

Heterogeneous Cooperative Fixed-time Prescribed Performance Evolution Control for Unmanned Aerial/Surface Vehicle
-
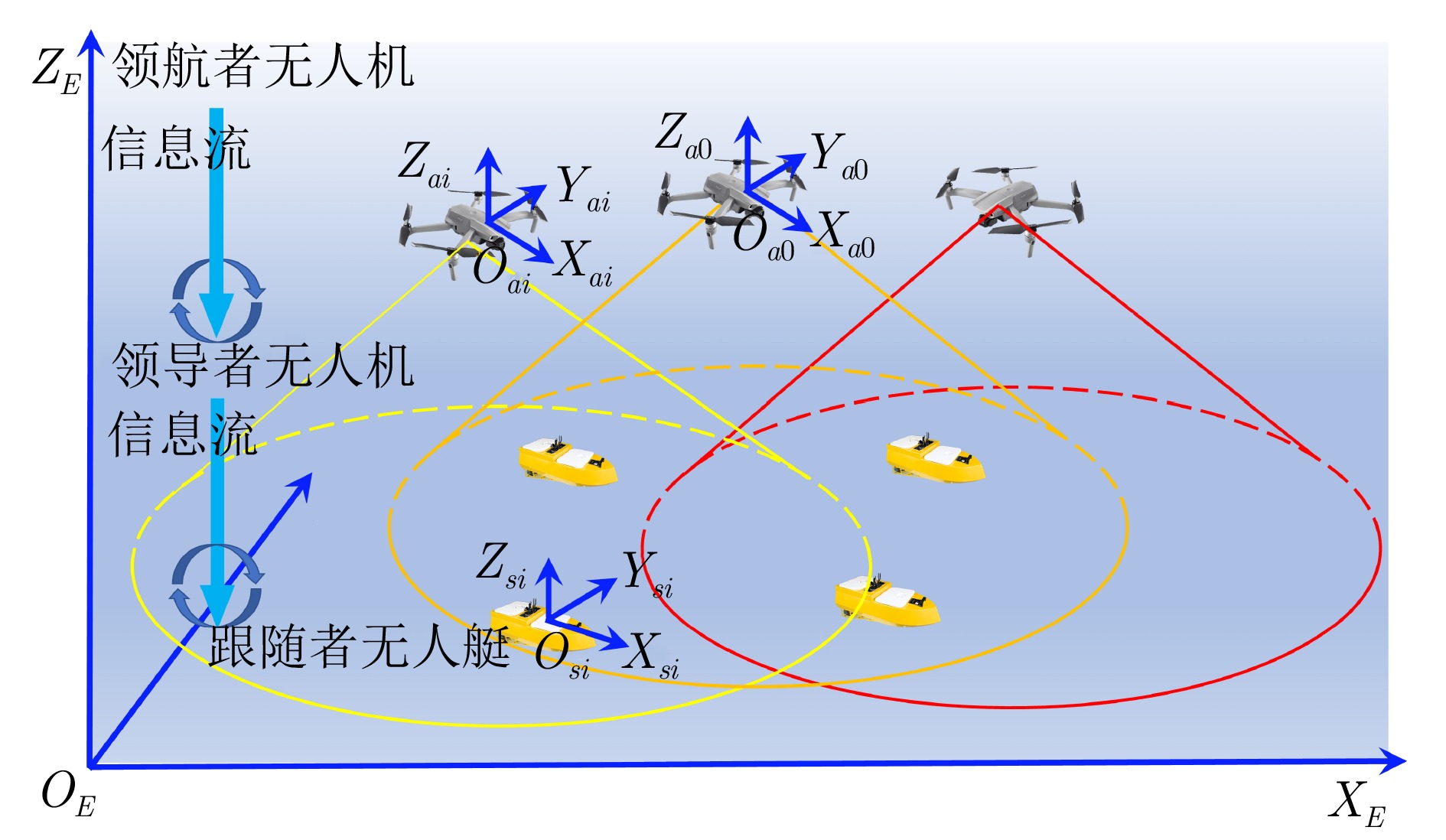
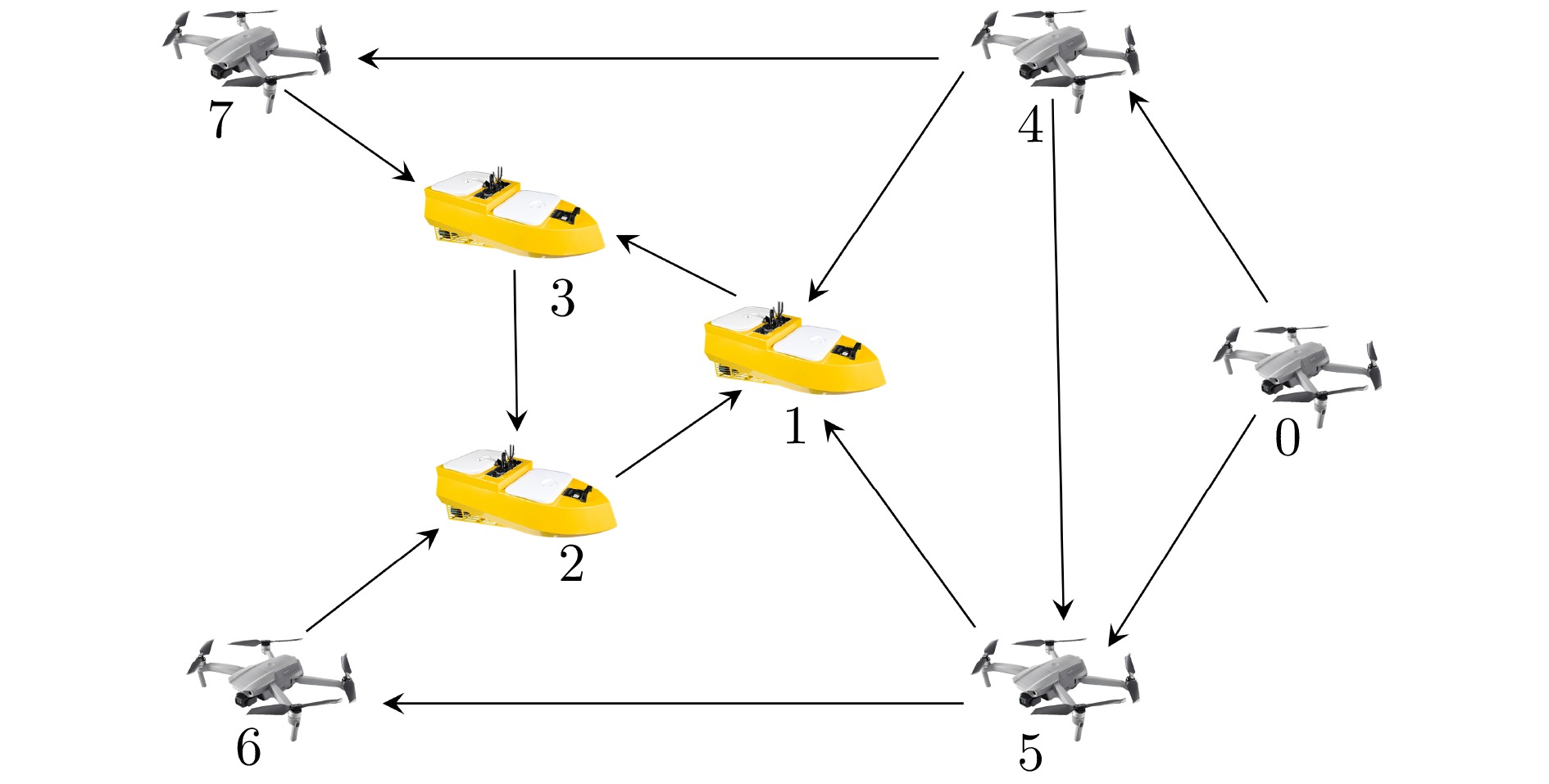
摘要: 针对执行器故障的无人机/无人艇(Unmanned aerial/surface vehicle, UAV/USV)异构协同系统编队包容控制问题, 提出一种固定时间预设性能演化控制方法. 为保证基于视觉测量的相对位置信号的连续性和准确性, 设计控制误差收敛的演化路径, 通过固定时间预设性能函数使误差限制在演化路径的邻域内, 并利用转换函数将受约束跟踪问题转换为无约束镇定问题. 采用动态面技术对转换后的误差动力学进行控制, 并利用干扰观测器和自适应技术对干扰和未知执行器故障进行估计. 通过 Lyapunov 函数证明误差动力学闭环系统所有信号都是最终一致有界的, 并进一步证明编队误差是固定时间稳定的, 数值仿真验证了所提方法的有效性.Abstract: A fixed-time prescribed performance evolution control method is proposed for the formation containment control problem of unmanned aerial/surface vehicle (UAV/USV) heterogeneous cooperative system with actuator faults. The evolution path for the control error convergence is designed to guarantee the continuity and accuracy of relative position signals based on visual measurement, and the error is limited to the neighborhood of the evolution path by the fixed-time prescribed performance function. The constrained tracking problem is transformed into an unconstrained stabilization problem by using the transformation function. The dynamic surface technology is used to control the transformed error dynamics, and the disturbance observer and adaptive technique are utilized to estimate the disturbance and the unknown actuator faults. It is proved that all signals of the closed-loop system of error dynamics are uniformly ultimately bounded by Lyapunov function, and it is further proved that the formation error is fixed-time stable. Numerical simulations verify the effectiveness of the proposed method.
-
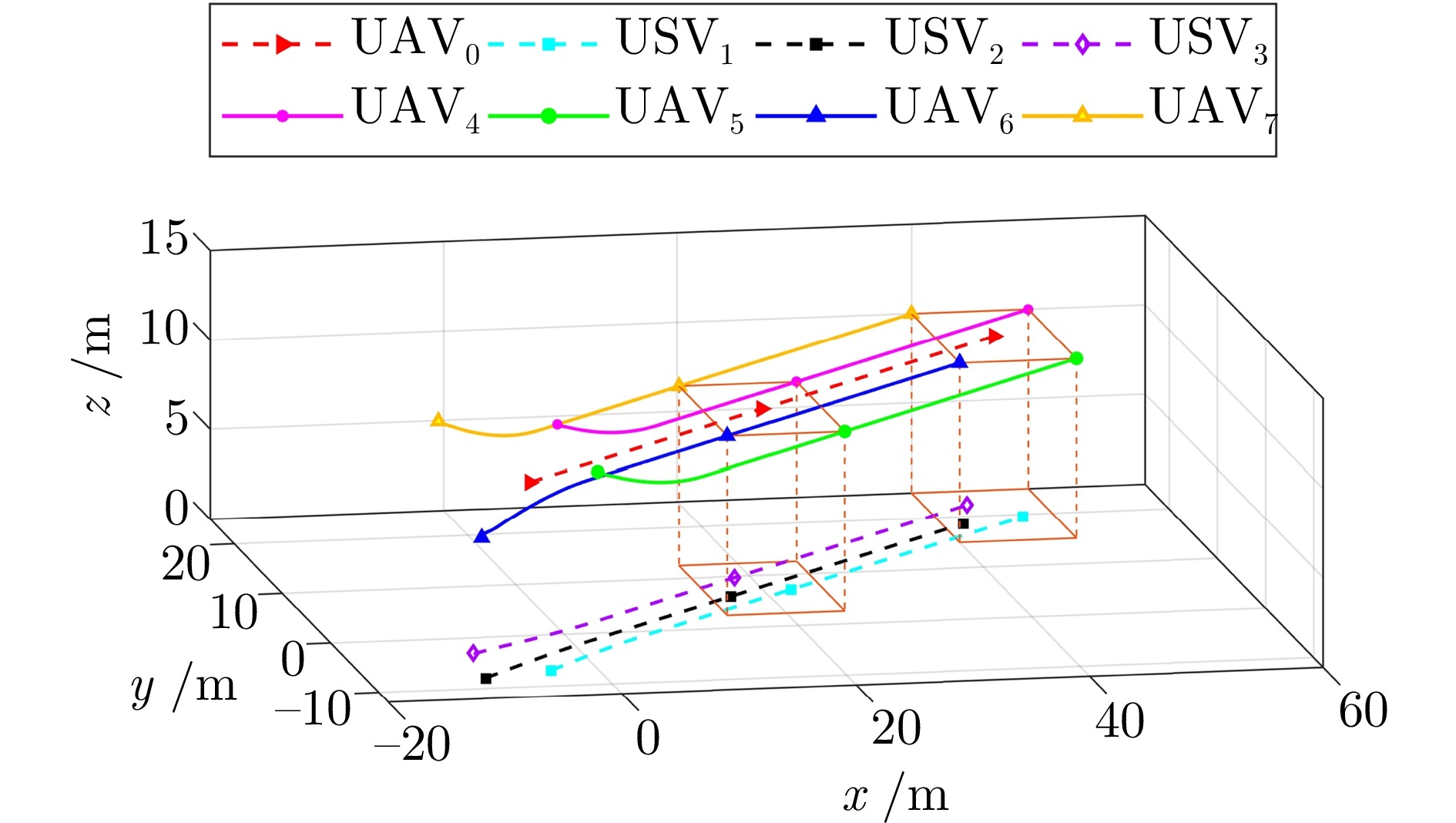
图 5 无人机/无人艇异构系统轨迹 (情况1)
Fig. 5 Trajectories of the UAV/USV heterogeneous system (Case 1)
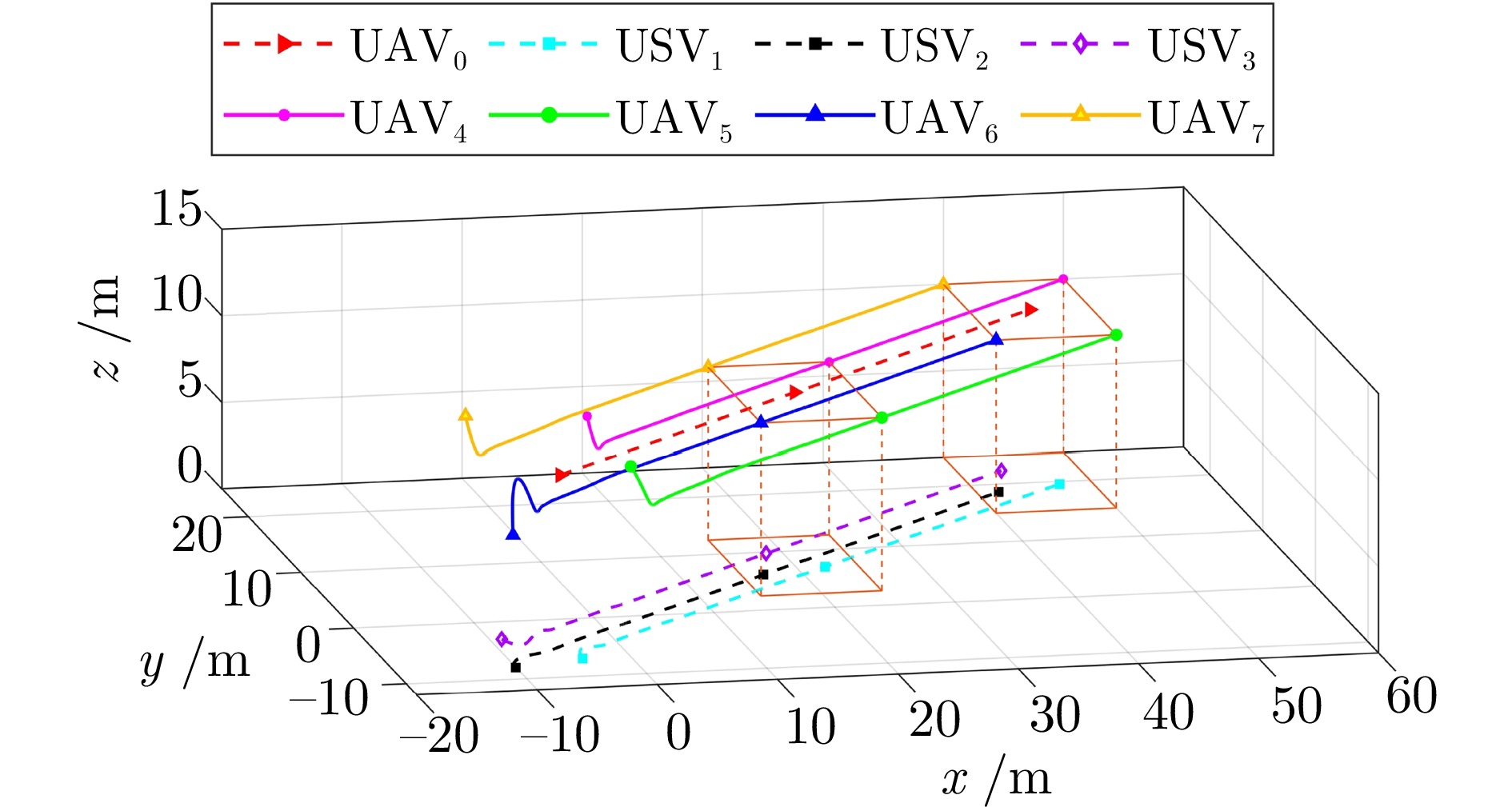
图 9 无人机/无人艇异构系统轨迹 (情况1对比实验)
Fig. 9 Trajectories of the UAV/USV heterogeneous system (Comparative experiment in case 1)
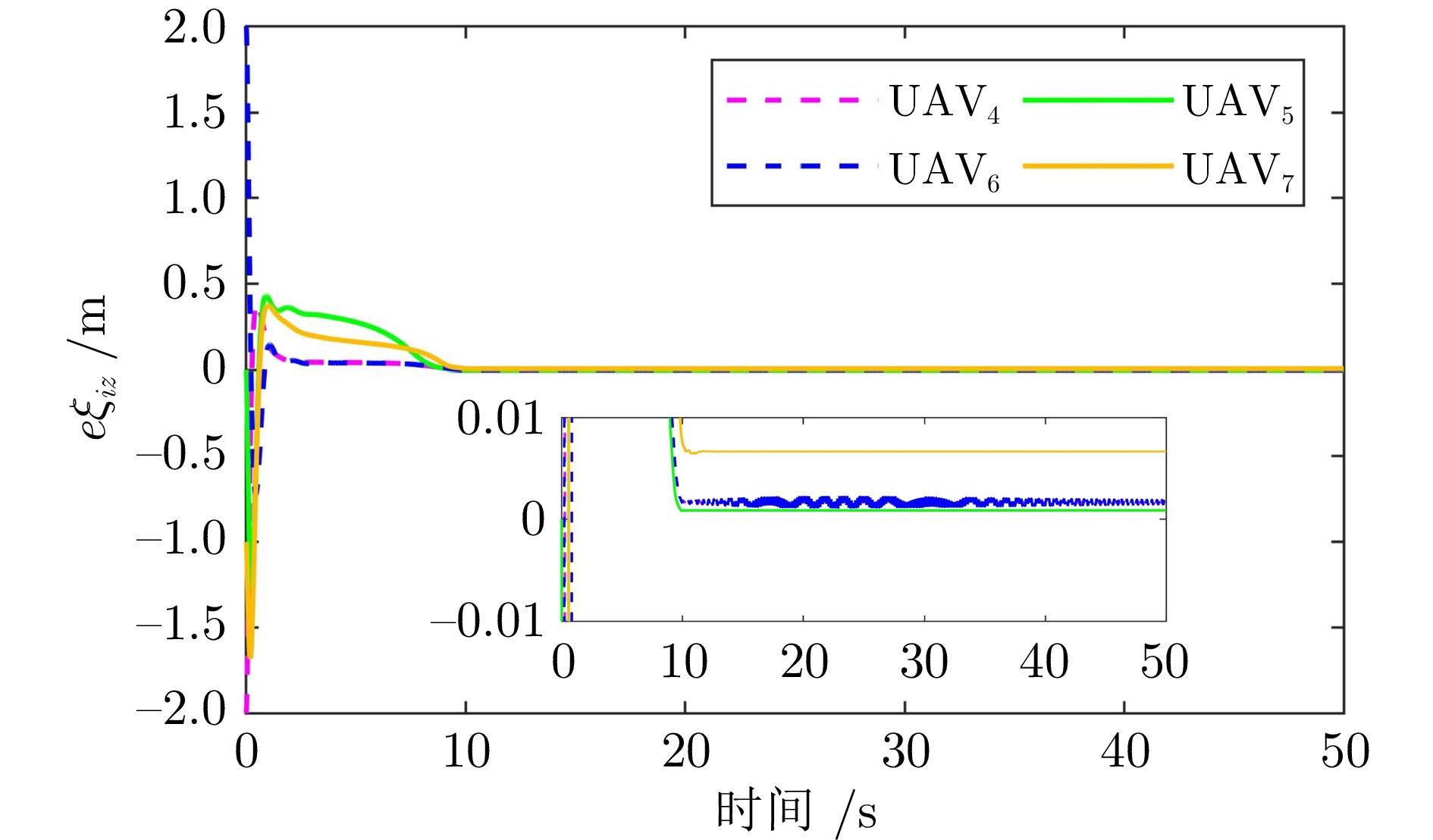
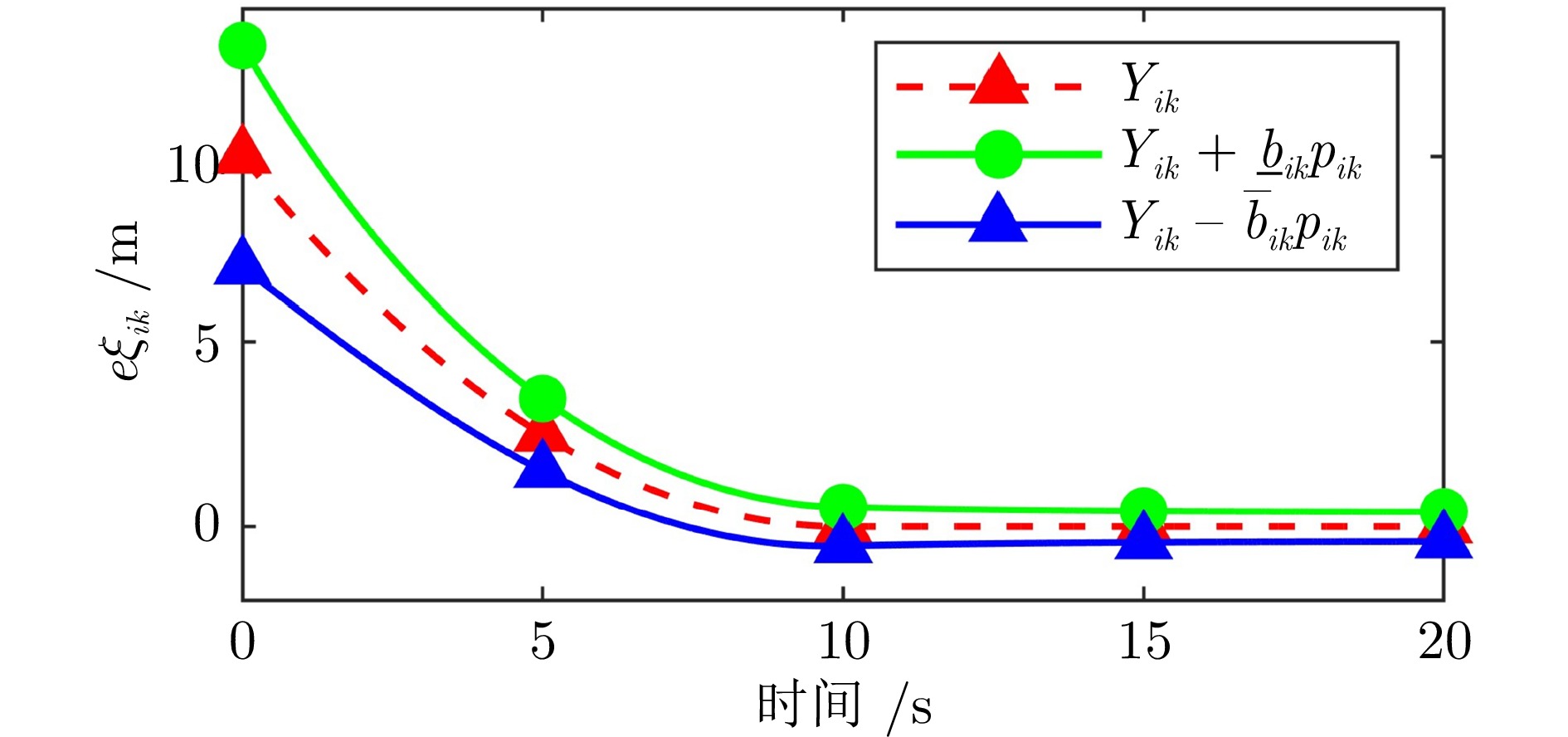
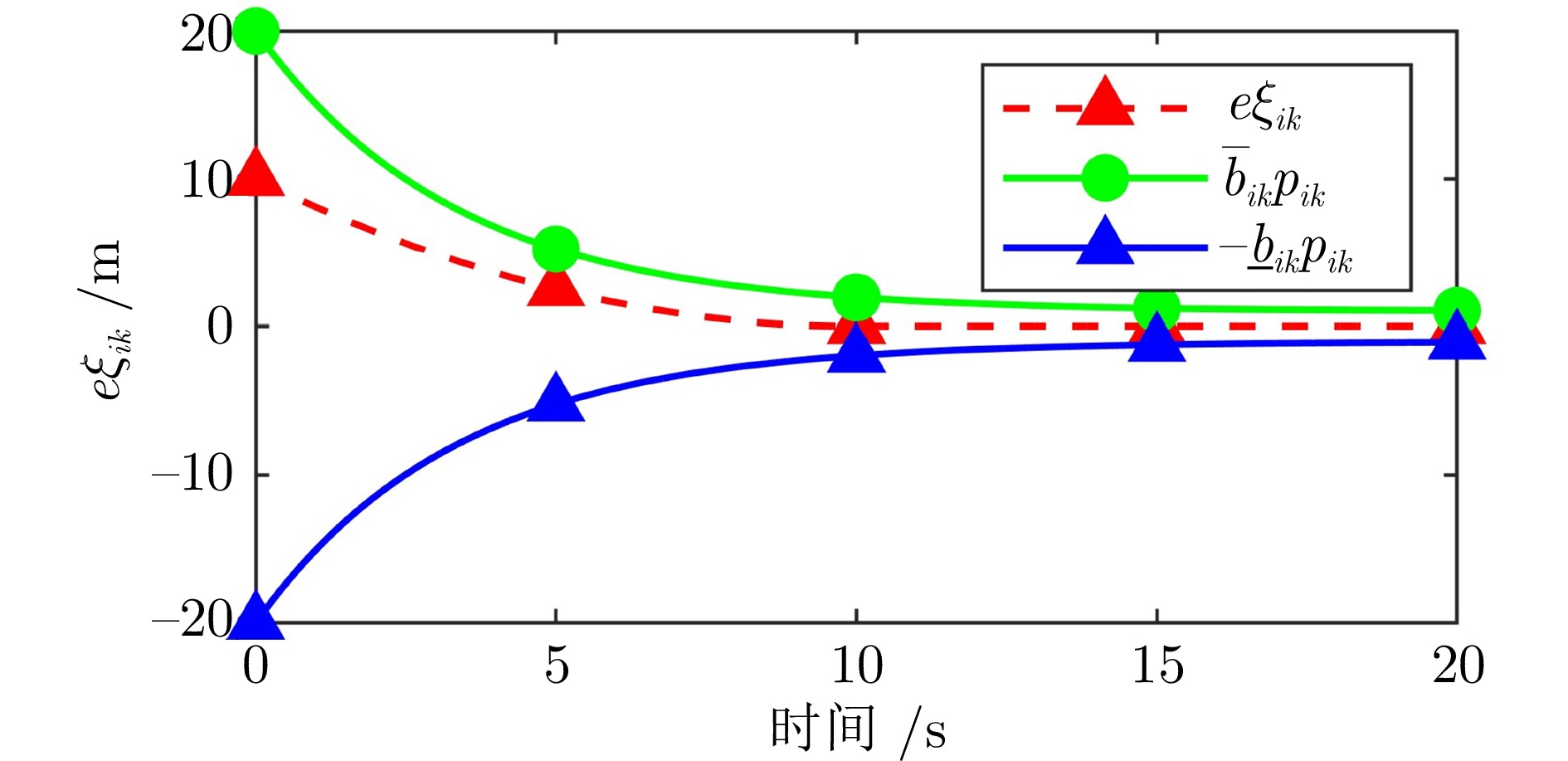
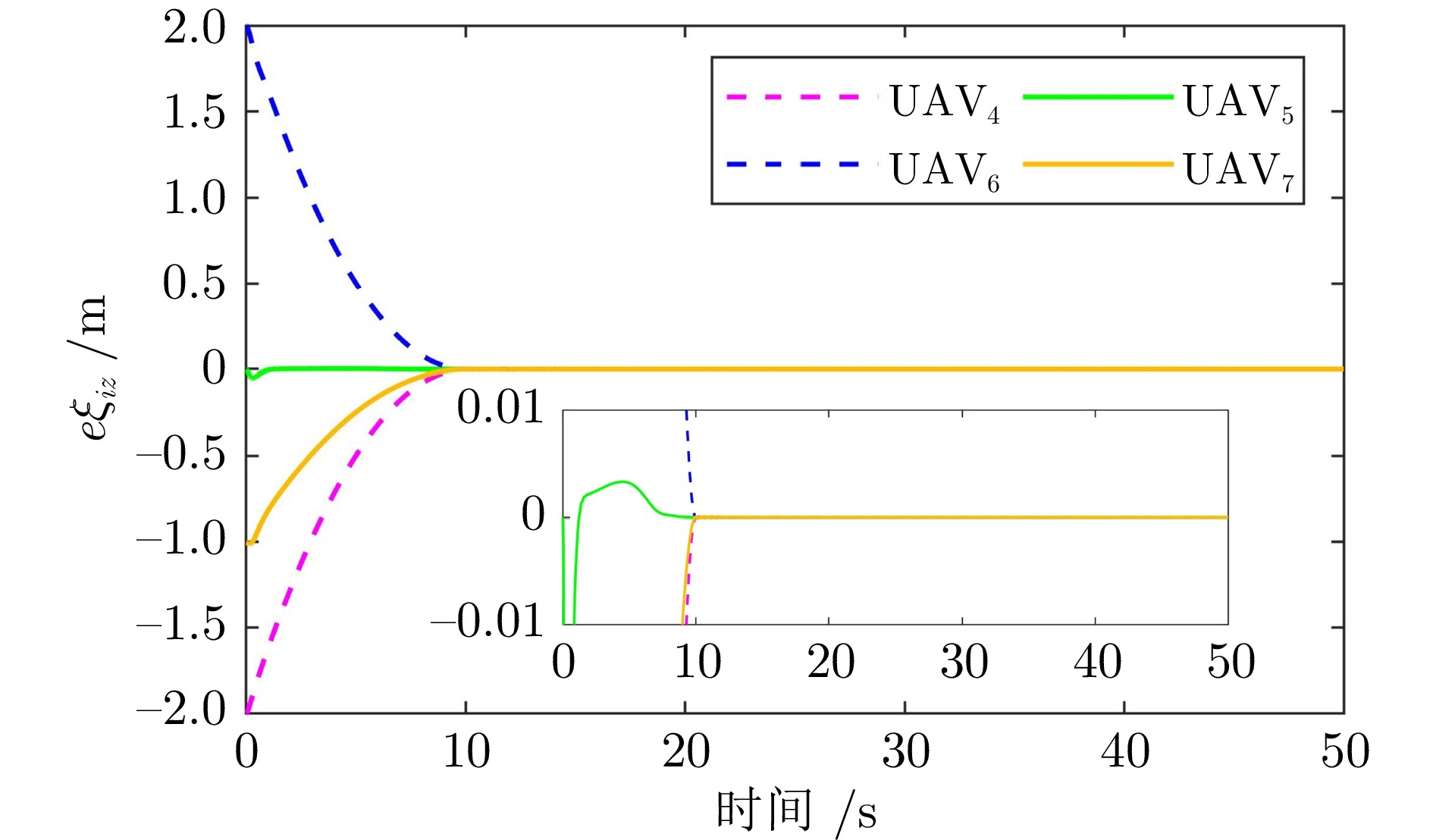
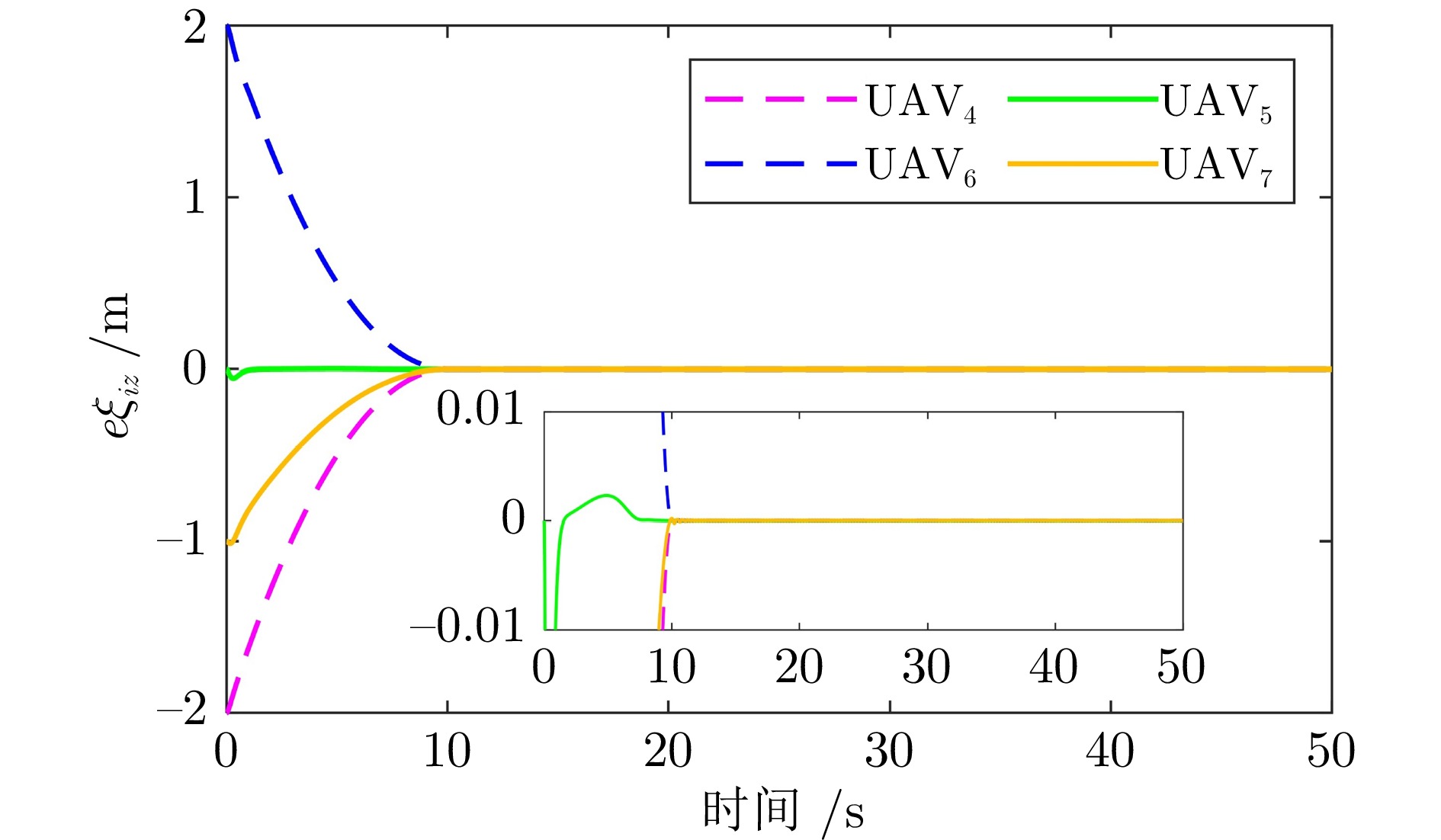
图 12 编队误差$e_{\xi i z}$ (情况1对比实验)
Fig. 12 Formation error $e_{\xi i z}$ (Comparative experiment in case 1)
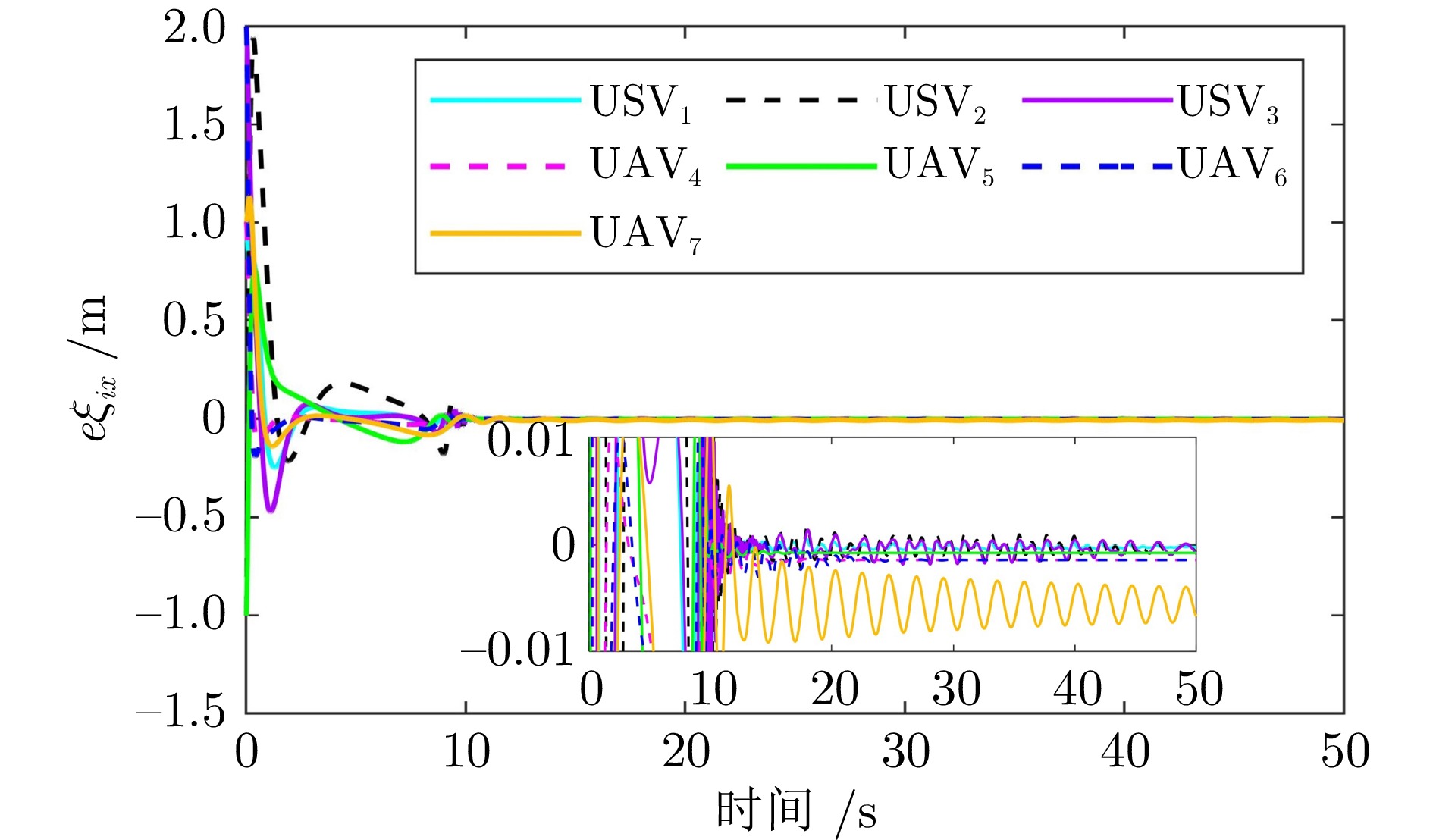
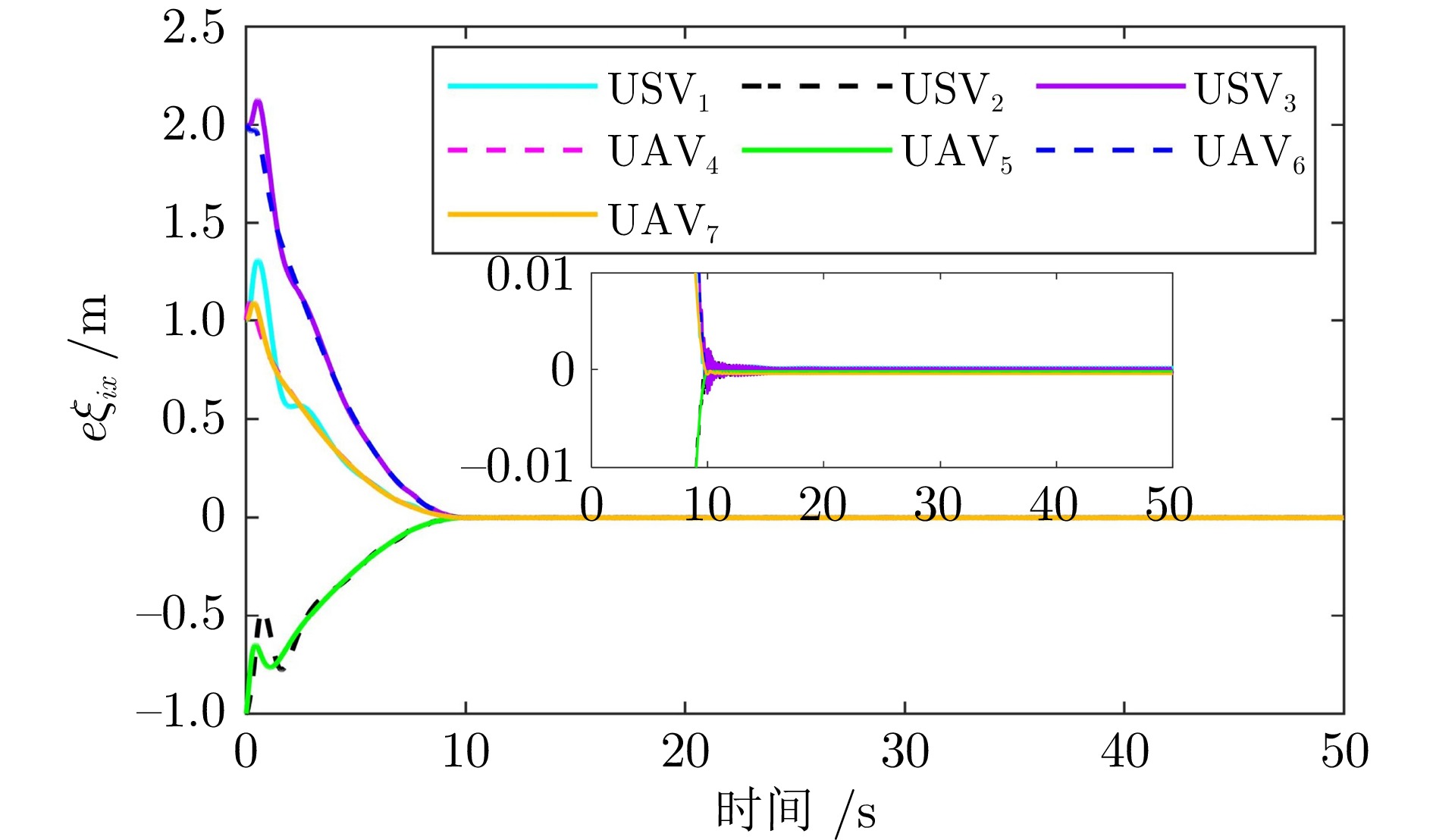
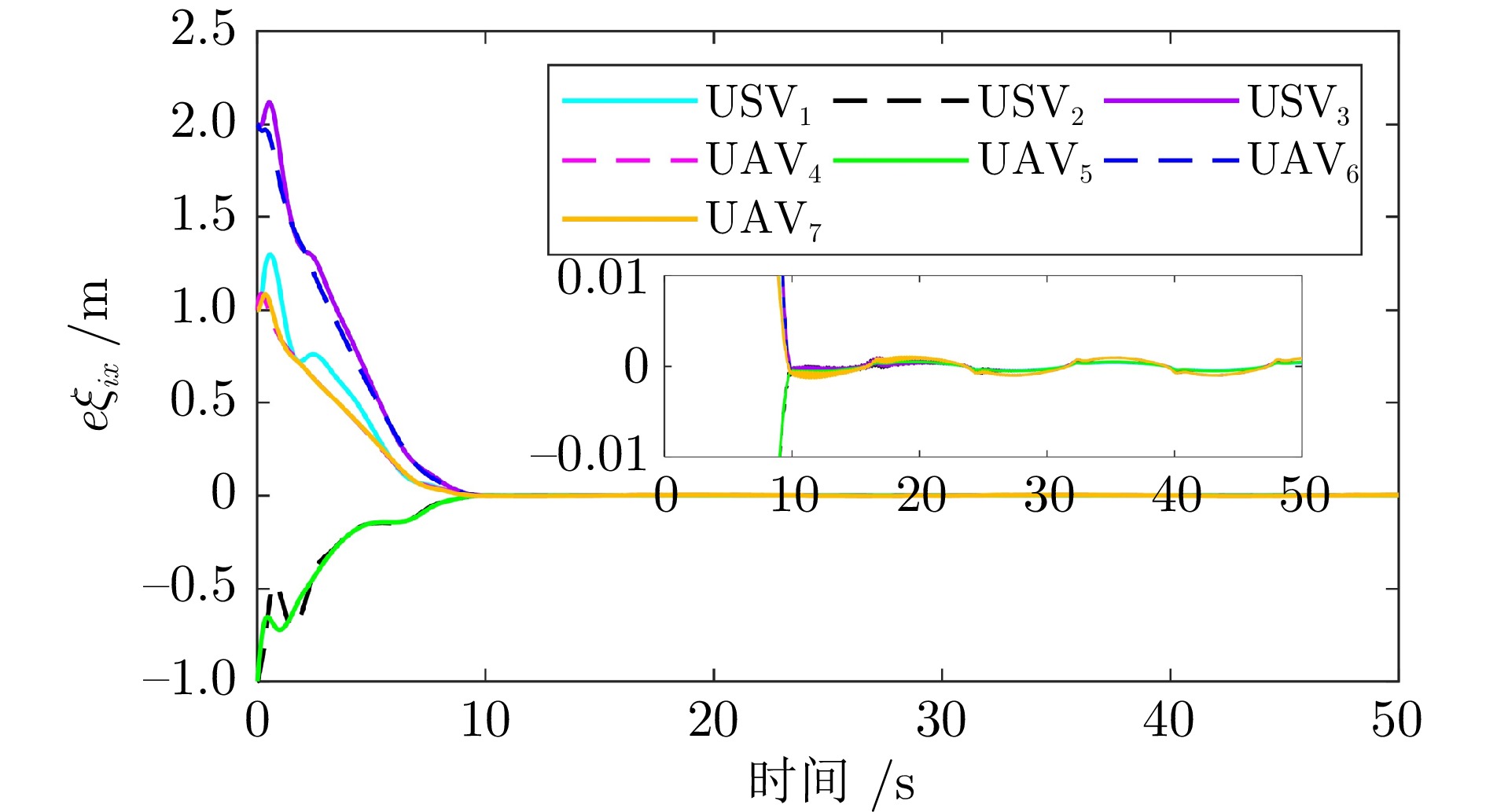
图 10 编队误差$e_{\xi i x}$ (情况1对比实验)
Fig. 10 Formation error $e_{\xi i x}$ (Comparative experiment in case 1)

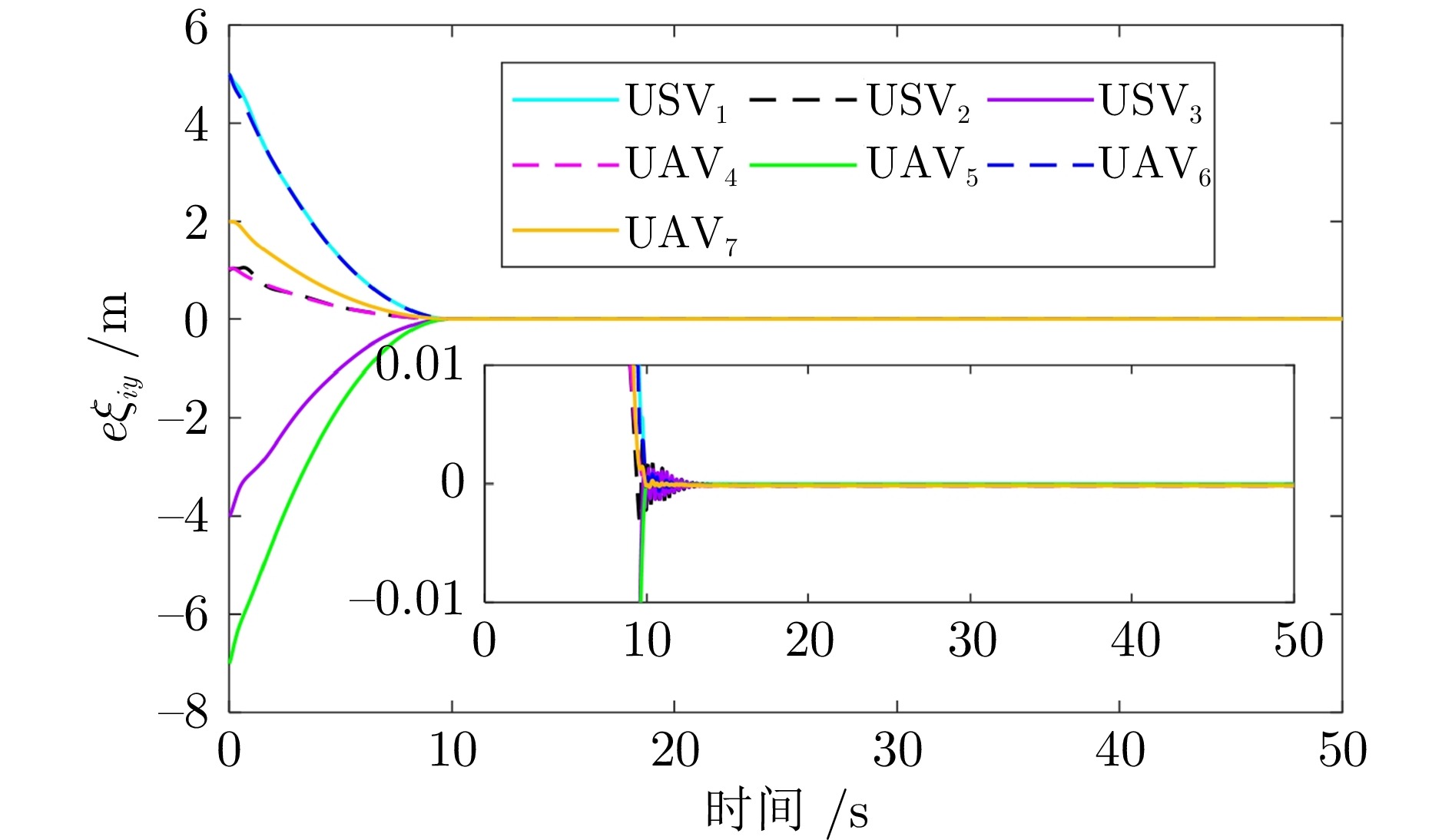
图 11 编队误差$e_{\xi i y}$ (情况1对比实验)
Fig. 11 Formation error $e_{\xi i y}$ (Comparative experiment in case 1)
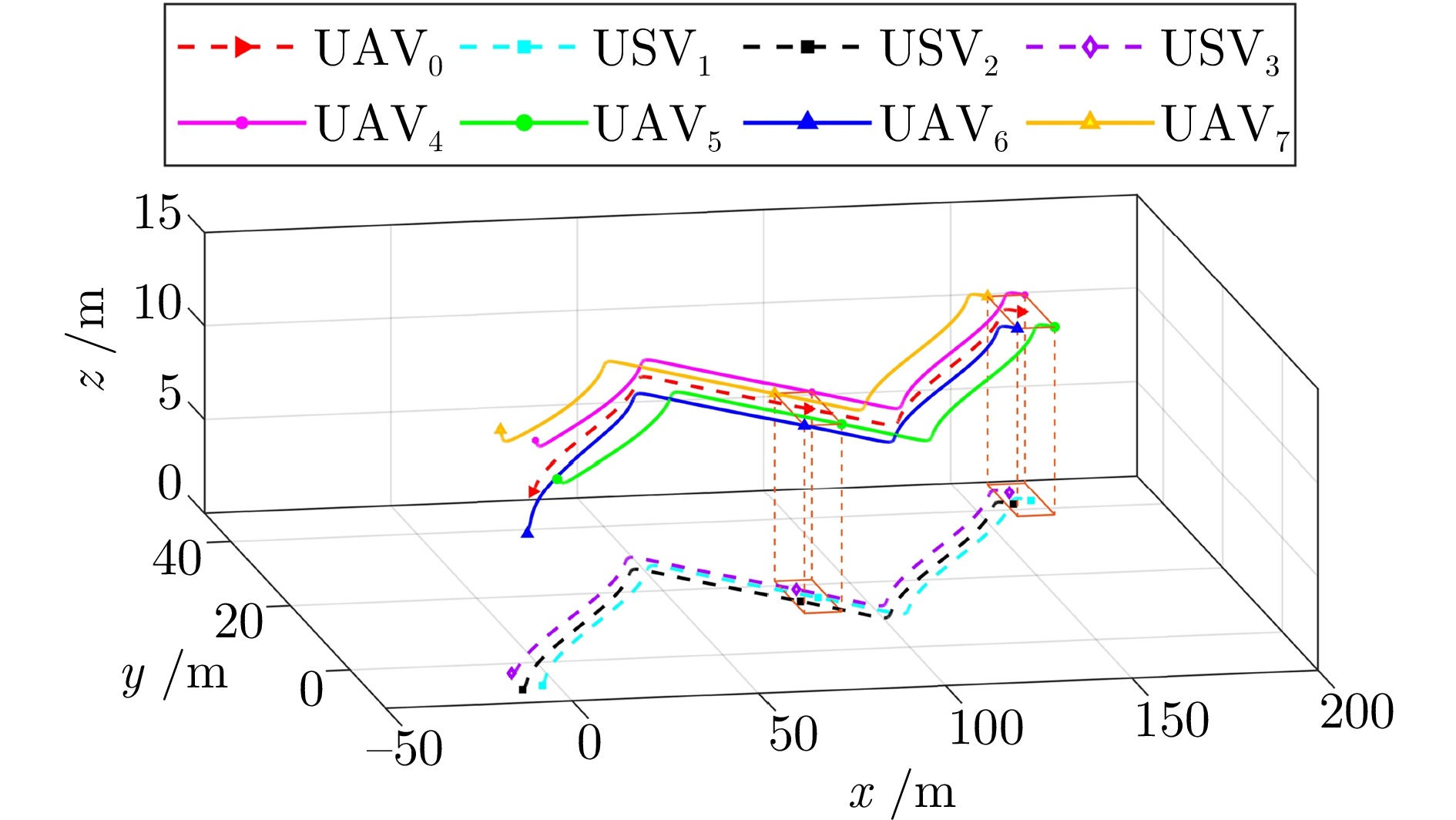
图 15 无人机/无人艇异构系统轨迹 (情况2)
Fig. 15 Trajectories of the UAV/USV heterogeneous system (Case 2)

图 19 无人机/无人艇异构系统轨迹 (情况2对比实验)
Fig. 19 Trajectories of the UAV/USV heterogeneous system (Comparative experiment in case 2)
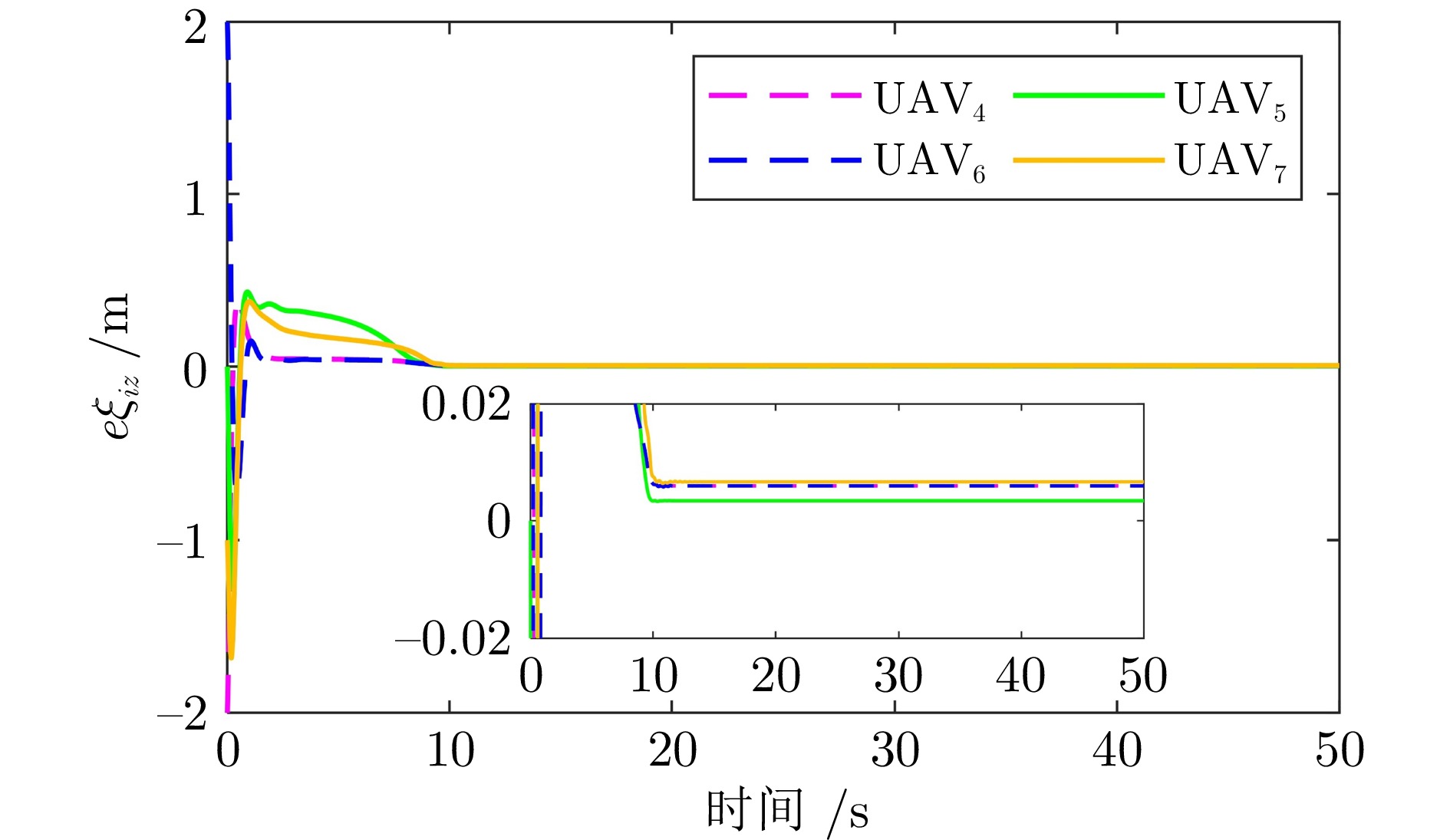
图 22 编队误差$e_{\xi i z}$ (情况2对比实验)
Fig. 22 Formation error $e_{\xi i z}$ (Comparative experiment in case 2)
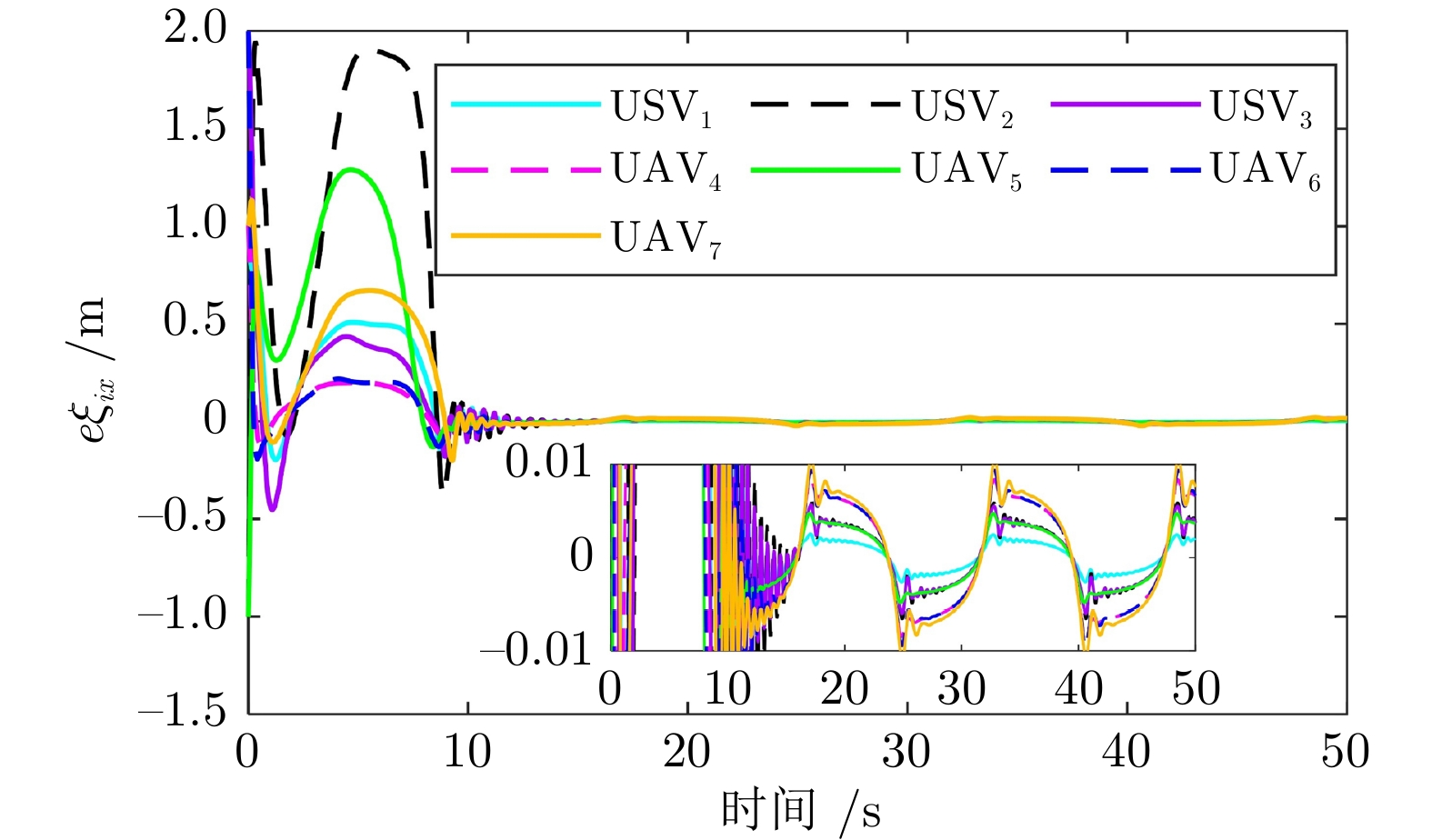
图 20 编队误差$e_{\xi i x}$ (情况2对比实验)
Fig. 20 Formation error $e_{\xi i x}$ (Comparative experiment in case 2)
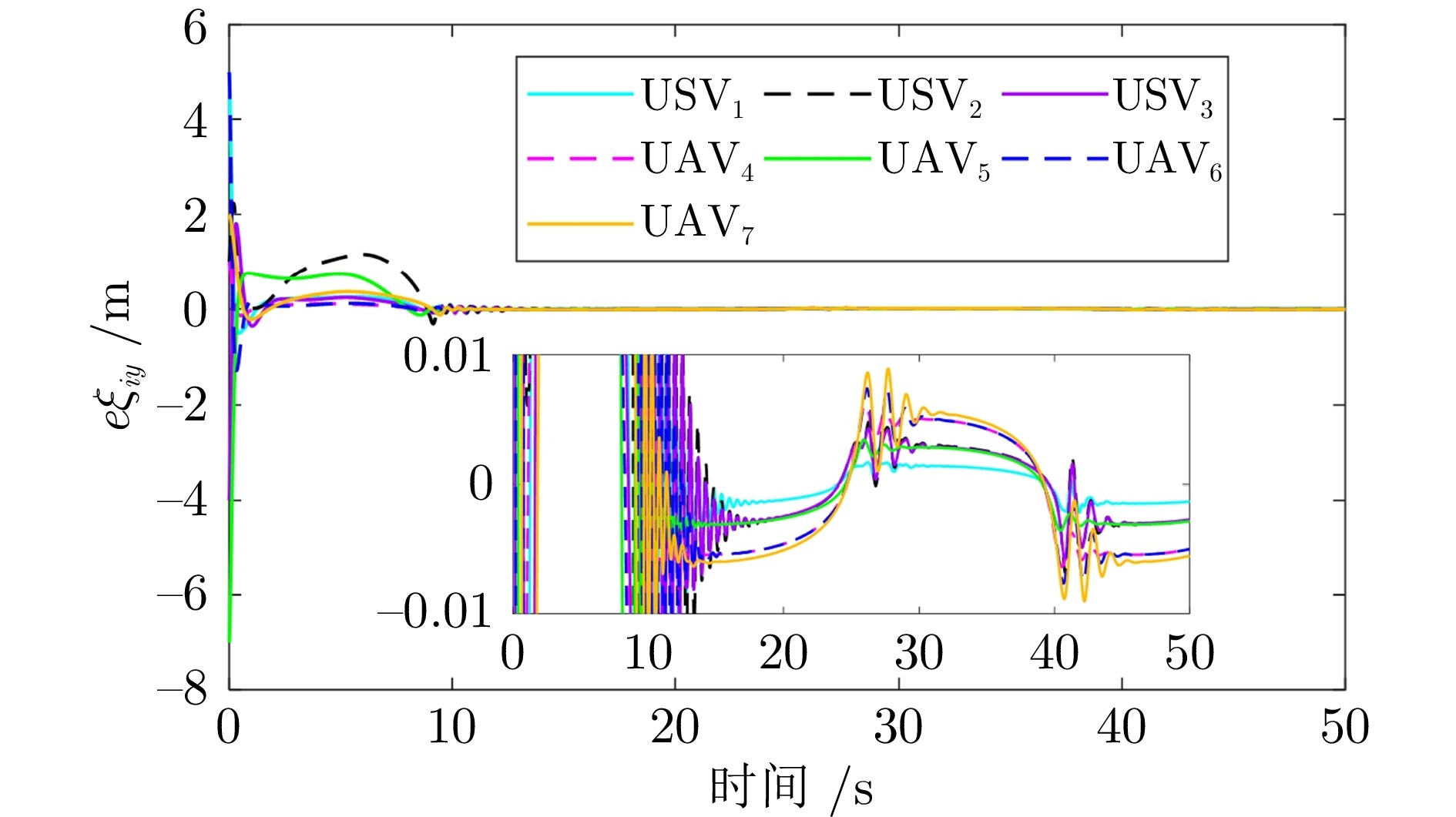
图 21 编队误差$e_{\xi i y}$ (情况2对比实验)
Fig. 21 Formation error $e_{\xi i y}$ (Comparative experiment in case 2)
-
[1] Cao W J, Liu L, Feng G. Distributed adaptive output consensus of unknown heterogeneous non-minimum phase multi-agent systems. IEEE/CAA Journal of Automatica Sinica, 2023, 10(4): 997−1008 doi: 10.1109/JAS.2023.123204 [2] 鞠锴, 冒泽慧, 姜斌, 马亚杰. 基于势博弈的异构多智能体系统任务分配和重分配. 自动化学报, 2022, 48(10): 2416−2428Ju Kai, Mao Ze-Hui, Jiang Bin, Ma Ya-Jie. Task allocation and reallocation for heterogeneous multiagent systems based on potential game. Acta Automatica Sinica, 2022, 48(10): 2416−2428 [3] Gong J Y, Ma Y J, Jiang B, Mao Z H. Fault-tolerant formation tracking control for heterogeneous multiagent systems with directed topology. Guidance, Navigation and Control, 2021, 1(1): Article No. 2150001 doi: 10.1142/S2737480721500011 [4] Li L, Wang S, Zhang Y, Song S, Wang C, Tan S, et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Science Robotics, 2022, 7(66): Article No. eabm6695 doi: 10.1126/scirobotics.abm6695 [5] Yuan Y, Xu X B, Duan H B, Zeng Z G, Xu D, Chen R, et al. Eagle vision-based coordinate landing control framework of unmanned aerial vehicles on an unmanned surface vehicle. Guidance, Navigation and Control, 2022, 2(4): Article No. 2250023 doi: 10.1142/S2737480722500236 [6] Li J Q, Zhang G Q, Jiang C Y, Zhang W D. A survey of maritime unmanned search system: Theory, applications and future directions. Ocean Engineering, 2023, 285: Article No. 115359 doi: 10.1016/j.oceaneng.2023.115359 [7] Gupta P M, Pairet E, Nascimento T, Saska M. Landing a UAV in harsh winds and turbulent open waters. IEEE Robotics and Automation Letters, 2023, 8(2): 744−751 doi: 10.1109/LRA.2022.3231831 [8] Yang T T, Jiang Z, Sun R, Cheng N, Feng H L. Maritime search and rescue based on group mobile computing for unmanned aerial vehicles and unmanned surface vehicles. IEEE Transactions on Industrial Informatics, 2020, 16(12): 7700−7708 doi: 10.1109/TII.2020.2974047 [9] Wu J, Li R, Li J, Zou M, Huang Z. Cooperative unmanned surface vehicles and unmanned aerial vehicles platform as a tool for coastal monitoring activities. Ocean & Coastal Management, 2023, 232: Article No. 106421 [10] Yoon S, Do H, Kim J. Collaborative mission and route planning of multi-vehicle systems for autonomous search in marine environment. International Journal of Control, Automation and Systems, 2020, 18(3): 546−555 doi: 10.1007/s12555-019-0666-4 [11] 白嘉琪, 王彦恺, 邢昊. 无人艇与四旋翼无人机固定时间异构编队控制. 系统工程与电子技术, 2023, 45(4): 1152−1163 doi: 10.12305/j.issn.1001-506X.2023.04.24Bai Jia-Qi, Wang Yan-Kai, Xing Hao. Fixed-time heterogeneous formation control of unmannedboats and quadrotor unmanned aerial vehicle. Systems Engineering and Electronics, 2023, 45(4): 1152−1163 doi: 10.12305/j.issn.1001-506X.2023.04.24 [12] Li H, Li X. Distributed consensus of heterogeneous linear time-varying systems on UAVs-USVs coordination. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(7): 1264−1268 [13] Huang D, Li H, Li X. Formation of generic UAVs-USVs system under distributed model predictive control scheme. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(12): 3123−3127 [14] Liu H, Weng P, Tian X, Mai Q. Distributed adaptive fixed-time formation control for UAV-USV heterogeneous multi-agent systems. Ocean Engineering, 2023, 267: Article No. 113240 doi: 10.1016/j.oceaneng.2022.113240 [15] Yang X, Wang W, Huang P. Distributed optimal consensus with obstacle avoidance algorithm of mixed-order UAVs-USVs-UUVs systems. ISA Transactions, 2020, 107: 270−286 doi: 10.1016/j.isatra.2020.07.028 [16] Zhu Y, Li S, Guo G, Yuan P, Bai J. Formation control of UAV-USV based on distributed event-triggered adaptive MPC with virtual trajectory restriction. Ocean Engineering, 2024, 294: Article No. 116850 doi: 10.1016/j.oceaneng.2024.116850 [17] Ghommam J, Iftekhar L, Rahman M H, Saad M. Cooperative learning-based practical formation-containment control with prescribed performance for heterogeneous clusters of UAV/USV. Asian Journal of Control, DOI: 10.1002/asjc.3480 [18] Gong J Y, Jiang B, Ma Y J, Mao Z H. Distributed adaptive fault-tolerant formation-containment control with prescribed performance for heterogeneous multiagent systems. IEEE Transactions on Cybernetics, 2023, 53(12): 7787−7799 doi: 10.1109/TCYB.2022.3218377 [19] Han D K, Panagou D. Robust multitask formation control via parametric Lyapunov-like barrier functions. IEEE Transactions on Automatic Control, 2019, 64(11): 2019−4453 [20] Lindemann L, Dimarogonas D V. Barrier function based collaborative control of multiple robots under signal temporal logic tasks. IEEE Transactions on Control of Network Systems, 2020, 7(4): 1916−1928 doi: 10.1109/TCNS.2020.3014602 [21] 蔡光斌, 肖永强, 胡昌华, 杨小冈, 凡永华. 基于全驱系统方法的高阶严反馈系统时变输出约束控制. 自动化学报, 2024, 50(2): 372−385Cai Guang-Bin, Xiao Yong-Qiang, Hu Chang-Hua, Yang Xiao-Gang, Fan Yong-Hua. Time-varying output constraint control of high-order strict-feedback systems based on fully actuated system approach. Acta Automatica Sinica, 2024, 50(2): 372−385 [22] Cheng W L, Zhang K, Jiang B. Fixed-time fault-tolerant formation control for a cooperative heterogeneous multiagent system with prescribed performance. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(1): 462−474 doi: 10.1109/TSMC.2022.3186382 [23] Li B, Gong W Q, Yang Y S, Xiao B. Distributed fixed-time leader-following formation control for multi-quadrotors with prescribed performance and collision avoidance. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 7281−7294 [24] Ma C, Dong D B. Finite-time prescribed performance time-varying formation control for second-order multi-agent systems with non-strict feedback based on a neural network observer. IEEE/CAA Journal of Automatica Sinica, DOI: 10.1109/JAS.2023.123615 [25] Guo X G, Xu W, Wang J L, Park J H, Yan H C. BLF-based neuroadaptive fault-tolerant control for nonlinear vehicular platoon with time-varying fault directions and distance restrictions. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 12388−12398 doi: 10.1109/TITS.2021.3113928 [26] 陈杰, 吕梓亮, 黄鑫源, 洪奕光. 非线性系统的安全分析与控制: 障碍函数方法. 自动化学报, 2023, 49(3): 567−579Chen Jie, Lyu Zi-Liang, Huang Xin-Yuan, Hong Yi-Guang. Safety analysis and safety-critical control of nonlinear systems: Barrier function approach. Acta Automatica Sinica, 2023, 49(3): 567−579 [27] Bechlioulis C P, Rovithakis G A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Transactions on Automatic Control, 2008, 53(9): 2090−2099 doi: 10.1109/TAC.2008.929402 [28] Duan H B, Yuan Y, Zeng Z G. Distributed robust learning control for multiple unmanned surface vessels with fixed-time prescribed performance. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024, 54(2): 787−799 doi: 10.1109/TSMC.2023.3321119 [29] Qin J, Zhang G, Zheng W X, Kang Y. Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults. IEEE Transactions on Cybernetics, 2019, 49(5): 1605−1615 doi: 10.1109/TCYB.2018.2805167 [30] Yu Z Q, Qu Y H, Zhang Y M. Distributed fault-tolerant cooperative control for multi-UAVs under actuator fault and input saturation. IEEE Transactions on Control Systems Technology, 2019, 27(6): 2417−2429 doi: 10.1109/TCST.2018.2868038 [31] Cheng W L, Zhang K, Jiang B, Ding S X. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Transactions on Circuits and Systems I: Regular Papers, 2021, 68(5): 2121−2133 doi: 10.1109/TCSI.2021.3061386 [32] Zheng Z W, Sun L, Xie L H. Error-constrained LOS path following of a surface vessel with actuator saturation and faults. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(10): 1794−1805 doi: 10.1109/TSMC.2017.2717850 [33] Rahimi R, Abdollahi F, Naqshi K. Time-varying formation control of a collaborative heterogeneous multi agent system. Robotics and Autonomous Systems, 2014, 62: 1799−1805 doi: 10.1016/j.robot.2014.07.005 [34] Li J Z, Ren W, Xu S Y. Distributed containment control with multiple dynamic leaders for double-integrator dynamics using only position measurements. IEEE Transactions on Automatic Control, 2012, 57(6): 1553−1559 doi: 10.1109/TAC.2011.2174680 [35] Samosir A S, Yatim A. Implementation of dynamic evolution control of bidirectional DC-DC converter for interfacing ultracapacitor energy storage to fuel-cell system. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3468−3473 doi: 10.1109/TIE.2009.2039458 [36] Hua C C, Ning P J, Li K, Guan X P. Fixed-time prescribed tracking control for stochastic nonlinear systems with unknown measurement sensitivity. IEEE Transactions on Cybernetics, 2022, 52(5): 3722−3732 doi: 10.1109/TCYB.2020.3012560 -

 下载:
下载:


计量
- 文章访问数: 180
- HTML全文浏览量: 97
- 被引次数: 0
