

-
摘要: 针对战机大迎角动力学呈现的强非线性、气动不确定和通道耦合特性, 提出了一种基于智能学习的自适应机动跟踪控制方法. 通过将通道耦合视为集总扰动的一部分, 把模型分解为迎角子系统、侧滑角子系统和滚转角速率子系统. 采用神经网络估计不确定, 设计跟踪误差反馈与集总干扰估计前馈相结合的控制器获取期望操纵力矩, 并基于串接链分配方法求解气动舵偏角和推力矢量偏角. 对于神经网络权重更新, 构建预测误差表征集总干扰的估计性能, 结合跟踪误差设计复合学习更新律. 基于李雅普诺夫方法证明了闭环系统的一致最终有界稳定性. 针对眼镜蛇机动和赫伯斯特机动指令进行了仿真验证和抗干扰参数拉偏测试, 结果表明所提方法具有较高的机动指令跟踪精度和鲁棒性能.Abstract: Considering the strong nonlinearity, aerodynamic uncertainty and channel coupling characteristics of fighter dynamics at high angle of attack, an adaptive maneuver tracking control is proposed based on intelligent learning. By taking the channel coupling into a part of the total disturbance, the model is decomposed into the angle of attack subsystem, the sideslip angle subsystem and the roll angle rate subsystem. Neural networks are used to estimate aerodynamic uncertainties, and the controllers using tracking error feedback and total disturbance estimation feed-forward are designed to obtain the desired control torque. Then the aerodynamic surface deflection and thrust vector deflection are calculated based on daisy chain method. For the neural network weight update, the prediction error is constructed to reflect the estimation performance of the total disturbance, and the composite learning update law is designed combining with the tracking error. The uniformly ultimate boundedness of the closed-loop system is proved based on the Lyapunov method. Simulation and anti-disturbance parameter deviation tests are carried out for the Cobra and Herbst maneuvers, and the results show that the proposed method presents high tracking accuracy and more robust performance.
-
Key words:
- Fighter /
- high angle of attack maneuver /
- composite learning /
- adaptive control /
- control allocation
-
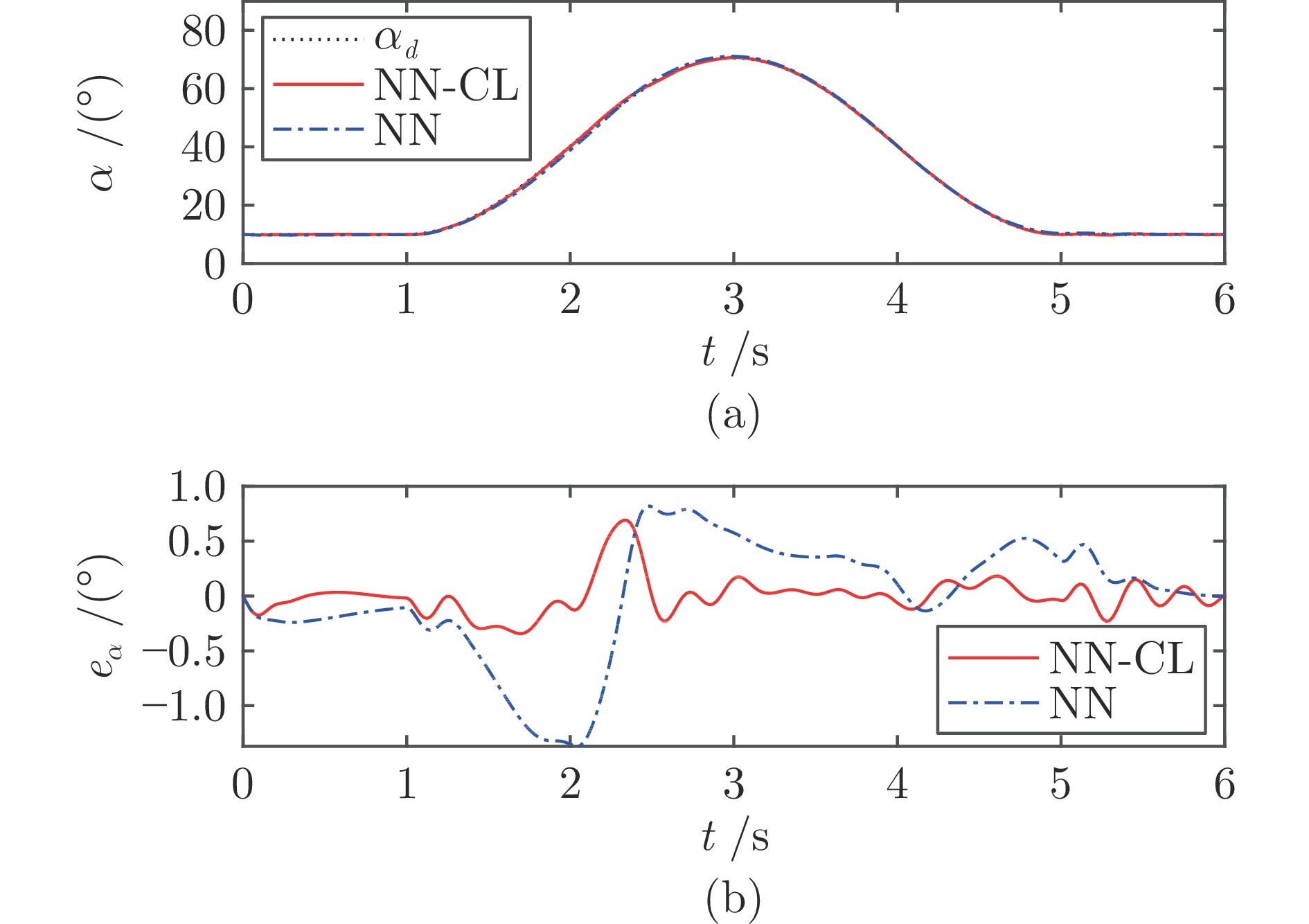
图 2 眼镜蛇机动迎角跟踪((a) 指令跟踪; (b) 跟踪误差)
Fig. 2 Angle of attack tracking under Cobra maneuver ((a) Command tracking; (b) Tracking error)
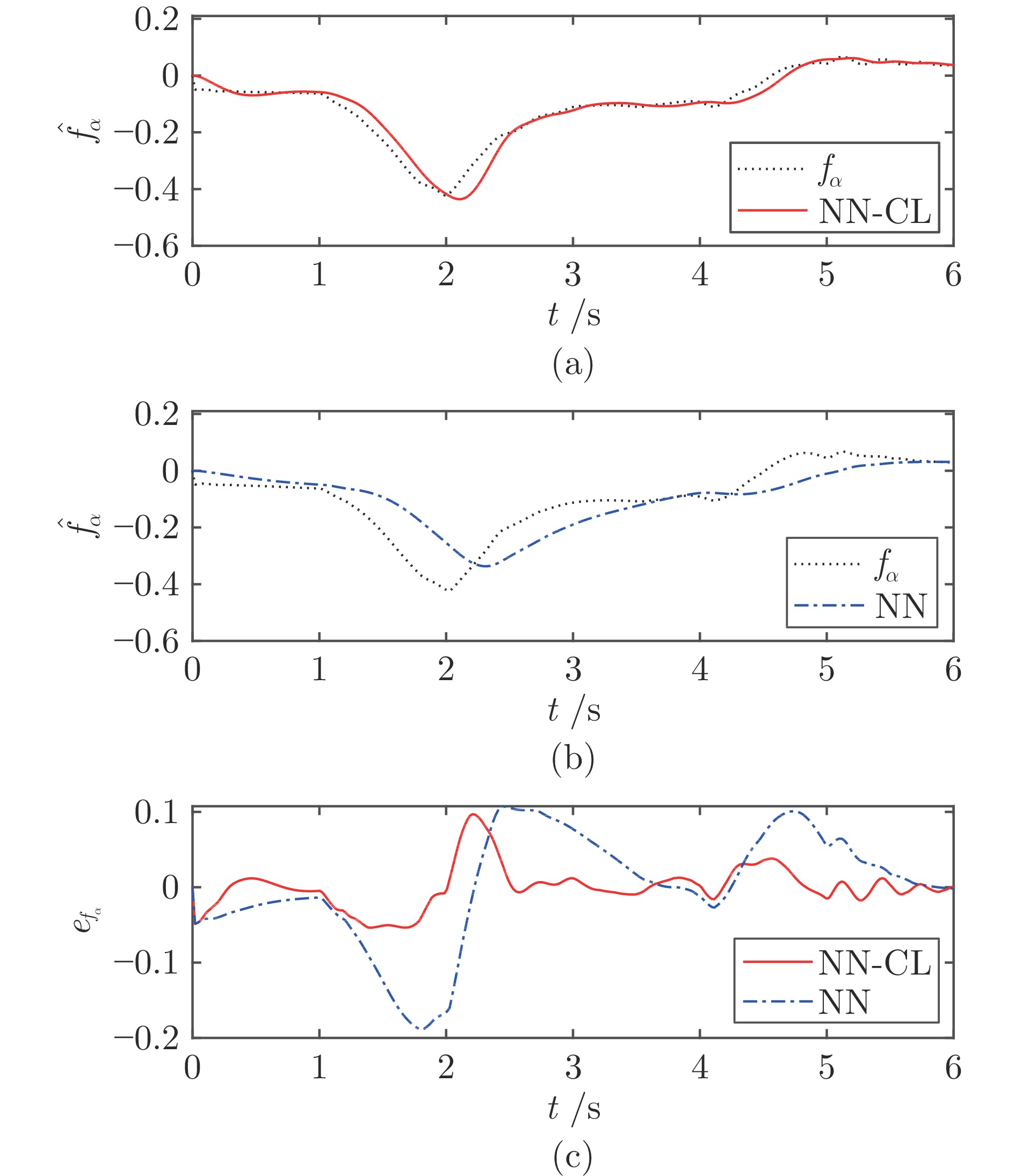
图 3 眼镜蛇机动$f_\alpha$的估计值((a) 基于NN-CL的$\hat f_\alpha$;(b) 基于NN的$\hat f_\alpha$; (c) 估计误差)
Fig. 3 Estimation of $f_\alpha$ under Cobra maneuver ((a) $\hat f_\alpha$ under NN-CL; (b) $\hat f_\alpha$ under NN; (c) Estimation error)
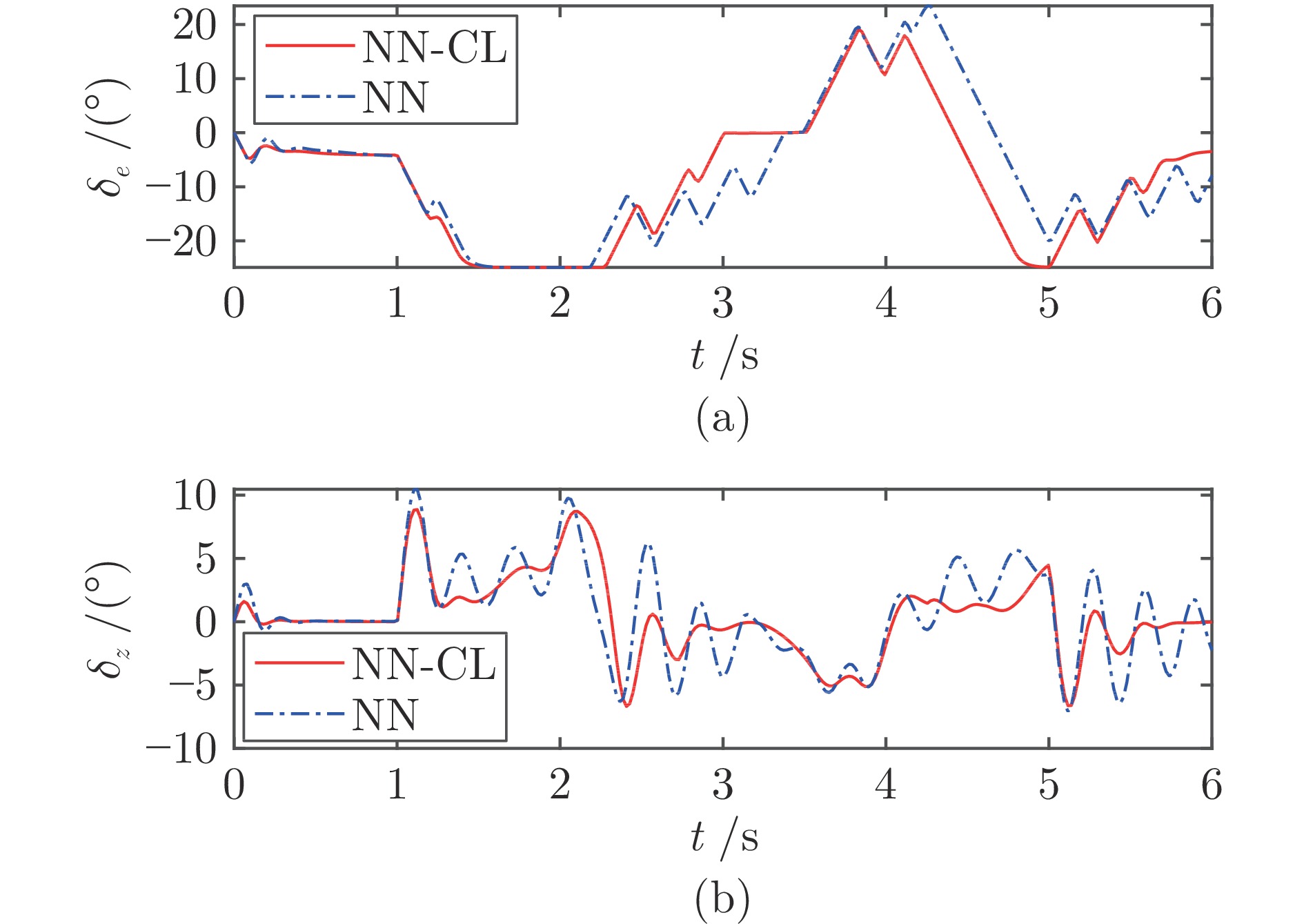
图 4 眼镜蛇机动的操纵偏转量((a) 升降舵; (b) 俯仰推矢偏角)
Fig. 4 Control surface deflection under Cobra maneuver ((a) Elevator; (b) Pitch thrust vector deflection angle)

图 5 赫伯斯特机动迎角跟踪((a) 指令跟踪; (b) 跟踪误差)
Fig. 5 Angle of attack tracking under Herbst maneuver ((a) Command tracking; (b) Tracking error)
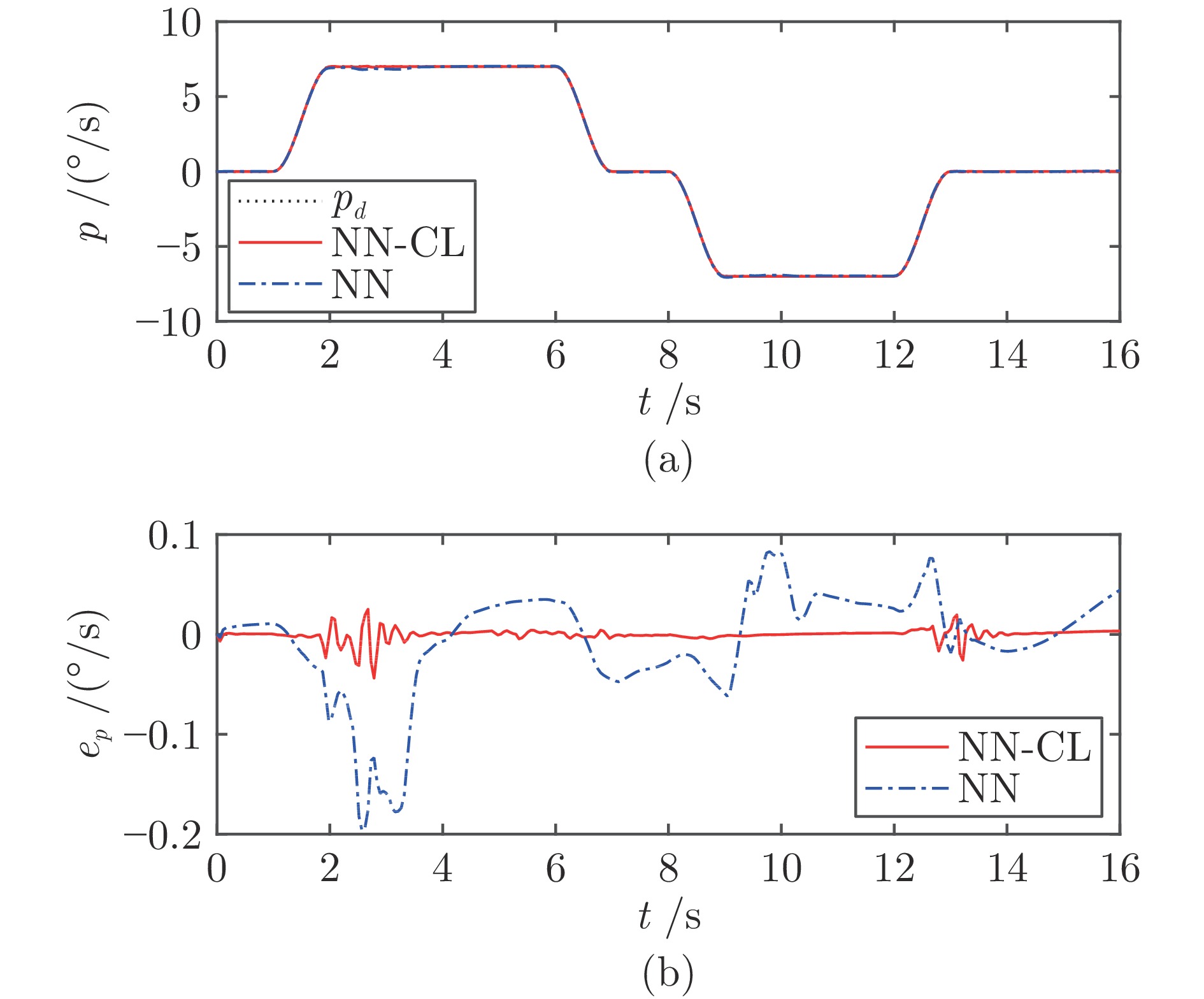
图 6 赫伯斯特机动滚转角速率跟踪((a) 指令跟踪; (b) 跟踪误差)
Fig. 6 Roll angle rate tracking under Herbst maneuver ((a) Command tracking; (b) Tracking error)
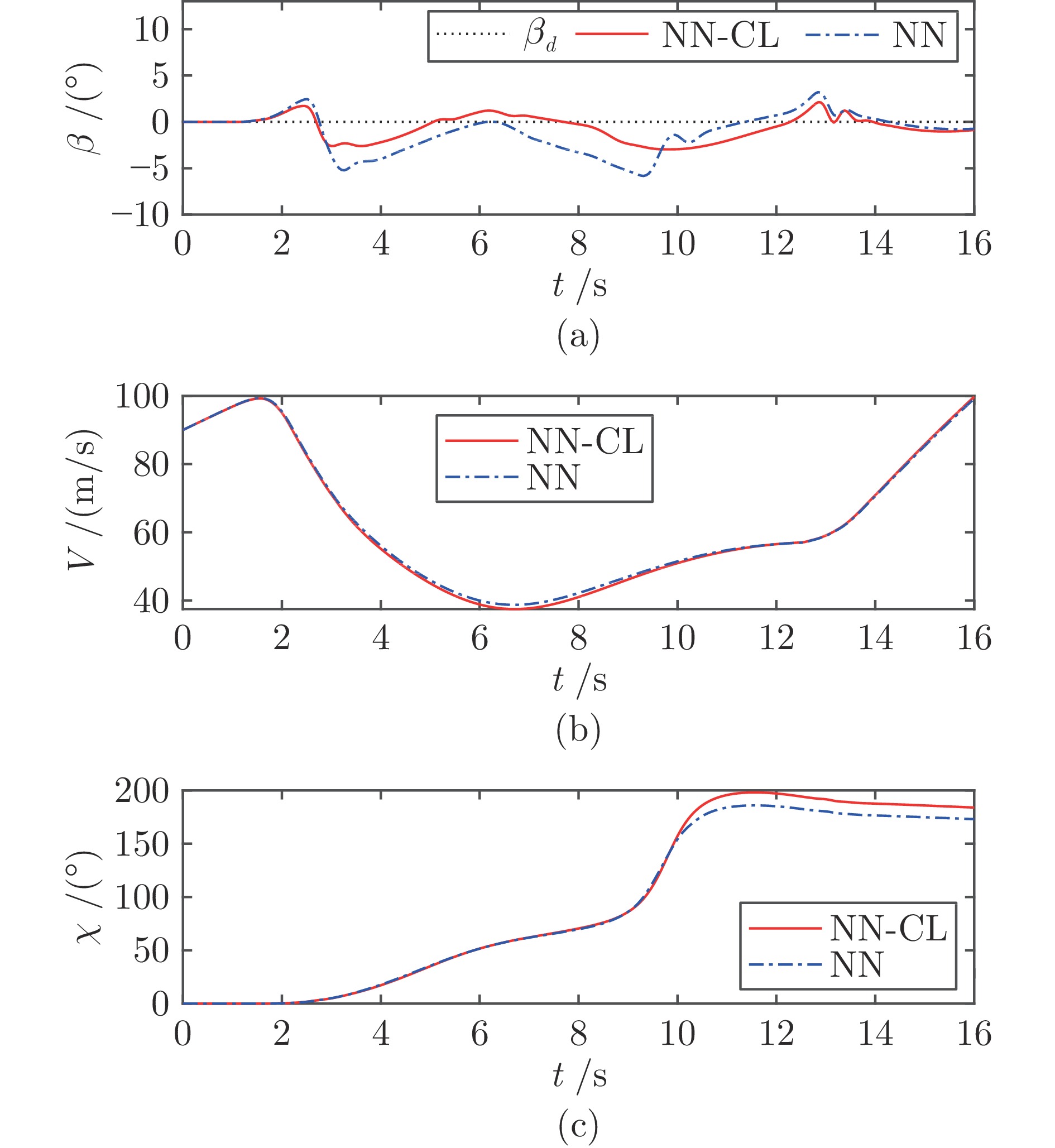
图 7 赫伯斯特机动飞行状态((a) 侧滑角;(b) 速度; (c) 航迹方位角)
Fig. 7 Flight states under Herbst maneuver ((a) Sideslip angle; (b) Speed; (c) Flight path azimuth angle)

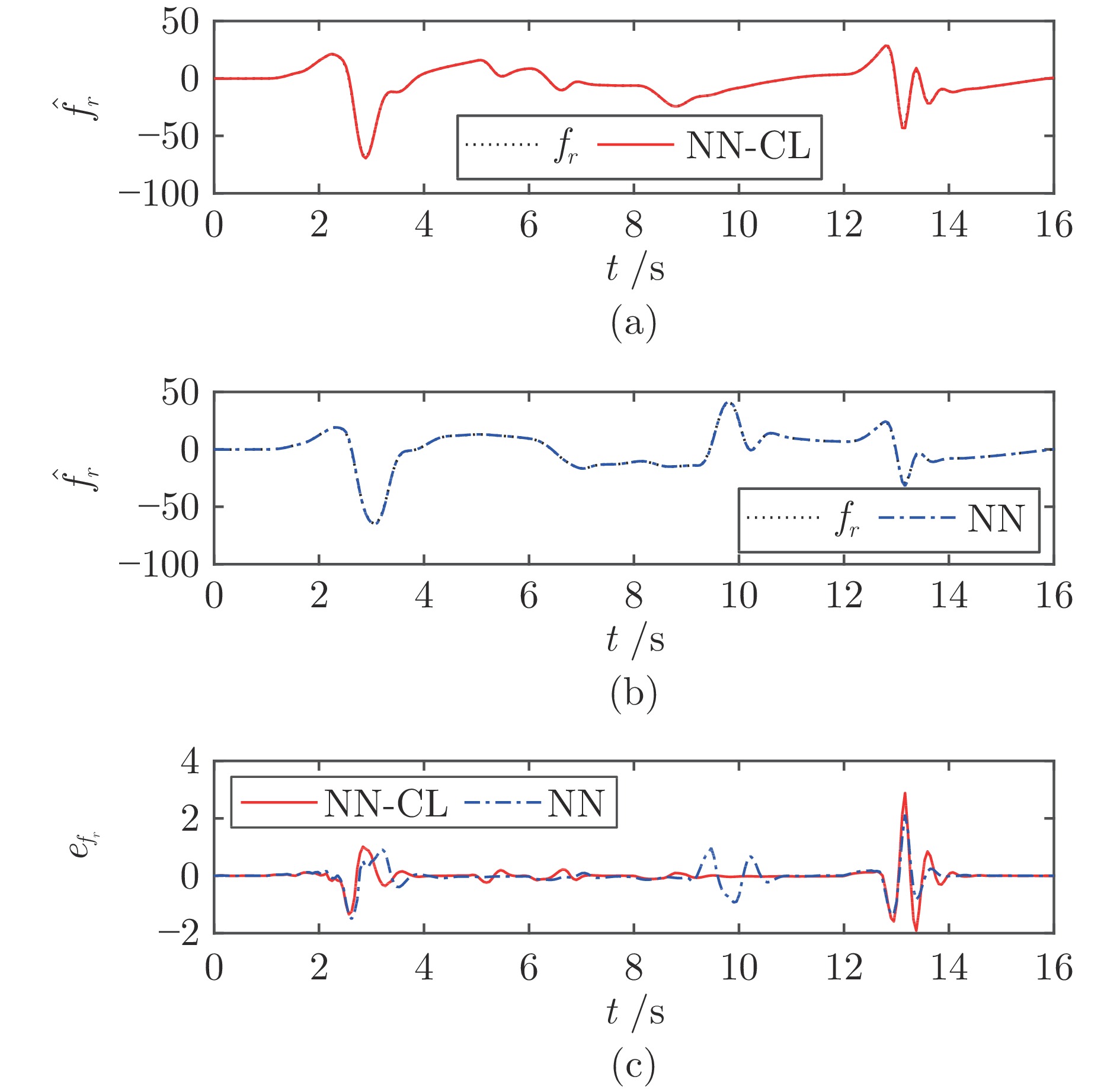
图 9 赫伯斯特机动气动操纵舵面偏转((a) 升降舵; (b) 副翼; (c) 方向舵)
Fig. 9 Aerodynamic control surfaces deflection under Herbst maneuver ((a) Elevator; (b) Aileron; (c) Rudder)
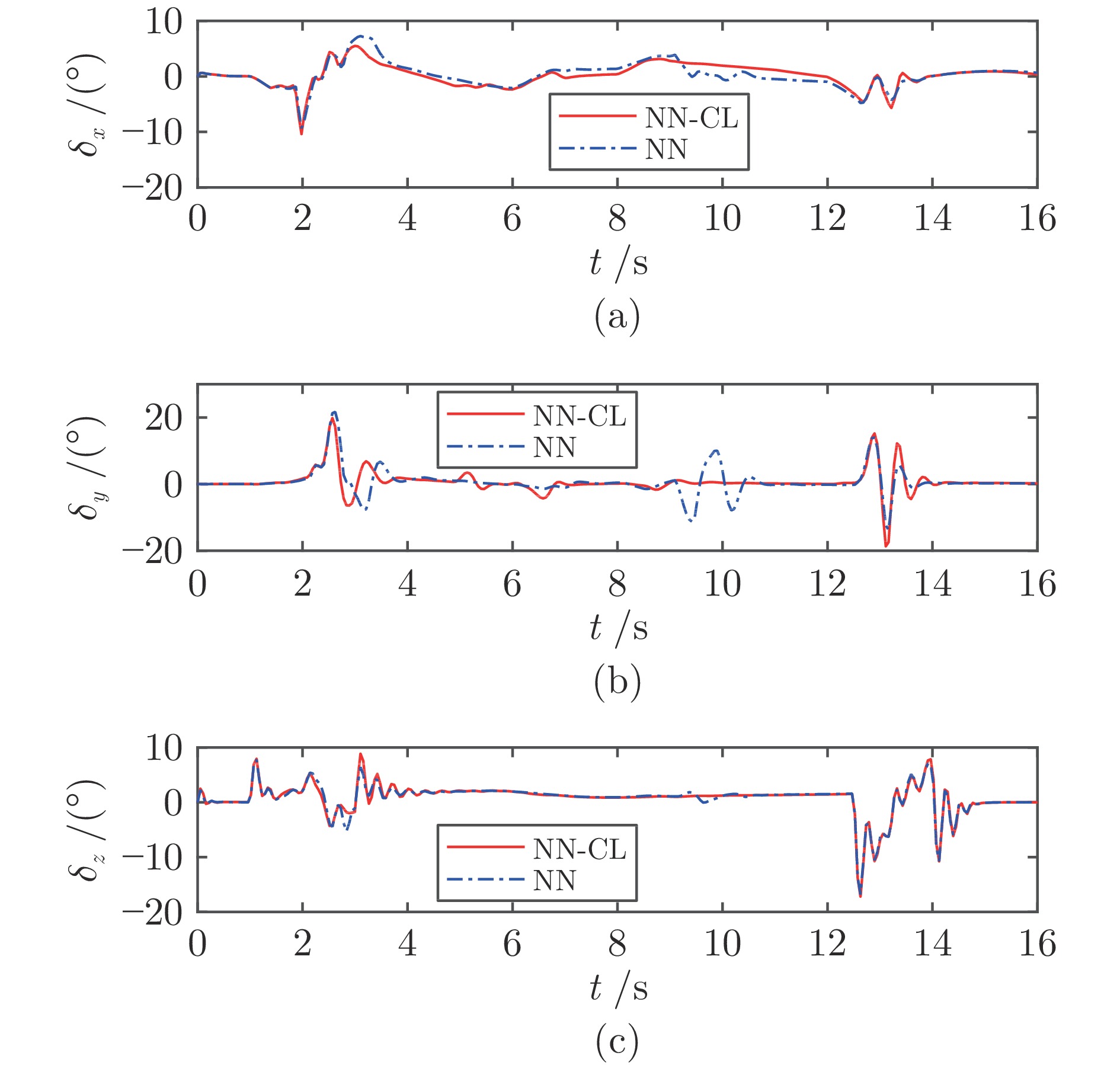
图 10 赫伯斯特机动推力矢量偏转((a)滚转推矢偏角; (b)偏航推矢偏角; (c)俯仰推矢偏角)
Fig. 10 Thrust vector nozzles deflection under Herbst maneuver ((a) Roll thrust vector deflection angle; (b) Yaw thrust vector deflection angle; (c) Pitch thrust vector deflection angle)
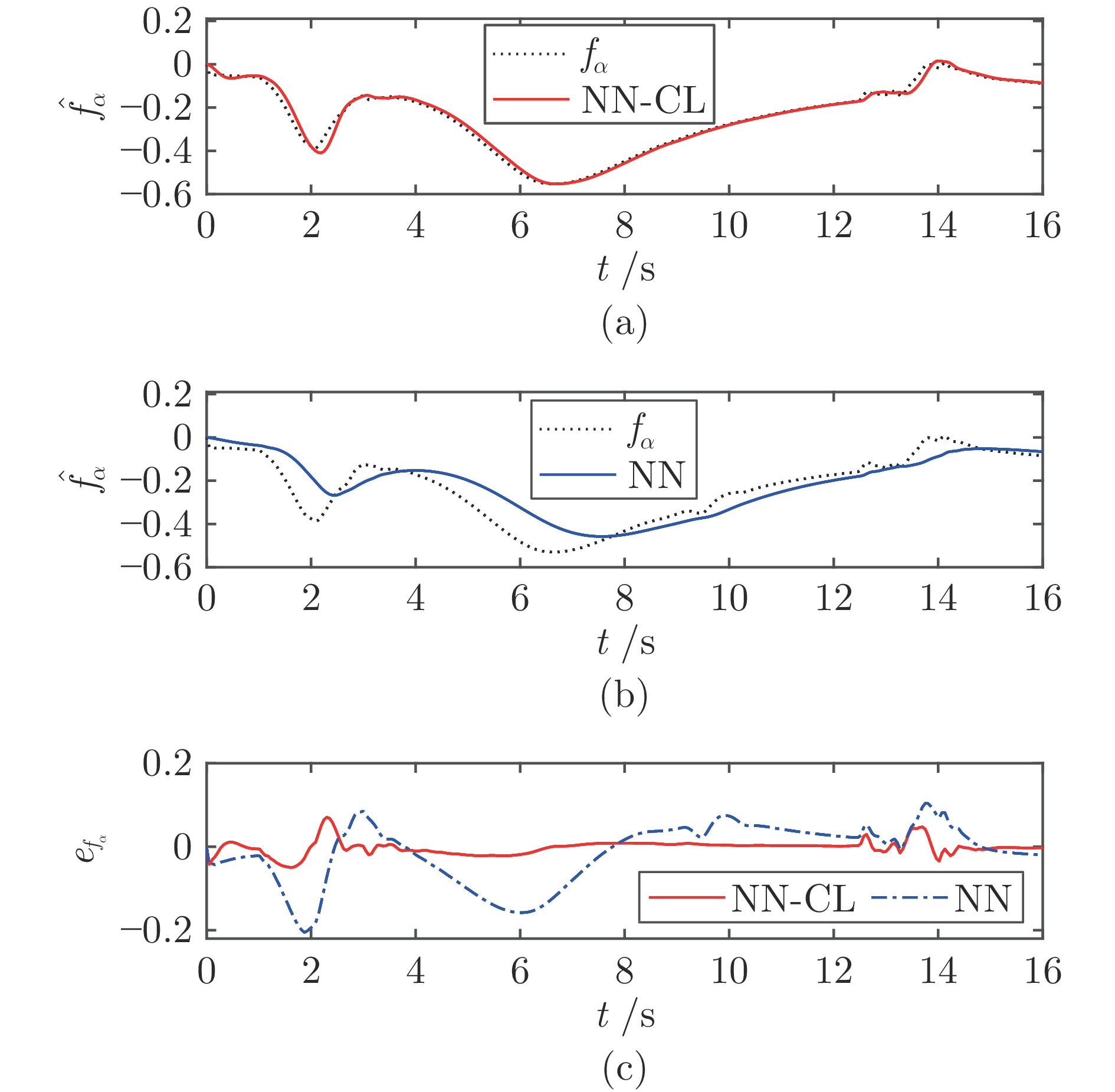
图 11 赫伯斯特机动$f_\alpha$的估计值((a) 基于NN-CL的$\hat f_\alpha$; (b) 基于NN的$\hat f_\alpha$; (c) 估计误差)
Fig. 11 Estimation of $f_\alpha$ under Herbst maneuver ((a) $\hat f_\alpha$ under NN-CL; (b) $\hat f_\alpha$ under NN; (c) Estimation error)
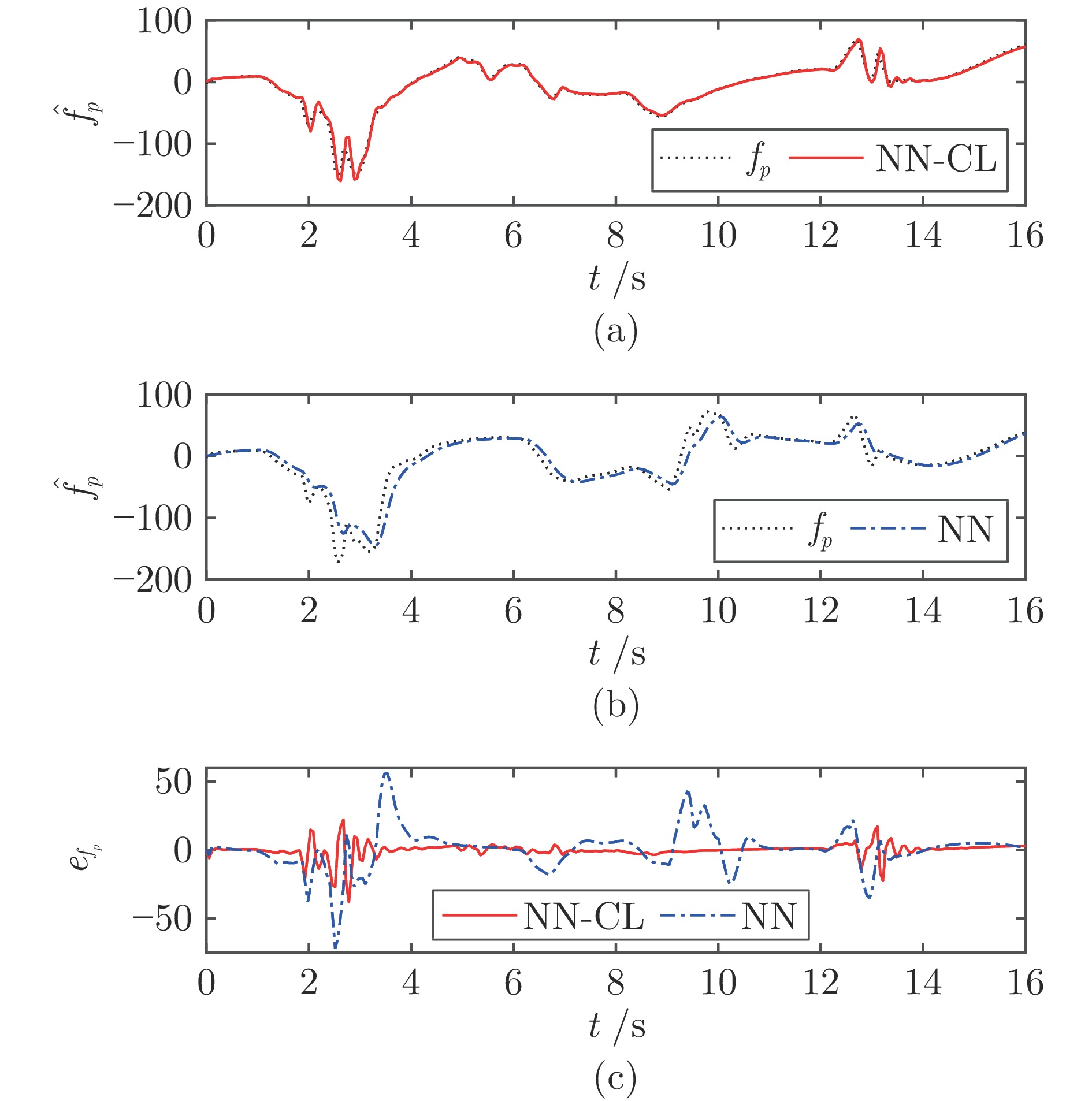
图 14 赫伯斯特机动$f_p$的估计值((a) 基于NN-CL的$\hat f_p$; (b) 基于NN的$\hat f_p$; (c) 估计误差)
Fig. 14 Estimation of $f_p$ under Herbst maneuver ((a) $\hat f_p$ under NN-CL; (b) $\hat f_p$ under NN; (c) Estimation error)
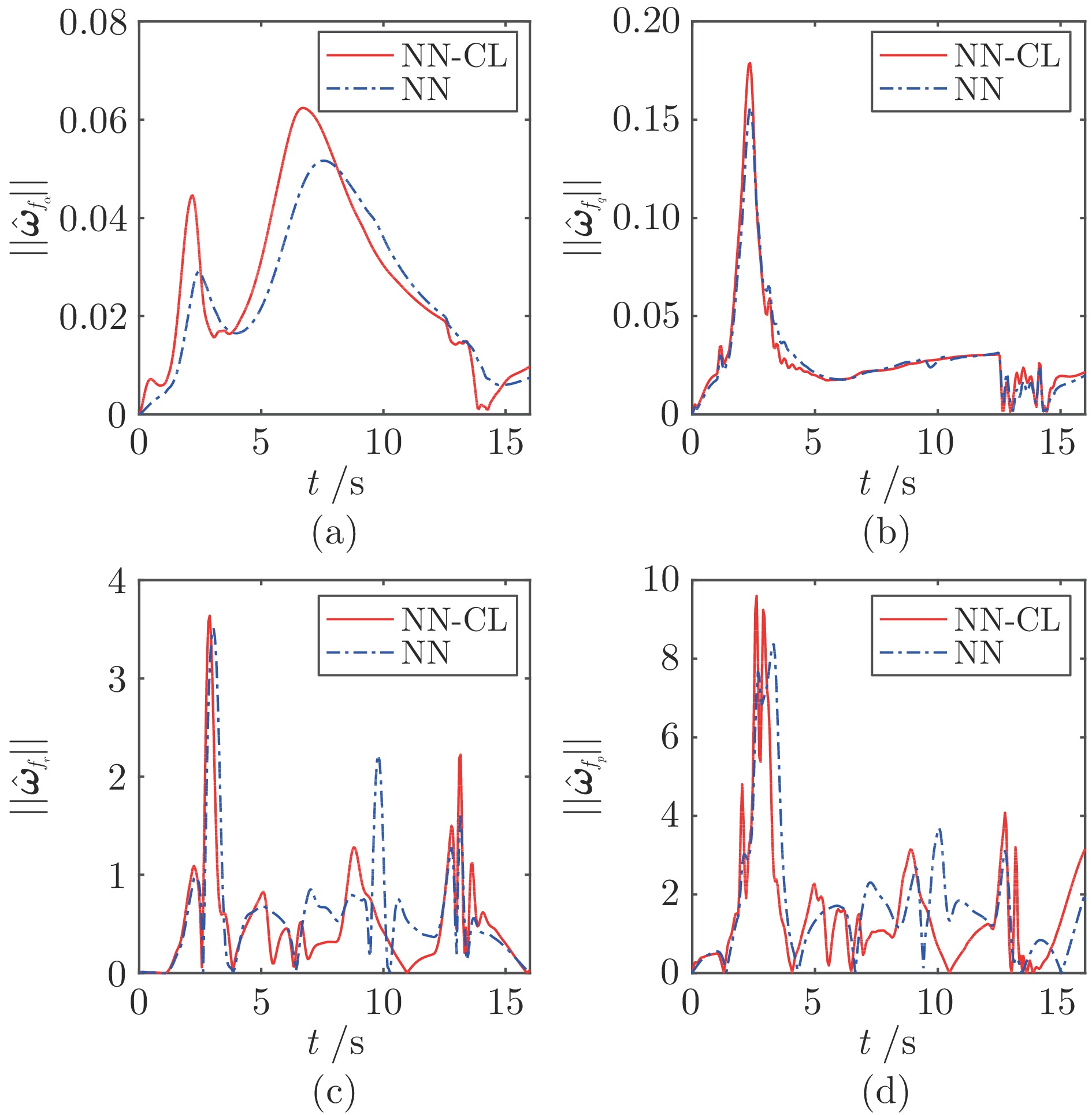
图 15 神经网络权重估计值 ((a) $\|\hat{{\boldsymbol{\omega}}}_{f_\alpha}\|$; (b) $\|\hat{{\boldsymbol{\omega}}}_{f_q}\|$; (c) $\|\hat{{\boldsymbol{\omega}}}_{f_r}\|$; (d) $\|\hat{{\boldsymbol{\omega}}}_{f_p}\|$)
Fig. 15 Estimation of NN weights ((a) $\|\hat{{\boldsymbol{\omega}}}_{f_\alpha}\|$; (b) $\|\hat{{\boldsymbol{\omega}}}_{f_q}\|$; (c) $\|\hat{{\boldsymbol{\omega}}}_{f_r}\|$; (d) $\|\hat{{\boldsymbol{\omega}}}_{f_p}\|$)
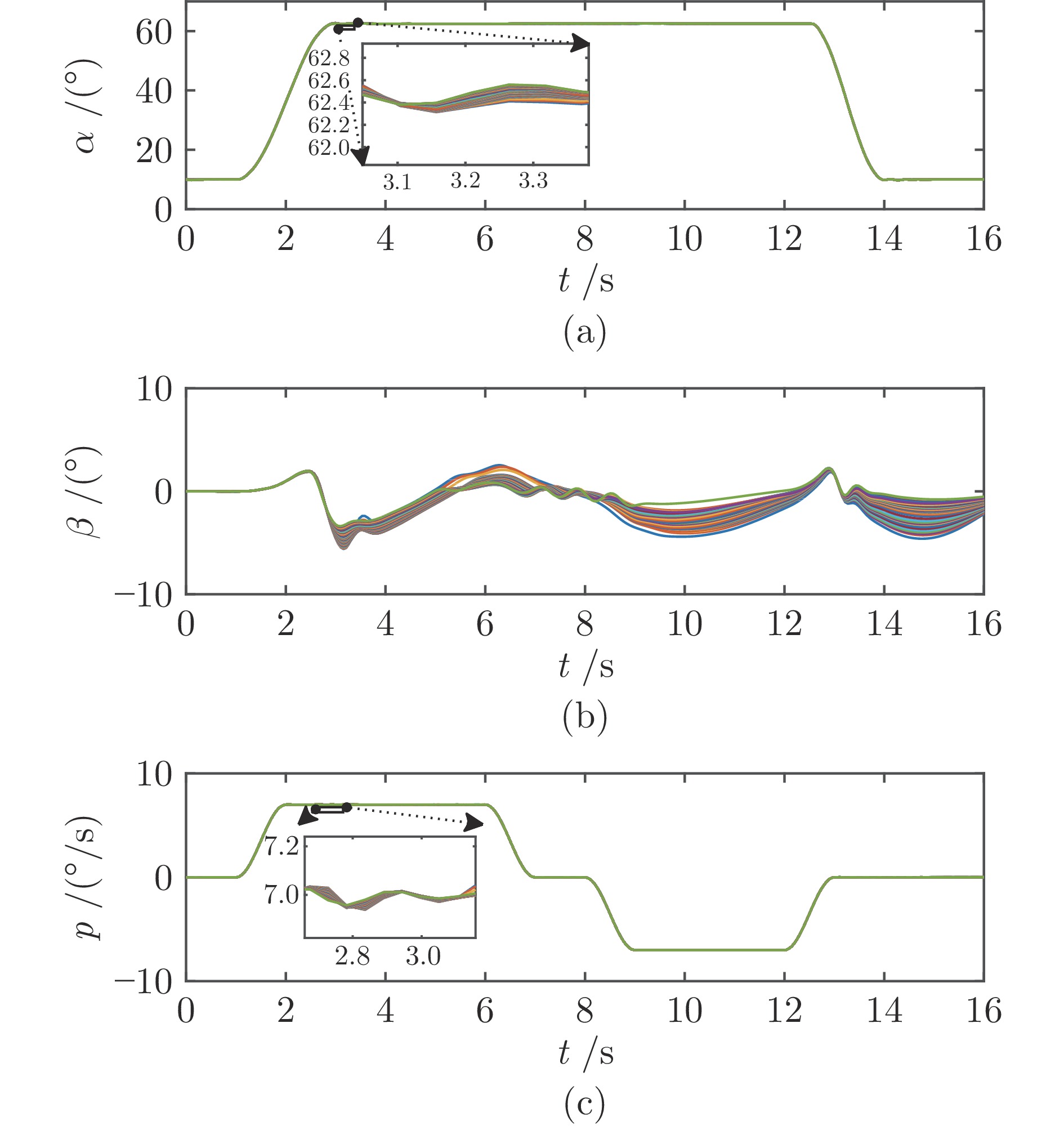
图 16 鲁棒测试((a) 迎角; (b) 侧滑角; (c) 滚转角速率)
Fig. 16 Robustness verification ((a) Angle of attack; (b) Sideslip angle; (c) Roll angle rate)
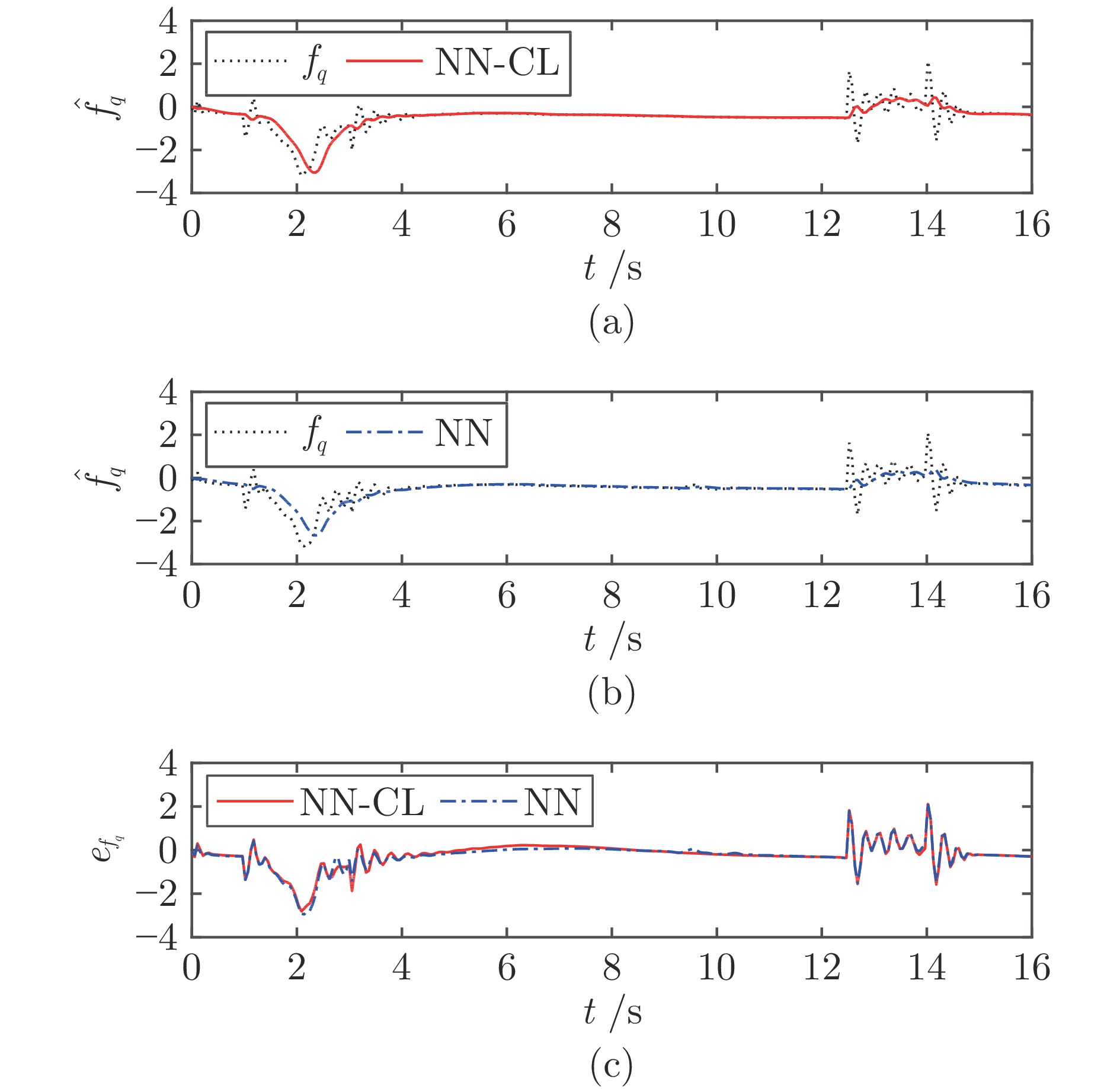
图 12 赫伯斯特机动$f_q$的估计值((a) 基于NN-CL的$\hat f_q$; (b) 基于NN的$\hat f_q$; (c) 估计误差)
Fig. 12 Estimation of $f_q$ under Herbst maneuver ((a) $\hat f_q$ under NN-CL; (b) $\hat f_q$ under NN; (c) Estimation error)
-
[1] 张子军, 赵彤, 孙烨, 李宏信. 飞机大迎角飞行问题研究综述. 航空工程进展, 2022, 13(3): 74−85Zhang Zi-Jun, Zhao Tong, Sun Ye, Li Hong-Xin. Review of the study on high-angle-of-attack flight problems of aircraft. Advances in Aeronautial Science and Engineering, 2022, 13(3): 74−85 [2] 王海峰, 展京霞, 陈科, 陈翔, 陈梓钧. 战斗机大迎角气动特性研究技术的发展与应用. 空气动力学学报, 2022, 40(1): 1−25Wang Hai-Feng, Zhan Jing-Xia, Chen Ke, Chen Xiang, Chen Zi-Jun. Development and application of aerodynamic research technologies for fighters at high angle of attack. Acta Aerodynamic Sinica, 2022, 40(1): 1−25 [3] Richardson T, Lowenberg M, DiBernardo M, Charles G. Design of a gain-scheduled flight control system using bifurcation analysis. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 444−453 doi: 10.2514/1.13902 [4] 毛艳岭, 富月. 非线性系统自适应最优切换控制方法. 自动化学报, 2023, 49(10): 2122−2135Mao Yan-Ling, Fu Yue. Adaptive optimal switching control of nonlinear systems. Acta Automatica Sinica, 2023, 49(10): 2122−2135 [5] Wang Q, Stengel R F. Robust nonlinear flight control of a high-performance aircraft. IEEE Transactions on Control Systems Technology, 2005, 13(1): 15−26 doi: 10.1109/TCST.2004.833651 [6] Wang D, Chen X. H∞-Based selective inversion of nonminimum-phase systems for feedback controls. IEEE/CAA Journal of Automatica Sinica, 2020, 7(3): 702−710 doi: 10.1109/JAS.2020.1003138 [7] 蔡云鹏, 张鹏, 韩英华. 基于跟踪微分器的增量动态逆容错控制方法及应用. 飞行力学, 2023, 41(5): 44−51 doi: 10.13645/j.cnki.f.d.20230810.008Cai Yun-Peng, Zhang Peng, Han Ying-Hua. Incremental dynamic inversion fault-tolerant control method based on tracking differentiator and application. Flight Dynamics, 2023, 41(5): 44−51 doi: 10.13645/j.cnki.f.d.20230810.008 [8] Yang Z B, Cheng B, Lv C X, Wang Y Q, Lu P. Fuzzy neural network dynamic inverse control strategy for quadrotor UAV based on atmospheric turbulence. Applied Sciences, 2022, 12(23): Article No. 12232 doi: 10.3390/app122312232 [9] Zhao B, Shi G, Liu D R. Event-triggered local control for nonlinear interconnected systems through particle swarm optimization-based adaptive dynamic programming. IEEE Transactions on Systems, Man, and Cybernetics-Systems, 2023, 53(12): 7342−7353 doi: 10.1109/TSMC.2023.3298065 [10] Seyedtabaii S, Delavari M. The choice of sliding surface for robust roll control: Better suppression of high angle of attack/sideslip perturbations. International Journal of Micro Air Vehicles, 2018, 10(4): 330−339 doi: 10.1177/1756829318771059 [11] Shou Y X, Xu B, Liang X H, Yang D P. Aerodynamic/reaction-jet compound control of hypersonic reentry vehicle using sliding mode control and neural learning. Aerospace Science and Technology, 2021, 111: Article No. 106564 [12] Liu J, Sun M, Chen Z, Sun Q. Super-twisting sliding mode control for aircraft at high angle of attack based on finite-time extended state observer. Nonlinear Dynamics, 2020, 99: 2785−2799 doi: 10.1007/s11071-020-05481-1 [13] Wu D, Chen M, Gong H. Robust control of post-stall pitching maneuver based on finite-time observer. ISA Transactions, 2017, 70: 53−63 doi: 10.1016/j.isatra.2017.06.015 [14] Xu B, Wang D, Zhang Y, Shi Z K. DOB-based neural control of flexible hypersonic flight vehicle considering wind effects. IEEE Transactions Industrial Electronics, 2017, 64(11): 8676−8685 doi: 10.1109/TIE.2017.2703678 [15] Yu J P, Shi P, Zhao L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica, 2018, 92: 173−180 doi: 10.1016/j.automatica.2018.03.033 [16] Xu B, Shou Y X, Shi Z K, Yan T. Predefined-time hierarchical coordinated neural control for hypersonic reentry vehicle. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(11): 8456−8466 [17] Zhang J X, Li K W, Li Y M. Output-feedback based simplified optimized backstepping control for strict-feedback systems with input and state constraints. IEEE/CAA Journal of Automatica Sinica, 2021, 8(6): 1119−1132 doi: 10.1109/JAS.2021.1004018 [18] 王霞, 许斌, 洪锐. 非最小相位高超声速飞行器自适应参数估计控制. 中国科学: 技术科学, 2021, 51(9): 1066−1074 doi: 10.1360/SST-2020-0211Wang Xia, Xu Bin, Hong Rui. Adaptive parameter estimation control of nonminimum phase hypersonic flight vehicle. Scientia Sinica Technologica, 2021, 51(9): 1066−1074 doi: 10.1360/SST-2020-0211 [19] Sonneveldt L, Chu Q P, Mulder J A. Nonlinear flight control design using constrained adaptive backstepping. Journal of Guidance, Control, and Dynamics, 2007, 30(2): 322−336 doi: 10.2514/1.25834 [20] 朱铁夫, 李明, 邓建华. 基于Backstepping控制理论的非线性飞控系统和超机动研究. 航空学报, 2005, 26(4): 430−433 doi: 10.3321/j.issn:1000-6893.2005.04.010Zhu Tie-Fu, Li Ming, Deng Jian-Hua. Nonlinear flight control system based on Backstepping theory and supermaneuver. Acta Aeronautica et Astronautica Sinica, 2005, 26(4): 430−433 doi: 10.3321/j.issn:1000-6893.2005.04.010 [21] Xu B, Shou Y X, Wang X, Shi P. Finite-time composite learning control of strict-feedback nonlinear system using historical stack. IEEE Transactions on Cybernetics, 2023, 53(9): 5777−5787 doi: 10.1109/TCYB.2022.3182981 [22] Zhao B, Zhang Y W, Liu D R. Adaptive dynamic programming-based cooperative motion/force control for modular reconfigurable manipulators: A joint task assignment approach. IEEE Transactions on Neural Networks and Learning Systems, 2023, 34(12): 10944−10954 doi: 10.1109/TNNLS.2022.3171828 [23] Guo Y Y, Xu B. Finite-time deterministic learning command filtered control for hypersonic flight vehicle. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(5): 4214−4225 doi: 10.1109/TAES.2022.3160687 -

 下载:
下载:


计量
- 文章访问数: 957
- HTML全文浏览量: 302
- PDF下载量: 278
- 被引次数: 0
