

Modeling and Control of Dielectric Elastomer Actuator Based on Neural Ordinary Differential Equation and Nonlinear Model Predictive Control
-
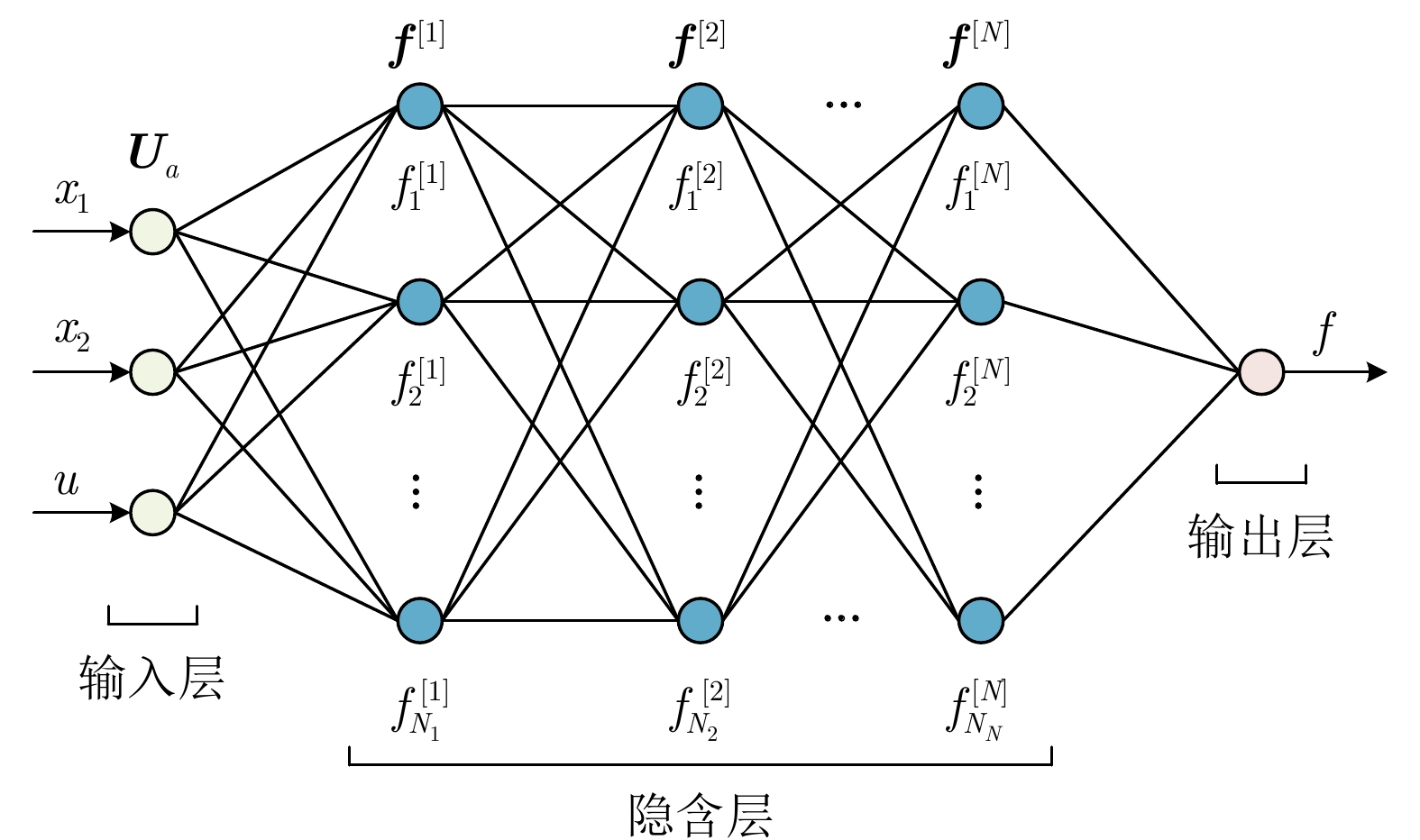
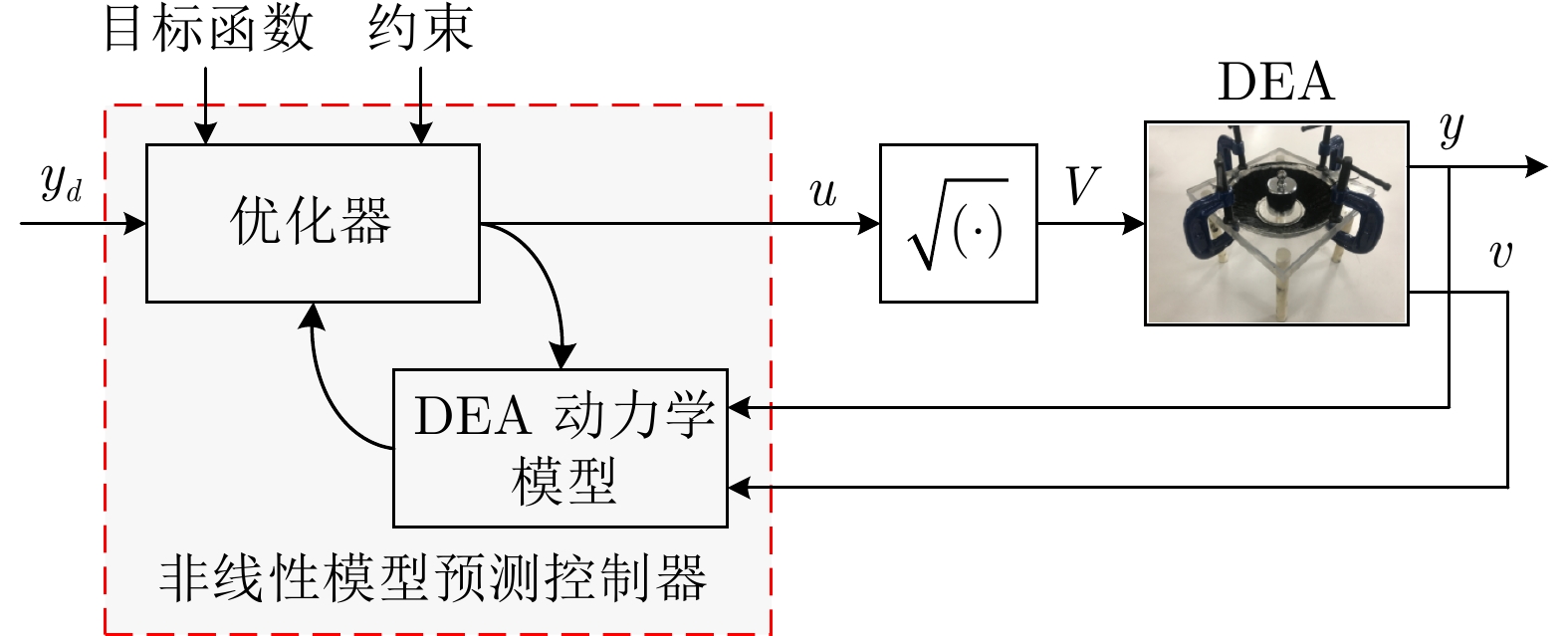
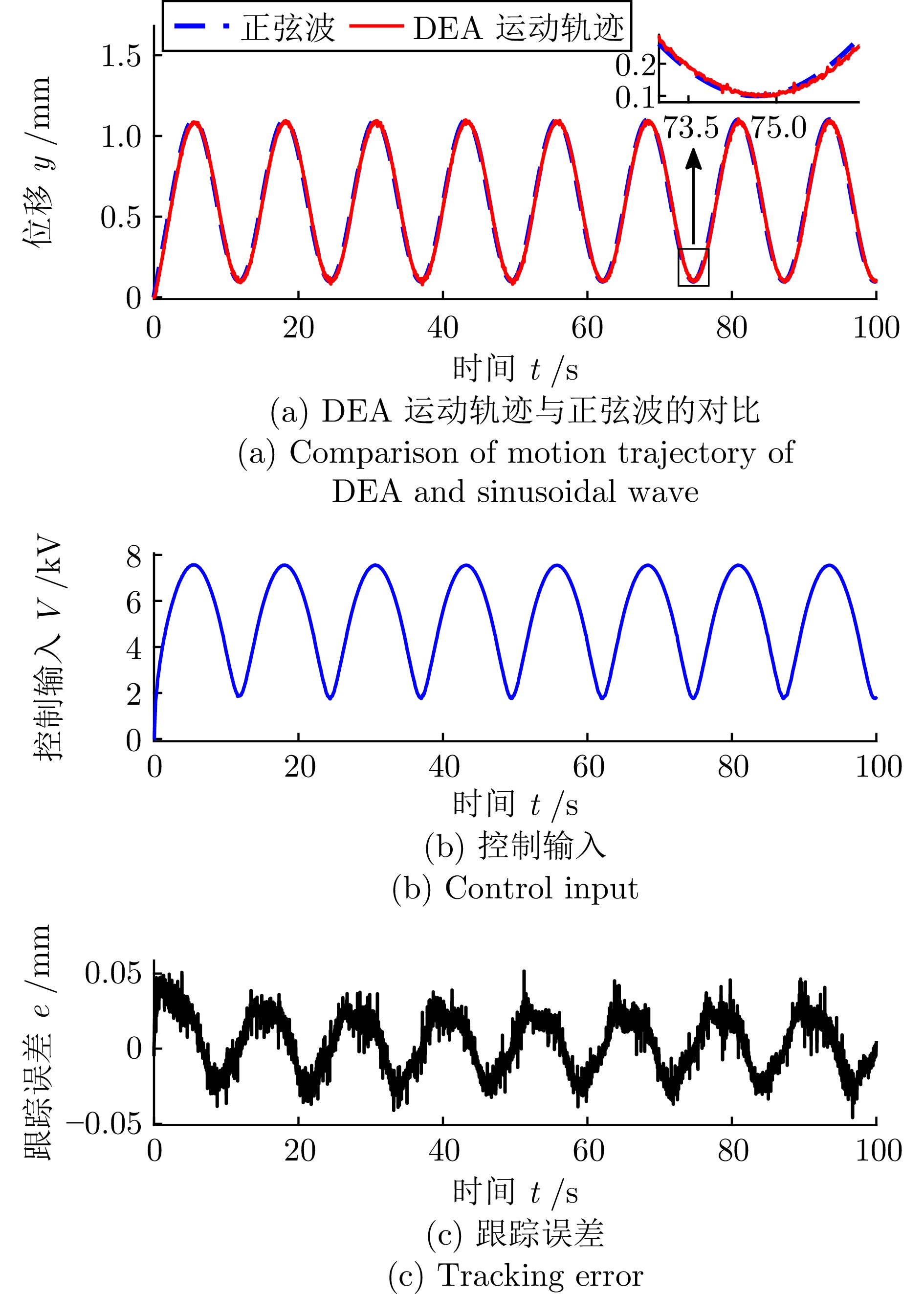
摘要: 针对介电弹性体驱动器(Dielectric elastomer actuator, DEA)建模与控制的挑战性问题, 提出基于神经网络常微分方程(Ordinary differential equation, ODE)和非线性模型预测控制(Model predictive control, MPC)的DEA动力学建模与跟踪控制方法. 首先, 基于神经网络ODE建立DEA的动力学模型以描述其复杂的动态行为. 然后, 基于所建立的DEA动力学模型, 设计非线性模型预测控制器实现其跟踪控制目标. 最后, 在所搭建的实验平台上进行一系列跟踪控制实验. 在所有实验结果中, DEA的运动均能很好地跟踪目标轨迹, 且相对均方根误差均不超过3.30%, 说明了所提动力学建模与跟踪控制方法的有效性.Abstract: For challenging problems in modeling and control of dielectric elastomer actuators (DEA), this paper proposed dynamic modeling and tracking control methods for a DEA based on the neural ordinary differential equation (ODE) and nonlinear model predictive control (MPC). First, a dynamic model of the DEA was established based on the neural ODE to describe its complicated dynamics behavior. Then, based on the established dynamic model of the DEA, a nonlinear model predictive controller was designed to realize its tracking control objective. Finally, a series of tracking control experiments were conducted on the built experimental platform. In all experimental results, the motion of the DEA can track the target trajectory well, and all relative root-mean-square-errors are no more than 3.30%, which illustrates the effectiveness of proposed dynamic modeling and tracking control methods.
-
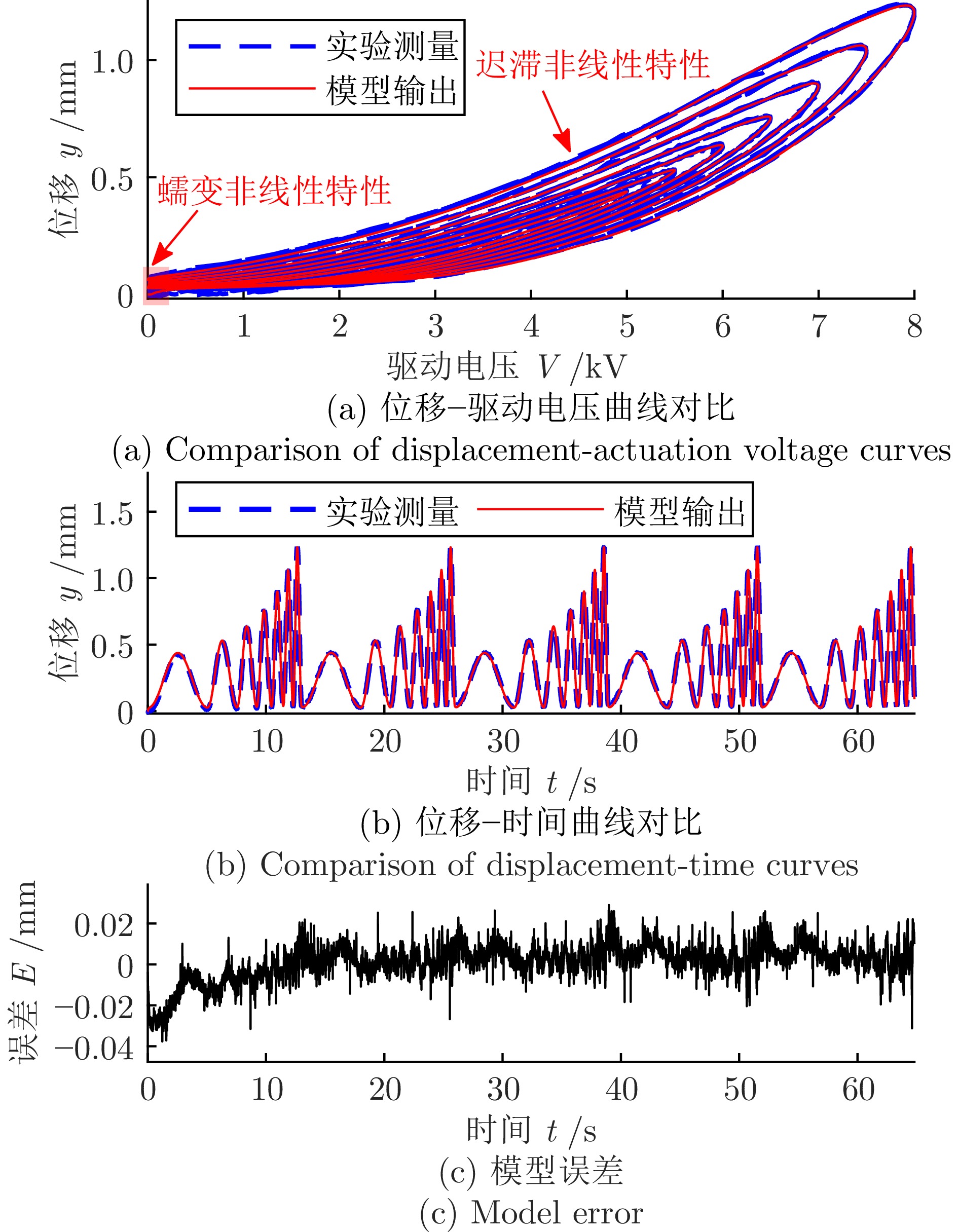
图 6 DEA动力学模型输出值与实验测量值的对比
Fig. 6 Comparison between output of dynamic model of DEA and experimental measurement
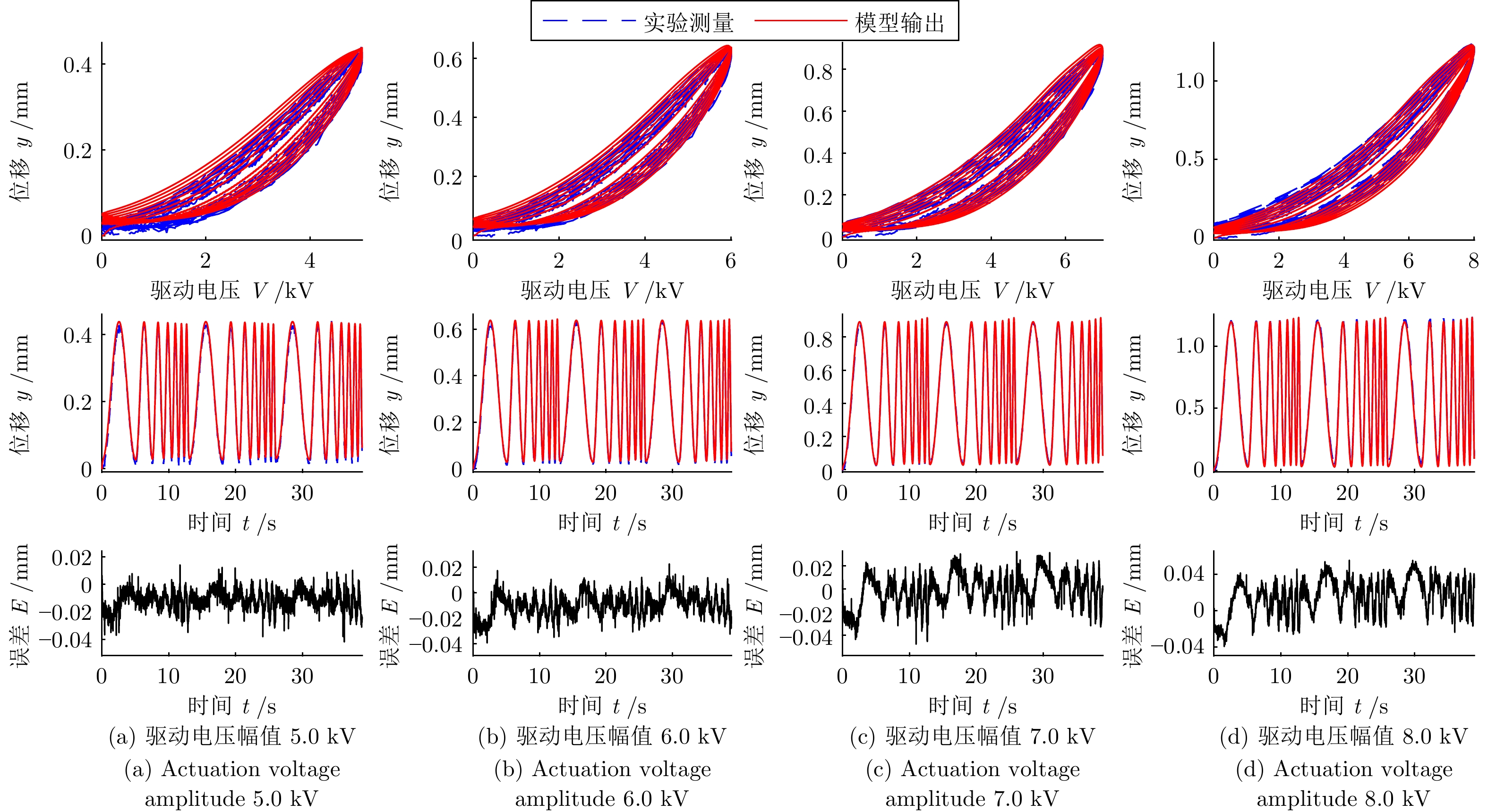
图 7 在不同驱动电压幅值情况下的模型验证结果
Fig. 7 Model validation results in different actuation voltage amplitudes
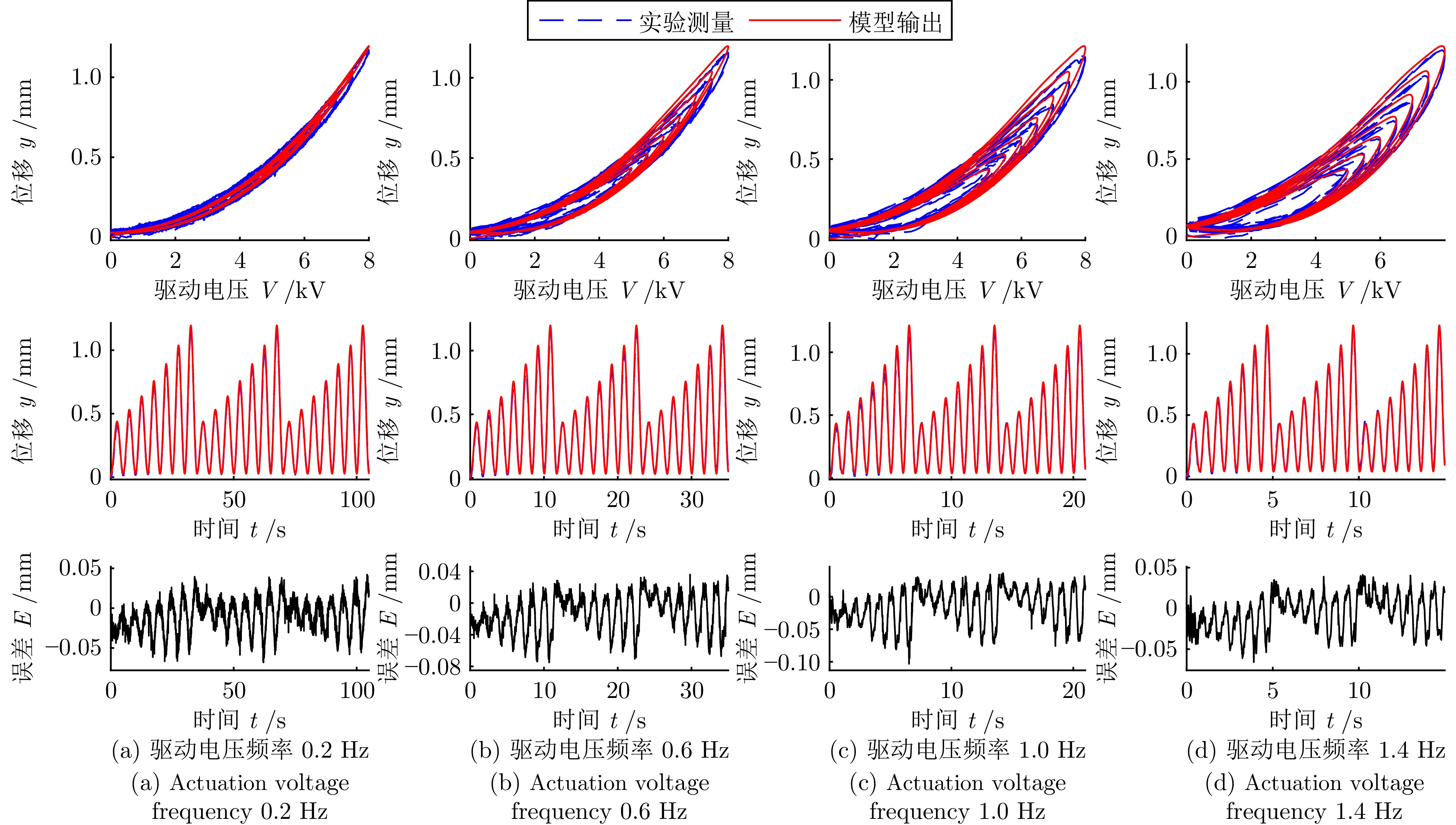
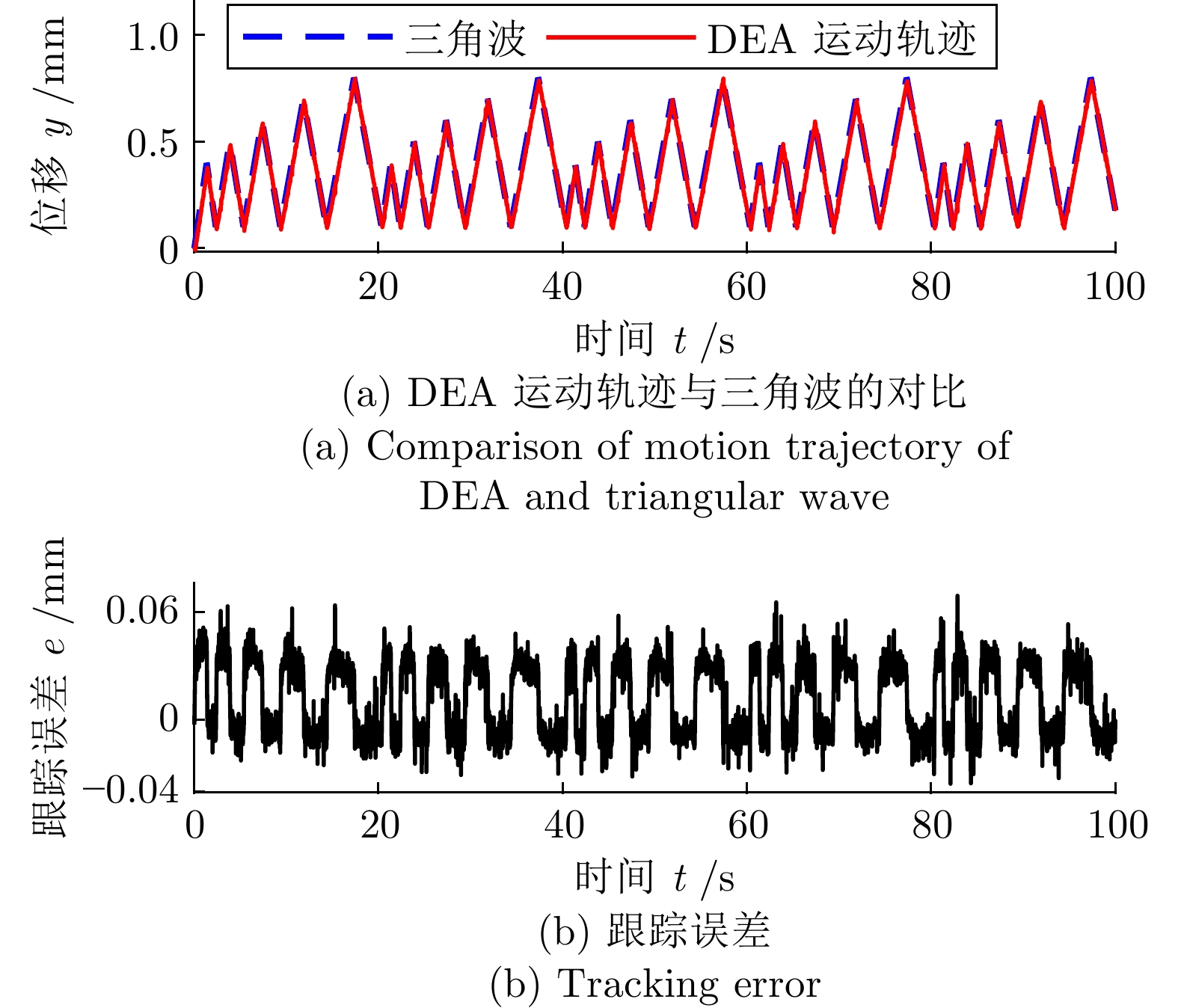
图 8 在不同驱动电压频率情况下的模型验证结果
Fig. 8 Model validation results in different actuation voltage frequencies
表 1 第1个实验方案中所有实验的相对均方根误差
Table 1 $E_R$ for all experiments of the first experimental scheme
$m$ $a_m$ (kV) $E_R$ (%) 1 5.0 3.12 2 6.0 1.53 3 7.0 1.55 4 8.0 2.16  下载: 导出CSV
下载: 导出CSV
表 2 第2个实验方案中所有实验的相对均方根误差
Table 2 $E_R$ for all experiments of the second experimental scheme
$m$ ${\psi}_m$ (Hz) $E_R$ (%) 1 0.2 1.82 2 0.6 2.10 3 1.0 2.50 4 1.4 1.89
下载: 导出CSV
表 3 ${{N}_{p}}$和${{N}_{c}}$取值对控制精度、单步运行时间和实时性的影响
Table 3 Influences of values of ${{N}_{p}}$ and ${{N}_{c}}$ on control accuracy, single-step running time and real-time performance
${{N}_{p}}$ ${{N}_{c}}$ $E_R$ (%) $T_c$ (s) 实时性 2 1 3.26 $5.08\times {10^{ - 3}}$ 满足 4 2 2.83 $8.39\times {10^{ - 3}}$ 满足 5 2 1.88 $8.91\times {10^{ - 3}}$ 满足 6 4 — $1.85\times {10^{ - 2}}$ 不满足
下载: 导出CSV
-
[1] Rus D, Tolley M T. Design, fabrication and control of soft robots. Nature, 2015, 521(7553): 467−475 doi: 10.1038/nature14543 [2] 文力, 王贺升. 软体机器人研究展望: 结构、驱动与控制. 机器人, 2018, 40(5): 577Wen Li, Wang He-Sheng. Prospects for soft robotics research: Structure, actuation and control. Robot, 2018, 40(5): 577 [3] 徐璠, 王贺升. 软体机械臂水下自适应鲁棒视觉伺服. 自动化学报, 2023, 49(4): 744−753Xu Fan, Wang He-Sheng. Adaptive robust visual servoing control of a soft manipulator in underwater environment. Acta Automatica Sinica, 2023, 49(4): 744−753 [4] Naclerio N D, Karsai A, Murray-Cooper M, Ozkan-Aydin Y, Aydin E, Goldman D I, et al. Controlling subterranean forces enables a fast, steerable, burrowing soft robot. Science Robotics, 2021, 6(55): Article No. eabe2922 doi: 10.1126/scirobotics.abe2922 [5] 王成军, 邓海龙. 软体机器人在康复训练领域的应用. 机械传动, 2024, 48(5): 169−176Wang Cheng-Jun, Deng Hai-Long. Application of soft robots in rehabilitation training. Journal of Mechanical Transmission, 2024, 48(5): 169−176 [6] 李兴旺, 滕燕, 徐迎. 一种基于双稳态驱动器的气动软体四足机器人. 机器人, 2024, 46(3): 294−304Li Xing-Wang, Teng Yan, Xu Ying. A pneumatic soft quadruped robot based on a bistable actuator. Robot, 2024, 46(3): 294−304 [7] Wu J D, Ye W J, Wang Y W, Su C Y. Modeling based on a two-step parameter identification strategy for liquid crystal elastomer actuator considering dynamic phase transition process. IEEE Transactions on Cybernetics, 2023, 53(7): 4423−4434 doi: 10.1109/TCYB.2022.3179433 [8] Pelrine R, Kornbluh R, Pei Q B, Joseph J. High-speed electrically actuated elastomers with strain greater than 100%. Science, 2000, 287(5454): 836−839 doi: 10.1126/science.287.5454.836 [9] 李智, 陈国强, 徐泓智, 陈新开, 陕晋军, 张秀宇. 介电弹性体驱动系统建模及控制方法综述. 控制与决策, 2023, 38(8): 2283−2300Li Zhi, Chen Guo-Qiang, Xu Hong-Zhi, Chen Xin-Kai, Shan Jin-Jun, Zhang Xiu-Yu. A review of modeling and control methods for dielectric elastomer actuator systems. Control and Decision, 2023, 38(8): 2283−2300 [10] Chen Y F, Zhao H C, Mao J, Chirarattananon P, Helbling E F, Hyun N P, et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature, 2019, 575(7782): 324−329 doi: 10.1038/s41586-019-1737-7 [11] Gu G Y, Zou J, Zhao R K, Zhao X H, Zhu X Y. Soft wall-climbing robots. Science Robotics, 2018, 3(25): Article No. eaat2874 doi: 10.1126/scirobotics.aat2874 [12] Li G R, Chen X P, Zhou F H, Liang Y M, Xiao Y H, Cao X N, et al. Self-powered soft robot in the Mariana Trench. Nature, 2021, 591(7848): 66−71 doi: 10.1038/s41586-020-03153-z [13] Zhang Y, Wu J D, Meng Q X, Wang Y W, Su C Y. Robust control of dielectric elastomer smart actuator for tracking high-frequency trajectory. IEEE Transactions on Industrial Informatics, 2024, 20(1): 224−234 doi: 10.1109/TII.2023.3258445 [14] Huang P, Wu J D, Zhang P, Wang Y W, Su C Y. Dynamic modeling and tracking control for dielectric elastomer actuator with a model predictive controller. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1819−1828 doi: 10.1109/TIE.2021.3063976 [15] Suo Z G. Theory of dielectric elastomers. Acta Mechanica Solida Sinica, 2010, 23(6): 549−578 doi: 10.1016/S0894-9166(11)60004-9 [16] Xiao H, Wu J D, Ye W J, Wang Y W. Dynamic modeling of dielectric elastomer actuators based on thermodynamic theory. Mechanics of Advanced Materials and Structures, 2022, 29(11): 1543−1552 doi: 10.1080/15376494.2020.1829757 [17] Huang P, Ye W J, Wang Y W. Dynamic modeling of dielectric elastomer actuator with conical shape. Plos One, 2020, 15(8): Article No. e0235229 doi: 10.1371/journal.pone.0235229 [18] Zou J, Gu G Y. High-precision tracking control of a soft dielectric elastomer actuator with inverse viscoelastic hysteresis compensation. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 36−44 doi: 10.1109/TMECH.2018.2873620 [19] Wang H C, Fu T F, Du Y Q, Gao W H, Huang K X, Liu Z M, et al. Scientific discovery in the age of artificial intelligence. Nature, 2023, 620(7972): 47−60 doi: 10.1038/s41586-023-06221-2 [20] Linot A J, Burby J W, Tang Q, Balaprakash P, Graham M D, Maulik R. Stabilized neural ordinary differential equations for long-time forecasting of dynamical systems. Journal of Computational Physics, 2023, 474: Article No. 111838 doi: 10.1016/j.jcp.2022.111838 [21] Hornik K, Stinchcombe M, White H. Universal approximation of an unknown mapping and its derivatives using multilayer feedforward networks. Neural Networks, 1990, 3(5): 551−560 doi: 10.1016/0893-6080(90)90005-6 [22] Gupta U, Wang Y Z, Ren H L, Zhu J. Dynamic modeling and feedforward control of jaw movements driven by viscoelastic artificial muscles. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 25−35 doi: 10.1109/TMECH.2018.2875521 [23] Wang Y W, Huang P, Wu J D, Su C Y. Modelling and compound control of intelligently dielectric elastomer actuator. Control Engineering Practice, 2022, 126: Article No. 105261 doi: 10.1016/j.conengprac.2022.105261 [24] Lu F, Lin K K, Chorin A J. Comparison of continuous and discrete-time data-based modeling for hypoelliptic systems. Communications in Applied Mathematics and Computational Science, 2016, 11(2): 187−216 doi: 10.2140/camcos.2016.11.187 [25] 陈虹. 模型预测控制. 北京: 科学出版社, 2013. 245−251Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. 245−251 [26] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战. 自动化学报, 2013, 39(3): 222−236 doi: 10.1016/S1874-1029(13)60024-5Xi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control——Status and challenges. Acta Automatica Sinica, 2013, 39(3): 222−236 doi: 10.1016/S1874-1029(13)60024-5 [27] 章越. 介电弹性体驱动器动力学建模与轨迹跟踪控制 [硕士学位论文], 中国地质大学, 2023.Zhang Yue. Dynamic Modeling and Trajectory Tracking Control of Dielectric Elastomer Actuator [Master thesis], China University of Geosciences, China, 2023. [28] Zhang X Y, Xu H Z, Chen X K, Li Z, Su C Y. Modeling and adaptive output feedback control of butterfly-like hysteretic nonlinear systems with creep and their applications. IEEE Transactions on Industrial Electronics, 2023, 70(5): 5182−5191 doi: 10.1109/TIE.2022.3187583 -


计量
- 文章访问数: 233
- HTML全文浏览量: 116
- PDF下载量: 39
- 被引次数: 0
