

From Rule-driven to Collective Intelligence Emergence: A Review of Research on Multi-robot Air-ground Collaboration
-
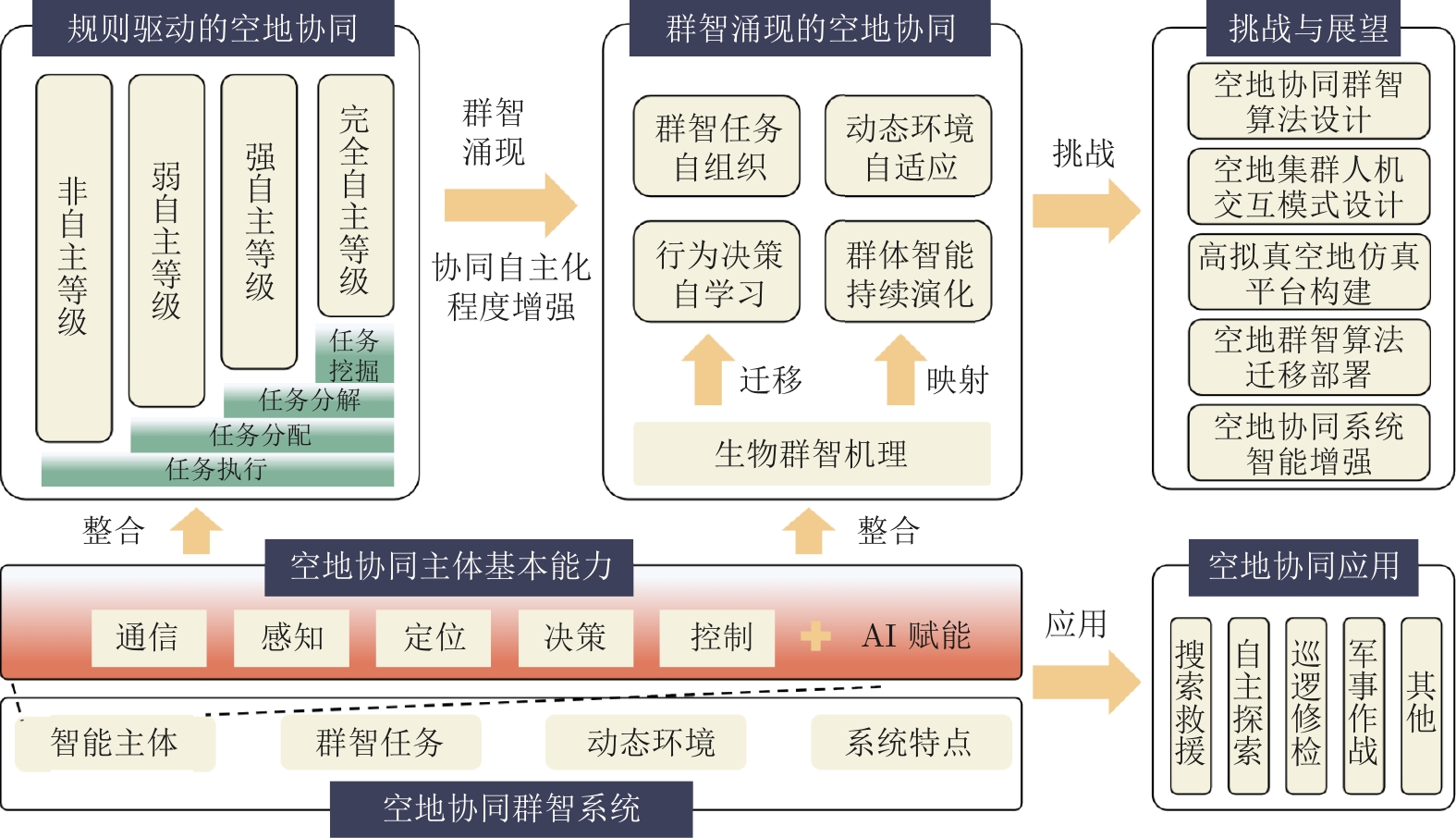
摘要: 多机器人空地协同系统作为一种在搜索救援、自主探索等领域具有广泛应用前景的异构机器人协作系统, 近年来受到研究者的高度关注. 针对限制空地协同系统自治性能的低智能性、弱自主性挑战, 如何增强个体智能、提高群体协同自主性是加快空地系统应用落地亟需解决的关键问题. 近年来, 随着以深度学习、群体智能为代表的人工智能(Artificial intelligence, AI)算法在感知、决策等领域的不断发展, 将其应用于空地协同系统成为了当前的研究热点. 基于空地协同的自主化程度, 总结从规则驱动到群智涌现不同协作水平下的空地协同工作, 强调通过增强个体智能涌现群体智慧. 同时, 构建并拓宽空地协同群智系统的概念及要素, 阐述其自组织、自适应、自学习与持续演化的群智特性. 最后, 通过列举空地协同代表性应用场景, 总结空地协同所面临的挑战, 并展望未来方向.Abstract: The multi-robot air-ground collaboration system, which is crucial for search and rescue, exploration, and other fields, has garnered significant attention from researchers in recent years. Overcoming challenges related to limited intelligence and weak autonomy in such systems is essential to enhance individual intelligence and strengthen collective collaboration autonomy, thereby accelerating their practical applications. In recent years, with the continuous advancement of artificial intelligence (AI) algorithms in perception and decision-making, such as deep learning and collective intelligence, their applications to air-ground collaborative systems have become a research hotspot. Based on the level of autonomy in air-ground collaboration, this paper summarizes air-ground collaboration efforts at different collaboration levels, ranging from rule-driven approaches to collective intelligence emergence, emphasizing the enhancement of individual intelligence to achieve collective intelligence. Furthermore, this paper constructs the concepts and expands the features of the air-ground collaboration collective intelligence system, and outlines its self-organizing, self-adaptation, self-learning, and continuously evolving qualities. Finally, by listing representative application scenarios, this paper encapsulates the challenges and explores future directions in air-ground collaboration.1)
1 1 《中华人民共和国民用航空法》 第七章第二节第七十五条规定 -
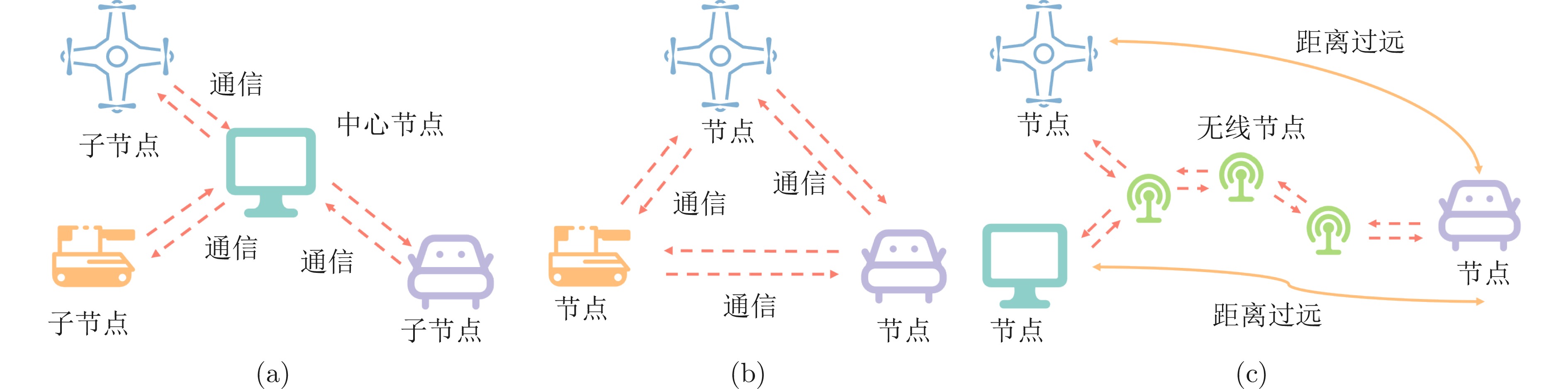
图 5 空地机器人无线通信((a) 集中式; (b) 分布式; (c) 移动自组织网络)
Fig. 5 Wireless communications of air-ground robots ((a) Centralized; (b) Distributed; (c) Mobile ad-hoc network)
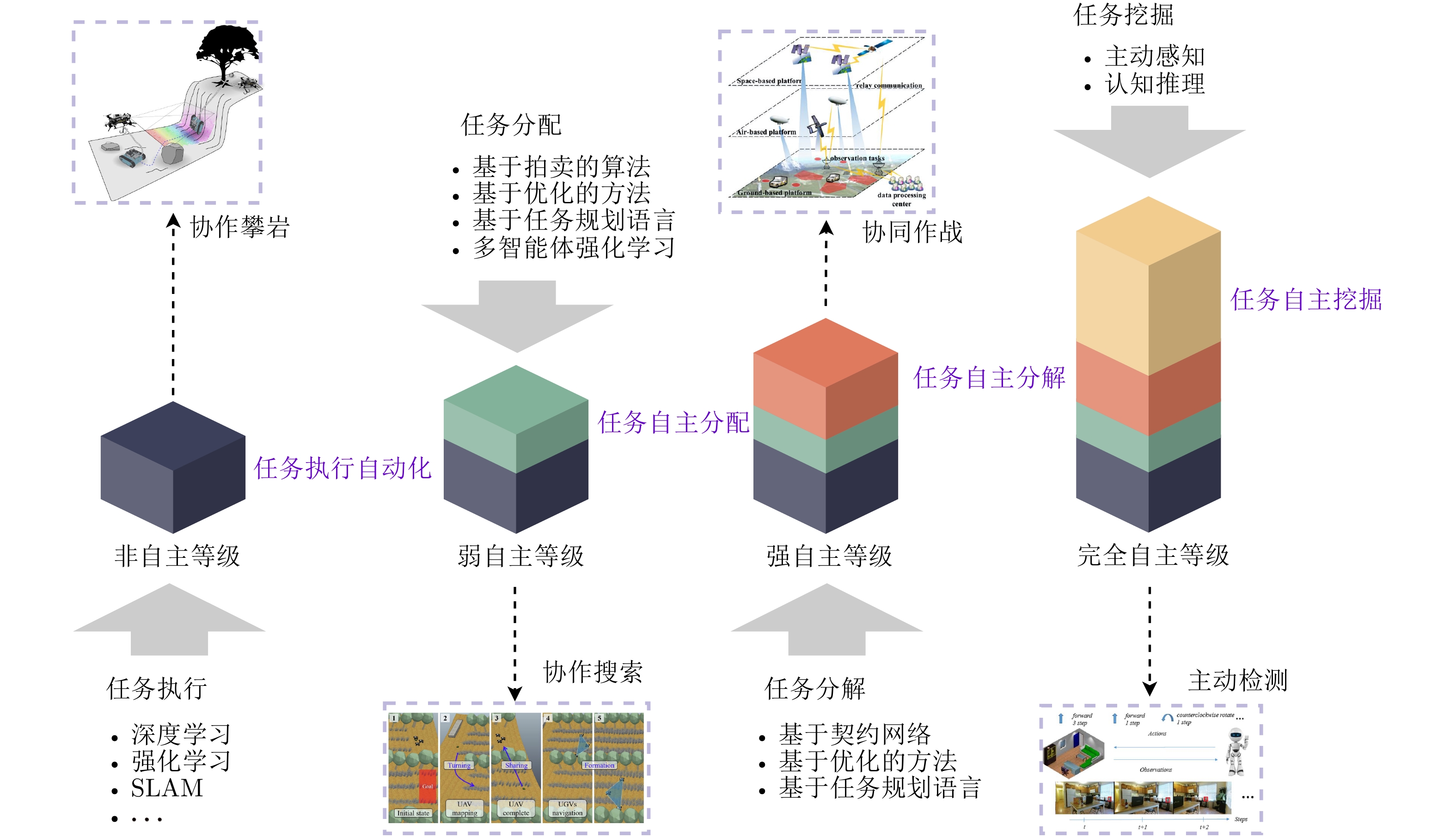
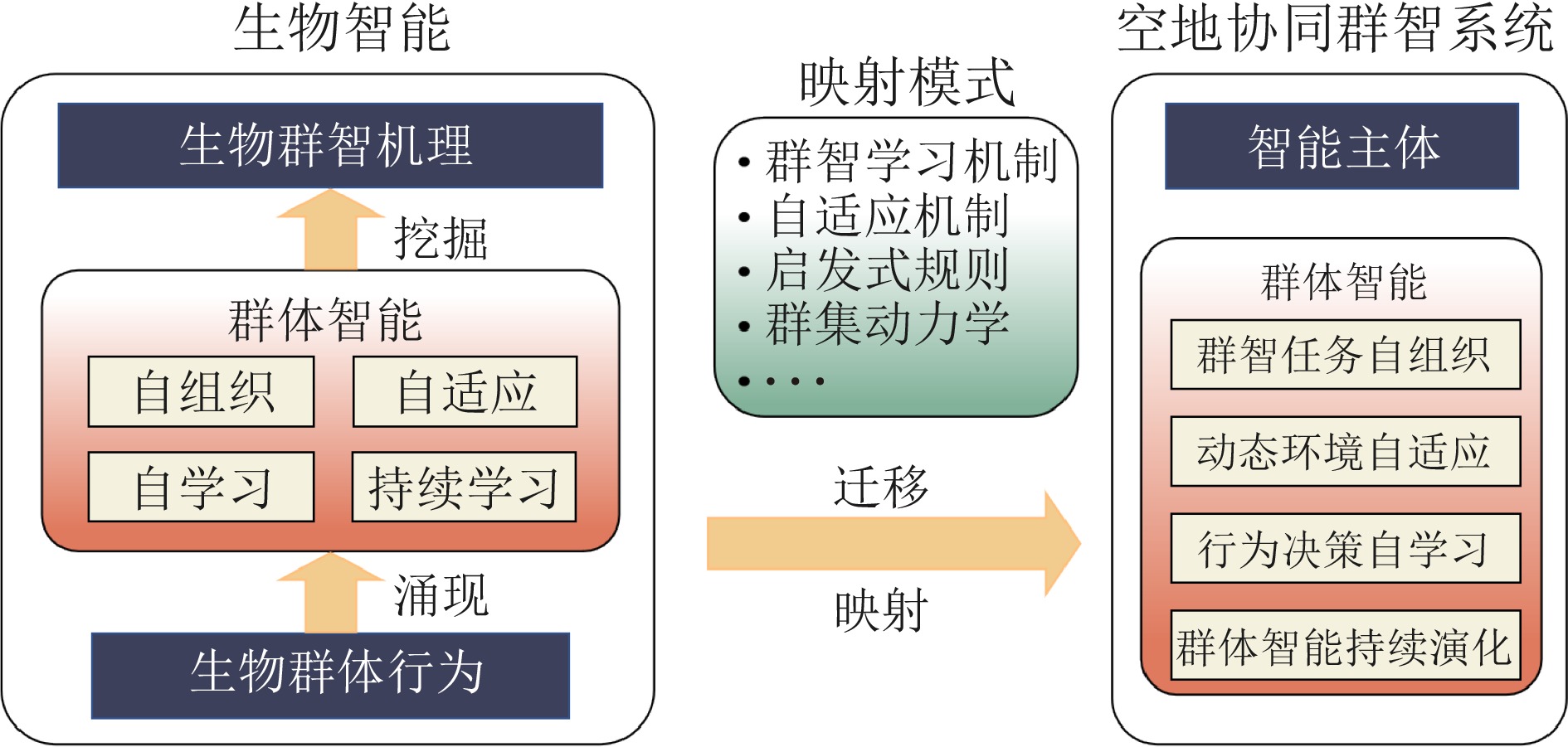
图 7 生物群智迁移映射空地协同群智系统
Fig. 7 Biological collective intelligence transfer and mapping air-ground collaboration collective intelligence system

表 1 通信方式分析
Table 1 Analysis of communication methods
通信方式 设备 常见任务 常见环境 通信范围 特点 研究代表 有线通信 光缆 搜索救援 范围有限的室外区域 取决于光缆长度 准确性高, 不易出错,
但会影响空地主体机动性[9, 48] 集中式 ZigBee WiFi节点 数据收集 室内, 范围有限的
室外区域0 ~ 100 m 依赖于中心节点, 准确性高,
但通信效率低[49−51] 分布式 WiFi节点 大规模建图 室外 与空地机器人数目成正比 不依赖中心节点, 鲁棒性强,
但通信范围有限[15, 53] 移动自组织网络 IEEE 802.11中继器
LoRA节点搜索救援 隧道等通信设施
缺乏的场景可随节点个数增加
不断扩大不依赖中心节点, 抗干扰能力强,
通信范围广, 灵活部署[9, 30, 42, 54]  下载: 导出CSV
下载: 导出CSV
表 2 空地协同中的语义分割算法应用总结
Table 2 Application summary of semantic segmentation algorithm in air-ground collaboration
下载: 导出CSV
表 5 空地协同等级分类方法总结
Table 5 Summary of classification methods for air-ground collaboration level
等级分类 代表研究 任务 方法 决策拓扑 实验环境 非自主等级协同 [9] 探索地下隧道 基于图的路径规划器, 地图融合算法 分布式 Sim2Real [80] 协作攀爬 未知环境可穿越性地形判断 集中式 Real 弱自主等级协同 [59] 探索地下隧道 BPMN表示法, 有限状态机 集中式 Real [112] 区域搜索 神经进化算法 分布式 Sim [108] 海上平台作业 多角色目标分配 集中式 Sim [110] 野外建图 规约语言, 确定性有限状态机 集中式 Sim [111] 目标跟踪 多智能体强化学习 分布式 Sim 强自主等级协同 [113] 提供通信计算服务 目标层次分解 分布式 Sim [114] 协同作战 PDDL模型, 基于图的任务分解 集中式 Sim [115] 提供通信计算服务 Lyapunov优化法 集中式 Sim
下载: 导出CSV
表 6 空地模拟器总结
Table 6 Summary of air-ground simulator
仿真环境 物理引擎 是否开源 特点 不足 Gazebo 支持ODE、Bullet、Simbody和DART 是 ROS集成使用, 支持多种插件 视觉渲染效果差 MORSE BGE 是 分布计算, 自由度可控 同步性差, 无法精确动力学建模 Pybullet Bullet 是 跨平台, 操作简单 运行效率慢 CoppeliaSim 支持ODE、Bullet和Vortex 是 分布式, 支持ROS接口,
支持多语言编程视觉渲染效果差, 运行效率慢 AirSim UE4 是 跨平台, 视觉逼真 动力学仿真效果差, 物理接口不足 Collaborative robots Sim ODE 否 基于Gazebo强物理交互 视觉渲染效果差, 运行速率慢 Gibson Env 神经网络 是 融入真实数据, 逼真的渲染效果 需要采集大量真实数据
下载: 导出CSV
-
[1] Xue S Y, Na J M, Wang L B, Wang S J, Xu X X. The outlook of green building development in China during the “fourteenth Five-Year Plan” period. International Journal of Environmental Research and Public Health, 2023, 20(6): Article No. 5122 doi: 10.3390/ijerph20065122 [2] Aguilar-Hernandez G A, Rodrigues J F D, Tukker A. Macroeconomic, social and environmental impacts of a circular economy up to 2050: A meta-analysis of prospective studies. Journal of Cleaner Production, 2021, 278: Article No. 123421 doi: 10.1016/j.jclepro.2020.123421 [3] Zhang K T, Chermprayong P, Xiao F, Tzoumanikas D, Dams B, Kay S, et al. Aerial additive manufacturing with multiple autonomous robots. Nature, 2022, 609(7928): 709−717 doi: 10.1038/s41586-022-04988-4 [4] Li S G, Batra R, Brown D, Chang H D, Ranganathan N, Hoberman C, et al. Particle robotics based on statistical mechanics of loosely coupled components. Nature, 2019, 567(7748): 361−365 doi: 10.1038/s41586-019-1022-9 [5] 蒲志强, 易建强, 刘振, 丘腾海, 孙金林, 李非墨. 知识和数据协同驱动的群体智能决策方法研究综述. 自动化学报, 2022, 48(3): 627−643Pu Zhi-Qiang, Yi Jian-Qiang, Liu Zhen, Qiu Teng-Hai, Sun Jin-Lin, Li Fei-Mo. Knowledge-based and data-driven integrating methodologies for collective intelligence decision making: A survey. Acta Automatica Sinica, 2022, 48(3): 627−643 [6] Ye Y X, Liu C H, Dai Z P, Zhao J X, Yuan Y, Wang G R, et al. Exploring both individuality and cooperation for air-ground spatial crowdsourcing by multi-agent deep reinforcement learning. In: Proceedings of the IEEE 39th International Conference on Data Engineering (ICDE). Anaheim, USA: IEEE, 2023. 205−217 [7] Zhao N, Lu W D, Sheng M, Chen Y F, Tang J, Yu F R, et al. UAV-assisted emergency networks in disasters. IEEE Wireless Communications, 2019, 26(1): 45−51 doi: 10.1109/MWC.2018.1800160 [8] Gao Y, Chen J F, Chen X, Wang C Y, Hu J J, Deng F Q, et al. Asymmetric self-play-enabled intelligent heterogeneous multirobot catching system using deep multiagent reinforcement learning. IEEE Transactions on Robotics, 2023, 39(4): 2603−2622 doi: 10.1109/TRO.2023.3257541 [9] Tranzatto M, Miki T, Dharmadhikari M, Bernreiter L, Kulkarni M, Mascarich F, et al. CERBERUS in the DARPA subterranean challenge. Science Robotics, 2022, 7(66): Article No. eabp9742 doi: 10.1126/scirobotics.abp9742 [10] He J H, Zhou Y M, Huang L X, Kong Y, Cheng H. Ground and aerial collaborative mapping in urban environments. IEEE Robotics and Automation Letters, 2021, 6(1): 95−102 doi: 10.1109/LRA.2020.3032054 [11] Girma A, Bahadori N, Sarkar M, Tadewos T G, Behnia M R, Mahmoud M N, et al. IoT-enabled autonomous system collaboration for disaster-area management. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1249−1262 doi: 10.1109/JAS.2020.1003291 [12] Schuster M J, Müller M G, Brunner S G, Lehner H, Lehner P, Sakagami R, et al. The ARCHES space-analogue demonstration mission: Towards heterogeneous teams of autonomous robots for collaborative scientific sampling in planetary exploration. IEEE Robotics and Automation Letters, 2020, 5(4): 5315−5322 doi: 10.1109/LRA.2020.3007468 [13] Zhang J H, Liu R Y, Yin K J, Wang Z Y, Gui M P, Chen S Y. Intelligent collaborative localization among air-ground robots for industrial environment perception. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9673−9681 doi: 10.1109/TIE.2018.2880727 [14] Gawel A, Lin Y K, Koutros T, Siegwart R, Cadena C. Aerial-ground collaborative sensing: Third-person view for teleoperation. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Philadelphia, USA: IEEE, 2018. 1−7 [15] Miller I D, Cladera F, Smith T, Taylor C J, Kumar V. Stronger together: Air-ground robotic collaboration using semantics. IEEE Robotics and Automation Letters, 2022, 7(4): 9643−9650 doi: 10.1109/LRA.2022.3191165 [16] Huo J W, Zenkevich S L, Nazarova A V, Zhai M X. Path planning based on map matching in UAV/UGV collaboration system. International Journal of Intelligent Unmanned Systems, 2021, 9(2): 81−95 doi: 10.1108/IJIUS-03-2019-0020 [17] Yang R H, Zhang M H, Hansen N, Xu H Z, Wang X L. Learning vision-guided quadrupedal locomotion end-to-end with cross-modal Transformers. arXiv: 2107.03996, 2022. [18] Silver D, Huang A, Maddison C J, Guez A, Sifre L, van den Driessche G, et al. Mastering the game of go with deep neural networks and tree search. Nature, 2016, 529(7587): 484−489 doi: 10.1038/nature16961 [19] Miki T, Lee J, Hwangbo J, Wellhausen L, Koltun V, Hutter M. Learning robust perceptive locomotion for quadrupedal robots in the wild. Science Robotics, 2022, 7(62): Article No. eabk2822 doi: 10.1126/scirobotics.abk2822 [20] Zhou X, Wen X Y, Wang Z P, Gao Y M, Li H J, Wang Q H, et al. Swarm of micro flying robots in the wild. Science Robotics, 2022, 7(66): Article No. eabm5954 doi: 10.1126/scirobotics.abm5954 [21] Hu D F, Gan V J L, Wang T, Ma L. Multi-agent robotic system (MARS) for UAV-UGV path planning and automatic sensory data collection in cluttered environments. Building and Environment, 2022, 221: Article No. 109349 doi: 10.1016/j.buildenv.2022.109349 [22] Ropero F, Muñoz P, R-Moreno M D. TERRA: A path planning algorithm for cooperative UGV–UAV exploration. Engineering Applications of Artificial Intelligence, 2019, 78: 260−272 doi: 10.1016/j.engappai.2018.11.008 [23] Duan H B, Liu S Q. Unmanned air/ground vehicles heterogeneous cooperative techniques: Current status and prospects. Science China Technological Sciences, 2010, 53(5): 1349−1355 doi: 10.1007/s11431-010-0122-4 [24] Chen J, Zhang X, Xin B, Fang H. Coordination between unmanned aerial and ground vehicles: A taxonomy and optimization perspective. IEEE Transactions on Cybernetics, 2016, 46(4): 959−972 doi: 10.1109/TCYB.2015.2418337 [25] Cajo R, Mac T T, Plaza D, Copot C, Keyser R D, Ionescu C. A survey on fractional order control techniques for unmanned aerial and ground vehicles. IEEE Access, 2019, 7: 66864−66878 doi: 10.1109/ACCESS.2019.2918578 [26] Ding Y L, Xin B, Chen J. A review of recent advances in coordination between unmanned aerial and ground vehicles. Unmanned Systems, 2021, 9(2): 97−117 doi: 10.1142/S2301385021500084 [27] Liu C, Zhao J, Sun N Y. A review of collaborative air-ground robots research. Journal of Intelligent & Robotic Systems, 2022, 106(3): Article No. 60 [28] 郭斌, 刘思聪, 於志文. 人机物融合群智计算. 北京: 机械工业出版社, 2022. 23−60Guo Bin, Liu Si-Cong, Yu Zhi-Wen. Crowd Intelligence With the Deep Fusion of Human, Machine, and Things. Beijing: Machinery Industry Press, 2022. 23−60 [29] Saboia M, Clark L, Thangavelu V, Edlund J A, Otsu K, Correa G J, et al. ACHORD: Communication-aware multi-robot coordination with intermittent connectivity. IEEE Robotics and Automation Letters, 2022, 7(4): 10184−10191 doi: 10.1109/LRA.2022.3193240 [30] Kulkarni M, Dharmadhikari M, Tranzatto M, Zimmermann S, Reijgwart V, Petris P D, et al. Autonomous teamed exploration of subterranean environments using legged and aerial robots. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 3306−3313 [31] Parker L E. Distributed intelligence: Overview of the field and its application in multi-robot systems. Journal of Physical Agents, 2008, 2 (1): 5−14 [32] Luckcuck M, Farrell M, Dennis L A, Dixon C, Fisher M. Formal specification and verification of autonomous robotic systems: A survey. ACM Computing Surveys (CSUR), 2020, 52(5): Article No. 100 [33] Lin P, Abney K, Bekey G. Robot ethics: Mapping the issues for a mechanized world. Artificial Intelligence, 2011, 175(5−6): 942−949 doi: 10.1016/j.artint.2010.11.026 [34] Russel S J, Norvig P. Artificial Intelligence: A Modern Approach. Upper Saddle River: Prentice Hall, 2010. 69−83 [35] Plocher G H. The German Air Force Versus Russia, 1942. New Zealand: Eschenburg Press, 2017. 3−5 [36] Cheng N, Xu W C, Shi W S, Zhou Y, Lu N, Zhou H B, et al. Air-ground integrated mobile edge networks: Architecture, challenges, and opportunities. IEEE Communications Magazine, 2018, 56(8): 26−32 doi: 10.1109/MCOM.2018.1701092 [37] Qin Z, He S S, Wang H, Qu Y B, Dai H P, Xiong F, et al. Air-ground collaborative mobile edge computing: Architecture, challenges, and opportunities. China Communications, 2024, 21(5): 1−16 [38] Michael N, Shen S J, Mohta K, Mulgaonkar Y, Kumar V, Nagatani K, et al. Collaborative mapping of an earthquake damaged building via ground and aerial robots. Journal of Field Robotics, 2012, 29(5): 832−841 doi: 10.1002/rob.21436 [39] Christie G, Shoemaker A, Kochersberger K, Tokekar P, Mclean L, Leonessa A. Radiation search operations using scene understanding with autonomous UAV and UGV. Journal of Field Robotics, 2017, 34(8): 1450−1468 doi: 10.1002/rob.21723 [40] Krizmancic M, Arbanas B, Petrovic T, Petric F, Bogdan S. Cooperative aerial-ground multi-robot system for automated construction tasks. IEEE Robotics and Automation Letters, 2020, 5(2): 798−805 doi: 10.1109/LRA.2020.2965855 [41] Sycara K P. Multiagent systems. AI Magazine, 1998, 19(2): 79−92 [42] Ginting M F, Otsu K, Edlund J A, Gao J, Agha-Mohammadi A A. CHORD: Distributed data-sharing via hybrid ROS 1 and 2 for multi-robot exploration of large-scale complex environments. IEEE Robotics and Automation Letters, 2021, 6(3): 5064−5071 doi: 10.1109/LRA.2021.3061393 [43] Rizk Y, Awad M, Tunstel E W. Cooperative heterogeneous multi-robot systems: A survey. ACM Computing Surveys (CSUR), 2020, 52(2): Article No. 29 [44] Liu Y, Shi J M, Liu Z, Huang J C, Zhou T R. Two-layer routing for high-voltage powerline inspection by cooperated ground vehicle and drone. Energies, 2019, 12(7): Article No. 1385 doi: 10.3390/en12071385 [45] Kiener J, Stryk O V. Towards cooperation of heterogeneous, autonomous robots: A case study of humanoid and wheeled robots. Robotics and Autonomous Systems, 2010, 58(7): 921−929 doi: 10.1016/j.robot.2010.03.013 [46] Sarfati R, Hayes J C, Peleg O. Self-organization in natural swarms of Photinus carolinus synchronous fireflies. Science Advances, 2021, 7(28): Article No. eabg9259 doi: 10.1126/sciadv.abg9259 [47] Yan Z, Jouandeau N, Cherif A A. A survey and analysis of multi-robot coordination. International Journal of Advanced Robotic Systems, 2013, 10(12): Article No. 399 doi: 10.5772/57313 [48] Tranzatto M, Mascarich F, Bernreiter L, Godinho C, Camurri M, Khattak S, et al. CERBERUS: Autonomous legged and aerial robotic exploration in the tunnel and urban circuits of the DARPA subterranean challenge. Field Robotics, 2022, 2(1): 274−324 doi: 10.55417/fr.2022011 [49] Harik E H C, Guinand F, Pelvillain H, Guérin F, Brethé J F. A decentralized interactive architecture for aerial and ground mobile robots cooperation. In: Proceedings of the International Conference on Control, Automation and Robotics. Singapore: IEEE, 2015. 37−43 [50] Chen J, Chen Z Z, Fang M, Li J Q, Ming Z, Wang S L. A GAN-based active terrain mapping for collaborative air-ground robotic system. In: Proceedings of the IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM). Toyonaka, Japan: IEEE, 2019. 622−627 [51] Asadi K, Suresh A K, Ender A, Gotad S, Maniyar S, Anand S, et al. An integrated UGV-UAV system for construction site data collection. Automation in Construction, 2020, 112: Article No. 103068 doi: 10.1016/j.autcon.2019.103068 [52] Bupe P, Haddad R, Rios-Gutierrez F. Relief and emergency communication network based on an autonomous decentralized UAV clustering network. In: Proceedings of the SoutheastCon. Fort Lauderdale, USA: IEEE, 2015. 1−8 [53] Yue Y F, Zhao C Y, Wu Z Y, Yang C L, Wang Y Z, Wang D W. Collaborative semantic understanding and mapping framework for autonomous systems. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 978−989 doi: 10.1109/TMECH.2020.3015054 [54] Huang Y W, Lu C L, Chen K L, Ser P S, Huang J T, Shen Y C, et al. Duckiefloat: A collision-tolerant resource-constrained blimp for long-term autonomy in subterranean environments. arXiv: 1910.14275, 2019. [55] Nguyen H T, Garratt M, Bui L T, Abbass H. Supervised deep actor network for imitation learning in a ground-air UAV-UGVs coordination task. In: Proceedings of the IEEE Symposium Series on Computational Intelligence. Honolulu, USA: IEEE, 2017. 1−8 [56] Nouri N, Abouei J, Sepasian A R, Jaseemuddin M, Anpalagan A, Plataniotis K N. Three-dimensional multi-UAV placement and resource allocation for energy-efficient IoT communication. IEEE Internet of Things Journal, 2022, 9(3): 2134−2152 doi: 10.1109/JIOT.2021.3091166 [57] Mox D, Calvo-Fullana M, Gerasimenko M, Fink J, Kumar V, Ribeiro A. Mobile wireless network infrastructure on demand. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Paris, France: IEEE, 2020. 7726−7732 [58] Clark L, Edlund J A, Net M S, Vaquero T S, Agha-mohammadi A A. PropEM-L: Radio propagation environment modeling and learning for communication-aware multi-robot exploration. arXiv: 2205.01267, 2022. [59] Otsu K, Tepsuporn S, Thakker R, Vaquero T S, Edlund J A, Walsh W, et al. Supervised autonomy for communication-degraded subterranean exploration by a robot team. In: Proceedings of the IEEE Aerospace Conference. Big Sky, USA: IEEE, 2020. 1−9 [60] Guo Y L, Wang H Y, Hu Q Y, Liu H, Liu L, Bennamoun M. Deep learning for 3D point clouds: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(12): 4338−4364 doi: 10.1109/TPAMI.2020.3005434 [61] Peterson J, Chaudhry H, Abdelatty K, Bird J, Kochersberger K. Online aerial terrain mapping for ground robot navigation. Sensors, 2018, 18(2): Article No. 630 doi: 10.3390/s18020630 [62] Kruijff G J M, Kruijff-Korbayová I, Keshavdas S, Larochelle B, Janíček M, Colas F, et al. Designing, developing, and deploying systems to support human–robot teams in disaster response. Advanced Robotics, 2014, 28(23): 1547−1570 doi: 10.1080/01691864.2014.985335 [63] Delmerico J, Mueggler E, Nitsch J, Scaramuzza D. Active autonomous aerial exploration for ground robot path planning. IEEE Robotics and Automation Letters, 2017, 2(2): 664−671 doi: 10.1109/LRA.2017.2651163 [64] Chen L C, Papandreou G, Schroff F, Adam H. Rethinking atrous convolution for semantic image segmentation. arXiv: 1706.05587, 2017. [65] Hu W, Tan T N, Wang L, Maybank S. A survey on visual surveillance of object motion and behaviors. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2004, 34(3): 334−352 doi: 10.1109/TSMCC.2004.829274 [66] Mueggler E, Faessler M, Fontana F, Scaramuzza D. Aerial-guided navigation of a ground robot among movable obstacles. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics. Hokkaido, Japan: IEEE, 2014. 1−8 [67] Minaeian S, Liu J, Son Y J. Vision-based target detection and localization via a team of cooperative UAV and UGVs. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(7): 1005−1016 doi: 10.1109/TSMC.2015.2491878 [68] Zhao Z Q, Zheng P, Xu S T, Wu X D. Object detection with deep learning: A review. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(11): 3212−3232 doi: 10.1109/TNNLS.2018.2876865 [69] Howard A G, Zhu M L, Chen B, Kalenichenko D, Wang W J, Weyand T, et al. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv: 1704.04861, 2017. [70] Sandler M, Howard A, Zhu M L, Zhmoginov A, Chen L C. MobileNetV2: Inverted residuals and linear bottlenecks. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 4510−4520 [71] Redmon J, Farhadi A. YOLOv3: An incremental improvement. arXiv: 1804.02767, 2018. [72] Girshick R, Donahue J, Darrell T, Malik J. Rich feature hierarchies for accurate object detection and semantic segmentation. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Columbus, USA: IEEE, 2014. 580−587 [73] Girshick R. Fast R-CNN. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Santiago, Chile: IEEE, 2015. 1440−1448 [74] Yang T, Ren Q, Zhang F B, Xie B L, Ren H L, Li J, et al. Hybrid camera array-based UAV auto-landing on moving UGV in GPS-denied environment. Remote Sensing, 2018, 10(11): Article No. 1829 doi: 10.3390/rs10111829 [75] Krátký V, Petráček P, Báča T, Saska M. An autonomous unmanned aerial vehicle system for fast exploration of large complex indoor environments. Journal of Field Robotics, 2021, 38(8): 1036−1058 doi: 10.1002/rob.22021 [76] Hudson N, Talbot F, Cox M, Williams J, Hines T, Pitt A, et al. Heterogeneous ground and air platforms, homogeneous sensing: Team CSIRO Data61's approach to the DARPA subterranean challenge. Field Robotics, 2022, 2(1): 595−636 doi: 10.55417/fr.2022021 [77] Tychsen-Smith L, Petersson L. DeNet: Scalable real-time object detection with directed sparse sampling. In: Proceedings of the IEEE International Conference on Computer Vision (ICCV). Venice, Italy: IEEE, 2017. 428−436 [78] Redmon J, Divvala S, Girshick R, Farhadi A. You only look once: Unified, real-time object detection. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. 779−788 [79] Tung F, Mori G. Similarity-preserving knowledge distillation. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. Seoul, South Korea: IEEE, 2019. 1365−1374 [80] Miki T, Khrapchenkov P, Hori K. UAV/UGV autonomous cooperation: UAV assists UGV to climb a cliff by attaching a tether. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 8041−8047 [81] Fedorenko R, Gabdullin A, Fedorenko A. Global UGV path planning on point cloud maps created by UAV. In: Proceedings of the 3rd IEEE International Conference on Intelligent Transportation Engineering. Singapore: IEEE, 2018. 253−258 [82] Ebadi K, Chang Y, Palieri M, Stephens A, Hatteland A, Heiden E, et al. LAMP: Large-scale autonomous mapping and positioning for exploration of perceptually-degraded subterranean environments. In: Proceedings of the IEEE International Conference on Robotics and Automation. Paris, France: IEEE, 2020. 80−86 [83] Yu C, Liu Z X, Liu X J, Xie F G, Yang Y, Wei Q, et al. DS-SLAM: A semantic visual SLAM towards dynamic environments. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid, Spain: IEEE, 2018. 1168−1174 [84] Wu C C, Agarwal S, Curless B, Seitz S M. Multicore bundle adjustment. In: Proceedings of the 24th IEEE Conference on Computer Vision and Pattern Recognition. Colorado Springs, USA: IEEE, 2011. 3057−3064 [85] Furukawa Y, Ponce J. Accurate, dense, and robust multiview stereopsis. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(8): 1362−1376 doi: 10.1109/TPAMI.2009.161 [86] Zhang L L, Gao F, Deng F, Xi L L, Chen J. Distributed estimation of a layered architecture for collaborative air-ground target geolocation in outdoor environments. IEEE Transactions on Industrial Electronics, 2023, 70(3): 2822−2832 doi: 10.1109/TIE.2022.3165245 [87] Forster C, Pizzoli M, Scaramuzza D. Air-ground localization and map augmentation using monocular dense reconstruction. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 3971−3978 [88] Wu J A, Yang S W, Zhang Y J. Segment-based cross-domain localization between aerial and ground robots. In: Proceedings of the Chinese Automation Congress (CAC). Shanghai, China: IEEE, 2020. 5374−5381 [89] Majdik A L, Verda D, Albers-Schoenberg Y, Scaramuzza D. Air-ground matching: Appearance-based GPS-denied urban localization of micro aerial vehicles. Journal of Field Robotics, 2015, 32(7): 1015−1039 doi: 10.1002/rob.21585 [90] Petris P D, Khattak S, Dharmadhikari M, Waibel G, Nguyen H, Montenegr M, et al. Marsupial walking-and-flying robotic deployment for collaborative exploration of unknown environments. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Sevilla, Spain: IEEE, 2022. 188−194 [91] Qin H L, Meng Z H, Meng W, Chen X D, Sun H, Lin F, et al. Autonomous exploration and mapping system using heterogeneous UAVs and UGVs in GPS-denied environments. IEEE Transactions on Vehicular Technology, 2019, 68(2): 1339−1350 doi: 10.1109/TVT.2018.2890416 [92] Queralta J P, Li Q Q, Schiano F, Westerlund T. VIO-UWB-based collaborative localization and dense scene reconstruction within heterogeneous multi-robot systems. In: Proceedings of the International Conference on Advanced Robotics and Mechatronics (ICARM). Guilin, China: IEEE, 2022. 87−94 [93] Patle B K, Babu L G, Pandey A, Parhi D R K, Jagadeesh A. A review: On path planning strategies for navigation of mobile robot. Defence Technology, 2019, 15(4): 582−606 doi: 10.1016/j.dt.2019.04.011 [94] Shen C S, Zhang Y Z, Li Z M, Gao F, Shen S J. Collaborative air-ground target searching in complex environments. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Shanghai, China: IEEE, 2017. 230−237 [95] Stocco D M. A StAR search: Implications in controlling steroidogenesis. Biology of Reproduction, 1997, 56(2): 328−336 doi: 10.1095/biolreprod56.2.328 [96] Likhachev M, Ferguson D, Gordon G, Stentz A, Thrun S. Anytime dynamic A*: An anytime, replanning algorithm. In: Proceedings of the 15th International Conference on International Conference on Automated Planning and Scheduling. Monterey, USA: AAAI, 2005. 262−271 [97] Deng D, Jing W, Fu Y H, Huang Z Y, Liu J H, Shimada K. Constrained heterogeneous vehicle path planning for large-area coverage. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macao, China: IEEE, 2019. 4113−4120 [98] Dong L, He Z C, Song C W, Sun C Y. A review of mobile robot motion planning methods: From classical motion planning workflows to reinforcement learning-based architectures. Journal of Systems Engineering and Electronics, 2023, 34 (2): 439−459 [99] Yang Y, Li J T, Peng L L. Multi-robot path planning based on a deep reinforcement learning DQN algorithm. CAAI Transactions on Intelligence Technology, 2020, 5(3): 177−183 doi: 10.1049/trit.2020.0024 [100] Hussein A, Gaber M M, Elyan E, Jayne C. Imitation learning: A survey of learning methods. ACM Computing Surveys (CSUR), 2018, 50(2): Article No. 21 [101] Xiao X S, Liu B, Stone P. Agile robot navigation through hallucinated learning and sober deployment. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 7316−7322 [102] Wang Z H, Xiao X S, Nettekoven A J, Umasankar K, Singh A, Bommaka S, et al. From agile ground to aerial navigation: Learning from learned hallucination. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Prague, Czech Republic: IEEE, 2021. 148−153 [103] Duong T, Atanasov N. Hamiltonian-based neural ODE networks on the SE(3) manifold for dynamics learning and control. arXiv: 2106.12782, 2021. [104] Rodriguez-Ramos A, Sampedro C, Bavle H, Puente P D L, Campoy P. A deep reinforcement learning strategy for UAV autonomous landing on a moving platform. Journal of Intelligent & Robotic Systems, 2019, 93: 351−366 [105] Long P X, Fan T X, Liao X Y, Liu W X, Zhang H, Pan J. Towards optimally decentralized multi-robot collision avoidance via deep reinforcement learning. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Brisbane, Australia: IEEE, 2018. 6252−6259 [106] Skaltsis G M, Shin H S, Tsourdos A. A survey of task allocation techniques in MAS. In: Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS). Athens, Greece: IEEE, 2021. 488−497 [107] Kim M H, Baik H, Lee S. Resource welfare based task allocation for UAV team with resource constraints. Journal of Intelligent & Robotic Systems, 2015, 77: 611−627 [108] Carreno Y, Pairet È, Petillot Y, Petrick R P A. Task allocation strategy for heterogeneous robot teams in offshore missions. In: Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems. Auckland, New Zealand: International Foundation for Autonomous Agents and Multiagent Systems, 2020. 222−230 [109] Phan C, Liu H H T. A cooperative UAV/UGV platform for wildfire detection and fighting. In: Proceedings of the Asia Simulation Conference——7th International Conference on System Simulation and Scientific Computing. Beijing, China: IEEE, 2008. 494−498 [110] Ju C, Son H I. Modeling and control of heterogeneous field robots under partial observation. Information Sciences, 2021, 580: 419−435 doi: 10.1016/j.ins.2021.08.071 [111] Yu Q F, Shen Z X, Pang Y J, Liu R. Proficiency constrained multi-agent reinforcement learning for environment-adaptive multi UAV-UGV teaming. In: Proceedings of the 17th IEEE International Conference on Automation Science and Engineering (CASE). Lyon, France: IEEE, 2021. 2114−2118 [112] Behjat A, Manjunatha H, Kumar P K, Jani A, Collins L, Ghassemi P, et al. Learning robot swarm tactics over complex adversarial environments. In: Proceedings of the International Symposium on Multi-robot and Multi-agent Systems (MRS). Cambridge, UK: IEEE, 2021. 83−91 [113] Deng M, Liu B J, Li S M, Du R H, Wu G H, Li H F, et al. A two-phase coordinated planning approach for heterogeneous earth-observation resources to monitor area targets. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(10): 6388−6403 doi: 10.1109/TSMC.2019.2962205 [114] Ding Y H, Wang N, Li X. An air-ground cooperative task decomposition method based on graph processing and PDDL. In: Proceedings of the International Conference on Autonomous Unmanned Systems (ICAUS 2021). Changsha, China: Springer, 2021. 239−247 [115] Liao H J, Zhou Z Y, Zhao X W, Wang Y. Learning-based queue-aware task offloading and resource allocation for space–air–ground-integrated power IoT. IEEE Internet of Things Journal, 2021, 8(7): 5250−5263 doi: 10.1109/JIOT.2021.3058236 [116] Han X N, Liu H P, Sun F C, Zhang X Y. Active object detection with multistep action prediction using deep Q-network. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3723−3731 doi: 10.1109/TII.2019.2890849 [117] Shi Y F, Wang N, Zheng J M, Zhang Y, Yi S, Luo W H, et al. Adaptive informative sampling with environment partitioning for heterogeneous multi-robot systems. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 11718−11723 [118] Lesser V R. Evolution of the GPGP/TAEMS domain-independent coordination framework. In: Proceedings of the 1st International Joint Conference on Autonomous Agents and MultiAgent Systems: Part 1. Bologna, Italy: Springer, 2002. 1−2 [119] Decker K S, Lesser V R. Designing a family of coordination algorithms. In: Proceedings of the 1st International Conference on MultiAgent Systems. San Francisco, USA: ICMAS, 1995. 73−80 [120] Haslum P, Lipovetzky N, Magazzeni D, Muise C. An Introduction to the Planning Domain Definition Language. Cham: Springer, 2019. 9−18 [121] Pulvermüller F, Fadiga L. Active perception: Sensorimotor circuits as a cortical basis for language. Nature Reviews Neuroscience, 2010, 11(5): 351−360 doi: 10.1038/nrn2811 [122] Chang D, Johnson-Roberson M, Sun J. An active perception framework for autonomous underwater vehicle navigation under sensor constraints. IEEE Transactions on Control Systems Technology, 2022, 30(6): 2301−2316 doi: 10.1109/TCST.2021.3139307 [123] Liu X, Zhang F J, Hou Z Y, Mian L, Wang Z Y, Zhang J, et al. Self-supervised learning: Generative or contrastive. IEEE Transactions on Knowledge and Data Engineering, 2023, 35(1): 857−876 [124] Li Y P, Zhang D B, Yin F, Zhang Y. Cleaning robot operation decision based on causal reasoning and attribute learning. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 6878−6885 [125] Zion M Y B, Fersula J, Bredeche N, Dauchot O. Morphological computation and decentralized learning in a swarm of sterically interacting robots. Science Robotics, 2023, 8(75): Article No. eabo6140 doi: 10.1126/scirobotics.abo6140 [126] Wu L, Huang X D, Cui J G, Liu C, Xiao W S. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Systems With Applications, 2023, 215: Article No. 119410 doi: 10.1016/j.eswa.2022.119410 [127] Hart D, Sussman R W. The influence of predation on primate and early human evolution: Impetus for cooperation. Origins of Altruism and Cooperation, 2011 : 19−40 [128] Egerton F N. Changing concepts of the balance of nature. The Quarterly Review of Biology, 1973, 48(2): 322−350 doi: 10.1086/407594 [129] Stahler D, Heinrich B, Smith D. Common ravens, Corvus corax, preferentially associate with grey wolves, Canis lupus, as a foraging strategy in winter. Animal Behaviour, 2002, 64(2): 283−290 doi: 10.1006/anbe.2002.3047 [130] Nandakumar S C, Harper S, Mitchell D, Blanche J, Lim T, Yamamoto I, et al. Bio-inspired multi-robot autonomy. arXiv: 2203.07718, 2022. [131] Ni J J, Wang X T, Tang M, Cao W D, Shi P F, Yang S X. An improved real-time path planning method based on dragonfly algorithm for heterogeneous multi-robot system. IEEE Access, 2020, 8: 140558−140568 doi: 10.1109/ACCESS.2020.3012886 [132] Nguyen D H. A nature-inspired distributed robust control design for ground-aerial vehicle cooperation. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(4): 4454−4463 doi: 10.1109/TITS.2022.3229336 [133] Zhang J, Yu Z T, Mao S W, Periaswamy S C G, Patton J, Xia X. IADRL: Imitation augmented deep reinforcement learning enabled UGV-UAV coalition for tasking in complex environments. IEEE Access, 2020, 8: 102335−102347 doi: 10.1109/ACCESS.2020.2997304 [134] Manjunatha H, Distefano J P, Jani A, Ghassemi P, Chowdhury S, Dantu K, et al. Using physiological measurements to analyze the tactical decisions in human swarm teams. In: Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC). Toronto, Canda: IEEE, 2020. 256−261 [135] Kudithipudi D, Aguilar-Simon M, Babb J, Bazhenov M, Blackiston D, Bongard J, et al. Biological underpinnings for lifelong learning machines. Nature Machine Intelligence, 2022, 4(3): 196−210 doi: 10.1038/s42256-022-00452-0 [136] Mathews N, Christensen A L, Stranieri A, Scheidler A, Dorigo M. Supervised morphogenesis: Exploiting morphological flexibility of self-assembling multirobot systems through cooperation with aerial robots. Robotics and Autonomous Systems, 2019, 112: 154−167 doi: 10.1016/j.robot.2018.11.007 [137] Sorokin M, Tan J, Liu C K, Ha S. Learning to navigate sidewalks in outdoor environments. IEEE Robotics and Automation Letters, 2022, 7(2): 3906−3913 doi: 10.1109/LRA.2022.3145947 [138] Dong Z Y, Wei P X, Lin L. Adversarially-aware robust object detector. In: Proceedings of the 17th European Conference on Computer Vision. Tel Aviv, Israel: Springer, 2022. 297−313 [139] Luo F M, Jiang S Y, Yu Y, Zhang Z Z, Zhang Y F. Adapt to environment sudden changes by learning a context sensitive policy. In: Proceedings of the 36th AAAI Conference on Artificial Intelligence. Virtual Event: AAAI, 2022. 7637−7646 [140] Liu S C, Lin Y Y, Zhou Z M, Nan K M, Liu H, Du J Z. On-demand deep model compression for mobile devices: A usage-driven model selection framework. In: Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services. Munich, Germany: ACM, 2018. 389−400 [141] Liu S C, Guo B, Ma K, Yu Z W, Du J Z. AdaSpring: Context-adaptive and runtime-evolutionary deep model compression for mobile applications. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2021, 5(1): Article No. 24 [142] Nygaard T F, Martin C P, Torresen J, Glette K, Howard D. Real-world embodied AI through a morphologically adaptive quadruped robot. Nature Machine Intelligence, 2021, 3(5): 410−419 doi: 10.1038/s42256-021-00320-3 [143] Li L, Wang S Q, Zhang Y Y, Song S Y, Wang C Q, Tan S C, et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Science Robotics, 2022, 7(66): Article No. eabm669 [144] Ye Z H, Wang K, Chen Y N, Jiang X H, Song G H. Multi-UAV navigation for partially observable communication coverage by graph reinforcement learning. IEEE Transactions on Mobile Computing, 2023, 22(7): 4056−4069 doi: 10.1109/TMC.2022.3146881 [145] Song X Y, Yang Y X, Choromanski K, Caluwaerts K, Gao W B, Finn C, et al. Rapidly adaptable legged robots via evolutionary meta-learning. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 3769−3776 [146] Parisi G I, Kemker R, Part J L, Kanan C, Wermter S. Continual lifelong learning with neural networks: A review. Neural Networks, 2019, 113: 54−71 doi: 10.1016/j.neunet.2019.01.012 [147] Park J S, O'Brien J, Cai C J, Morris M R, Liang P, Bernstein M S. Generative agents: Interactive simulacra of human behavior. In: Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology. San Francisco, USA: ACM, 2023. Article No. 2 [148] Johnson M T J, Stinchcombe J R. An emerging synthesis between community ecology and evolutionary biology. Trends in Ecology & Evolution, 2007, 22(5): 250−257 [149] Tokekar P, Vander Hook J, Mulla D, Isler V. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. IEEE Transactions on Robotics, 2016, 32(6): 1498−1511 doi: 10.1109/TRO.2016.2603528 [150] Niroui F, Zhang K C, Kashino Z, Nejat G. Deep reinforcement learning robot for search and rescue applications: Exploration in unknown cluttered environments. IEEE Robotics and Automation Letters, 2019, 4(2): 610−617 doi: 10.1109/LRA.2019.2891991 [151] Kruijff-Korbayová I, Colas F, Gianni M, Pirri F, Greeff J D, Hindriks K, et al. TRADR project: Long-term human-robot teaming for robot assisted disaster response. KI——Künstliche Intelligenz, 2015, 29(2): 193−201 [152] Yamauchi B. A frontier-based approach for autonomous exploration. In: Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation. Monterey, USA: IEEE, 1997. 146−151 [153] Agha A, Otsu K, Morrell B, Fan D D, Thakker R, Santamaria-Navarro A, et al. NeBula: Quest for robotic autonomy in challenging environments; TEAM CoSTAR at the DARPA subterranean challenge. arXiv: 2103.11470, 2021. [154] Yu H L, Meier K, Argyle M, Beard R W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEE/ASME Transactions on Mechatronics, 2015, 20(2): 541−552 doi: 10.1109/TMECH.2014.2301459 [155] Chen J Y C. UAV-guided navigation for ground robot tele-operation in a military reconnaissance environment. Ergonomics, 2010, 53(8): 940−950 doi: 10.1080/00140139.2010.500404 [156] Cantelli L, Mangiameli M, Melita C D, Muscato G. UAV/UGV cooperation for surveying operations in humanitarian demining. In: Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Linköping, Sweden: IEEE, 2013. 1−6 [157] Potena C, Khanna R, Nieto J, Siegwart R, Nardi D, Pretto A. AgriColMap: Aerial-ground collaborative 3D mapping for precision farming. IEEE Robotics and Automation Letters, 2019, 4(2): 1085−1092 doi: 10.1109/LRA.2019.2894468 [158] Pan Y, Li S N, Chen Q W, Zhang N, Chent T, Li Z G, et al. Efficient schedule of energy-constrained UAV using crowdsourced buses in last-mile parcel delivery. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, 2021, 5(1): Article No. 28 [159] Kirschstein T. Comparison of energy demands of drone-based and ground-based parcel delivery services. Transportation Research Part D: Transport and Environment, 2020, 78: Article No. 102209 doi: 10.1016/j.trd.2019.102209 [160] Peng K, Du J X, Lu F, Sun Q G, Dong Y, Zhou P, et al. A hybrid genetic algorithm on routing and scheduling for vehicle-assisted multi-drone parcel delivery. IEEE Access, 2019, 7: 49191−49200 doi: 10.1109/ACCESS.2019.2910134 [161] Chen Y, Chen M Q, Chen Z H, Cheng L, Yang Y H, Li H. Delivery path planning of heterogeneous robot system under road network constraints. Computers & Electrical Engineering, 2021, 92: Article No. 107197 [162] Couceiro M S, Portugal D, Ferreira J F, Rocha R P. SEMFIRE: Towards a new generation of forestry maintenance multi-robot systems. In: Proceedings of the IEEE/SICE International Symposium on System Integration. Paris, France: IEEE, 2019. 270−276 [163] Mathew N, Smith S L, Waslander S L. Multirobot rendezvous planning for recharging in persistent tasks. IEEE Transactions on Robotics, 2015, 31(1): 128−142 doi: 10.1109/TRO.2014.2380593 [164] Dorigo M, Theraulaz G, Trianni V. Reflections on the future of swarm robotics. Science Robotics, 2020, 5(49): Article No. eabe4385 doi: 10.1126/scirobotics.abe4385 [165] Reynolds C W. Flocks, herds and schools: A distributed behavioral model. In: Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. Anaheim, USA: ACM, 1987. 25−34 [166] Mirzaeinia A, Heppner F, Hassanalian M. An analytical study on leader and follower switching in V-shaped Canada Goose flocks for energy management purposes. Swarm Intelligence, 2020, 14(2): 117−141 doi: 10.1007/s11721-020-00179-x [167] Fierro R, Das A, Spletzer J, Esposito J, Kumar V, Ostrowski J P, et al. A framework and architecture for multi-robot coordination. The International Journal of Robotics Research, 2002, 21(10−11): 977−995 doi: 10.1177/0278364902021010981 [168] Wang W, Wang L, Wu J F, Tao X P, Wu H J. Oracle-guided deep reinforcement learning for large-scale multi-UAVs flocking and navigation. IEEE Transactions on Vehicular Technology, 2022, 71(10): 10280−10292 doi: 10.1109/TVT.2022.3184043 [169] Kannan S S, Venkatesh V L N, Min B C. SMART-LLM: Smart multi-agent robot task planning using large language models. arXiv: 2309.10062, 2024. [170] Wang F Y, Yang J, Wang X X, Li J J, Han Q L. Chat with ChatGPT on Industry 5.0: Learning and decision-making for intelligent industries. IEEE/CAA Journal of Automatica Sinica, 2023, 10(4): 831−834 doi: 10.1109/JAS.2023.123552 [171] Vemprala S H, Bonatti R, Bucker A, Kapoor A. ChatGPT for robotics: Design principles and model abilities. IEEE Access, 2024, 12: 55682−55696 doi: 10.1109/ACCESS.2024.3387941 [172] Yuan L Y, Gao X F, Zheng Z L, Edmonds M, Wu Y N, Rossano F, et al. In situ bidirectional human-robot value alignment. Science Robotics, 2022, 7(68): Article No. eabm4183 doi: 10.1126/scirobotics.abm4183 [173] Liu S J, Chang P X, Huang Z, Chakraborty N, Hong K W, Liang W H, et al. Intention aware robot crowd navigation with attention-based interaction graph. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, United Kingdom: IEEE, 2023. 12015−12021 [174] Schranz M, Caro G A D, Schmickl T, Elmenreich W, Arvin F, Şekercioğlu A, et al. Swarm intelligence and cyber-physical systems: Concepts, challenges and future trends. Swarm and Evolutionary Computation, 2021, 60: Article No. 100762 doi: 10.1016/j.swevo.2020.100762 [175] Koenig N, Howard A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Sendai, Japan: IEEE, 2004. 2149−2154 [176] Petrillo M D, Beard J, Gu Y, Gross J N. Search planning of a UAV/UGV team with localization uncertainty in a subterranean environment. IEEE Aerospace and Electronic Systems Magazine, 2021, 36(6): 6−16 doi: 10.1109/MAES.2021.3065041 [177] Greff K, Belletti F, Beyer L, Doersch C, Du Y L, Duckworth D, et al. Kubric: A scalable dataset generator. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. 3739−3751 [178] Shah S, Dey D, Lovett C, Kapoor A. AirSim: High-fidelity visual and physical simulation for autonomous vehicles. In: Proceedings of the 11th International Conference on Field and Service Robotics. Zurich, Switzerland: Springer, 2018. 621−635 [179] Liu H Y, Guo P, Jin X Y, Zhang H J, Deng H C, Xu K, et al. Collaborative robots Sim: A simulation environment of air-ground robots with strong physical interactivity. In: Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO). Sanya, China: IEEE, 2021. 1841−1847 [180] Echeverria G, Lassabe N, Degroote A, Lemaignan S. Modular open robots simulation engine: MORSE. In: Proceedings of the IEEE International Conference on Robotics and Automation. Shanghai, China: IEEE, 2011. 46−51 [181] Pitonakova L, Giuliani M, Pipe A, Winfield A. Feature and performance comparison of the V-REP, Gazebo and ARGoS robot simulators. In: Proceedings of the 19th Annual Conference on Towards Autonomous Robotic Systems. Bristol, UK: IEEE, 2018. 357−368 [182] Xia F, Zamir A R, He Z Y, Sax A, Malik J, Savarese S. Gibson Env: Real-world perception for embodied agents. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 9068−9079 [183] Yang Z Q, Zhang Q, Jiang Z L, Chen Z Q. Flocking of multi-agents with time delay. International Journal of Systems Science, 2012, 43(11): 2125−2134 doi: 10.1080/00207721.2011.564675 [184] Mekdad Y, Aris A, Babun L, Fergougui A E, Conti M, Lazzeretti R, et al. A survey on security and privacy issues of UAVs. Computer Networks, 2023, 224: Article No. 109626 doi: 10.1016/j.comnet.2023.109626 [185] 何道敬, 杜晓, 乔银荣, 朱耀康, 樊强, 罗旺. 无人机信息安全研究综述. 计算机学报, 2019, 42(5): 1076−1094 doi: 10.11897/SP.J.1016.2019.01076He Dao-Jing, Du Xiao, Qiao Yin-Rong, Zhu Yao-Kang, Fan Qiang, Luo Wang. A survey on cyber security of unmanned aerial vehicles. Chinese Journal of Computers, 2019, 42(5): 1076−1094 doi: 10.11897/SP.J.1016.2019.01076 [186] Sun G, Li J H, Wang A M, Wu Q Q, Sun Z M, Liu Y H. Secure and energy-efficient UAV relay communications exploiting collaborative beamforming. IEEE Transactions on Communications, 2022, 70(8): 5401−5416 doi: 10.1109/TCOMM.2022.3184160 [187] Zhao W S, Queralta J P, Westerlund T. Sim-to-real transfer in deep reinforcement learning for robotics: A survey. In: Proceedings of the IEEE Symposium Series on Computational Intelligence (SSCI). Canberra, Australia: IEEE, 2020. 737−744 [188] Tan J, Zhang T N, Coumans E, Iscen A, Bai Y F, Hafner D, et al. Sim-to-real: Learning agile locomotion for quadruped robots. arXiv: 1804.10332, 2018. [189] Tobin J, Fong R, Ray A, Schneider J, Zaremba W, Abbeel P. Domain randomization for transferring deep neural networks from simulation to the real world. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 23−30 [190] Bousmalis K, Silberman N, Dohan D, Erhan D, Krishnan D. Unsupervised pixel-level domain adaptation with generative adversarial networks. In: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Honolulu, USA: IEEE, 2017. 95−104 [191] Chebotar Y, Handa A, Makoviychuk V, Macklin M, Issac J, Ratliff N, et al. Closing the Sim-to-real loop: Adapting simulation randomization with real world experience. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 8973−8979 [192] Bogue R. Cloud robotics: A review of technologies, developments and applications. Industrial Robot: An International Journal, 2017, 44(1): 1−5 doi: 10.1108/IR-10-2016-0265 [193] Zhang P Y, Zhong Y X, Li X Q. SlimYOLOv3: Narrower, faster and better for real-time UAV applications. In: Proceedings of the IEEE/CVF International Conference on Computer Vision Workshop (ICCVW). Seoul, South Korea: IEEE, 2019. 37−45 [194] 刘亚波. 异构多机器人系统协同技术研究 [博士学位论文], 浙江大学, 中国, 2011.Liu Ya-Bo. The Coordination Approach for Heterogeneous Multi-robot Teams [Ph.D. dissertation], Zhejiang University, China, 2011. -

计量
- 文章访问数: 6643
- HTML全文浏览量: 410
- PDF下载量: 637
- 被引次数: 0
