

Development Status and Key Techniques for Cross-domain Swarm of Maritime Unmanned Systems
-
摘要: 随着无人系统技术的快速发展, 海上无人系统跨域集群凭借其诸多优点已成为当前无人系统领域研究热点. 具体来说, 海上无人系统跨域集群是指空中、水面、水下无人平台, 通过跨域任务规划与信息交互实现高效集群协作, 对提升复杂海洋环境下无人平台应对能力至关重要. 目前, 海上无人系统跨域集群理论体系还不完善, 相关研究正面临诸多亟待解决的难题. 为此, 首先梳理跨域集群相关概念及其发展现状, 分析其面临的挑战与关键问题; 进而, 从控制理论和通信技术相结合的角度出发, 简述跨域集群任务规划、组网传输、协同控制等关键技术的研究进展; 最后, 结合实际发展情况和未来发展趋势, 对海上无人系统跨域集群未来值得深入研究的方向进行总结与展望.Abstract: With the rapid development of unmanned system technology, the cross-domain swarm of maritime unmanned systems has become a hot research topic in the field of unmanned systems due to its many advantages. Specifically, the cross-domain swarm of maritime unmanned systems refers to the efficient swarm collaboration of air, water surface and underwater unmanned platforms, by means of the cross-domain task planning and information exchange. It is of great significance to enhance the response capability of unmanned platforms in complex marine environments. At present, the theoretical framework of cross-domain swarm for maritime unmanned systems is not mature. The relevant researches are facing many urgent problems to be solved. For that reason, this paper firstly outlines the concepts and development status of cross-domain swarm, through which the challenges and key issues are analyzed. And then, from the perspective of combining control theory and communication technology, we briefly describe the research progress of key technologies, such as the task planning, network transmission, and collaborative control in cross-domain swarm. Finally, based on the actual development situation and future trends, we summarize and look forward to the future research directions worthy of in-depth study on cross-domain swarm of maritime unmanned systems.
-
Key words:
- Swarm /
- maritime unmanned systems /
- cross-domain /
- collaboration control /
- network transmission
-
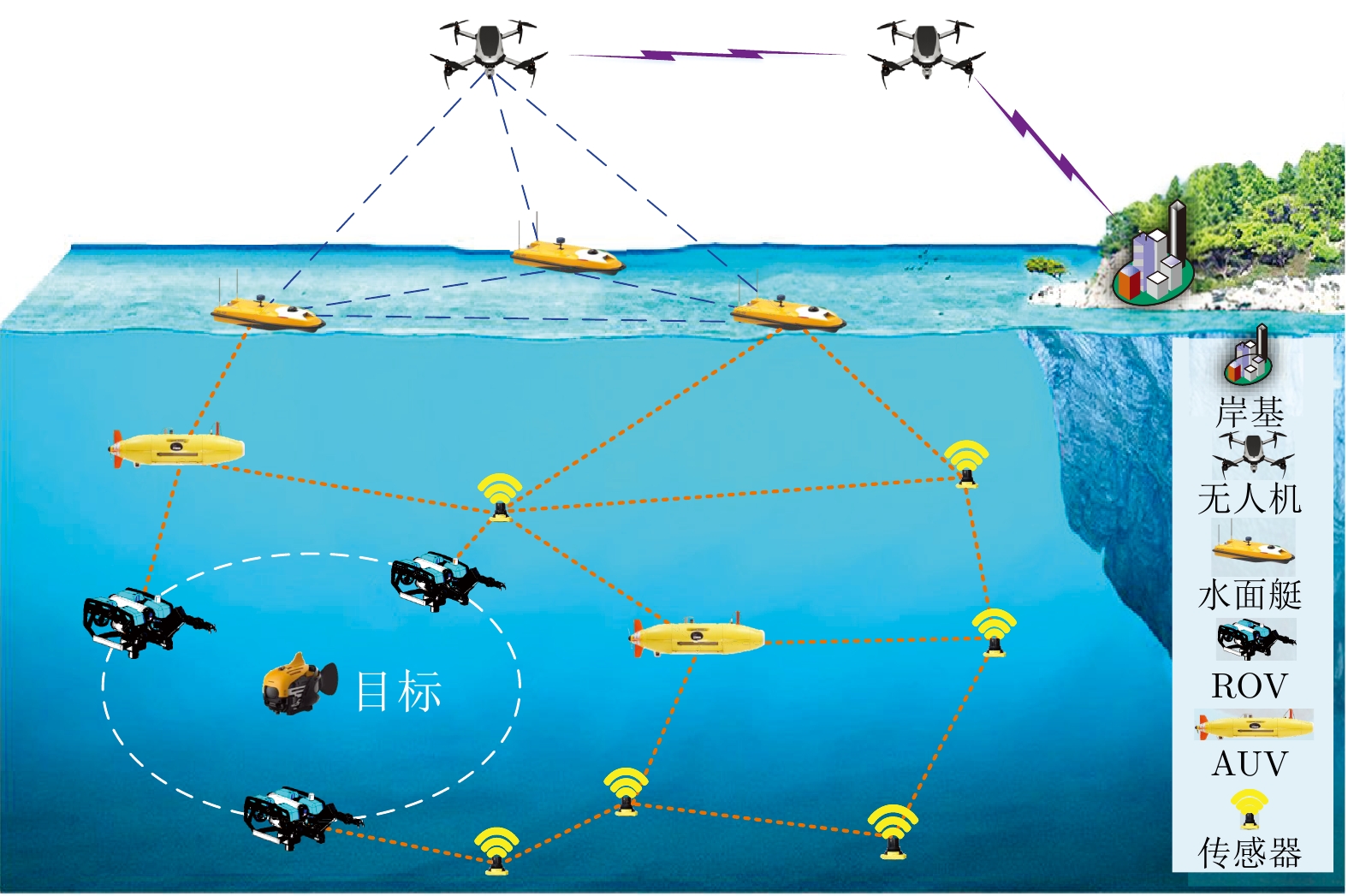
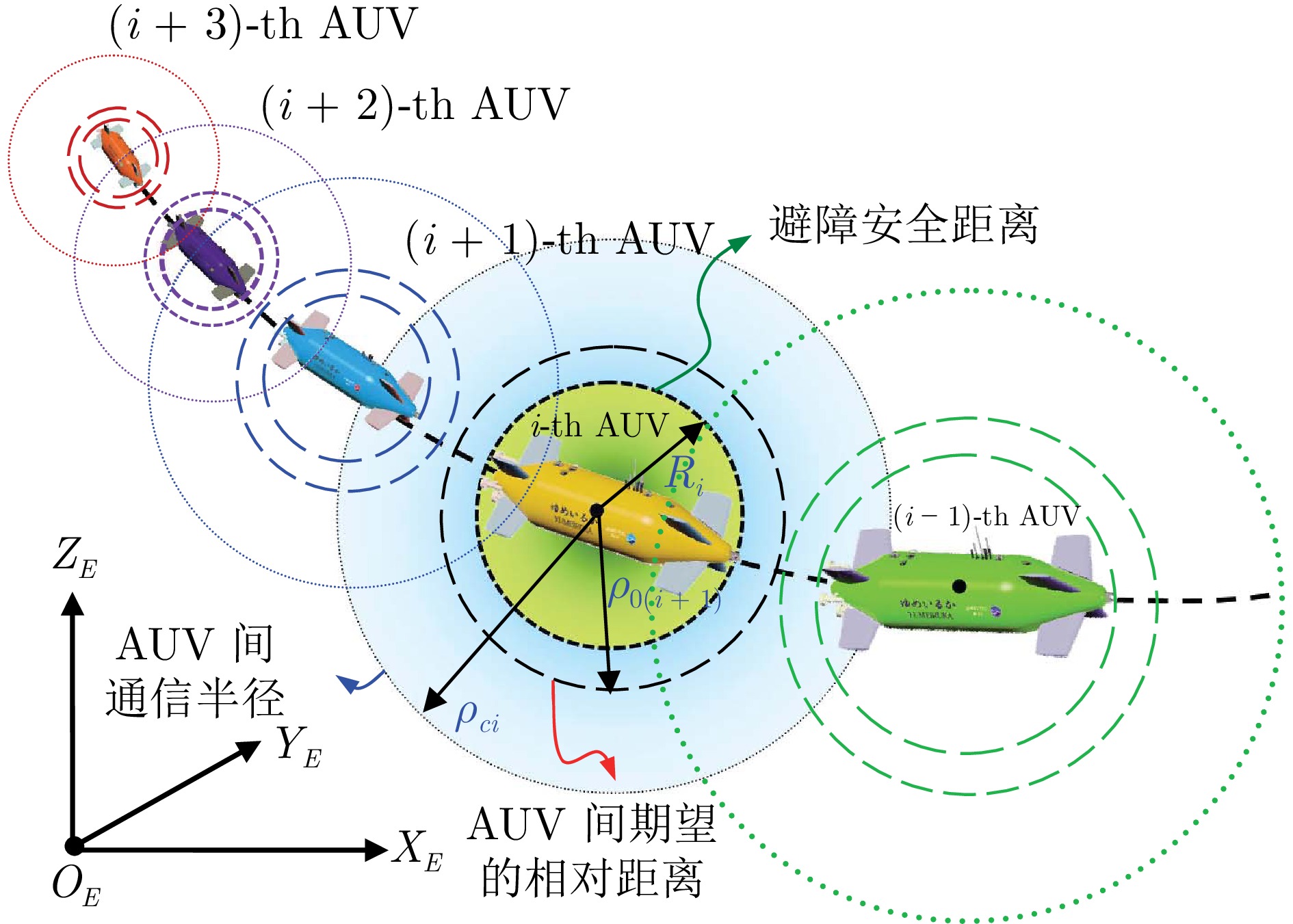
图 1 面向水下移动目标围捕任务的跨域集群系统
Fig. 1 Cross-domain swarm system for the encirclement of underwater mobile target
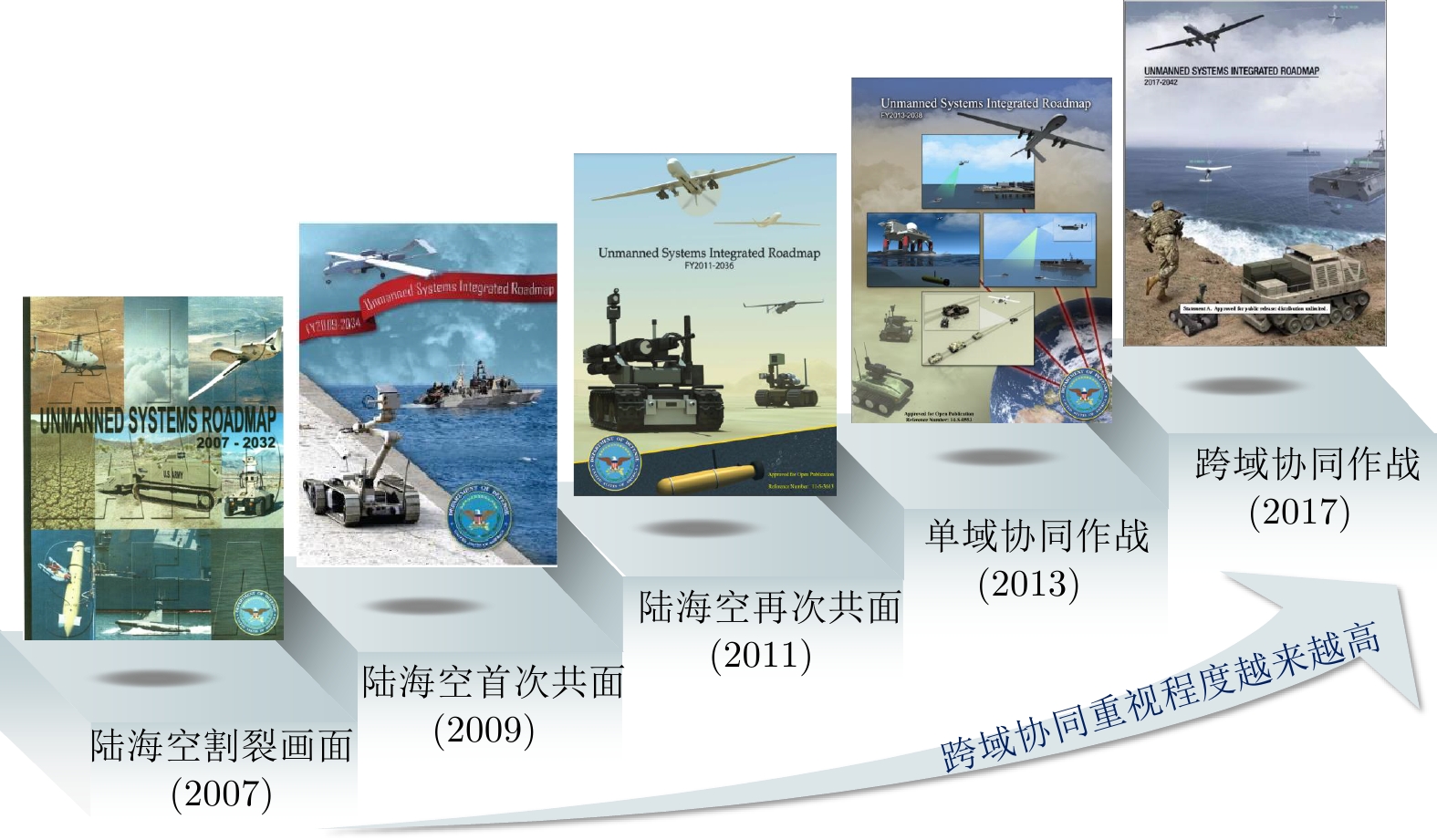
图 2 美国国防部无人系统发展路线图封面
Fig. 2 Covers of the unmanned systems development roadmap for US Department of Defense

图 5 无中继的跨介质通信示意图
Fig. 5 Schematic diagram of the cross-domain communication without the relay nodes
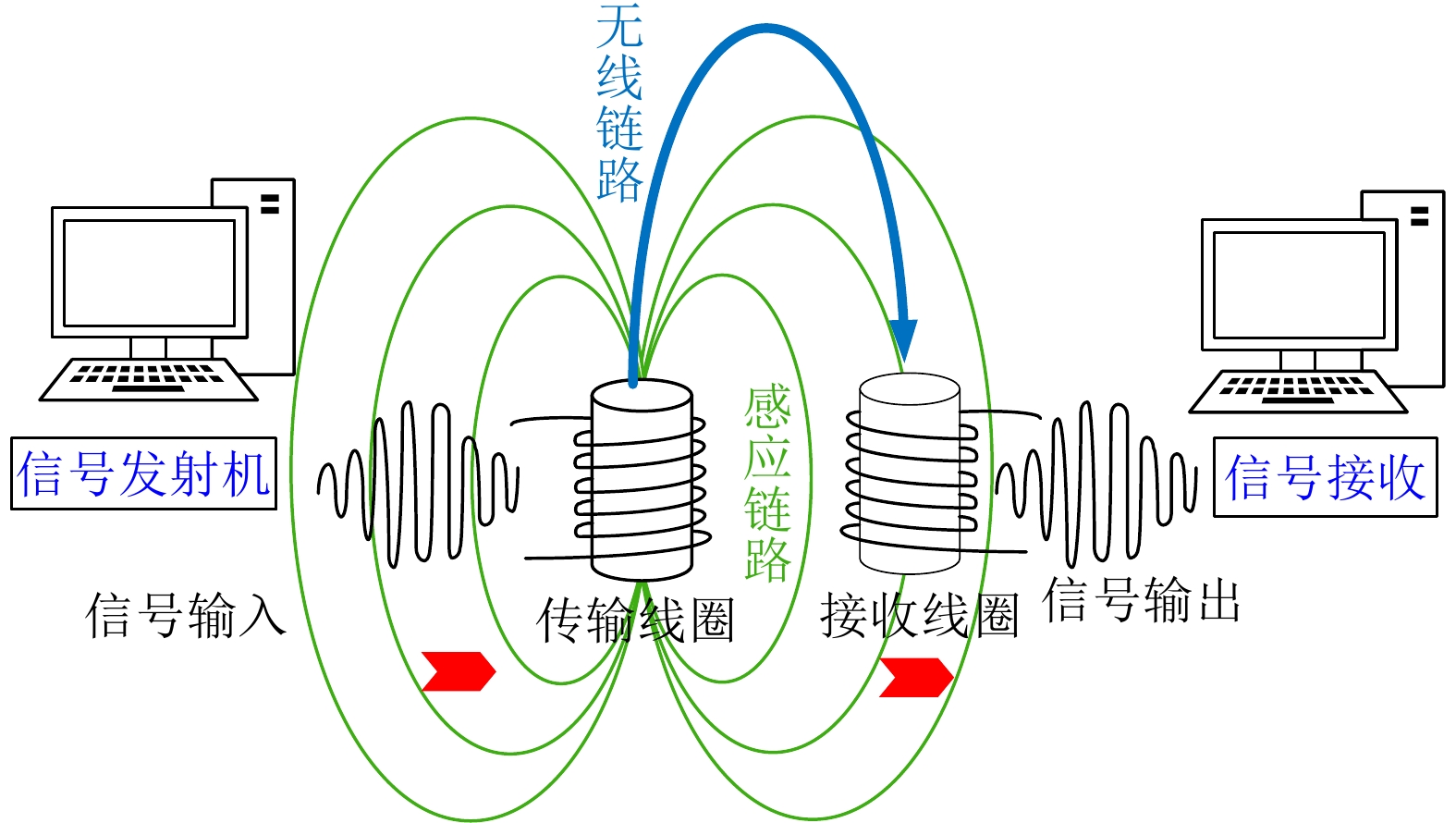
图 6 基于磁感线通信的跨介质数据传输
Fig. 6 Cross-domain data transmission based on the magnetic induction line communication

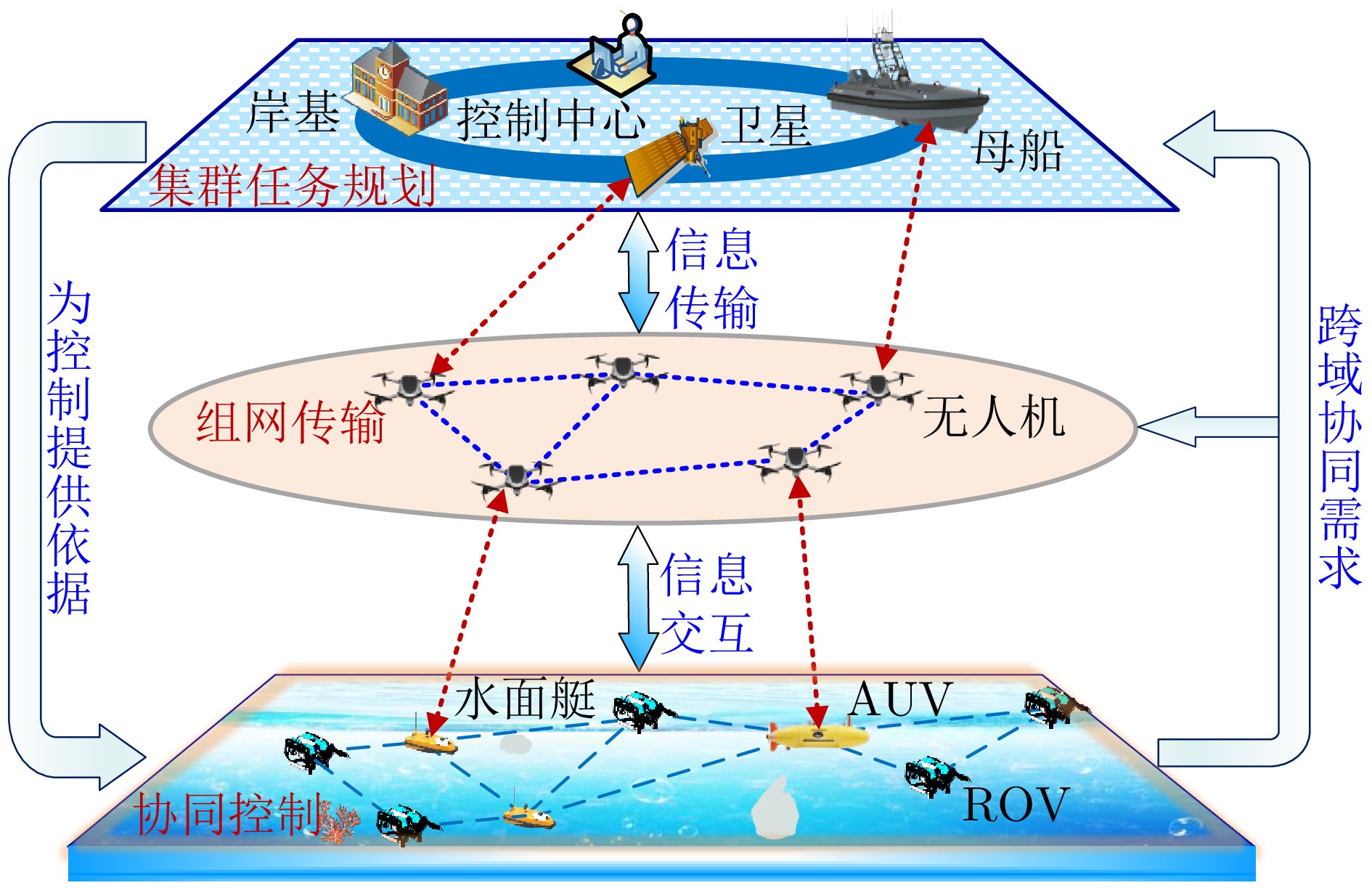
图 7 基于6G技术的“空天地海”一体化跨域中继传输网络
Fig. 7 Air-space-ground-sea integration cross-domain relay transmission network based on 6G technology
表 1 跨域集群相关的综述论文对比
Table 1 Comparison of the survey papers related to the cross-domain swarm
文献 题目 研究出发层面 主要内容 存在不足 [2] 水下无人系统发展现状及其关键技术 海洋装备 分析集群化的概念, 简述了国内外水下无人装备发展现状, 指出需突破的技术 主要偏重水下单域集群落脚于海洋装备领域 [3] 海上无人系统发展及关键技术研究 海洋装备 从战略规划、装备研发和系统演示等层面分析现状, 凝练挑战与需攻克的技术 偏重战略规划, 并没有对具体技术进行分析归纳 [4] 无人直升机空海潜跨域协同作战体系构建与应用 海洋装备 对无人机空海潜协同作战体系进行综述, 分析了多种无人海洋装备互联互通技术 偏重跨域体系建立与应用介绍, 并没有对其耦合关系进行剖析 [5] Survey of air, sea, and road vehicles research for motion control security 感知 从安全角度对空天地机器人态势感知进行了综述 偏重单体态势感知, 未对跨域集群展开讨论 [6] 水下无人系统集群感知与协同技术进展 感知 从感知与协同层面对水下感知与协同技术进行综述, 并指出集群面临的难点 偏重单域内无人系统的集群, 并没有对跨域集群进行综述 [7] A survey on space-air-ground-sea integrated network security in 6G 通信 从安全角度对空天地海通信进行综述, 并讨论跨层攻击 偏重空天地跨域通信研究, 并未对跨域集群展开论述 [8] 水声通信及网络技术综述 通信 对水声通信路由与跨层设计等进展进行综述, 对未来水声通信技术进行展望 偏重单域内无人系统的通信, 未对跨域感知与控制进行综述 [9] 水域无人系统平台自主航行及协同控制研究进展 控制 综述水域无人平台航行与控制进展, 分析其面临的机遇与挑战 缺少对跨域集群组网综述, 并没有对集群过程中的关系进行剖析 [10] Review of hybrid aerial underwater vehicle: Cross-domain mobility and transitions control 控制 综述跨域混合动力飞行器研究进展, 分析了水动力对控制的影响 主要对单个装备跨域进行机理分析, 并没有对跨域集群进行综述 [11] 天空地一体化网络环境下多运动体系统跨域协同控制与智能决策 控制 综述天地空跨域决策与控制, 阐述云控制在其中的作用 主要考虑陆地环境中的跨域, 并没有将水下环境加入跨域体系  下载: 导出CSV
下载: 导出CSV
-
[1] 何玉庆, 秦天一, 王楠. 跨域协同: 无人系统技术发展和应用新趋势. 无人系统技术, 2021, 4(4): 1−13He Yu-Qing, Qin Tian-Yi, Wang Nan. Cross-domain collaboration: New trends in the development and application of unmanned systems technology. Unmanned Systems Technology, 2021, 4(4): 1−13 [2] 潘光, 宋保维, 黄桥高, 施瑶. 水下无人系统发展现状及其关键技术. 水下无人系统学报, 2017, 25(1): 44−51Pan Guang, Song Bao-Wei, Huang Qiao-Gao, Shi Yao. Development and key techniques of unmanned undersea system. Journal of Unmanned Undersea Systems, 2017, 25(1): 44−51 [3] 邱志明, 孟祥尧, 马焱, 陈轶, 冯炜. 海上无人系统发展及关键技术研究. 中国工程科学, 2023, 25(3): 74−83 doi: 10.15302/J-SSCAE-2023.03.005Qiu Zhi-Ming, Meng Xiang-Yao, Ma Yan, Chen Yi, Feng Wei. Development and key technologies of maritime unmanned systems. Strategic Study of CAE, 2023, 25(3): 74−83 doi: 10.15302/J-SSCAE-2023.03.005 [4] 王伟达, 赵东阳. 无人直升机空海潜跨域协同作战体系构建与应用. 中国电子科学研究院学报, 2022, 17(12): 1141−1146 doi: 10.3969/j.issn.1673-5692.2022.12.002Wang Wei-Da, Zhao Dong-Yang. Construction and application of unmanned helicopter air-sea-submarine cross-domain cooperative combat system. Journal of CAEIT, 2022, 17(12): 1141−1146 doi: 10.3969/j.issn.1673-5692.2022.12.002 [5] Pöllny O, Held A, Kargl F. Survey of air, sea, and road vehicles research for motion control security. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(7): 6748−6763 doi: 10.1109/TITS.2023.3264453 [6] 韦韬, 朱遴, 梁世龙. 水下无人系统集群感知与协同技术发展. 指挥控制与仿真, 2022, 44(5): 6−13 doi: 10.3969/j.issn.1673-3819.2022.05.002Wei Tao, Zhu Lin, Liang Shi-Long. Research on perception and cooperation technologies for underwater unmanned system swarm. Command Control & Simulation, 2022, 44(5): 6−13 doi: 10.3969/j.issn.1673-3819.2022.05.002 [7] Guo H Z, Li J Y, Liu J J, Tian N, Kato N. A survey on space-air-ground-sea integrated network security in 6G. IEEE Communications Surveys & Tutorials, 2022, 24(1): 53−87 [8] 杨健敏, 王佳惠, 乔钢, 刘凇佐, 马璐, 何鹏. 水声通信及网络技术综述. 电子与信息学报, 2024, 46(1): 1−21 doi: 10.11999/JEIT230424Yang Jian-Min, Wang Jia-Hui, Qiao Gang, Liu Song-Zuo, Ma Lu, He Peng. Review of underwater acoustic communication and network technology. Journal of Electronics & Information Technology, 2024, 46(1): 1−21 doi: 10.11999/JEIT230424 [9] 马勇, 王雯琦, 严新平. 水域无人系统平台自主航行及协同控制研究进展. 无人系统技术, 2022, 5(1): 1−16Ma Yong, Wang Wen-Qi, Yan Xin-Ping. Research progress on autonomous navigation and cooperative control of water area unmanned system platform. Unmanned Systems Technology, 2022, 5(1): 1−16 [10] Zeng Z, Lv C X, Bi Y B, Jin Y F, Lu D, Lian L. Review of hybrid aerial underwater vehicle: Cross-domain mobility and transitions control. Ocean Engineering, 2022, 248: Article No. 110840 doi: 10.1016/j.oceaneng.2022.110840 [11] 夏元清, 谢超, 高寒, 詹玉峰, 孙中奇, 戴荔, 等. 天空地一体化网络环境下多运动体系统跨域协同控制与智能决策. 控制与决策, 2023, 38(5): 1176−1199Xia Yuan-Qing, Xie Chao, Gao Han, Zhan Yu-Feng, Sun Zhong-Qi, Dai Li, et al. Cross-domain cooperative control and intelligent decision-making of multi-dynamic agents in space-air-ground integrated network environment: A review. Control and Decision, 2023, 38(5): 1176−1199 [12] 梁晓龙, 王宁, 王维佳, 可唯一. 海上跨域无人集群研究进展综述. 空军工程大学学报, 2023, 24(5): 2−15 doi: 10.3969/j.issn.2097-1915.2023.05.001Liang Xiao-Long, Wang Ning, Wang Wei-Jia, Ke Wei-Yi. Progress in maritime cross-domain manned swarms. Journal of Air Force Engineering University, 2023, 24(5): 2−15 doi: 10.3969/j.issn.2097-1915.2023.05.001 [13] Steiniger Y, Kraus D, Meisen T. Survey on deep learning based computer vision for sonar imagery. Engineering Applications of Artificial Intelligence, 2022, 114: Article No. 105157 doi: 10.1016/j.engappai.2022.105157 [14] Yan J, You K L, Cao W Q, Yang X, Guan X P. Binocular vision-based motion planning of an AUV: A deep reinforcement learning approach. IEEE Transactions on Intelligent Vehicles, DOI: 10.1109/TIV.2023.3321884 [15] 贾宁, 黄建纯. 水声通信技术综述. 物理, 2014, 43(10): 650−657 doi: 10.7693/wl20141002Jia Ning, Huang Jian-Chun. An overview of underwater acoustic communications. Physics, 2014, 43(10): 650−657 doi: 10.7693/wl20141002 [16] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战. 自动化学报, 2020, 46(5): 847−857Zhang Wei-Dong, Liu Xiao-Cheng, Han Peng. Progress and challenges of overwater unmanned systems. Acta Automatica Sinica, 2020, 46(5): 847−857 [17] Dempsey M E. Joint operational access concept (JOAC) [Online], available: https://dod.defense.gov/Portals/1/Documents/pubs/JOAC_Jan%202012_Signed.pdf, December 1, 2020 [18] 李磊, 王彤, 蒋琪. 从美军2042年无人系统路线图看无人系统关键技术发展动向. 无人系统技术, 2018, 1(4): 79−84Li Lei, Wang Tong, Jiang Qi. Key technology develop trends of unmanned systems viewed from unmanned systems integrated roadmap 2017—2042. Unmanned Systems Technology, 2018, 1(4): 79−84 [19] Zhang J L, Dai M H, Su Z. Task allocation with unmanned surface vehicles in smart ocean IoT. IEEE Internet of Things Journal, 2020, 7(10): 9702−9713 doi: 10.1109/JIOT.2020.2991578 [20] Ma S, Guo W H, Song R, Liu Y C. Unsupervised learning based coordinated multi-task allocation for unmanned surface vehicles. Neurocomputing, 2021, 420: 227−245 doi: 10.1016/j.neucom.2020.09.031 [21] Liu H S, Chen Q Y, Pan N, Sun Y X, Yang Y L. Three-dimensional mountain complex terrain and heterogeneous multi-UAV cooperative combat mission planning. IEEE Access, 2020, 8: 197407−197419 doi: 10.1109/ACCESS.2020.3033408 [22] Liu J, Du X Q, Cui J H, Pan M, Wei D B. Task-oriented intelligent networking architecture for the space-air-ground-aqua integrated network. IEEE Internet of Things Journal, 2020, 7(6): 5345−5358 doi: 10.1109/JIOT.2020.2977402 [23] Chen C, Liang X, Zhang Z, Zheng K, Liu D Y, Yu C D, et al. Cooperative target allocation for air-sea heterogeneous unmanned vehicles against saturation attacks. Journal of the Franklin Institute, 2024, 361(3): 1386−1402 doi: 10.1016/j.jfranklin.2023.12.058 [24] Tan G G, Zhuang J Y, Zou J, Wan L. Multi-type task allocation for multiple heterogeneous unmanned surface vehicles (USVs) based on the self-organizing map. Applied Ocean Research, 2022, 126: Article No. 103262 doi: 10.1016/j.apor.2022.103262 [25] Beard R W, McLain T W, Goodrich M A, Anderson E P. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Transactions on Robotics and Automation, 2002, 18(6): 911−922 doi: 10.1109/TRA.2002.805653 [26] Bai X S, Yan W S, Ge S S. Distributed task assignment for multiple robots under limited communication range. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(7): 4259−4271 doi: 10.1109/TSMC.2021.3094190 [27] Li J J, Zhang R B. Multi-AUV distributed task allocation based on the differential evolution quantum bee colony optimization algorithm. Polish Maritime Research, 2017, 24(3): 65−71 [28] Miguelañez E, Patrón P, Brown K E, Petillot Y R, Lane D M. Semantic knowledge-based framework to improve the situation awareness of autonomous underwater vehicles. IEEE Transactions on Knowledge and Data Engineering, 2011, 23(5): 759−773 doi: 10.1109/TKDE.2010.46 [29] Ferreira B M, Graça P A, Alves J C, Cruz N A. Single receiver underwater localization of an unsynchronized periodic acoustic beacon using synthetic baseline. IEEE Journal of Oceanic Engineering, 2023, 48(4): 1112−1126 doi: 10.1109/JOE.2023.3275611 [30] Zhang Y T, Di B Y, Wang P F, Lin J L, Song L Y. HetMEC: Heterogeneous multi-layer mobile edge computing in the 6G era. IEEE Transactions on Vehicular Technology, 2020, 69(4): 4388−4400 doi: 10.1109/TVT.2020.2975559 [31] Wu D P, Liu J, Yang Z G. Bilateral satisfaction aware participant selection with MEC for mobile crowd sensing. IEEE Access, 2020, 8: 48110−48122 doi: 10.1109/ACCESS.2020.2978774 [32] Yuan H T, Bi J, Duanmu S F. Cost optimization for partial computation offloading and resource allocation in heterogeneous mobile edge computing. In: Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC). Melbourne, Australia: IEEE, 2021. 3089−3094 [33] Mills J, Hu J, Min G Y. Multi-task federated learning for personalised deep neural networks in edge computing. IEEE Transactions on Parallel and Distributed Systems, 2022, 33(3): 630−641 doi: 10.1109/TPDS.2021.3098467 [34] Feng C Y, Yang H H, Wang S Y, Zhao Z Y, Quek T Q S. Hybrid learning: When centralized learning meets federated learning in the mobile edge computing systems. IEEE Transactions on Communications, 2023, 71(12): 7008−7022 doi: 10.1109/TCOMM.2023.3310529 [35] Zhang M Y, Chen H, Cai W Y. Hunting task allocation for heterogeneous multi-AUV formation target hunting in IoUT: A game theoretic approach. IEEE Internet of Things Journal, 2024, 11(5): 9142−9152 doi: 10.1109/JIOT.2023.3322197 [36] Wu Y, Low K H, Lv C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782−6787 doi: 10.1109/TVT.2020.2991983 [37] Zheng J B, Ding M H, Sun L, Liu H W. Distributed stochastic algorithm based on enhanced genetic algorithm for path planning of multi-UAV cooperative area search. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(8): 8290−8303 doi: 10.1109/TITS.2023.3258482 [38] Yang T T, Jiang Z, Sun R J, Cheng N, Feng H L. Maritime search and rescue based on group mobile computing for unmanned aerial vehicles and unmanned surface vehicles. IEEE Transactions on Industrial Informatics, 2020, 16(12): 7700−7708 doi: 10.1109/TII.2020.2974047 [39] Yan J, Lin J S, Yang X, Chen C L, Guan X P. Cooperation detection and tracking of underwater target via aerial-surface-underwater vehicles. IEEE Transactions on Automatic Control, DOI: 10.1109/TAC.2024.3447976 [40] Ma Y L, Zhang Q F, Wang H L. 6G: Ubiquitously extending to the vast underwater world of the oceans. Engineering, 2022, 8: 12−17 doi: 10.1016/j.eng.2021.07.017 [41] 王毅凡, 周密, 宋志慧. 水下无线通信技术发展研究. 通信技术, 2014, 47(6): 589−594 doi: 10.3969/j.issn.1002-0802.2014.06.001Wang Yi-Fan, Zhou Mi, Song Zhi-Hui. Development of underwater wireless communication technology. Communications Technology, 2014, 47(6): 589−594 doi: 10.3969/j.issn.1002-0802.2014.06.001 [42] Alharbi O, Xia W T, Wang M H, Deng P, Kane T. Measuring and modeling the air-sea interface and its impact on FSO systems. In: Proceedings of the SPIE 10770, Laser Communication and Propagation through the Atmosphere and Oceans VII. San Diego, USA: SPIE, 2018. Article No. 1077002 [43] Yellaiah J. Characteristics of nanosecond laser-induced underwater acoustic signals across the water-air interface. Acoustical Physics, 2023, 69(1): 7−19 doi: 10.1134/S1063771022600437 [44] Zhao Y, Li P, Zhang P H, Zhou Z Q, Li J Q. Application of laser-induced acoustic method on air-underwater communication. In: Proceedings of the International Conference on Space-air-ground Computing. Huizhou, China: IEEE, 2021. 77−82 [45] Coutinho R W L, Boukerche A. OMUS: Efficient opportunistic routing in multi-modal underwater sensor networks. IEEE Transactions on Wireless Communications, 2021, 20(9): 5642−5655 doi: 10.1109/TWC.2021.3069117 [46] Celik A, Saeed N, Shihada B, Al-Naffouri T Y, Alouini M S. Opportunistic routing for opto-acoustic internet of underwater things. IEEE Internet of Things Journal, 2022, 9(3): 2165−2179 doi: 10.1109/JIOT.2021.3090301 [47] Campagnaro F, Casari P, Zorzi M, Diamant R. Optimal transmission scheduling in small multimodal underwater networks. IEEE Wireless Communications Letters, 2019, 8(2): 368−371 doi: 10.1109/LWC.2018.2873329 [48] Zhao Z, Liu C F, Guang X Y, Li K Q. MLRS-RL: An energy-efficient multilevel routing strategy based on reinforcement learning in multimodal UWSNs. IEEE Internet of Things Journal, 2023, 10(13): 11708−11723 doi: 10.1109/JIOT.2023.3243730 [49] Diamant R, Campagnaro F, de Filippo de Grazia M, Casari P, Testolin A, Calzado V S, et al. On the relationship between the underwater acoustic and optical channels. IEEE Transactions on Wireless Communications, 2017, 16(12): 8037−8051 doi: 10.1109/TWC.2017.2756055 [50] Cao J B, Dou J F, Chu L, Qu C R, Wang L H, Zhao B L. Optimum data transmission allocation in multimodal communication of underwater sensor networks. IEEE Communications Letters, 2022, 26(4): 788−792 doi: 10.1109/LCOMM.2021.3090669 [51] Wang R S, Ma R F, Zhang Y, Liu G L, Kang W J. An energy-efficient multimode transmission scheme for underwater sensor network. IEEE Internet of Things Journal, 2023, 10(22): 19640−19654 doi: 10.1109/JIOT.2023.3281882 [52] Zhilin I V, Bushnaq O M, de Masi G, Natalizio E, Akyildiz I F. A universal multimode (acoustic, magnetic induction, optical, RF) software defined modem architecture for underwater communication. IEEE Transactions on Wireless Communications, 2023, 22(12): 9105−9116 doi: 10.1109/TWC.2023.3268418 [53] Zhao Z, Liu C F, Qu W Y, Yu T. An energy efficiency multi-level transmission strategy based on underwater multimodal communication in UWSNs. In: Proceedings of the IEEE Conference on Computer Communications. Toronto, Canada: IEEE, 2020. 1579−1587 [54] Francescon R, Campagnaro F, Coccolo E, Signori A, Guerra F, Favaro F, et al. An event-based stack for data transmission through underwater multimodal networks. In: Proceedings of the 5th Underwater Communications and Networking Conference (UComms). Lerici, Italy: IEEE, 2021. 1−5 [55] Wang C, Zhang P Y, Kumar N, Liu L, Yang T T. GCWCN: 6G-based global coverage wireless communication network architecture. IEEE Network, 2023, 37(3): 218−223 doi: 10.1109/MNET.123.2200094 [56] 陈佳佳, 张凤登, 张宇辉. 基于RTEthernet改进的时钟同步算法. 计算机测量与控制, 2022, 30(3): 229−233Chen Jia-Jia, Zhang Feng-Deng, Zhang Yu-Hui. Improved clock synchronization algorithm based on RTEthernet. Computer Measurement & Control, 2022, 30(3): 229−233 [57] Park S M, Kim H, Kim H W, Cho C N, Choi J Y. Synchronization improvement of distributed clocks in EtherCAT networks. IEEE Communications Letters, 2017, 21(6): 1277−1280 doi: 10.1109/LCOMM.2017.2668400 [58] Garg A, Yadav A, Sikora A, Sairam A S. Wireless precision time protocol. IEEE Communications Letters, 2018, 22(4): 812−815 doi: 10.1109/LCOMM.2017.2781706 [59] Jin X, An J P, Du C H, Pan G F, Wang S, Niyato D. Frequency-offset information aided self time synchronization scheme for high-dynamic multi-UAV networks. IEEE Transactions on Wireless Communications, 2024, 23(1): 607−620 doi: 10.1109/TWC.2023.3280536 [60] Alsolami F, Alqurashi F A, Hasan M K, Saeed R A, Abdel-Khalek S, Ben Ishak A. Development of self-synchronized drones' network using cluster-based swarm intelligence approach. IEEE Access, 2021, 9: 48010−48022 doi: 10.1109/ACCESS.2021.3064905 [61] Kebkal K G, Kebkal V K, Kebkal O G, Petroccia R. Underwater acoustic modems (S2CR series) for synchronization of underwater acoustic network clocks during payload data exchange. IEEE Journal of Oceanic Engineering, 2016, 41(2): 428−439 doi: 10.1109/JOE.2015.2431531 [62] Liu J, Wang Z H, Zuba M, Peng Z, Cui J H, Zhou S L. DA-sync: A Doppler-assisted time-synchronization scheme for mobile underwater sensor networks. IEEE Transactions on Mobile Computing, 2014, 13(3): 582−595 doi: 10.1109/TMC.2013.13 [63] Jin Z G, Ding M G, Luo Y M, Li S. Integrated time synchronization and multiple access protocol for underwater acoustic sensor networks. IEEE Access, 2019, 7: 101844−101854 doi: 10.1109/ACCESS.2019.2931117 [64] Zhou F, Wang Q, Han G J, Qiao G, Sun Z X, Niaz A. APE-sync: An adaptive power efficient time synchronization for mobile underwater sensor networks. IEEE Access, 2019, 7: 52379−52389 doi: 10.1109/ACCESS.2019.2912229 [65] Vermeij A, Munafò A. A robust, opportunistic clock synchronization algorithm for ad hoc underwater acoustic networks. IEEE Journal of Oceanic Engineering, 2015, 40(4): 841−852 doi: 10.1109/JOE.2015.2469955 [66] Gong Z J, Li C, Jiang F. AUV-aided joint localization and time synchronization for underwater acoustic sensor networks. IEEE Signal Processing Letters, 2018, 25(4): 477−481 doi: 10.1109/LSP.2018.2799699 [67] 于建宇, 林景胜, 闫敬, 曹文强, 张诗杭, 杨睍. 一种UAV-USV-UUV跨域协同时钟同步算法. 水下无人系统学报, 2024, 32(4): 678−687Yu Jian-Yu, Lin Jing-Sheng, Yan Jing, Cao Wen-Qiang, Zhang Shi-Hang, Yang Xian. Clock synchronization algorithm of UAV-USV-UUV cross-domain cooperation. Journal of Unmanned Undersea Systems, 2024, 32(4): 678−687 [68] 王恒, 彭政岑, 马文巧, 李敏. 免时间戳交互的无线传感网隐含节点同步参数估计算法. 自动化学报, 2022, 48(11): 2788−2796Wang Heng, Peng Zheng-Cen, Ma Wen-Qiao, Li Min. Synchronization parameter estimation algorithm of silent node in wireless sensor networks with timestamp-free exchange. Acta Automatica Sinica, 2022, 48(11): 2788−2796 [69] 刘妹琴, 韩学艳, 张森林, 郑荣濠, 兰剑. 基于水下传感器网络的目标跟踪技术研究现状与展望. 自动化学报, 2021, 47(2): 235−251Liu Mei-Qin, Han Xue-Yan, Zhang Sen-Lin, Zheng Rong-Hao, Lan Jian. Research status and prospect of target tracking technologies via underwater sensor networks. Acta Automatica Sinica, 2021, 47(2): 235−251 [70] Ke C, Chen H F. Cooperative path planning for air–sea heterogeneous unmanned vehicles using search-and-tracking mission. Ocean Engineering, 2022, 262: Article No. 112020 doi: 10.1016/j.oceaneng.2022.112020 [71] Cao X, Liu W Z, Ren L. Underwater target capture based on heterogeneous unmanned system collaboration. IEEE Transactions on Intelligent Vehicles, DOI: 10.1109/TIV.2024.3362358 [72] Zhang J, Sha J F, Han G J, Liu J, Qian Y J. A cooperative-control-based underwater target escorting mechanism with multiple autonomous underwater vehicles for underwater internet of things. IEEE Internet of Things Journal, 2021, 8(6): 4403−4416 doi: 10.1109/JIOT.2020.3026355 [73] Lindsay J, Ross J, Seto M L, Gregson E, Moore A, Patel J, et al. Collaboration of heterogeneous marine robots toward multidomain sensing and situational awareness on partially submerged targets. IEEE Journal of Oceanic Engineering, 2022, 47(4): 880−894 doi: 10.1109/JOE.2022.3156631 [74] Yang X K, Wang W, Huang P. Distributed optimal consensus with obstacle avoidance algorithm of mixed-order UAVs-USVs-UUVs systems. ISA Transactions, 2020, 107: 270−286 doi: 10.1016/j.isatra.2020.07.028 [75] Jia Z H, Lu H B, Li S Q, Zhang W D. Distributed dynamic rendezvous control of the AUV-USV joint system with practical disturbance compensations using model predictive control. Ocean Engineering, 2022, 258: Article No. 111268 doi: 10.1016/j.oceaneng.2022.111268 [76] Li S S, Wang X J, Wang S P, Zhang Y W. Distributed bearing-only formation control for UAV-UWSV heterogeneous system. Drones, 2023, 7(2): Article No. 124 doi: 10.3390/drones7020124 [77] Enayat M, Khorasani K. Semi-decentralized nonlinear cooperative control strategies for a network of heterogeneous autonomous underwater vehicles. International Journal of Robust and Nonlinear Control, 2017, 27(16): 2688−2707 doi: 10.1002/rnc.3707 [78] Dixon C, Frew E W. Optimizing cascaded chains of unmanned aircraft acting as communication relays. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 883−898 doi: 10.1109/JSAC.2012.120605 [79] Guo Y J, You C S, Yin C C, Zhang R. UAV trajectory and communication co-design: Flexible path discretization and path compression. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3506−3523 doi: 10.1109/JSAC.2021.3088690 [80] Wu Q Q, Zeng Y, Zhang R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Transactions on Wireless Communications, 2018, 17(3): 2109−2121 doi: 10.1109/TWC.2017.2789293 [81] Yan J, Zhang L, Yang X, Chen C L, Guan X P. Communication-aware motion planning of AUV in obstacle-dense environment: A binocular vision-based deep learning method. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(12): 14927−14943 doi: 10.1109/TITS.2023.3296415 [82] Cao W Q, Yan J, Yang X, Luo X Y, Guan X P. Communication-aware formation control of AUVs with model uncertainty and fading channel via integral reinforcement learning. IEEE/CAA Journal of Automatica Sinica, 2023, 10(1): 159−176 doi: 10.1109/JAS.2023.123021 [83] Deng Y J, Zhang X K, Zhang G Q. Line-of-sight-based guidance and adaptive neural path-following control for sailboats. IEEE Journal of Oceanic Engineering, 2020, 45(4): 1177−1189 doi: 10.1109/JOE.2019.2923502 [84] Burlutskiy N, Touahmi Y, Lee B H. Power efficient formation configuration for centralized leader-follower AUVs control. Journal of Marine Science and Technology, 2012, 17(3): 315−329 doi: 10.1007/s00773-012-0167-0 [85] Choi S, Kim J. Three dimensional formation control to pursue an underwater evader utilizing underwater robots measuring the sound generated from the evader. IEEE Access, 2019, 7: 150720−150728 doi: 10.1109/ACCESS.2019.2948049 [86] Moreno-Salinas D, Crasta N, Pascoal A M, Aranda J. Formation control of surface marine vehicles for underwater target tracking using range information. In: Proceedings of the 13th APCA International Conference on Automatic Control and Soft Computing (CONTROLO). Ponta Delgada, Portugal: IEEE, 2018. 201−206 [87] Liu H, Wang Y H, Lewis F L. Robust distributed formation controller design for a group of unmanned underwater vehicles. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 1215−1223 doi: 10.1109/TSMC.2019.2895499 [88] Gao Z Y, Guo G. Fixed-time sliding mode formation control of AUVs based on a disturbance observer. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 539−545 doi: 10.1109/JAS.2020.1003057 [89] Wang J Q, Wang C, Wei Y J, Zhang C J. Filter-backstepping based neural adaptive formation control of leader-following multiple AUVs in three dimensional space. Ocean Engineering, 2020, 201: Article No. 107150 doi: 10.1016/j.oceaneng.2020.107150 [90] Yuan C Z, Licht S, He H B. Formation learning control of multiple autonomous underwater vehicles with heterogeneous nonlinear uncertain dynamics. IEEE Transactions on Cybernetics, 2018, 48(10): 2920−2934 doi: 10.1109/TCYB.2017.2752458 [91] Wang D H, Yuan J, Xu J, Zhou Z H. Finite-time formation control for autonomous underwater vehicles based on hierarchical leader-follower. Applied Mechanics and Materials, 2014, 541−542: 1164−1167 doi: 10.4028/www.scientific.net/AMM.541-542.1164 [92] Das B, Subudhi B, Pati B B. Co-operative control of a team of autonomous underwater vehicles in an obstacle-rich environment. Journal of Marine Engineering & Technology, 2016, 15(3): 135−151 [93] Tangirala S, Kumar R, Bhattacharyya S, O'Connor M, Holloway L E. Hybrid-model based hierarchical mission control architecture for autonomous underwater vehicles. In: Proceedings of the American Control Conference. Portland, USA: IEEE, 2005. 668−673 [94] Jia Y N, Wang L. Leader-follower flocking of multiple robotic fish. IEEE/ASME Transactions on Mechatronics, 2015, 20(3): 1372−1383 doi: 10.1109/TMECH.2014.2337375 [95] Heshmati-Alamdari S, Bechlioulis C P, Karras G C, Kyriakopoulos K J. Cooperative impedance control for multiple underwater vehicle manipulator systems under lean communication. IEEE Journal of Oceanic Engineering, 2021, 46(2): 447−465 doi: 10.1109/JOE.2020.2989603 [96] Wang L L, Zhu D Q, Pang W, Luo C M. A novel obstacle avoidance consensus control for multi-AUV formation system. IEEE/CAA Journal of Automatica Sinica, 2023, 10(5): 1304−1318 doi: 10.1109/JAS.2023.123201 [97] Zhen Q Z, Wan L, Li Y L, Jiang D P. Formation control of a multi-AUVs system based on virtual structure and artificial potential field on SE(3). Ocean Engineering, 2022, 253: Article No. 111148 doi: 10.1016/j.oceaneng.2022.111148 [98] Pang W, Zhu D Q, Sun C Y. Multi-AUV formation reconfiguration obstacle avoidance algorithm based on affine transformation and improved artificial potential field under ocean currents disturbance. IEEE Transactions on Automation Science and Engineering, 2024, 21(2): 1469−1487 doi: 10.1109/TASE.2023.3245818 [99] Yan J, Gao J, Yang X, Luo X Y, Guan X P. Position tracking control of remotely operated underwater vehicles with communication delay. IEEE Transactions on Control Systems Technology, 2020, 28(6): 2506−2514 doi: 10.1109/TCST.2019.2928488 [100] Belleter D, Maghenem M A, Paliotta C, Pettersen K Y. Observer based path following for underactuated marine vessels in the presence of ocean currents: A global approach. Automatica, 2019, 100: 123−134 doi: 10.1016/j.automatica.2018.11.008 [101] Fang Y, Huang Z W, Pu J Y, Zhang J S. AUV position tracking and trajectory control based on fast-deployed deep reinforcement learning method. Ocean Engineering, 2022, 245: Article No. 110452 doi: 10.1016/j.oceaneng.2021.110452 [102] Kong S H, Sun J L, Qiu C L, Wu Z X, Yu J Z. Extended state observer-based controller with model predictive governor for 3-D trajectory tracking of underactuated underwater vehicles. IEEE Transactions on Industrial Informatics, 2021, 17(9): 6114−6124 doi: 10.1109/TII.2020.3036665 [103] Park B S, Kwon J W, Kim H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica, 2017, 77: 353−359 doi: 10.1016/j.automatica.2016.11.024 [104] Li T S, Zhao R, Chen C L P, Fang L Y, Liu C. Finite-time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Transactions on Cybernetics, 2018, 48(11): 3243−3253 doi: 10.1109/TCYB.2018.2794968 [105] Li S H, Wang X Y. Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica, 2013, 49(11): 3359−3367 doi: 10.1016/j.automatica.2013.08.003 [106] 林安辉, 蒋德松, 曾建平. 具有输入饱和的欠驱动船舶编队控制. 自动化学报, 2018, 44(8): 1496−1504Lin An-Hui, Jiang De-Song, Zeng Jian-Ping. Underactuated ship formation control with input saturation. Acta Automatica Sinica, 2018, 44(8): 1496−1504 [107] Shojaei K, Chatraei A. Robust platoon control of underactuated autonomous underwater vehicles subjected to nonlinearities, uncertainties and range and angle constraints. Applied Ocean Research, 2021, 110: Article No. 102594 doi: 10.1016/j.apor.2021.102594 [108] Bai X S, Yan W S, Cao M. Clustering-based algorithms for multivehicle task assignment in a time-invariant drift field. IEEE Robotics and Automation Letters, 2017, 2(4): 2166−2173 doi: 10.1109/LRA.2017.2722541 [109] Bai X S, Yan W S, Cao M, Xue D. Distributed multi-vehicle task assignment in a time-invariant drift field with obstacles. IET Control Theory & Applications, 2019, 13(17): 2886−2893 [110] Zhang J L, Yan J G. A novel control approach for flight-stability of fixed-wing UAV formation with wind field. IEEE Systems Journal, 2021, 15(2): 2098−2108 doi: 10.1109/JSYST.2020.3002809 [111] Yan J, Guo D B, Luo X Y, Guan X P. AUV-aided localization for underwater acoustic sensor networks with current field estimation. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8855−8870 doi: 10.1109/TVT.2020.2996513 [112] 李文霞, 毛登森. 马航搜救行动中主要国家的搜救装备综述. 电光系统, 2014(4): 1−9Li Wen-Xia, Mao Deng-Sen. A review for search and rescue equipment of main countries for missing Malaysia airlines flight 370. Electronic and Electro-Optical Systems, 2014(4): 1−9 [113] 张辉. 大型海上联合演习秦皇岛水域举行 [Online], available: https://yzdsb.hebnews.cn/pc/paper/c/201906/20/c147436.html, 2019-06-20Zhang Hui. Large scale maritime joint exercise held in Qinhuangdao waters [Online], available: https://yzdsb.hebnews.cn/pc/paper/c/201906/20/c147436.html, June 20, 2019 [114] 景强, 郑顺潮, 梁鹏, 汪劲丰. 港珠澳大桥智能化运维技术与工程实践. 中国公路学报, 2023, 36(6): 143−156Jing Qiang, Zheng Shun-Chao, Liang Peng, Wang Jin-Feng. Technologies and engineering practices of intelligent operation and maintenance of Hong Kong-Zhuhai-Macao Bridge. China Journal of Highway and Transport, 2023, 36(6): 143−156 [115] 李家彪, 王叶剑, 刘磊, 许学伟. 深海矿产资源开发技术发展现状与展望. 前瞻科技, 2022, 1(2): 92−102 doi: 10.3981/j.issn.2097-0781.2022.02.007Li Jia-Biao, Wang Ye-Jian, Liu Lei, Xu Xue-Wei. Current status and prospect of deep-sea mining technology. Science and Technology Foresight, 2022, 1(2): 92−102 doi: 10.3981/j.issn.2097-0781.2022.02.007 [116] Mealey R M. A method for calculating error probabilities in a radar communication system. IEEE Transactions on Space Electronics and Telemetry, 1963, 9(2): 37−42 doi: 10.1109/TSET.1963.4337601 [117] 闫敬, 关新平, 罗小元, 杨晛. 水下信息物理系统探测–通信–控制一体化: 挑战与进展. 控制理论与应用, 2022, 39(11): 1996−2008 doi: 10.7641/CTA.2021.10812Yan Jing, Guan Xin-Ping, Luo Xiao-Yuan, Yang Xian. Towards the integration of detection, communication and control for underwater cyber physical system: Challenges and progresses. Control Theory & Applications, 2022, 39(11): 1996−2008 doi: 10.7641/CTA.2021.10812 [118] Darvish K, Penco L, Ramos J, Cisneros R, Pratt J, Yoshida E, et al. Teleoperation of humanoid robots: A survey. IEEE Transactions on Robotics, 2023, 39(3): 1706−1727 doi: 10.1109/TRO.2023.3236952 [119] Yang J C, Xi M, Wen J B, Li Y, Song H H. A digital twins enabled underwater intelligent internet vehicle path planning system via reinforcement learning and edge computing. Digital Communications and Networks, 2024, 10(2): 282−291 doi: 10.1016/j.dcan.2022.05.005 -

 下载:
下载:


计量
- 文章访问数: 6457
- HTML全文浏览量: 4871
- PDF下载量: 834
- 被引次数: 0
