

Finite Time Synchronized Formation Control of Unmanned Surface Vehicles With External Disturbances
-
摘要: 针对有限时间控制中各状态分量收敛时间不同问题, 提出一种无人艇编队有限时间同步控制框架, 在此框架下设计的有限时间同步编队控制方法可巧妙地达到无人艇所有自由度误差在同一时刻收敛到平衡点. 首先, 针对现有干扰观测器与时间同步稳定框架不兼容问题, 设计有限时间同步干扰观测器; 然后, 利用比例保持特性设计有限时间同步稳定编队控制器, 并验证了所提控制算法的稳定性; 最后, 通过3艘无人艇编队进行仿真实验, 实验结果验证了所提控制算法的有效性和优越性. 所提控制方法对有时间同步控制需求的航海、航空航天和工业领域具有现实意义.Abstract: A finite time synchronization control framework for unmanned surface vehicles (USVs) is proposed to address the issue of different convergence times of various states in finite time control. The finite time synchronization formation control method designed under this framework can cleverly achieve that all degrees of freedom errors of USVs converge to an equilibrium point at the same time. Firstly, to address the issue of incompatibility between existing disturbance observers and time synchronization stabilization frameworks, a finite time synchronization disturbance observer is designed. Furthermore, utilizing the ratio persistence property, a finite time synchronous stable formation controller is designed, and the stability of the proposed control algorithm is demonstrated. Finally, simulation research was conducted on three USVs, and the results verified the effectiveness and superiority of the proposed control algorithm. The control method proposed in this article has practical significance for the fields of navigation, aerospace, and industry that require time synchronization control.
-
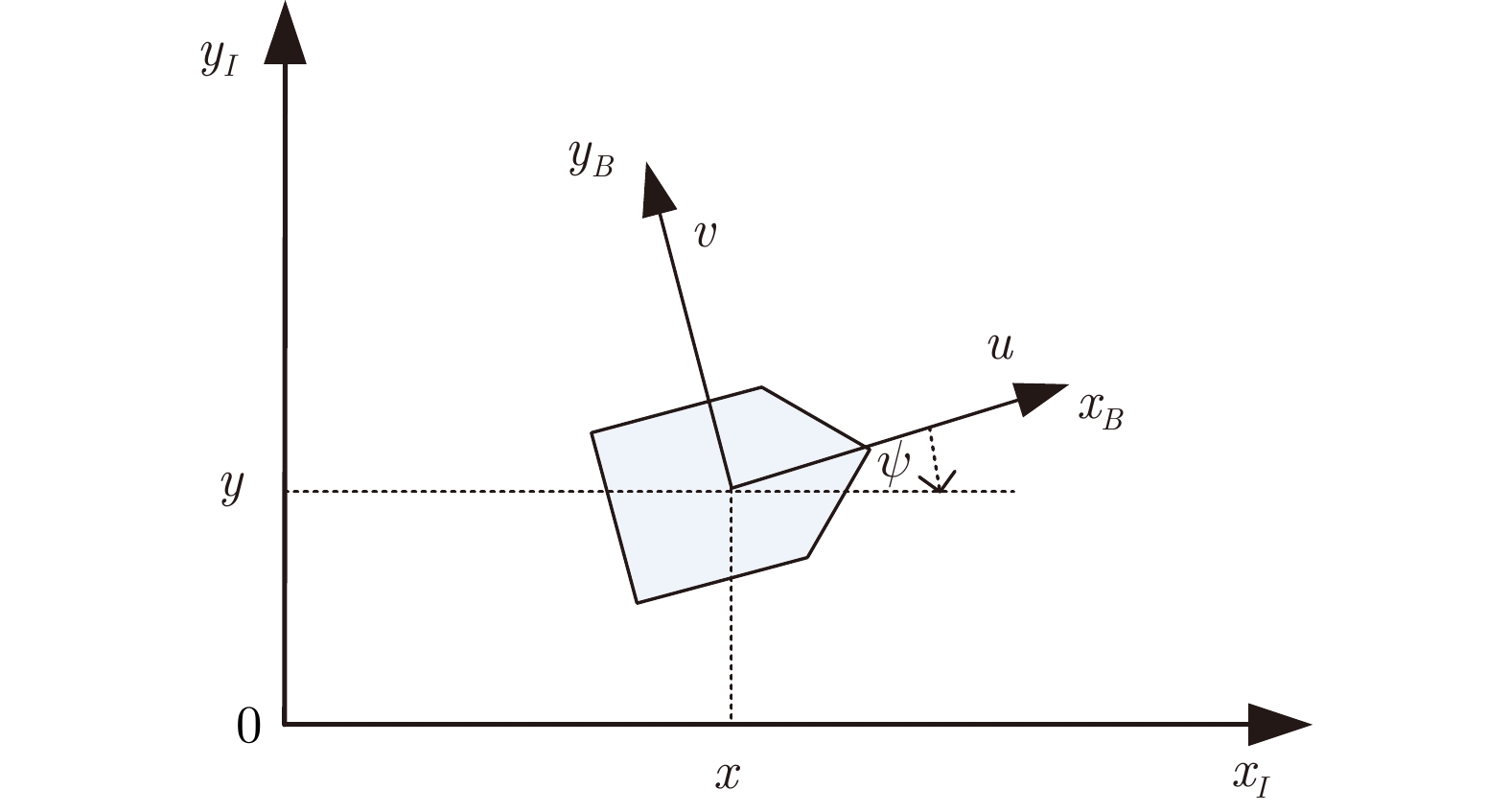
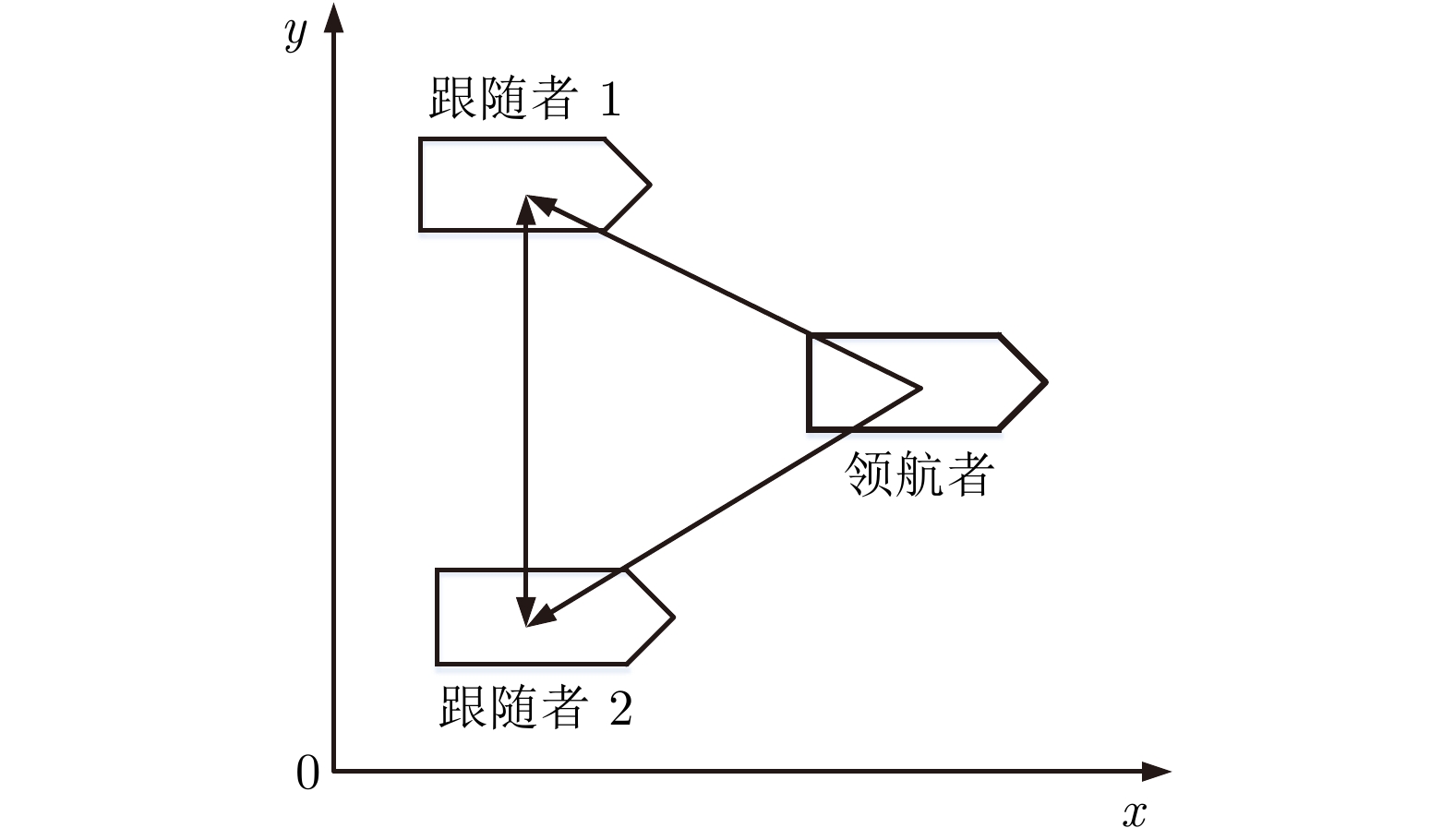
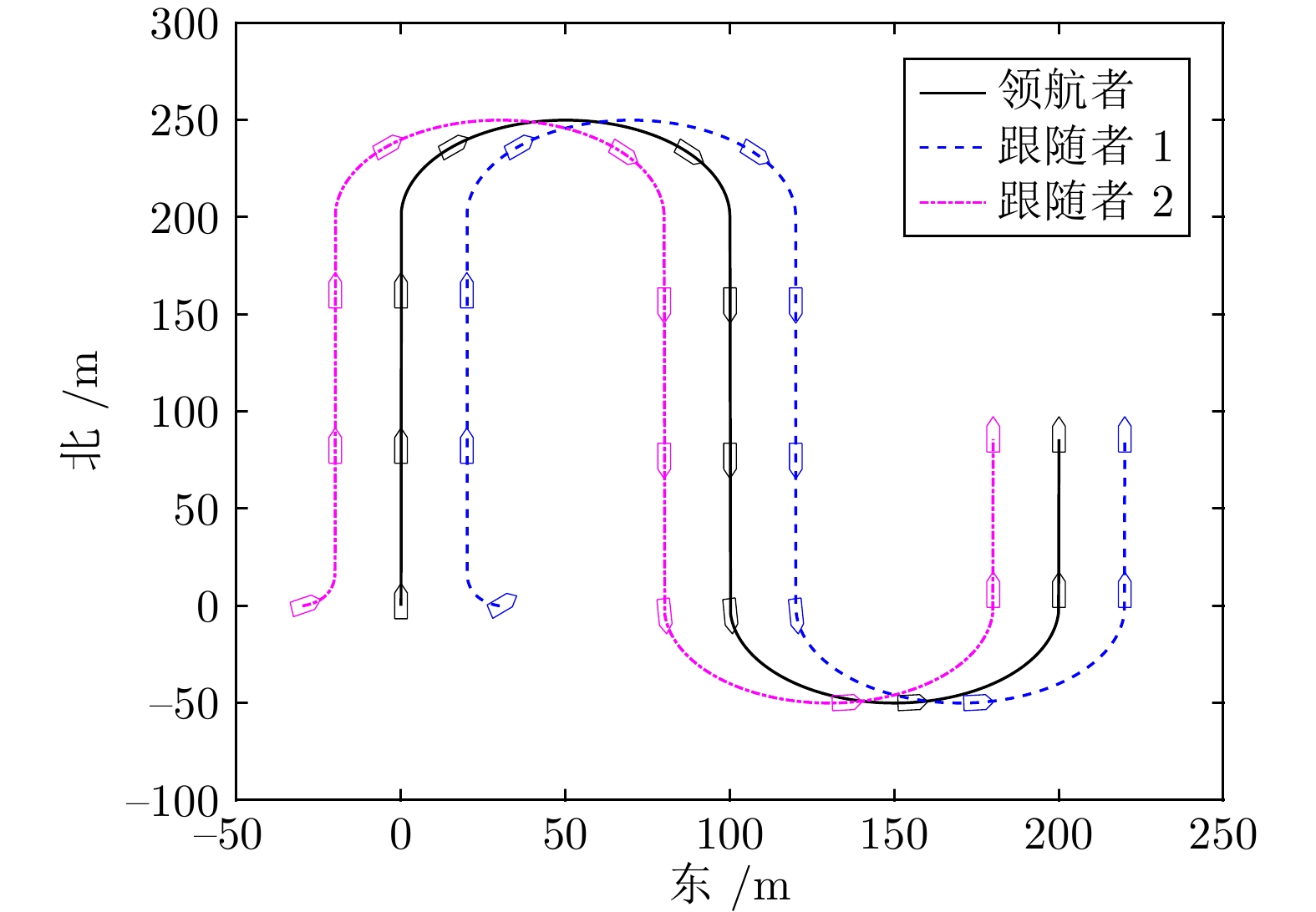
图 1 北-东坐标系的无人艇编队运动曲线
Fig. 1 Unmanned surface vehicles' moving curve in the north-east frame
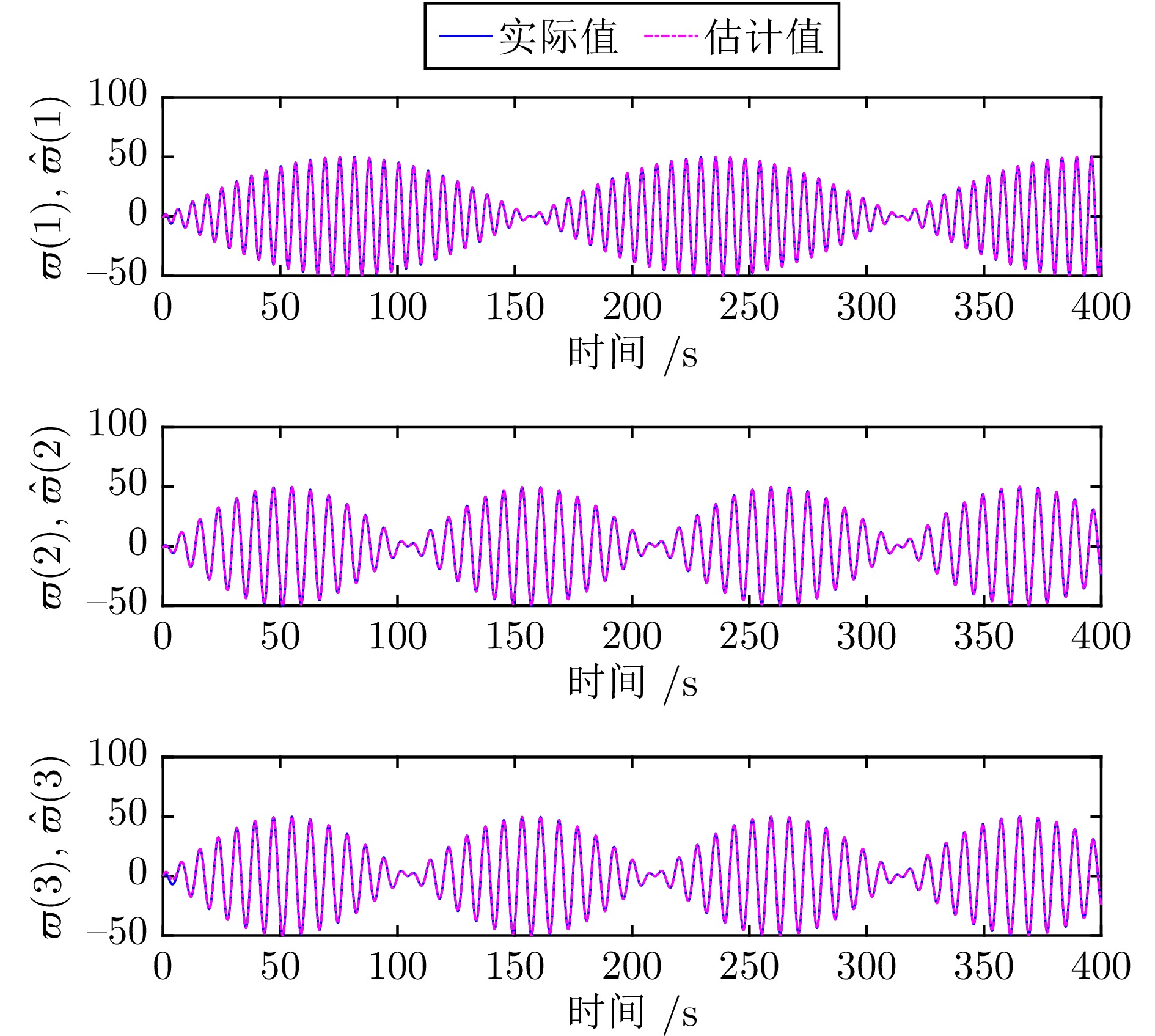
图 8 跟随者 1 在 3 个自由度方向的外界环境干扰和模型不确定性实际值与估计值
Fig. 8 Actual and estimatedvalues of external disturbances and model uncertainties for follower 1 in three degrees of freedom
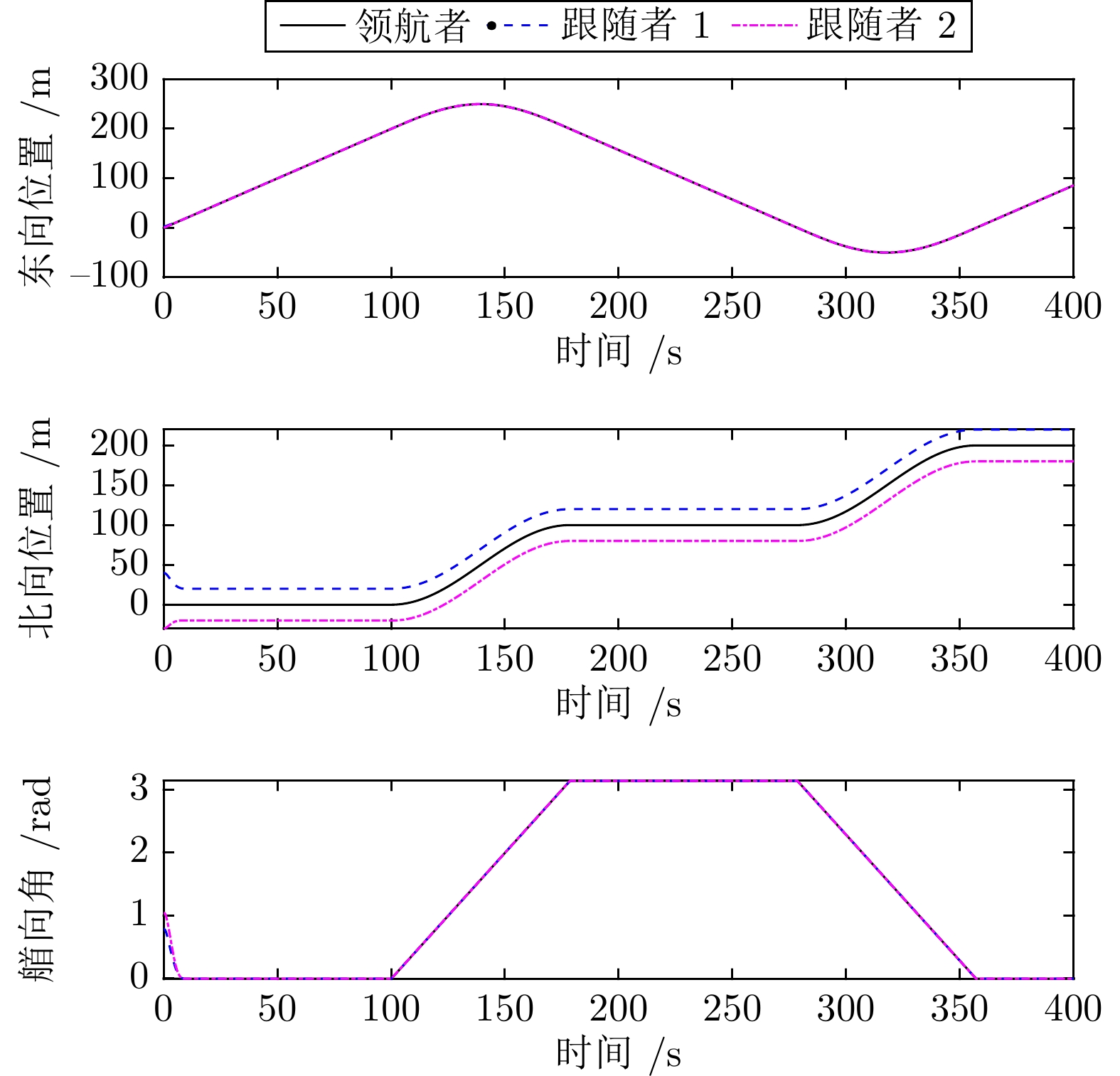
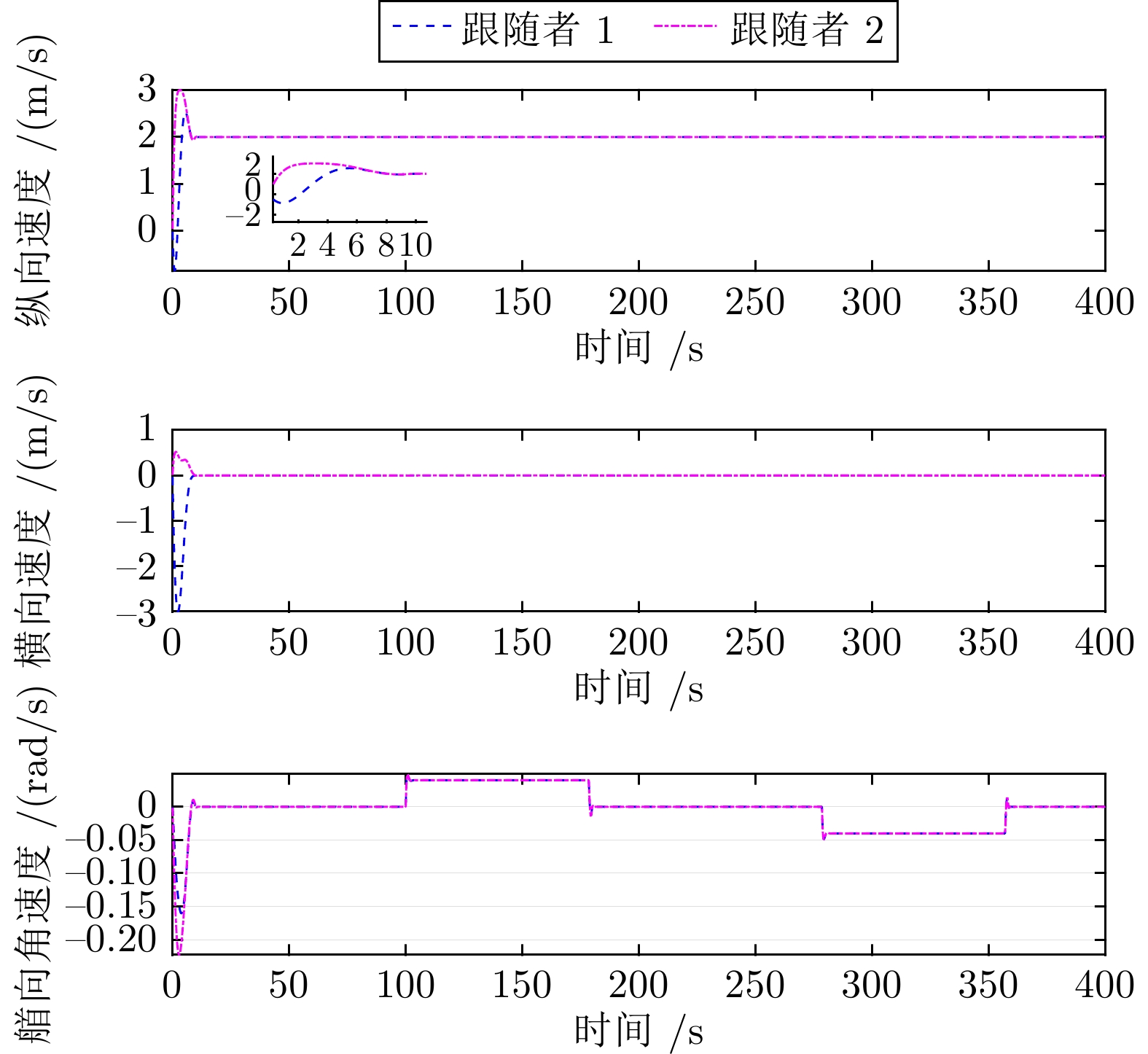
图 5 各无人艇位置和艏向角变化曲线
Fig. 5 Position and heading variation curve of unmanned surface vehicles
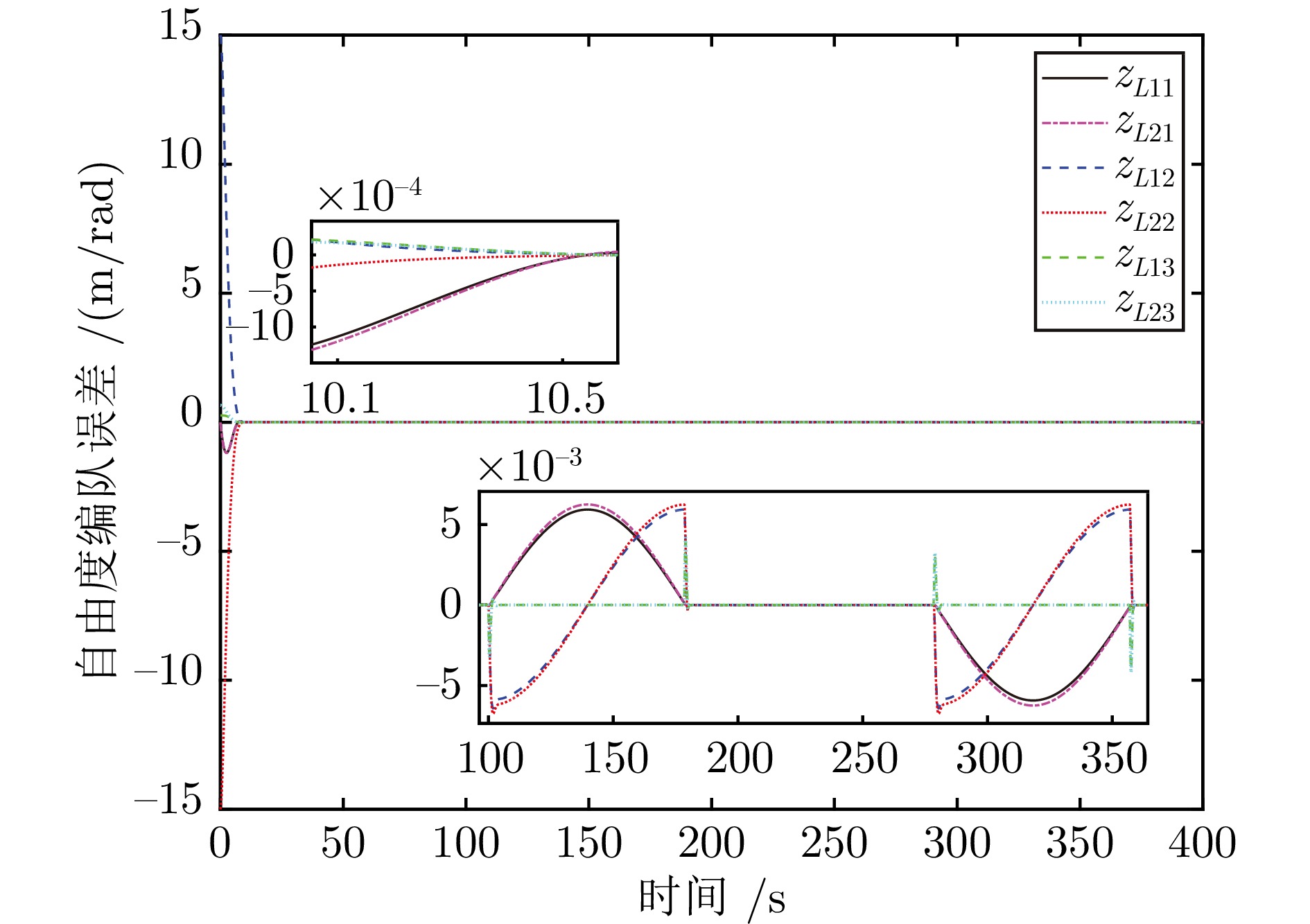
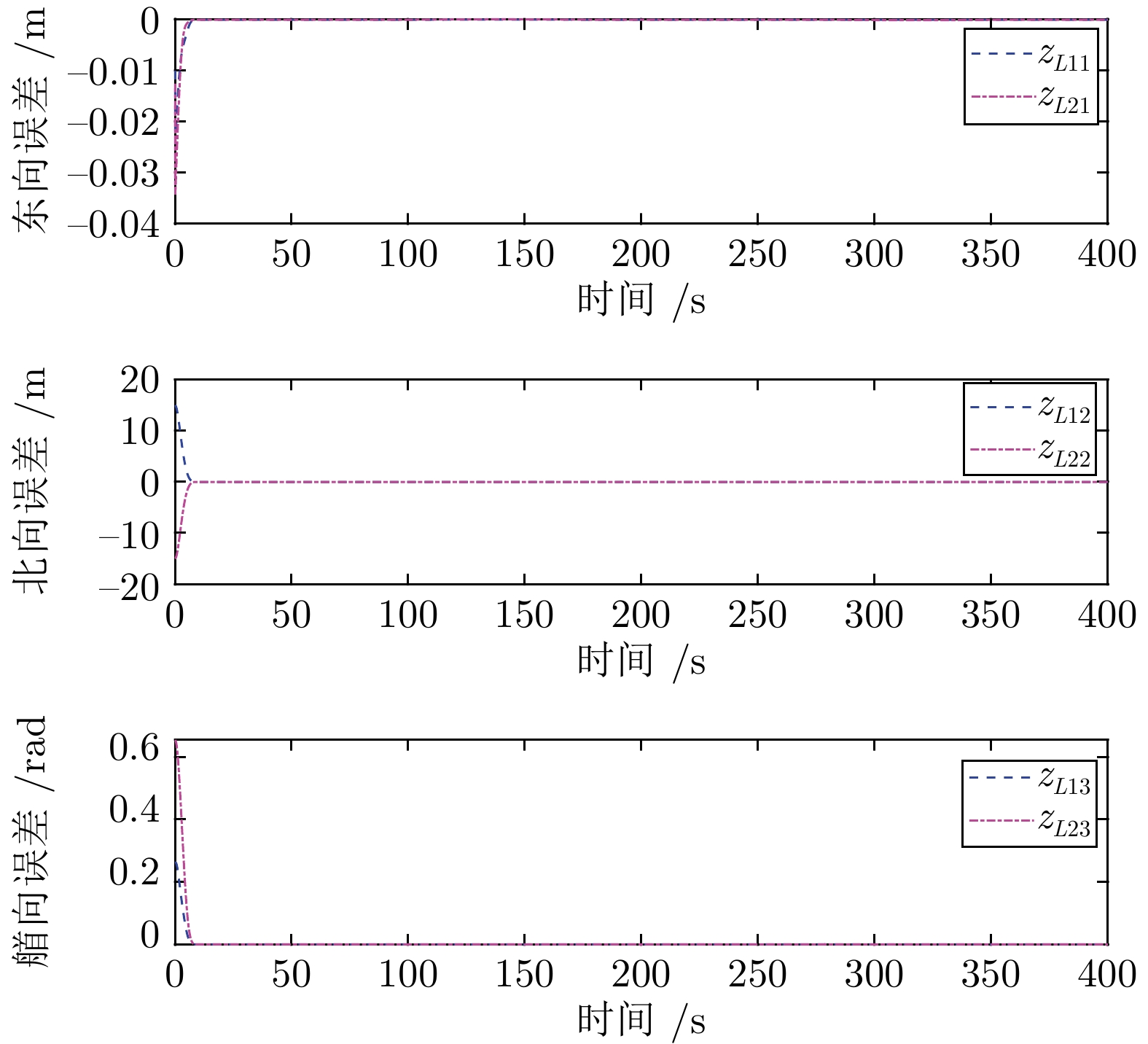
图 7 无人艇各自由度编队误差在同一时刻收敛曲线
Fig. 7 Convergence curve of all degrees of freedom formation errors at the same time
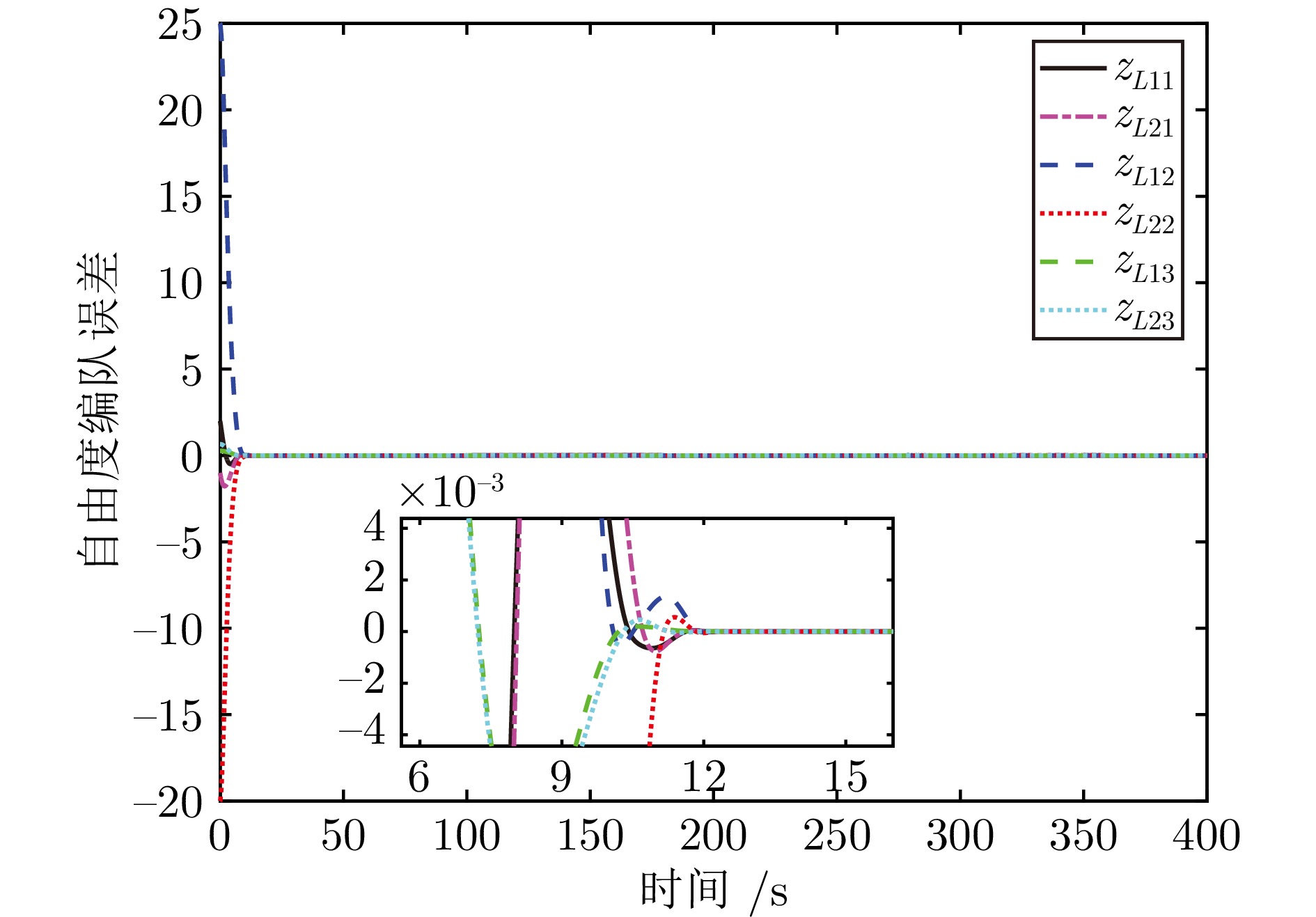
图 9 改变初始值编队控制误差收敛曲线
Fig. 9 Formation error curve in the situation of the initial values changed
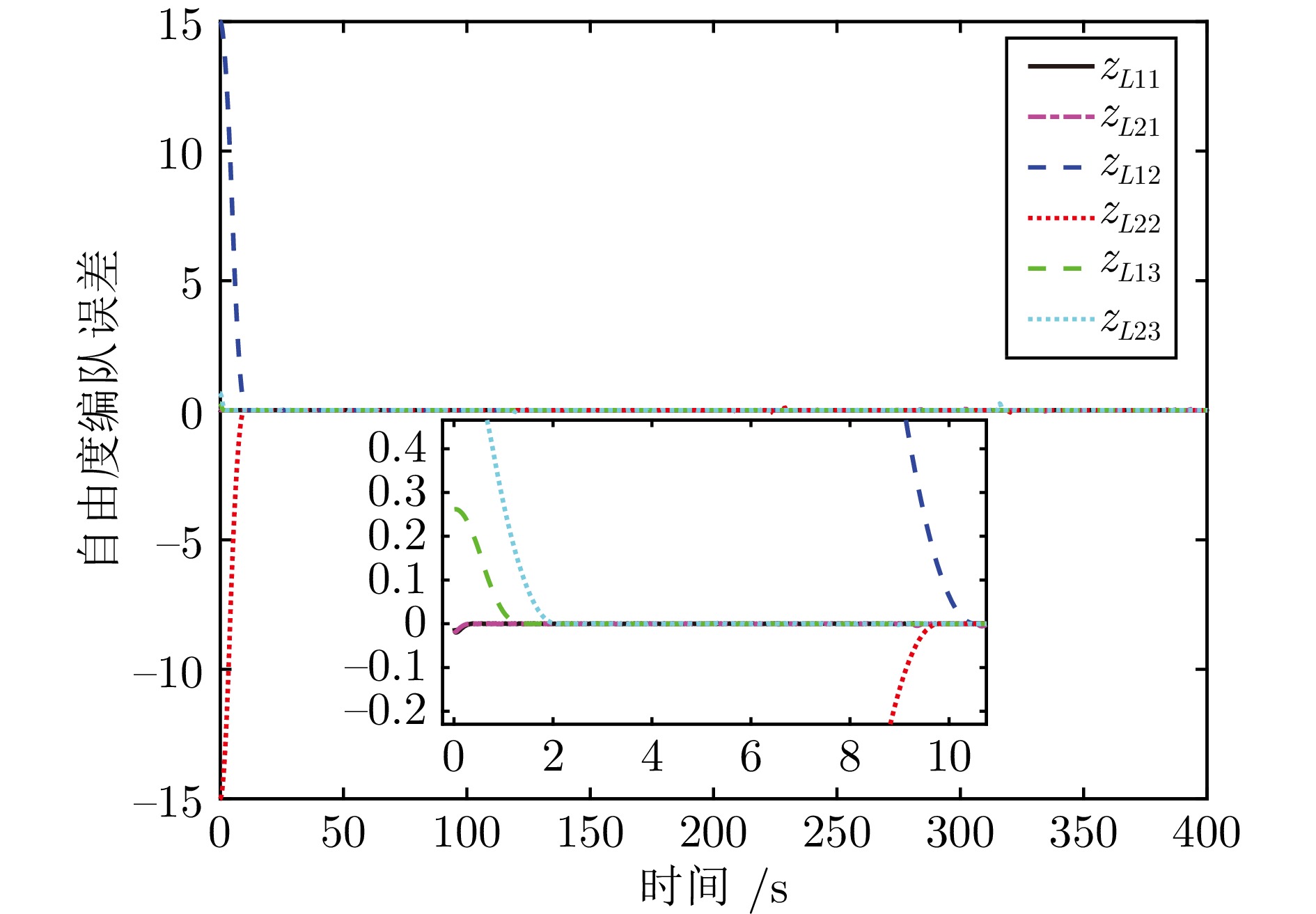
图 10 文献[25]基于符号函数的有限时间非线性滑模控制误差收敛曲线
Fig. 10 Convergence curve of finite time nonlinear sliding mode control error based on sign function in [25]
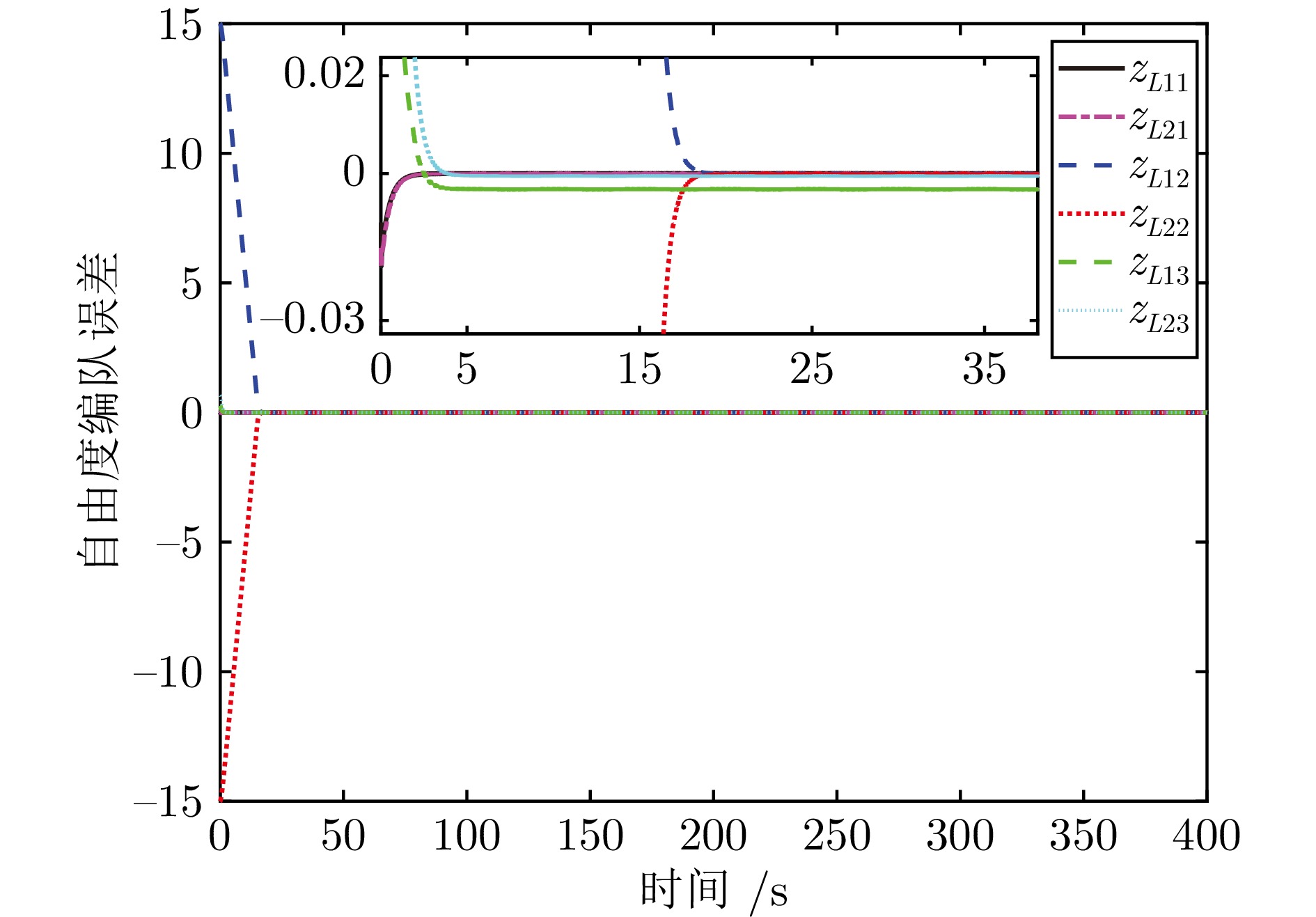
图 11 线性滑模控制的编队误差收敛曲线
Fig. 11 Formationerror convergence curve of linear sliding mode control
-
[1] 张卫东, 刘笑成, 韩鹏. 水上无人系统研究进展及其面临的挑战. 自动化学报, 2020, 46(5): 847−857Zhang Wei-Dong, Liu Xiao-Cheng, Han Peng. Progress and challenges of overwater unmanned systems. Acta Automatica Sinica, 2020, 46(5): 847−857 [2] 谢少荣, 刘坚坚, 张丹. 复杂海况无人艇集群控制技术研究现状与发展. 水下无人系统学报, 2020, 28(6): 584−596 doi: 10.11993/j.issn.2096-3920.2020.06.001Xie Shao-Rong, Liu Jian-Jian, Zhang Dan. Current development of control technology for unmanned surface vessel clusters under complex sea conditions. Journal of Unmanned Undersea Systems, 2020, 28(6): 584−596 doi: 10.11993/j.issn.2096-3920.2020.06.001 [3] Wu G, Xu T, Sun Y, Zhang J. Review of multiple unmanned surface vessels collaborative search and hunting based on swarm intelligence. International Journal of Advanced Robotic Systems, 2022, 19(2): 1729−1735 [4] Liu H, Zhang H, Meng D, SU H. Scanning-Chain formation control for multiple unmanned surface vessels to pass through water channels. IEEE Transactions on Cybernetics, 2022, 52(3): 1850−1861 doi: 10.1109/TCYB.2020.2997833 [5] Liu Z, Hou H, Wang Y. Formation-containment control of multiple underactuated surface vessels with sampling communication via hierarchical sliding mode approach. ISA Transactions, 2022, 124: 458−467 doi: 10.1016/j.isatra.2019.12.003 [6] Liang X, Qu X, Hou Y, Li Y, Zhang R. Distributed coordinated tracking control of multiple unmanned surface vehicles under complex marine environments. Ocean Engineering, 2020, 205: Article No. 107328 doi: 10.1016/j.oceaneng.2020.107328 [7] 李贺, 王宁, 薛皓原. 水面无人艇领航—跟随固定时间编队控制. 中国舰船研究, 2020, 15(2): 111−118Li He, Wang Ning, Xue Hao-Yuan. Leader-follower fixed-time formation control of unmanned surface vehicles. Chinese Journal of Ship Research, 2020, 15(2): 111−118 [8] Guo G, Gao Z, Dong K. Prescribed-time formation control of surface vessels with asymmetric constraints on LOS range and bearing angles. Nonlinear Dynamics, 2021, 104: 3701−3712 doi: 10.1007/s11071-021-06462-8 [9] Han Z, Wang Y, Sun Q. Straight-path following and formation control of USVs using distributed deep reinforcement learning and adaptive neural network. IEEE/CAA Journal of Automatica Sinica, 2023, 10(2): 572−574 doi: 10.1109/JAS.2023.123255 [10] Li D, Ge S, Lee T. Simultaneous arrival to origin convergence: sliding-mode control through the norm-normalized sign function. IEEE Transactions on Automatic Control, 2021, 67(4): 1966−1972 [11] Sanyal A, Bohn J. Finite-time stabilisation of simple mechanical systems using continuous feedback. International Journal of Control, 2015, 88(4): 783−791 doi: 10.1080/00207179.2014.974675 [12] Mung N, Golestani M. Energy-efficient disturbance observer-based attitude tracking control with fixed-time convergence for spacecraft. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3659−3668 doi: 10.1109/TAES.2022.3229290 [13] Jiang Y, Hu W. Fixed-time-synchronized consensus tracking of multi-agent systems. In: Proceedings of the 5th International Conference on Intelligent Autonomous Systems. Dalian, China: IEEE, 2022. 345-350 [14] Du J, Hu X, Krstić M, Sun Y. Robust dynamic positioning of ships with disturbances under input saturation. Automatica, 2016, 73: 207−214 doi: 10.1016/j.automatica.2016.06.020 [15] Do K. Practical control of underactuated ships. Ocean Engineering, 2010, 37(13): 1111−1119 doi: 10.1016/j.oceaneng.2010.04.007 [16] Dai S, He S, Ma Y, Yuan C. Distributed cooperative learning control of uncertain multiagent systems with prescribed performance and preserved connectivity. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(7): 3217−3229 doi: 10.1109/TNNLS.2020.3010690 [17] Moreno J A, Osorio M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Transactions on Automatic Control, 2012, 57(4): 1035−1040 doi: 10.1109/TAC.2012.2186179 [18] Chen Q, Xu L, Zhou Y, Li S. Finite time observer-based super-twisting sliding mode control for vehicle platoons with guaranteed strong string stability. IET Intelligent Transport Systems, 2022, 16(12): 1726−1737 doi: 10.1049/itr2.12178 [19] 王宁, 王仁慧, 鲁挺. 推进器饱和约束的水面无人艇固定时间精准跟踪控制. 控制理论与应用, 2023, 40(1): 55−64Wang Ning, Wang Ren-Hui, Lu Ting. Fixed-time precision tracking control of an unmanned surface vehicle constrained by thruster saturations. Control Theory & Applications, 2023, 40(1): 55−64 [20] Xia G, Zhang Y, Zhang W, Zhang K, Yang H. Robust adaptive super-twisting sliding mode formation controller for homing of multi-underactuated AUV recovery system with uncertainties. ISA Transactions, 2022, 130: 136−151 doi: 10.1016/j.isatra.2022.04.010 [21] Li D, Tee K, Xie L, Yu H. Time-synchronized control for disturbed systems. IEEE Transactions on Cybernetics, 2022, 52(9): 8703−8715 doi: 10.1109/TCYB.2021.3054589 [22] Ouyang Y, Liu J, Sun C. Time-synchronized control for an uncertain marine vessel system with external disturbance. IEEE Transactions on Circuits and Systems II: Express Briefs, 2023, 70(8): 2929−2933 [23] Liu Z, Wang Y, Wang T. Incremental predictive control-based output consensus of networked unmanned surface vehicle formation systems. Information Sciences, 2018, 457-458: 166−181 doi: 10.1016/j.ins.2018.03.011 [24] Li H, Li X. Distributed consensus of heterogeneous linear time-varying systems on UAVs–USVs coordination. IEEE Transactions on Circuits and Systems II: Express Briefs, 2020, 67(7): 1264−1268 [25] Li T, Zhao R, Chen C, Fang L, Liu C. Finite-Time formation control of under-actuated ships using nonlinear sliding mode control. IEEE Transactions on Cybernetics, 2018, 48(11): 3243−3253 doi: 10.1109/TCYB.2018.2794968 [26] Li M, Guo C, Yu H. Line-of-sight-based global finite-time stable path following control of unmanned surface vehicles with actuator saturation. ISA Transactions, 2022, 125: 306−317 doi: 10.1016/j.isatra.2021.07.009 [27] Er M, Li Z. Formation control of unmanned surface vehicles using fixed-time non-singular terminal sliding mode strategy. Journal of Marine Science and Engineering, 2022, 10(9): Article No. 1308 doi: 10.3390/jmse10091308 [28] Shen H, Yin Y, Qian X. Fixed-time formation control for unmanned surface vehicles with parametric uncertainties and complex disturbance. Journal of Marine Science and Engineering, 2022, 10(9): 1246−1257 doi: 10.3390/jmse10091246 [29] Wu W, Tong S. Fixed-time formation fault tolerant control for unmanned surface vehicle systems with intermittent actuator faults. Ocean Engineering, 2023, 281: Aticle No. 114813 doi: 10.1016/j.oceaneng.2023.114813 [30] 王洪斌, 高静, 苏博, 王跃灵. 基于事件触发的AUVs固定时间编队控制. 自动化学报, 2022, 48(9): 2277−2287Wang Hong-Bin, Gao Jing, Su Bo, Wang Yue-Ling. Fixed-time formation of AUVs based on event-triggered control. Acta Automatica Sinica, 2022, 48(9): 2277−2287 [31] 高振宇, 郭戈. 基于扰动观测器的AUVs固定时间编队控制. 自动化学报, 2019, 45(6): 1094−1102Gao Zhen-Yu, Guo Ge. Fixed-time formation control of AUVs based on a disturbance observer. Acta Automatica Sinica, 2019, 45(6): 1094−1102 [32] Li D, Yu H, Tee K P, Wu Y, Ge S S, Lee T H. On time-synchronized stability and control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 52(4): 2450−2463 [33] 尹曌, 贺威, 邹尧, 穆新星, 孙长银. 基于“雁阵效应”的扑翼飞行机器人高效集群编队研究. 自动化学报, 2021, 47(6): 1355−1367Yin Zhao, He Wei, Zou Yao, Mu Xin-Xing, Sun Chang-Yin. Efficient formation of flapping-wing aerial vehicles based on wild geese queue effect. Acta Automatica Sinica, 2021, 47(6): 1355−1367 [34] Xiao B, Dong Q, Ye D, Liu L, Huo X. A general tracking control framework for uncertain systems with exponential convergence performance. IEEE/ASME Transactions on Mechatronics, 2017, 23(1): 111−120 -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 84
- HTML全文浏览量: 33
- 被引次数: 0
