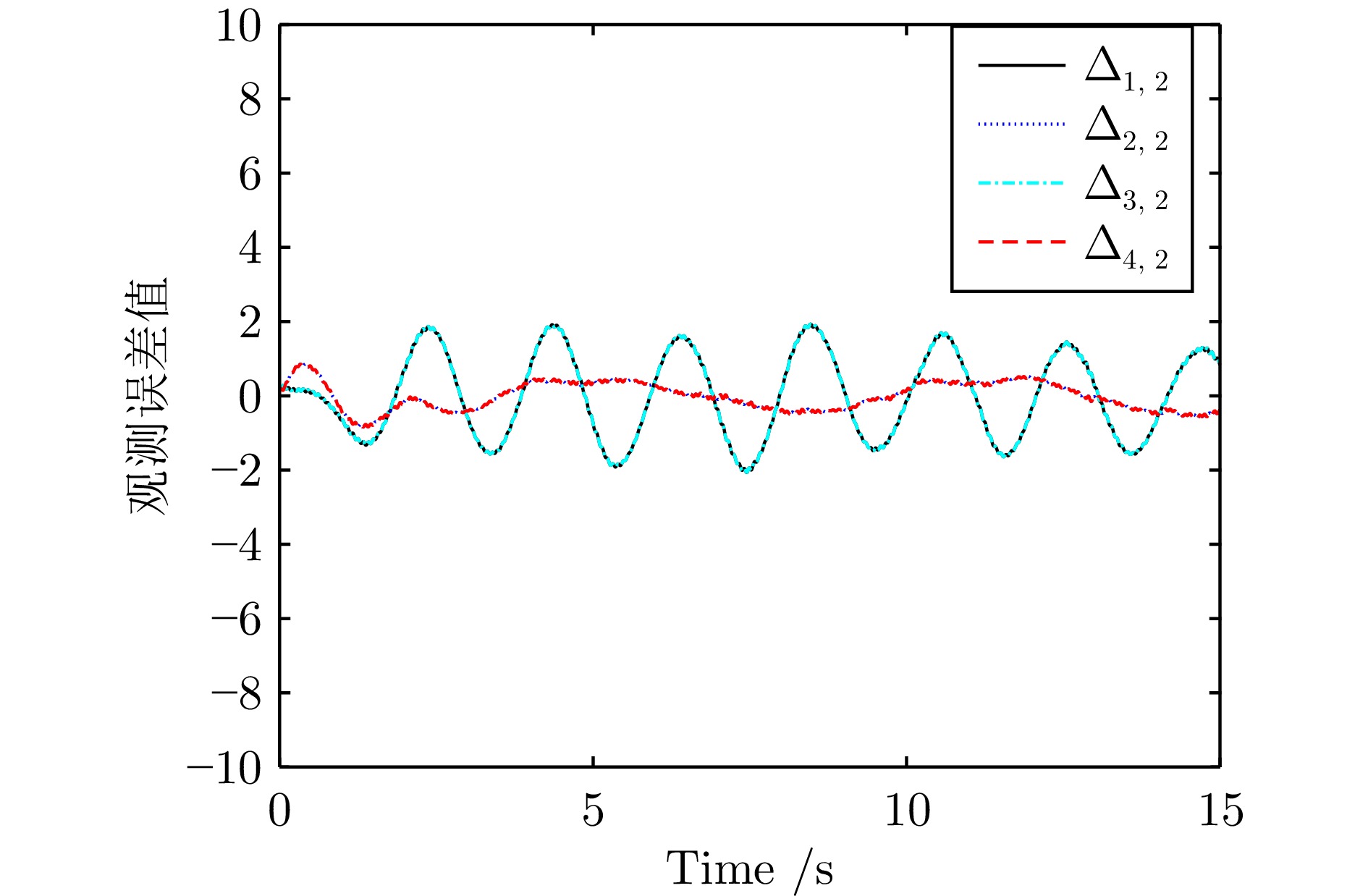
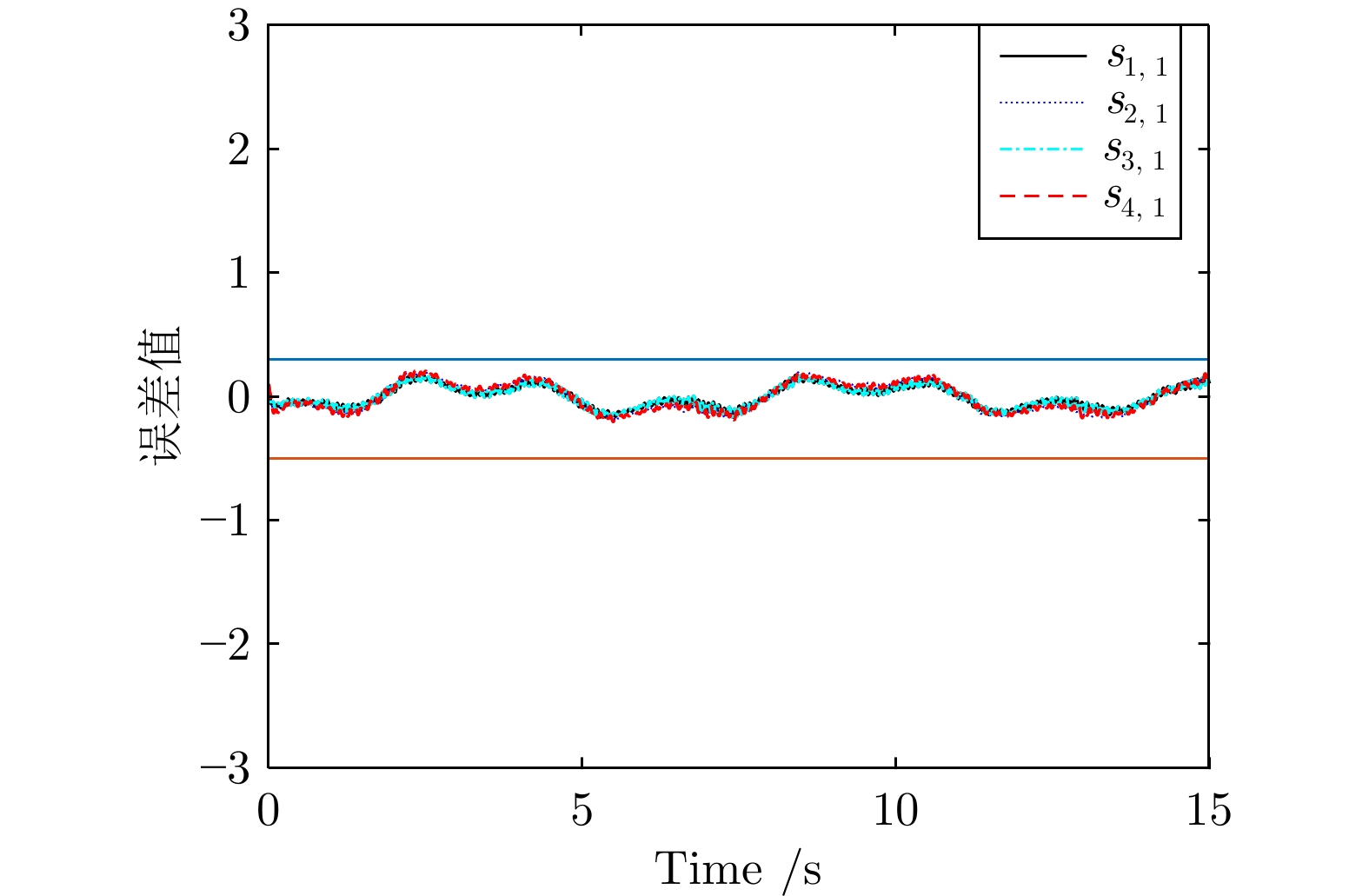
图 7 观测误差$\Delta_{h,\;2} $的变化情况
Fig. 7 The changes in observation errors $\Delta_{h,\;2}$
-
[1] Guo X G, Zhang D Y, Wang J L, Park J H, Guo L. Observer-based event-triggered composite anti-disturbance control for multi-agent systems under multiple disturbances and stochastic FDIAs. IEEE Transactions on Automation Science and Engineering, 2023, 20(1): 528−540 [2] Ren H R, Ma H, Li H Y, Wang Z Y. Adaptive fixed-time control of nonlinear MASs with actuator faults. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1252−1262 [3] Cao L, Pan Y N, Liang H J, Huang T W. Observer-based dynamic event-triggered control for multiagent systems with time-varying delay. IEEE Transactions on Cybernetics, 2023, 53(5): 3376−3387 doi: 10.1109/TCYB.2022.3226873 [4] Lin G H, Li H Y, Ma H, Zhou Q. Distributed containment control for human-in-the-loop MASs with unknown time-varying parameters. IEEE Transactions on Circuits and Systems I: Regular Papers, 2022, 69(12): 5300−5311 [5] Liang H J, Chang Z Y, Ahn C K. Hybrid event-triggered intermittent control for nonlinear multi-agent systems. IEEE Transactions on Network Science and Engineering, 2023, 10(4): 1975−1984 doi: 10.1109/TNSE.2023.3237256 [6] Zheng C B, Pang Z H, Wang J X, Sun J, Liu G P, Han Q L. Null-space-based time-varying formation control of uncertain nonlinear second-order multi-agent systems with collision avoidance. IEEE Transactions on Industrial Electronics, 2023, 70(10): 10476−10485 doi: 10.1109/TIE.2022.3217585 [7] Wei C S, Luo J J, Dai H H, Duan G R. Learning-based adaptive attitude control of spacecraft formation with guaranteed prescribed performance. IEEE Transactions on Cybernetics, 2019, 49(11): 4004−4016 doi: 10.1109/TCYB.2018.2857400 [8] Zuo Z Y, Liu C J, Han Q L, Song J W. Unmanned aerial vehicles: Control methods and future challenges. IEEE/CAA Journal of Automatica Sinica, 2022, 9(4): 601−614 doi: 10.1109/JAS.2022.105410 [9] Heshmati-Alamdari S, Nikou A, Dimarogonas D V. Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments. IEEE Transactions on Automation Science and Engineering, 2021, 18(3): 1288−1301 doi: 10.1109/TASE.2020.3001183 [10] 杨涛, 柴天佑. 分布式协同优化的研究现状与展望. 中国科学: 技术科学, 2020, 50(11): 1414−1425 doi: 10.1360/SST-2020-0040Yang Tao, Chai Tian-You. Research status and prospects of distributed collaborative optimization. SCIENTIA SINICA Technologica, 2020, 50(11): 1414−1425 doi: 10.1360/SST-2020-0040 [11] Liang H J, Chen L, Pan Y N, Lam H K. Fuzzy-based robust precision consensus tracking for uncertain networked systems with cooperative-antagonistic interactions. IEEE Transactions on Fuzzy Systems, 2023, 31(4): 1362−1376 doi: 10.1109/TFUZZ.2022.3200730 [12] Liu G P. Tracking control of multi-agent systems using a networked predictive PID tracking scheme. IEEE/CAA Journal of Automatica Sinica, 2023, 10(1): 216−225 doi: 10.1109/JAS.2023.123030 [13] Liu Z J, Lu Z Q, Zhao Z J, Efe M Ö, Hong K S. Single parameter adaptive neural network control for multi-agent deployment with prescribed tracking performance. Automatica, 2023, 156: Article No. 111207 doi: 10.1016/j.automatica.2023.111207 [14] Ren H R, Cheng Z J, Qin J H, Lu R Q. Deception attacks on event-triggered distributed consensus estimation for nonlinear systems. Automatica, 2023, 154: Article No. 111100 doi: 10.1016/j.automatica.2023.111100 [15] 杨涛, 徐磊, 易新蕾, 张圣军, 陈蕊娟, 李渝哲. 基于事件触发的分布式优化算法. 自动化学报, 2022, 48(1): 133−143Yang Tao, Xu Lei, Yi Xin-Lei, Zhang Sheng-Jun, Chen Rui-Juan, Li Yu-Zhe. Event-triggered distributed optimization algorithms. Acta Automatica Sinica, 2022, 48(1): 133−143 [16] Pan Y N, Wu Y M, Lam H K. Security-based fuzzy control for nonlinear networked control systems with DoS attacks via a resilient event-triggered scheme. IEEE Transactions on Fuzzy Systems, 2022, 30(10): 4359−4368 doi: 10.1109/TFUZZ.2022.3148875 [17] Zong G D, Ren H L. Guaranteed cost finite-time control for semi-Markov jump systems with event-triggered scheme and quantization input. International Journal of Robust and Nonlinear Control, 2019, 29(15): 5251−5273 doi: 10.1002/rnc.4672 [18] Zhang M, Dong S L, Shi P, Chen G R, Guan X H. Distributed observer-based event-triggered load frequency control of multiarea power systems under cyber attacks. IEEE Transactions on Automation Science and Engineering, 2023, 20(4): 2435−2444 [19] Zhang Y H, Sun J, Liang H J, Li H Y. Event-triggered adaptive tracking control for multiagent systems with unknown disturbances. IEEE Transactions on Cybernetics, 2020, 50(3): 890−901 doi: 10.1109/TCYB.2018.2869084 [20] Chen Z Y, Niu B, Zhang L, Zhao J F, Ahmad A M, Alassafi M O. Command filtering-based adaptive neural network control for uncertain switched nonlinear systems using event-triggered communication. International Journal of Robust and Nonlinear Control, 2022, 32(11): 6507−6522 doi: 10.1002/rnc.6154 [21] Li Y X, Yang G H, Tong S C. Fuzzy adaptive distributed event-triggered consensus control of uncertain nonlinear multiagent systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(9): 1777−1786 doi: 10.1109/TSMC.2018.2812216 [22] Li Y M, Min X, Tong S C. Observer-based fuzzy adaptive inverse optimal output feedback control for uncertain nonlinear systems. IEEE Transactions on Fuzzy Systems, 2021, 29(6): 1484−1495 [23] Tong S C, Sun K K, Sui S. Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 569−584 doi: 10.1109/TFUZZ.2017.2686373 [24] Li Y M, Min X, Tong S C. Adaptive fuzzy inverse optimal control for uncertain strict-feedback nonlinear systems. IEEE Transactions on Fuzzy Systems, 2020, 28(10): 2363−2374 doi: 10.1109/TFUZZ.2019.2935693 [25] Hou M Z, Shi W R, Fang L Y, Duan G R. Adaptive dynamic surface control of high-order strict feedback nonlinear systems with parameter estimations. Science China Information Sciences, 2023, 66(5): Article No. 159203 [26] Ren H R, Ma H, Li H Y, Lu R H. A disturbance observer based intelligent control for nonstrict-feedback nonlinear systems. Science China Technological Sciences, 2023, 66: 456−467 doi: 10.1007/s11431-022-2126-7 [27] Sun J Y, Zhang H G, Wang Y C, Sun S X. Fault-tolerant control for stochastic switched IT2 fuzzy uncertain time-delayed nonlinear systems. IEEE Transactions on Cybernetics, 2022, 52(2): 1335−1346 doi: 10.1109/TCYB.2020.2997348 [28] Liu Z C, Huang J S, Wen C Y, Su X J. Distributed control of nonlinear systems with unknown time-varying control coefficients: A novel Nussbaum function approach. IEEE Transactions on Automatic Control, 2023, 68(7): 4191−4203 [29] Liu G D, Sun N, Yang T, Fang Y C. Reinforcement learning-based prescribed performance motion control of pneumatic muscle actuated robotic arms with measurement noises. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(3): 1801−1812 doi: 10.1109/TSMC.2022.3207575 [30] Liang H J, Zhang Y H, Huang T W, Ma H. Prescribed performance cooperative control for multiagent systems with input quantization. IEEE Transactions on Cybernetics, 2020, 50(5): 1810−1819 doi: 10.1109/TCYB.2019.2893645 [31] Yu T, Ma L, Zhang H W. Prescribed performance for bipartite tracking control of nonlinear multiagent systems with hysteresis input uncertainties. IEEE Transactions on Cybernetics, 2019, 49(4): 1327−1338 doi: 10.1109/TCYB.2018.2800297 [32] Zhang H W, Lewis F L, Qu Z H. Lyapunov, adaptive, and optimal design techniques for cooperative systems on directed communication graphs. IEEE Transactions on Industrial Electronics, 2012, 59(7): 3026−3041 [33] Zhang H W, Lewis F L. Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics. Automatica, 2012, 48(7): 1432−1439 doi: 10.1016/j.automatica.2012.05.008 [34] Zhang L L, Che W W, Deng C, Wu Z G. Prescribed performance control for multiagent systems via fuzzy adaptive event-triggered strategy. IEEE Transactions on Fuzzy Systems, 2022, 30(12): 5078−5090 doi: 10.1109/TFUZZ.2022.3165629 -

 下载:
下载:

计量
- 文章访问数: 168
- HTML全文浏览量: 70
- PDF下载量: 55
- 被引次数: 0
