

Domain Adversarial Adaptive Learning Based Attitude Stabilization Method for Rotary Wing Unmanned Aerial Vehicles
-
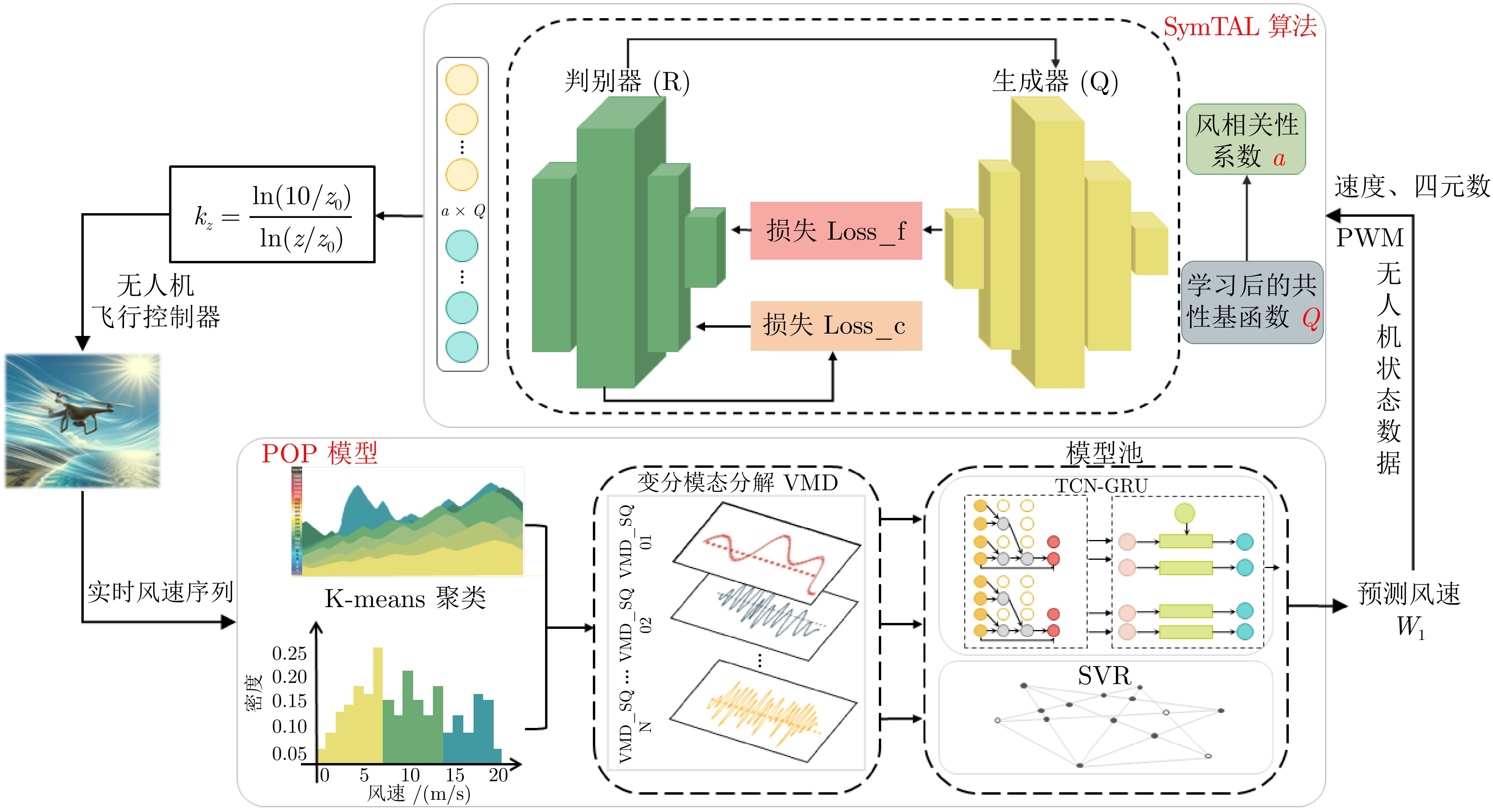
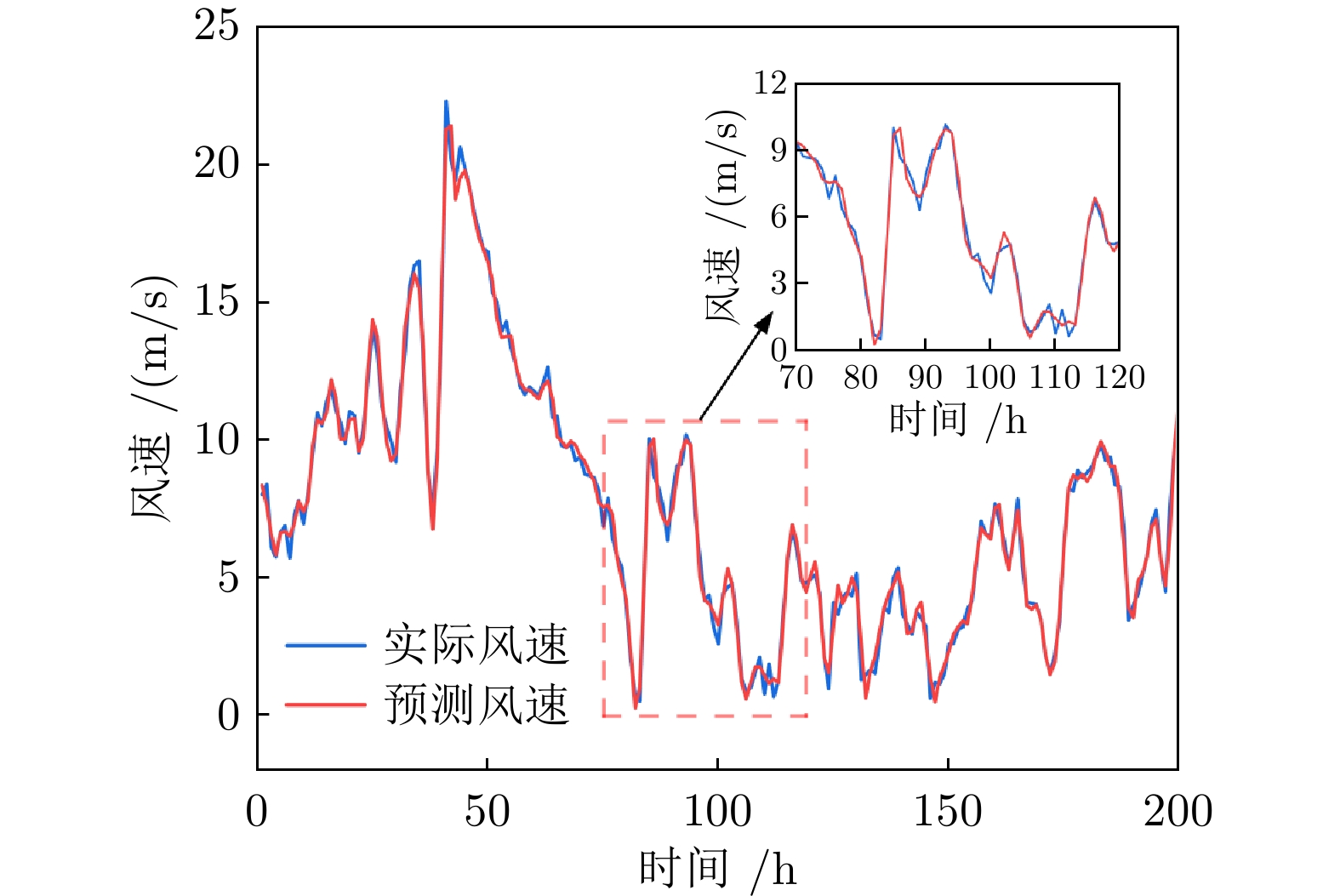
摘要: 针对复杂海风环境下旋翼无人机姿态控制不稳定的问题, 提出姿态稳定方法(SymTAL-POP). 该方法包括离线学习和在线预测两个部分. 在离线学习阶段, 引入对称式时序域对抗自适应学习算法SymTAL. 结合域对抗学习、对称网络和双向时序网络, SymTAL有效解决了海风环境中无人机姿态稳定问题. 利用深度学习优化加速框架和改进的Adam优化器, 提升了SymTAL的学习能力和计算效率. 在线预测阶段, 设计风场预测模型POP, 实现海风环境的实时感知与预测. POP采用变分模态分解技术处理风速信号, 通过特征选择策略预测不同风况下的风速, 增强了无人机的环境适应能力. 测试结果表明, SymTAL在学习效率和控制精度方面均优于其他姿态稳定算法, POP在连续风、间歇风和湍流风的多风况条件下的预测精度优于其他模型. 仿真实验表明SymTAL-POP在轨迹跟踪误差上表现突出, 平均值降低23.5%, 均方根误差减少55.2%.Abstract: To address the problem of unstable attitude control of rotary wing unmanned aerial vehicles (UAVs) in complex sea breeze environments, the attitude stabilization method named SymTAL-POP is proposed. The method consists of two parts: Offline learning and online prediction. In the offline learning phase, a symmetric temporal domain adversarial adaptive learning algorithm named SymTAL is introduced. By combining domain adversarial learning, symmetric networks and bidirectional temporal networks, SymTAL effectively solves the problem of UAVs attitude stabilization in the sea breeze environments. Utilizing a deep learning optimization acceleration framework and an improved Adam optimizer, the learning capability and computational efficiency of SymTAL are enhanced. In the online prediction phase, a wind field prediction model named POP is designed for real-time sea breeze environment perception and prediction. POP utilizes variational mode decomposition technology to process wind speed signals and predicts wind speeds under various wind conditions via a feature selection strategy, improving environmental adaptability of UAVs. Test results show SymTAL outperforms other attitude stabilization algorithms in terms of learning efficiency and control precision, and POP exhibits excellent prediction accuracy under multiple wind conditions of continuous, intermittent and turbulent winds. Simulation experiments show that SymTAL-POP excels in trajectory tracking error, with mean reduction of 23.5% and root mean square error reduction of 55.2%.
-
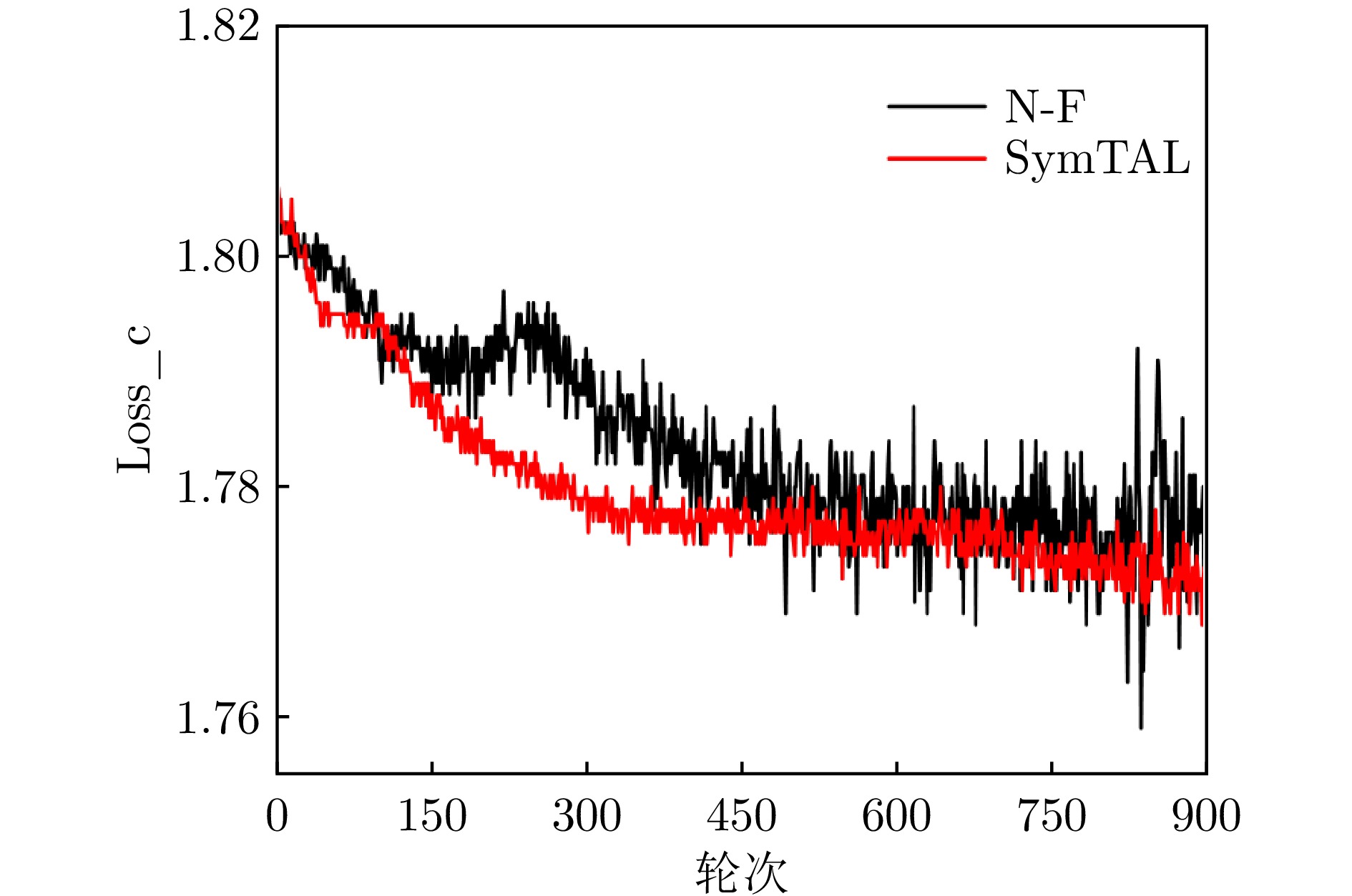
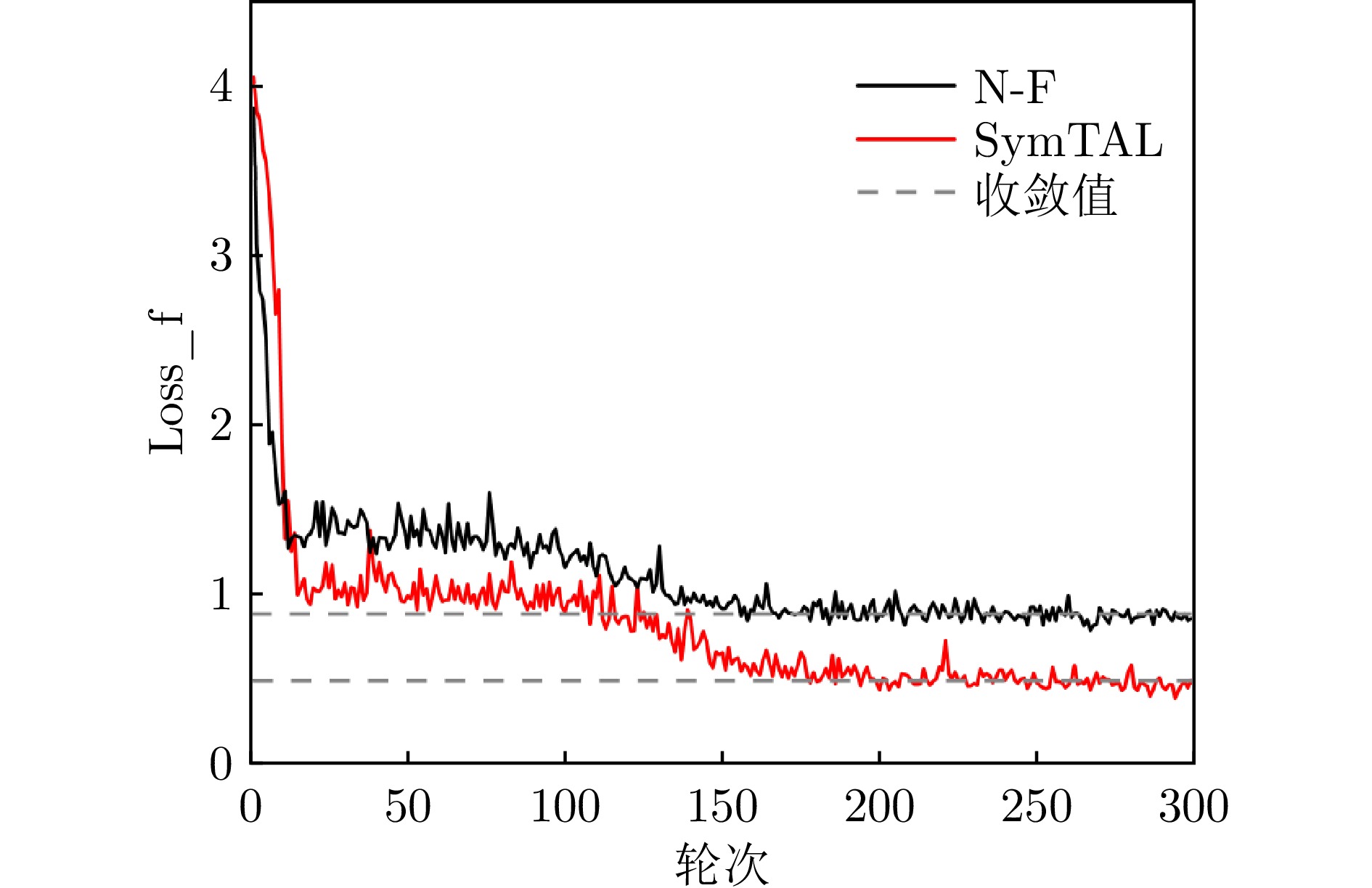
表 1 Loss_f值分析表
Table 1 Loss_f value analysis table
方法 收敛轮次 收敛值 运行时间 (s) Loss_f N-F 150 $ 0.863\;8 \pm 0.044 $ $ 149.2 \pm 1.37 $ SymTAL 160 $ 0.481\; 8 \pm 0.045 $ $ 116.6 \pm 1.15 $  下载: 导出CSV
下载: 导出CSV
表 2 连续风场算法性能比较
Table 2 Performance comparison of continuous wind field algorithms
评估指标 CNN-LSTM[40] VMD-AM-LSTM VMD-CNN[41] VMD-CNN-LSTM[42] VMD-GRU[43] VMD-LSTM VMD-TCN-LSTM POP MSE Mean 0.0653 0.0654 0.0596 0.0618 0.0625 0.0545 0.0616 0.0519 SD 0.0490 0.0490 0.0400 0.0420 0.0460 0.0390 0.0390 0.0280 MAE Mean 0.1999 0.2000 0.1914 0.1955 0.1954 0.1827 0.1954 0.1752 SD 0.0801 0.0804 0.0694 0.0727 0.0762 0.0673 0.0679 0.0508 RMSE Mean 0.2434 0.2435 0.2346 0.2384 0.2388 0.2243 0.2391 0.2194 SD 0.0780 0.0780 0.0670 0.0700 0.0740 0.0650 0.0660 0.0500 MAPE Mean 66.9373 66.1924 61.2980 61.0475 63.0942 51.9177 65.2285 56.0368 SD 23.0140 22.0060 17.5740 17.0630 19.8450 15.6650 19.3100 9.1550 MAXE Mean 0.6491 0.6416 0.6421 0.6444 0.6413 0.6418 0.6481 0.6106 SD 0.1120 0.1100 0.1100 0.1090 0.1090 0.1090 0.1051 0.0960 ARE Mean 0.6163 0.6441 0.6491 0.5558 0.6330 0.6340 0.6116 0.5406 SD 0.1810 0.2020 0.2110 0.0850 0.2020 0.2050 0.1540 0.0780
下载: 导出CSV
表 3 间歇风场算法性能比较
Table 3 Performance comparison of intermittent wind field algorithms
评估指标 CNN-LSTM[40] VMD-AM-LSTM VMD-CNN[41] VMD-CNN-LSTM[42] VMD-GRU[43] VMD-LSTM VMD-TCN-LSTM POP MSE Mean 0.0482 0.0514 0.0521 0.0465 0.0530 0.0497 0.0514 0.0449 SD 0.0220 0.0270 0.0340 0.0180 0.0230 0.0230 0.0180 0.0140 MAE Mean 0.1756 0.1723 0.1747 0.1712 0.1748 0.1703 0.1703 0.1574 SD 0.0461 0.0531 0.0569 0.0436 0.0448 0.0448 0.0375 0.0239 RMSE Mean 0.2242 0.2185 0.2216 0.2191 0.2256 0.2154 0.2231 0.1944 SD 0.0470 0.0500 0.0540 0.0440 0.0450 0.0450 0.0410 0.0150 MAPE Mean 66.3108 73.1167 72.4697 68.6956 64.5798 72.0918 59.1044 58.5418 SD 25.3310 32.7970 33.5990 26.1330 24.6470 30.2890 14.5280 12.1350 MAXE Mean 0.7156 0.6843 0.6926 0.7032 0.7355 0.7039 0.7537 0.6882 SD 0.1130 0.0970 0.1060 0.1070 0.1080 0.1040 0.1014 0.0630 ARE Mean 0.6843 0.7312 0.7343 0.6870 0.6744 0.7209 0.5910 0.5854 SD 0.2620 0.3280 0.3480 0.2610 0.2550 0.3030 0.1452 0.1210
下载: 导出CSV
表 4 湍流风场算法性能比较
Table 4 Performance comparison of turbulent wind field algorithms
评估指标 CNN-LSTM[40] VMD-AM-LSTM VMD-CNN[41] VMD-CNN-LSTM[42] VMD-GRU[43] VMD-LSTM VMD-TCN-LSTM POP MSE Mean 0.2799 0.2974 0.2760 0.2741 0.2943 0.2966 0.2966 $ {\boldsymbol{0 . 2 4 9 4}} $ SD 0.0950 0.0720 0.0740 0.0820 0.0720 0.0770 0.0770 $ {\boldsymbol{0 . 0 6 90}} $ MAE Mean 0.3963 0.4064 0.4072 0.3965 0.4083 0.4117 0.4038 $ {\boldsymbol{0 . 3 4 8 2}} $ SD 0.0605 0.0581 0.0611 0.0618 0.0616 0.0622 0.0631 $ {\boldsymbol{0 . 0 1 2 5}} $ RMSE Mean 0.5215 0.5283 0.5334 0.5085 0.5346 0.5337 0.5337 $ {\boldsymbol{0 . 4 7 4 2}} $ SD 0.0890 0.0670 0.0720 0.0780 0.0720 0.0730 0.0680 $ {\boldsymbol{0 . 0 4 60}} $ MAPE Mean — — — — — — — — SD — — — — — — — — MAXE Mean 0.8268 0.8610 0.8482 0.8261 0.8760 0.8774 0.8700 $ {\boldsymbol{0 . 7 6 1 4}} $ SD 0.1420 0.1240 0.1310 0.1440 0.1230 0.1300 0.1080 $ {\boldsymbol{0 . 0 7 10}} $ ARE Mean — — — — — — — — SD — — — — — — — —
下载: 导出CSV
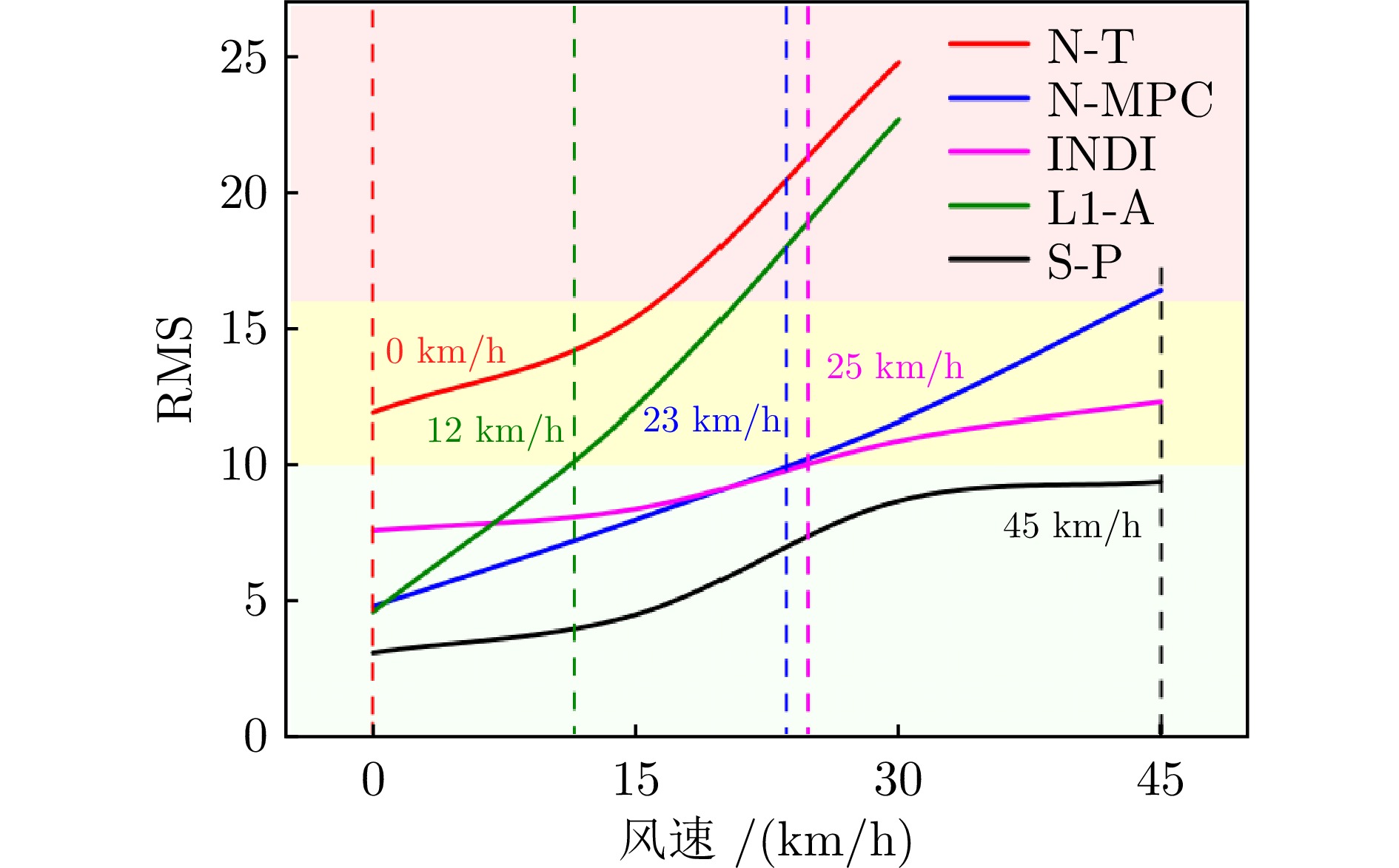
表 5 抗风算法的平均位置误差(cm)
Table 5 The average position error of wind resistance algorithm (cm)
风速 N-T N-MPC INDI L1-A S-P (km/h) Mean Mean Mean Mean Mean 0 10.8 4.5 6.8 4.2 2.9 15 13.6 7.6 8.1 11.1 4.1 30 22.6 11.3 10.3 21.4 8.7 45 34.7 16.7 12.6 28.6 8.9
下载: 导出CSV
表 6 抗风算法可控范围风速等级
Table 6 Wind resistance algorithm controllable range wind speed level
方法 无风
$ (0\sim1 $ 级)微风
$ (2\sim3 $ 级)劲风
$ (4\sim5 $级)强风
$ (>5 $级)N-T 中 差 差 中 N-MPC 优 优 中 差 INDI 优 优 中 中 L1-A 优 中 差 差 S-P 优 优 优 中
下载: 导出CSV
表 7 高度与风速的关系
Table 7 Relationship between height and wind speed
高度$ (\text{m}) $ 风速$ (\text{m} / \text{s}) $ 10 6.16 20 6.97 30 7.50 50 8.23 60 8.50 70 8.74 80 8.95 90 9.14 100 9.32 110 9.48 120 9.63
下载: 导出CSV
-
[1] Yang T T, Jiang Z, Sun R J, Cheng N, Feng H L. Maritime search and rescue based on group mobile computing for unmanned aerial vehicles and unmanned surface vehicles. IEEE Transactions on Industrial Informatics, 2020, 16(12): 7700−7708 [2] Zhang Y F, Lyu J B, Fu L Q. Energy-efficient trajectory design for UAV-aided maritime data collection in wind. IEEE Transactions on Wireless Communications, 2022, 21(12): 10871−10886 [3] Li J Q, Zhang G Q, Jiang C Y, Zhang W D. A survey of maritime unmanned search system: Theory, applications and future directions. Ocean Engineering, 2023, 285: Article No. 115359 [4] Lee J, Ryu S, Kim H J. Stable flight of a flapping wing micro air vehicle under wind disturbance. IEEE Robotics and Automation Letters, 2020, 5(4): 5685−5692 doi: 10.1109/LRA.2020.3009064 [5] Sorbelli F B, Corò F, Das S K, Pinotti C M. Energy-constrained delivery of goods with drones under varying wind conditions. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(9): 6048−6060 [6] Zhu H, Nie H, Zhang L M, Wei X H, Zhang M. Design and assessment of octocopter drones with improved aerodynamic efficiency and performance. Aerospace Science and Technology, 2020, 106: Article No. 106206 [7] Zuo Z Y, Liu C J, Han Q L, Song J W. Unmanned aerial vehicles: Control methods and future challenges. IEEE/CAA Journal of Automatica Sinica, 2022, 9(4): 601−614 [8] Hong D, Lee S, Cho Y H, Baek D, Kim J, Chang N. Energy-efficient online path planning of multiple drones using reinforcement learning. IEEE Transactions on Vehicular Technology, 2021, 70(10): 9725−9740 [9] 王诗章, 鲜斌, 杨森. 无人机吊挂飞行系统的减摆控制设计. 自动化学报, 2018, 44(10): 1771−1780Wang Shi-Zhang, Xian Bin, Yang Sen. Anti-swing controller design for an unmanned aerial vehicle with a slung-load. Acta Automatica Sinica, 2018, 44(10): 1771−1780 [10] 李繁飙, 杨皓月, 王鸿鑫, 阳春华, 廖力清. 基于干扰估计的非对称运动下飞机刹车系统模型预测控制. 自动化学报, 2022, 48(7): 1690−1703Li Fan-Biao, Yang Hao-Yue, Wang Hong-Xin, Yang Chun-Hua, Liao Li-Qing. Model predictive control of aircraft braking system under asymmetric motion based on disturbance estimation. Acta Automatica Sinica, 2022, 48(7): 1690−1703 [11] 李向阳, 哀薇, 田森平. 惯性串联系统的自抗扰控制. 自动化学报, 2018, 44(3): 562−568Li Xiang-Yang, Ai Wei, Tian Sen-Ping. Active disturbance rejection control of cascade inertia systems. Acta Automatica Sinica, 2018, 44(3): 562−568 [12] Sziroczak D, Rohacs D, Rohacs J. Review of using small UAV based meteorological measurements for road weather management. Progress in Aerospace Sciences, 2022, 134: Article No. 100859 [13] Xue J, Liu Z N, Liu G J, Zhou Z Y, Zhang K W, Tang Y, et al. Robust wind-resistant hovering control of quadrotor UAVs using deep reinforcement learning. IEEE Transactions on Intelligent Vehicles, DOI: 10.1109/TIV.2023.3324687 [14] Song Y L, Scaramuzza D. Policy search for model predictive control with application to agile drone flight. IEEE Transactions on Robotics, 2022, 38(4): 2114−2130 [15] Yan Y X, Chen X J, Shi M W, Li R. A decision support system architecture for intelligent driven unmanned aerial vehicles maritime search and rescue. In: Proceedings of the 10th International Symposium on System Security, Safety, and Reliability (ISSSR). Xiamen, China: IEEE, 2024. 424−428Yan Y X, Chen X J, Shi M W, Li R. A decision support system architecture for intelligent driven unmanned aerial vehicles maritime search and rescue. In: Proceedings of the 10th International Symposium on System Security, Safety, and Reliability (ISSSR). Xiamen, China: IEEE, 2024. 424−428 [16] Zha W T, Liu J, Li Y L, Liang Y Y. Ultra-short-term power forecast method for the wind farm based on feature selection and temporal convolution network. ISA Transactions, 2022, 129: 405−414 [17] Tagliabue A, Paris A, Kim S, Kubicek R, Bergbreiter S, How J P. Touch the wind: Simultaneous airflow, drag and interaction sensing on a multirotor. In: Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, USA: IEEE, 2020. 1645−1652 [18] Bisheban M, Lee T. Geometric adaptive control with neural networks for a quadrotor in wind fields. IEEE Transactions on Control Systems Technology, 2021, 29(4): 1533−1548 [19] Shi G Y, Hönig W, Shi X C, Yue Y S, Chung S J. Neural-swarm2: Planning and control of heterogeneous multirotor swarms using learned interactions. IEEE Transactions on Robotics, 2022, 38(2): 1063−1079 [20] O'Connell M, Shi G Y, Shi X C, Azizzadenesheli K, Anandkumar A, Yue Y S, et al. Neural fly enables rapid learning for agile flight in strong winds. Science Robotics, 2022, 7(66): Article No. eabm6597 [21] Sun Q X, Liu Y, Yang H L, Jiang Z H, Luan Z Z, Qian D P. Adaptive auto-tuning framework for global exploration of stencil optimization on GPUs. IEEE Transactions on Parallel and Distributed Systems, 2024, 35(1): 20−33 [22] Kim B, Chung K, Lee J, Seo J, Koo M W. A Bi-LSTM memory network for end-to-end goal-oriented dialog learning. Computer Speech & Language, 2019, 53: 217−230 [23] Ma C X, Dai G W, Zhou J B. Short-term traffic flow prediction for urban road sections based on time series analysis and LSTM_BILSTM method. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(6): 5615−5624 [24] Guo K, Wang N, Liu D T, Peng X Y. Uncertainty-aware LSTM based dynamic flight fault detection for UAV actuator. IEEE Transactions on Instrumentation and Measurement, 2023, 72: Article No. 3502113 [25] Samadianfard S, Hashemi S, Kargar K, Izadyar M, Mostafaeipour A, Mosavi A, et al. Wind speed prediction using a hybrid model of the multi-layer perceptron and whale optimization algorithm. Energy Reports, 2020, 6: 1147−1159 [26] Dhakal R, Yosfovand M, Prasai S, Sedai A, Pol S, Parameswaran S, et al. Deep learning model with probability density function and feature engineering for short term wind speed prediction. In: Proceedings of 2022 North American Power Symposium (NAPS). Salt Lake City, USA: IEEE, 2022. 1−6 [27] Filippini F, Lattuada M, Ciavotta M, Jahani A, Ardagna D, Amaldi E. A path relinking method for the joint online scheduling and capacity allocation of DL training workloads in GPU as a service systems. IEEE Transactions on Services Computing, 2023, 16(3): 1630−1646 [28] You Y, Li J, Reddi S, Hseu J, Kumar S, Bhojanapalli S, et al. Large batch optimization for deep learning: Training BERT in 76 minutes. In: Proceedings of the 8th International Conference on Learning Representations. Addis Ababa, Ethiopia: ICLR, 2020. 1−38 [29] Kingma D P, Ba J. Adam: A method for stochastic optimization. arXiv: 1412.6980, 2014. [30] Liu Y H, Wang H L, Fan J X, Wu J F, Wu T C. Control-oriented UAV highly feasible trajectory planning: A deep learning method. Aerospace Science and Technology, 2021, 110: Article No. 106435 [31] Ma T, Zhou H B, Qian B, Fu A Y. A large-scale clustering and 3D trajectory optimization approach for UAV swarms. Science China Information Sciences, 2021, 64: Article No. 140306 [32] Lv L L, Wu Z Y, Zhang J H, Zhang L, Tan Z Y, Tian Z H. A VMD and LSTM based hybrid model of load forecasting for power grid security. IEEE Transactions on Industrial Informatics, 2022, 18(9): 6474−6482 [33] Dudukcu H V, Taskiran M, Taskiran Z, Yildirim T. Temporal convolutional networks with RNN approach for chaotic time series prediction. Applied Soft Computing, 2023, 133: Article No. 109945 [34] Zhang K F, Cao H, Thé J, Yu H S. A hybrid model for multi-step coal price forecasting using decomposition technique and deep learning algorithms. Applied Energy, 2022, 306: Article No. 118011 [35] Zhang W, Jiang Y Y, Dong J Y, Song X J, Pang R B, Guoan B, et al. A deep learning method for real-time bias correction of wind field forecasts in the western North Pacific. Atmospheric Research, 2023, 284: Article No. 106586Zhang W, Jiang Y Y, Dong J Y, Song X J, Pang R B, Guoan B, et al. A deep learning method for real-time bias correction of wind field forecasts in the western North Pacific. Atmospheric Research, 2023, 284: Article No. 106586 [36] Bai S J, Kolter J Z, Koltun V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv preprint arXiv: 1803.01271, 2018. [37] Sikkel L, de Croon G, de Wagter C, Chu Q P. A novel online model-based wind estimation approach for quadrotor micro air vehicles using low cost MEMS IMUs. In: Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon, Korea (South): IEEE, 2016. 2141−2146 [38] Ganin Y, Ustinova E, Ajakan H, Germain P, Larochelle H, Laviolette F, et al. Domain-adversarial training of neural networks. Journal of Machine Learning Research, 2017, 17(1): 2096−2030 [39] Mandelbrot B B, Wallis J R. Robustness of the rescaled range R/S in the measurement of noncyclic long run statistical dependence. Water Resources Research, 1969, 5(5): 967−988 doi: 10.1029/WR005i005p00967 [40] Lu C X, Wang Z, Wu Z L, Zheng Y X, Liu Y X. Global ocean wind speed retrieval from GNSS reflectometry using CNN-LSTM network. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: Article No. 5801112 [41] He N, Yang Z Q, Qian C. A lithium-ion battery RUL prediction method based on improved variational modal decomposition and integrated depth model. In: Proceedings of the 35th Chinese Control and Decision Conference. Yichang, China: IEEE, 2023. 1268−1273 [42] Tao J J, Zhou J, Tao Y Q, Zhang H L, Jiang X, Hu Y Q. Time series updating forecasting method of energy consumption based on VMD-LSTM. In: Proceedings of 2021 IEEE Conference on Energy Internet and Energy System Integration (EI2). Taiyuan, China: IEEE, 2021. 3604−3609 [43] Wang K, Zhang H R, Wang X Y, Li Q Q. Prediction method of transformer top oil temperature based on VMD and GRU neural network. In: Proceedings of 2020 IEEE International Conference on High Voltage Engineering and Application (ICHVE). Beijing, China: IEEE, 2020. 1−4 [44] Gilbert E, Kolmanovsky I. Nonlinear tracking control in the presence of state and control constraints: A generalized reference governor. Automatica, 2002, 38(12): 2063−2073 doi: 10.1016/S0005-1098(02)00135-8 [45] Kamel M, Burri M, Siegwart R. Linear vs nonlinear MPC for trajectory tracking applied to rotary wing micro aerial vehicles. IFAC-PapersOnLine, 2017, 50(1): 3463−3469 doi: 10.1016/j.ifacol.2017.08.849 [46] Tal E, Karaman S. Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differential flatness. IEEE Transactions on Control Systems Technology, 2021, 29(3): 1203−1218 doi: 10.1109/TCST.2020.3001117 [47] Pravitra J, Ackerman K A, Cao C Y, Hovakimyan N, Theodorou E A. L1-adaptive MPPI architecture for robust and agile control of multirotors. In: Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Virtual Event: IEEE, 2020. 7661−7666Pravitra J, Ackerman K A, Cao C Y, Hovakimyan N, Theodorou E A. L1-adaptive MPPI architecture for robust and agile control of multirotors. In: Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Virtual Event: IEEE, 2020. 7661−7666 [48] Liu Y, Li S, Chan P W, Chen D. Empirical correction ratio and scale factor to project the extreme wind speed profile for offshore wind energy exploitation. IEEE Transactions on Sustainable Energy, 2018, 9(3): 1030−1040 doi: 10.1109/TSTE.2017.2759666 [49] Solano J C, Montaño T, Maldonado-Correa J, Ordóñez A, Pesantez M. Correlation between the wind speed and the elevation to evaluate the wind potential in the southern region of Ecuador. Energy Reports, 2021, 7: 259−268 doi: 10.1016/j.egyr.2021.06.044 -



计量
- 文章访问数: 276
- HTML全文浏览量: 229
- PDF下载量: 69
- 被引次数: 0
