

A Review of Task Allocation and Motion Planning for Multi-robot in Major Equipment Manufacturing
-
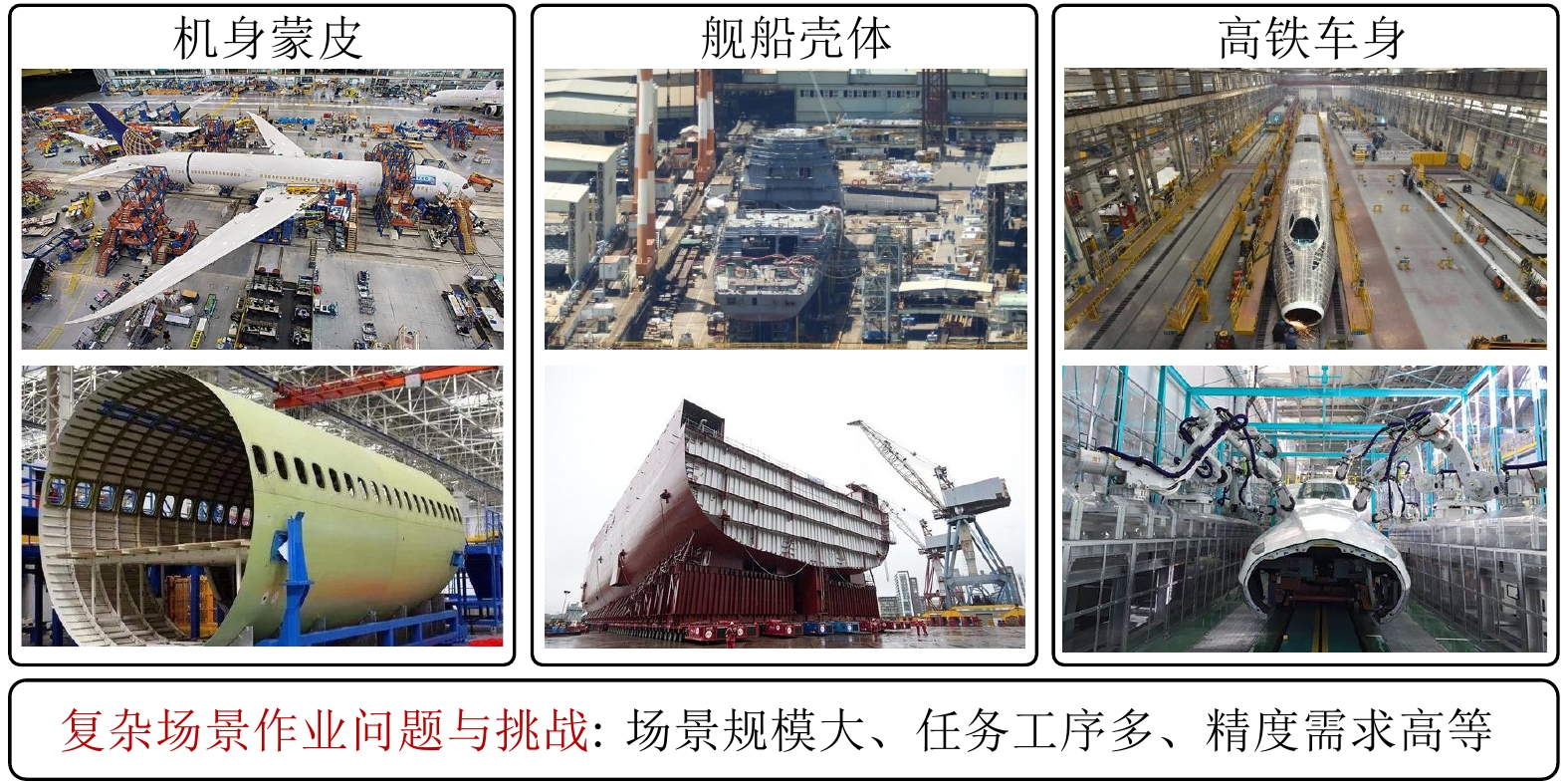
摘要: 飞机蒙皮、船舶舱体、高铁车身等大型复杂部件高效高品质制造是航空航天、海洋舰船、轨道交通等领域重大装备发展的根基. 大型复杂部件具有尺寸超大、型面复杂等特点, 传统的人工、单机制造面临着效率低、一致性差、空间有限等问题, 多机器人具有高鲁棒性、高效性等优点, 为大型复杂部件制造提供了良好的制造基础. 任务分配与运动规划是多机器人制造系统的决策中枢, 其性能影响整个系统的运行效率. 考虑到重大装备部件制造任务分配与运动规划过程中任务工序多、冲突干涉多、精度需求高等挑战, 本文首先对复杂环境下多机器人任务分配与运动规划的重要性进行了说明; 然后阐述了目前主要的任务分配与运动规划方法, 包括其在智能制造领域下的应用; 在此基础上, 对现阶段复杂场景下任务分配和运动规划存在的问题进行了分析, 并使用强化学习与混合优化算法等方法提出了解决思路; 最后对重大装备大型复杂部件制造过程多机器人任务分配和动态规划技术及应用的发展进行了总结与展望.Abstract: Large-scale complex components such as aircraft skin, ship cabin body, and high-speed rail body are manufactured with high-efficiency and high-quality, which is the foundation for developing major equipment such as aerospace, marine vessels, and rail transportation. Large-scale complex components have the characteristics of large size, complex shapes, traditional manual and single-robot manufacturing are faced with the problems of low efficiency, poor consistency, limited space, etc., multi-robot has the advantages of high robustness and efficiency and is widely used in large-scale complex components. Task allocation and motion planning constitute the decision center of multi-robot systems, whose performance affects the whole system’s efficiency. Firstly, considering the challenges in task allocation and motion planning of major equipment components manufacturing, such as multiple task processes, multiple conflict interference, and high precision requirements, the importance of task allocation and motion planning of multiple robots in complex environments is explained. Then the existing main methods task allocation and motion planning methods are described, including their applications in intelligent manufacturing. On this basis, the existing problems affecting task allocation and motion planning in complex scenarios are analyzed. The solution is proposed using reinforcement learning and a hybrid optimization algorithm. Finally, the development of task allocation and dynamic planning technology and the application of multi-robot in the large-scale complex components manufacturing processes prospect.
-
Key words:
- Major equipment manufacturing /
- multi-robot /
- task allocation /
- motion planning
-
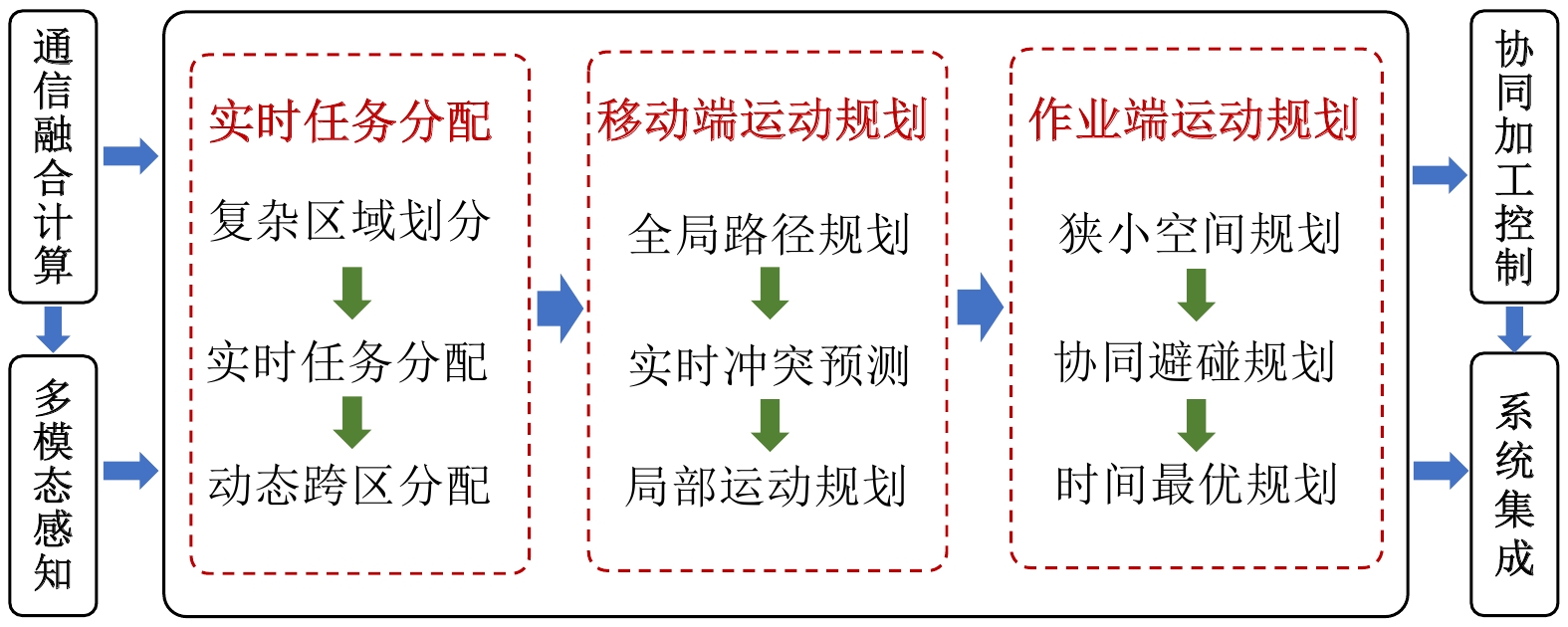
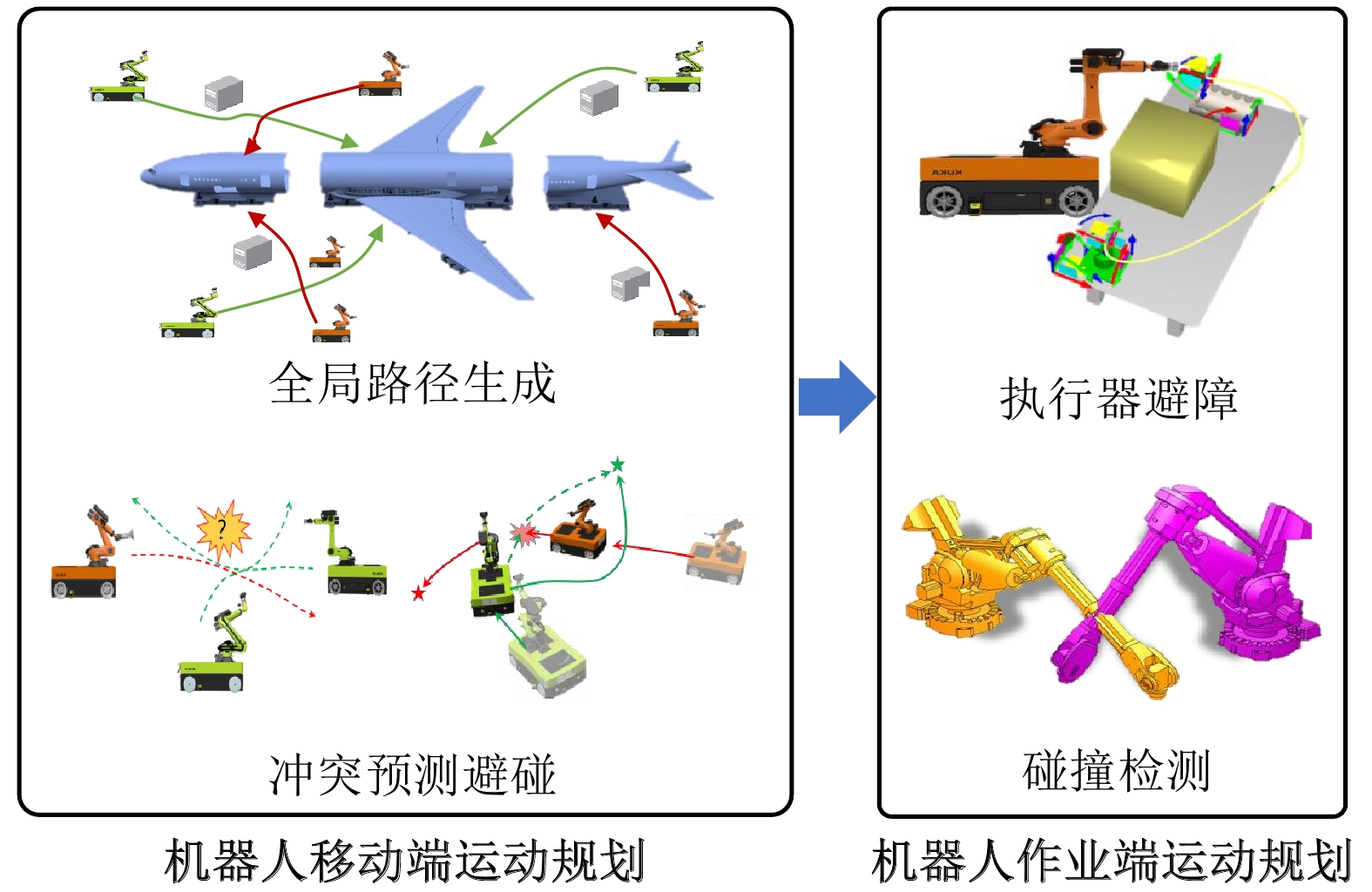
图 2 任务分配与运动规划在多机器人制造过程中的重要性
Fig. 2 The importance of task allocation and motion planning in multi-robot manufacturing
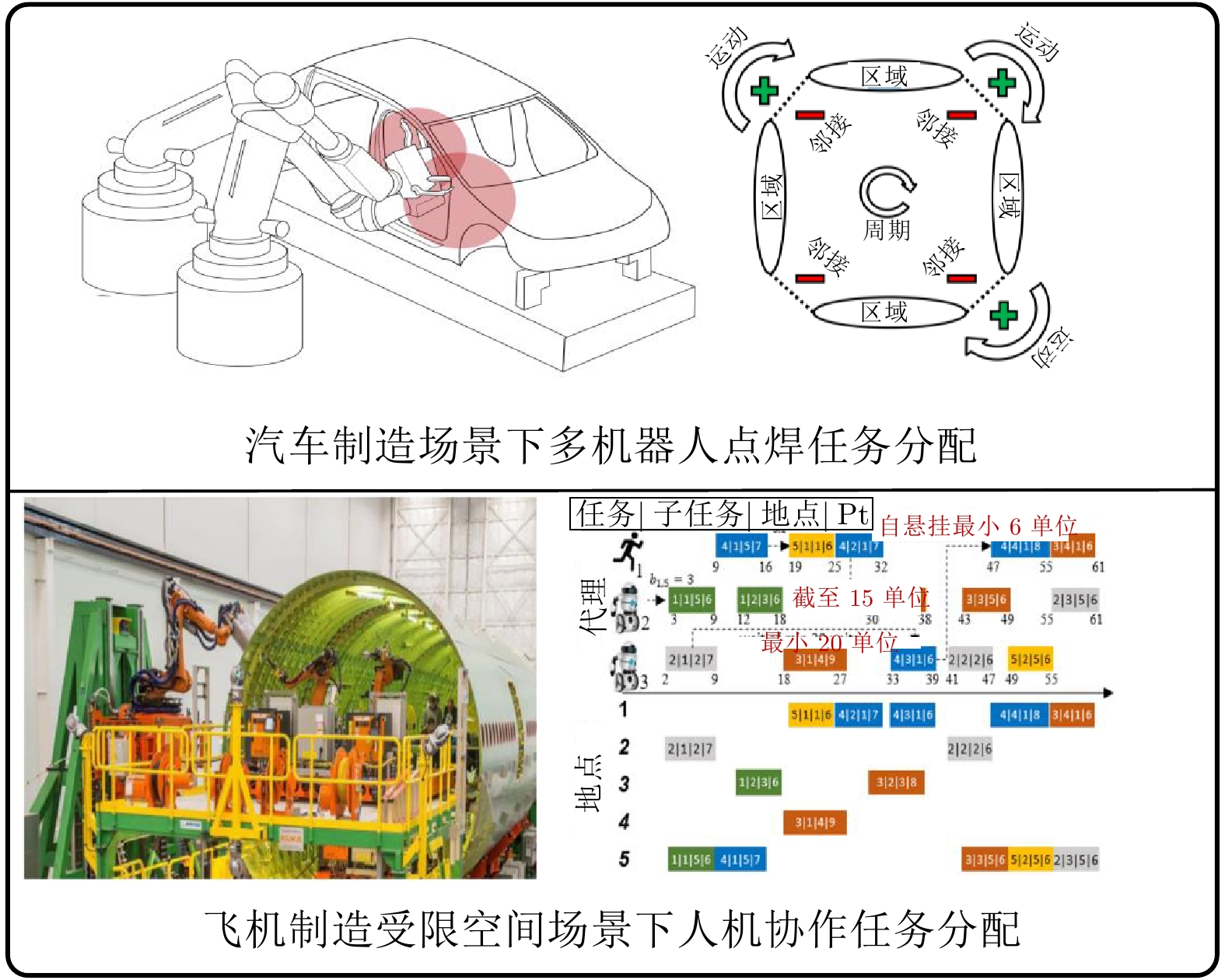
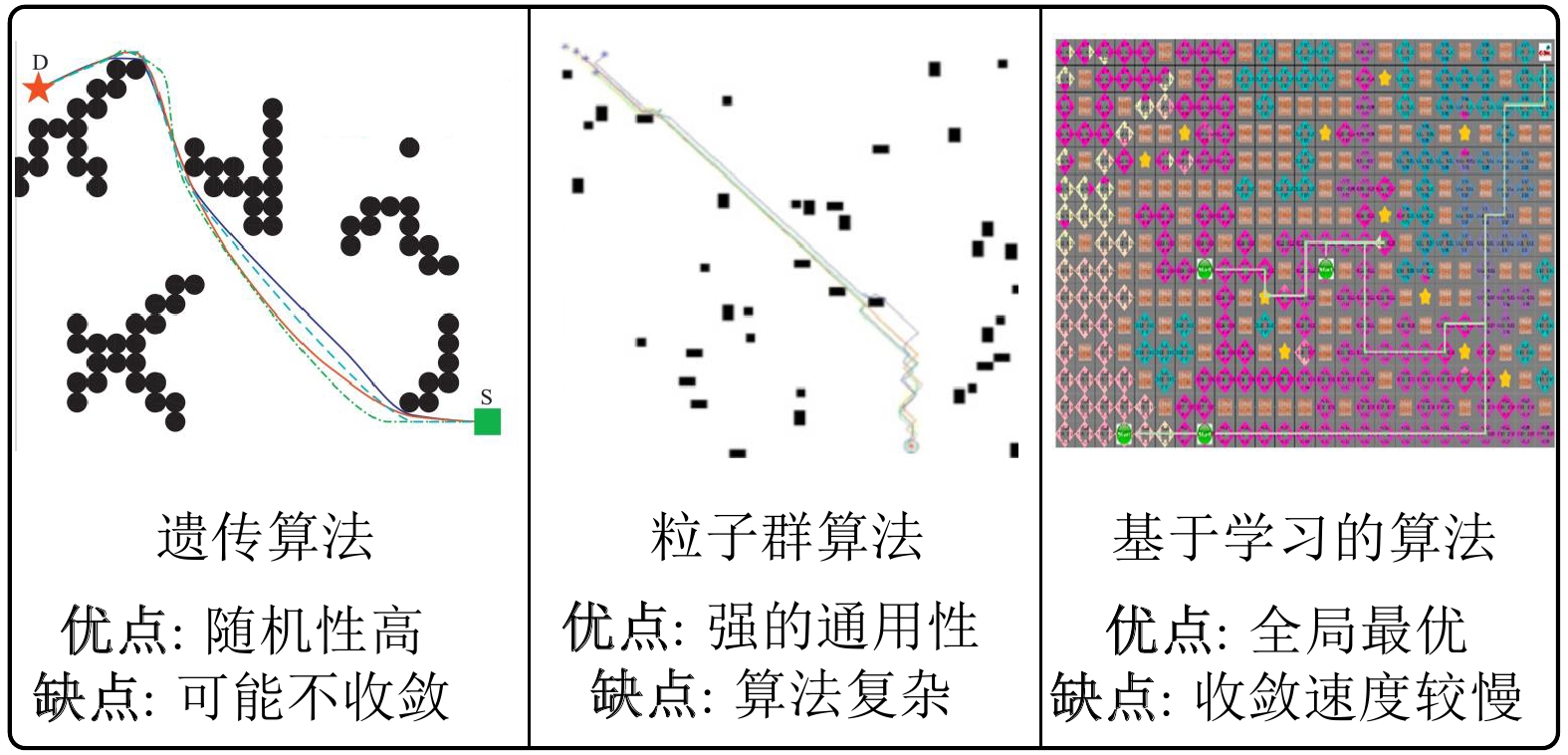
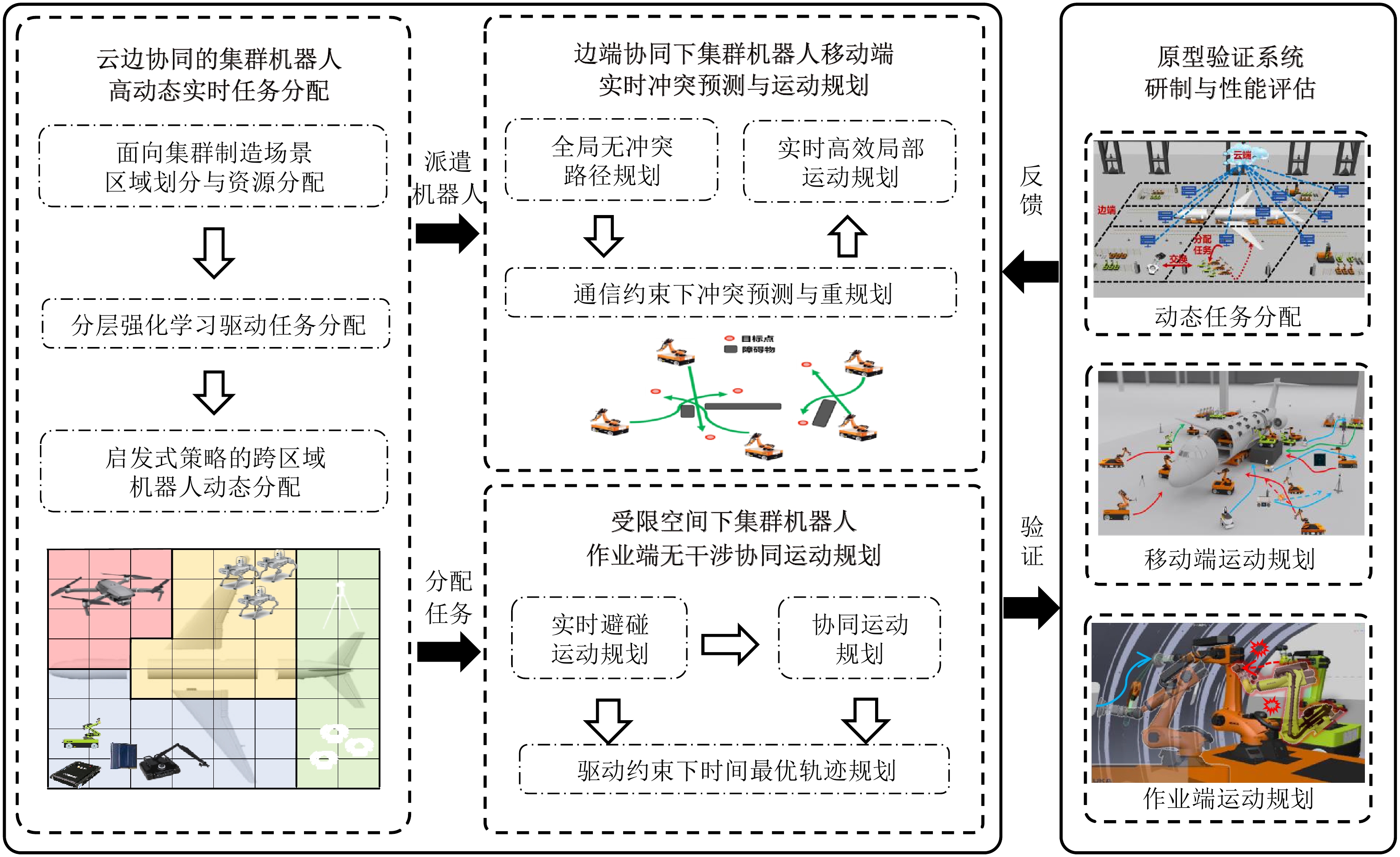
图 21 复杂环境下集群机器人任务分配与运动规划技术路线
Fig. 21 Technical route of task allocation and motion planning for cluster robots in complex environment
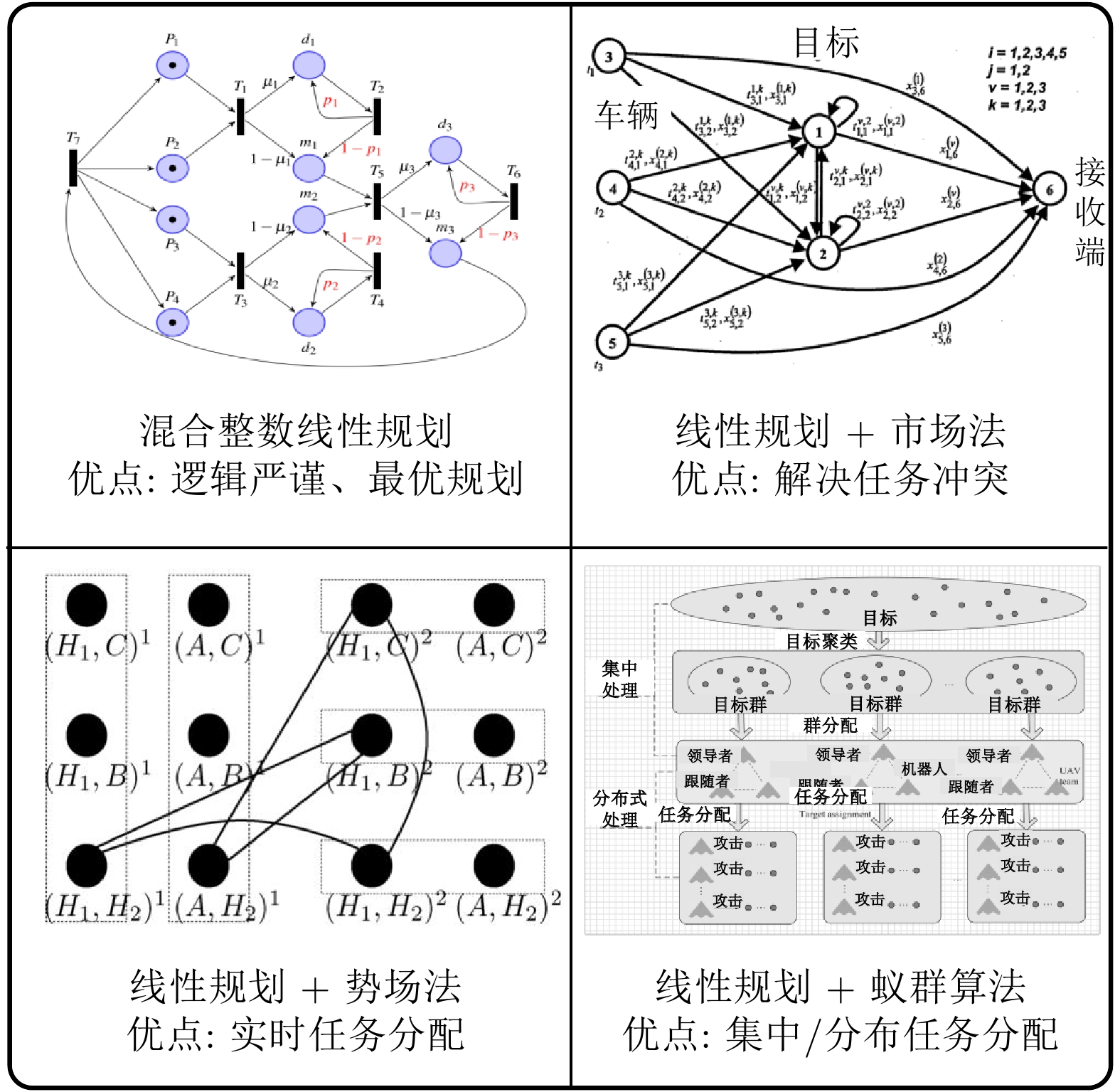
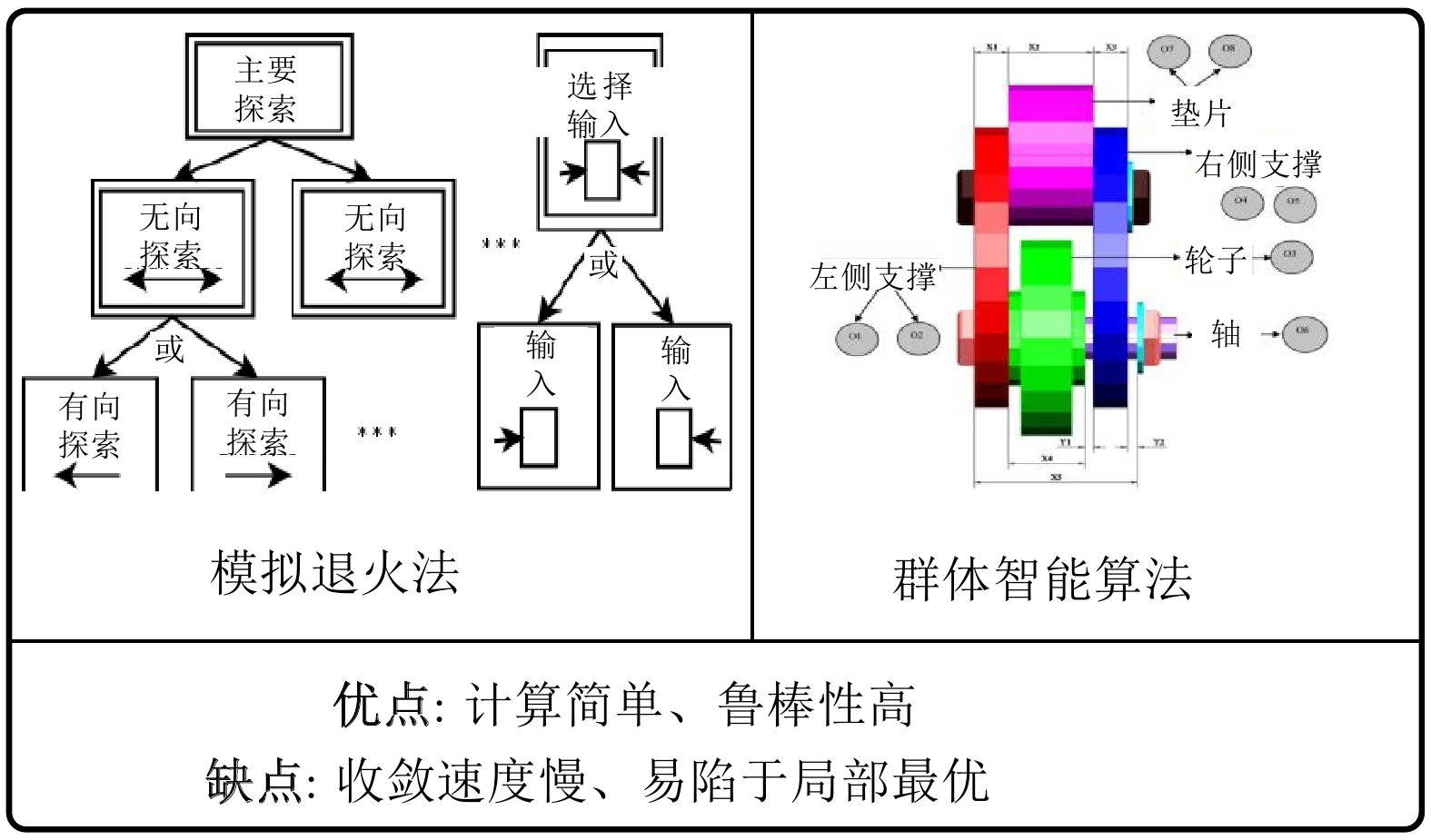
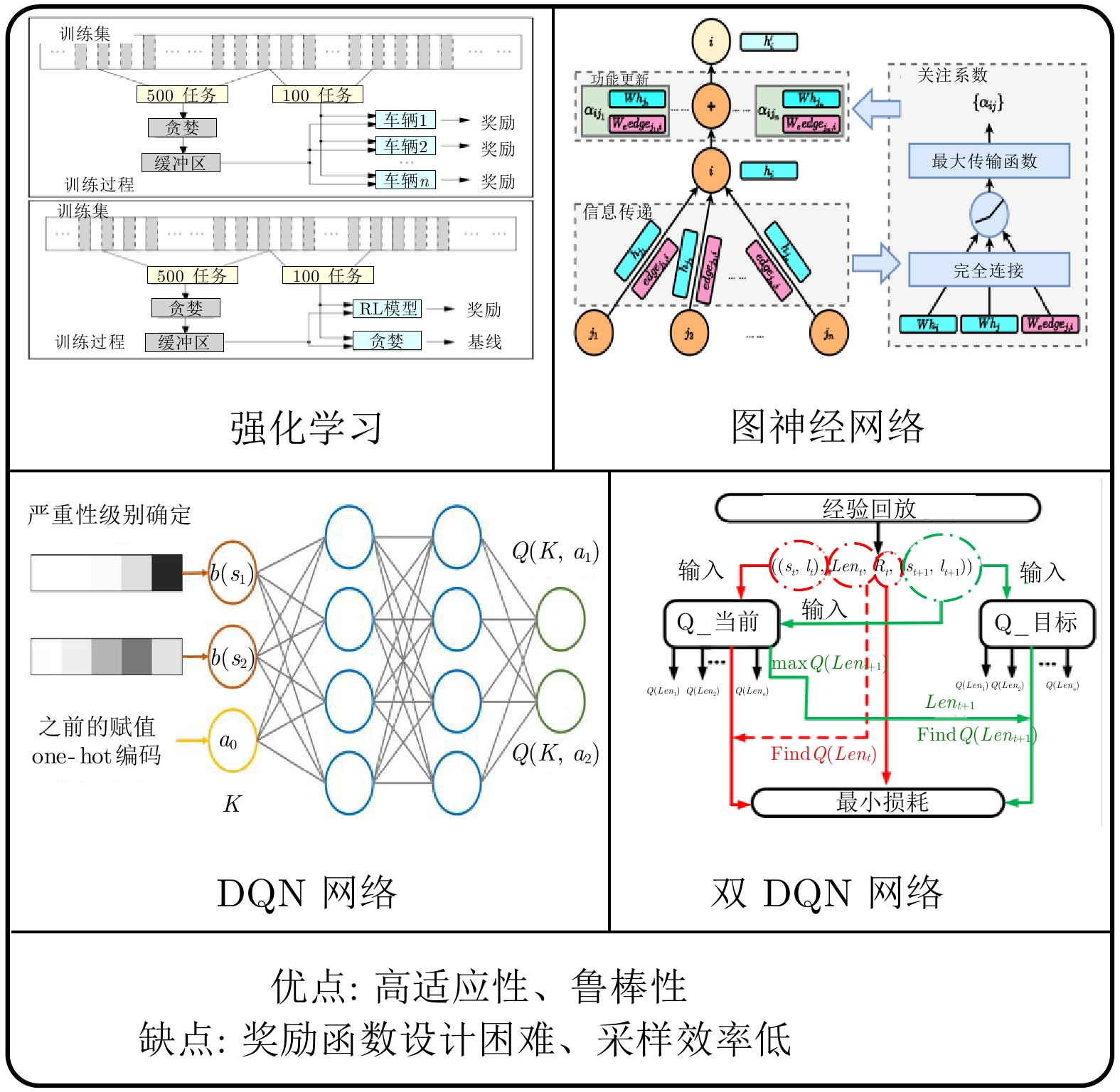
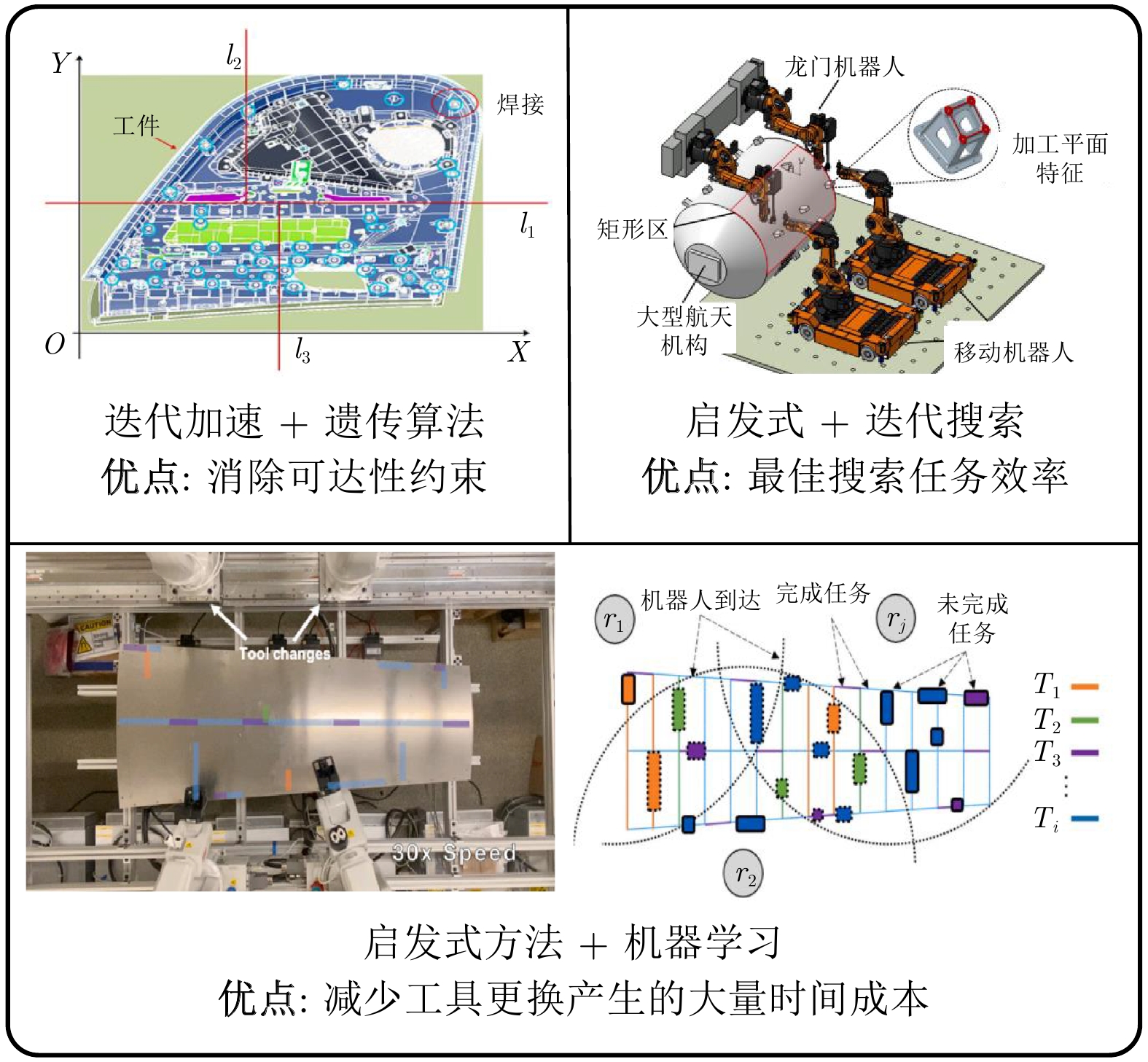
表 1 任务分配方法分析
Table 1 The analysis of task allocation
使用方法 执行模式 优点 缺点 应用 混合线性规划[28−33] 集中式 高严谨性、可获得全局最优解 随着问题规模复杂度呈指数增长 时间最优问题 模拟退火法[34−36] 分布式 计算简单、鲁棒性高 对初始值和参数过于敏感 异构任务分配 群体智能算法[37−40] 分布式 加快收敛速度、快速找到近似最优解 非常大的解空间时无法保证最优性 提高空间覆盖率 基于市场的方法[41−44] 分布式 高鲁棒性、可扩展性和灵活性 成本函数缺乏形式化、设计复杂化 飞机装配任务 基于学习的方法[46−48] 集中式 高适应性、鲁棒性 奖励函数设计困难、采样效率低 未知环境分配 线性规划+市场法[16] 集中/分布 高严谨性、提高速度 成本函数设计复杂 汽车制造 市场法+启发式[51] 分布式 高鲁棒性、快速性 无法保证全局最优 焊接制造 启发式+机器学习[53] 集中/分布 快速性、高适应性 奖励函数设计复杂 工具切换  下载: 导出CSV
下载: 导出CSV
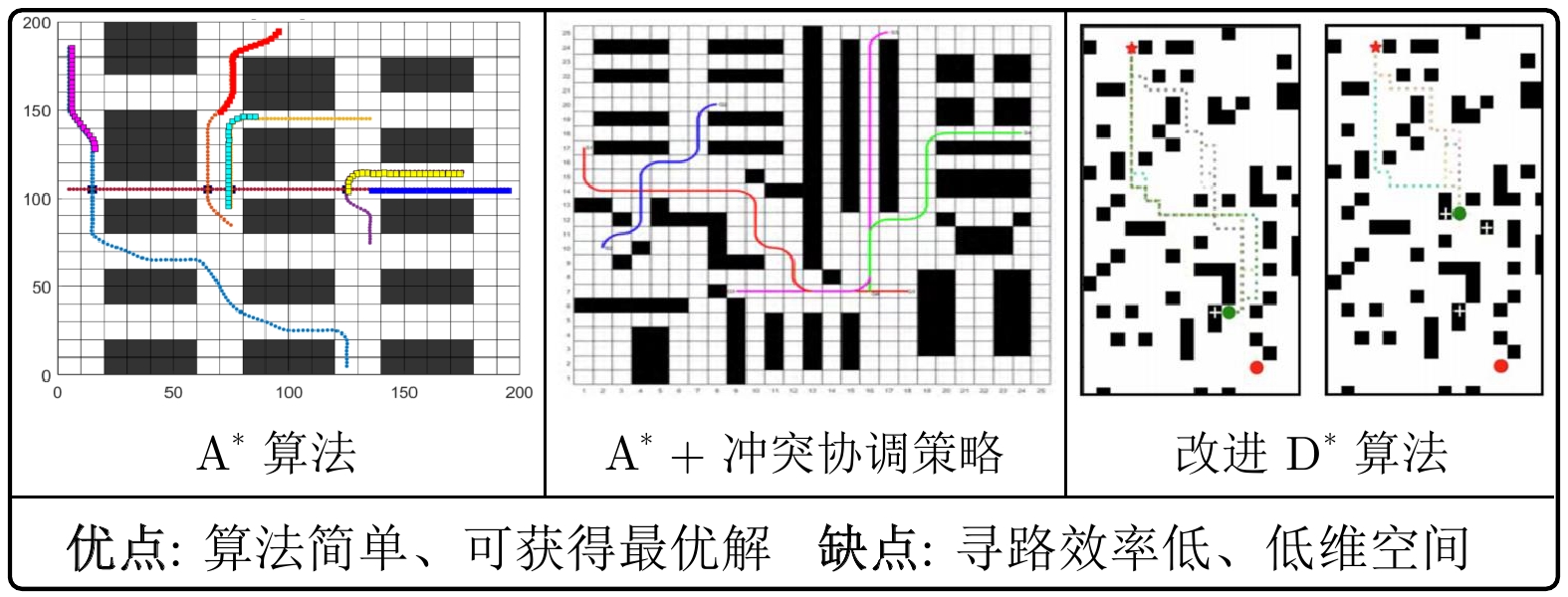
表 2 运动规划方法分析
Table 2 The analysis of motion planning
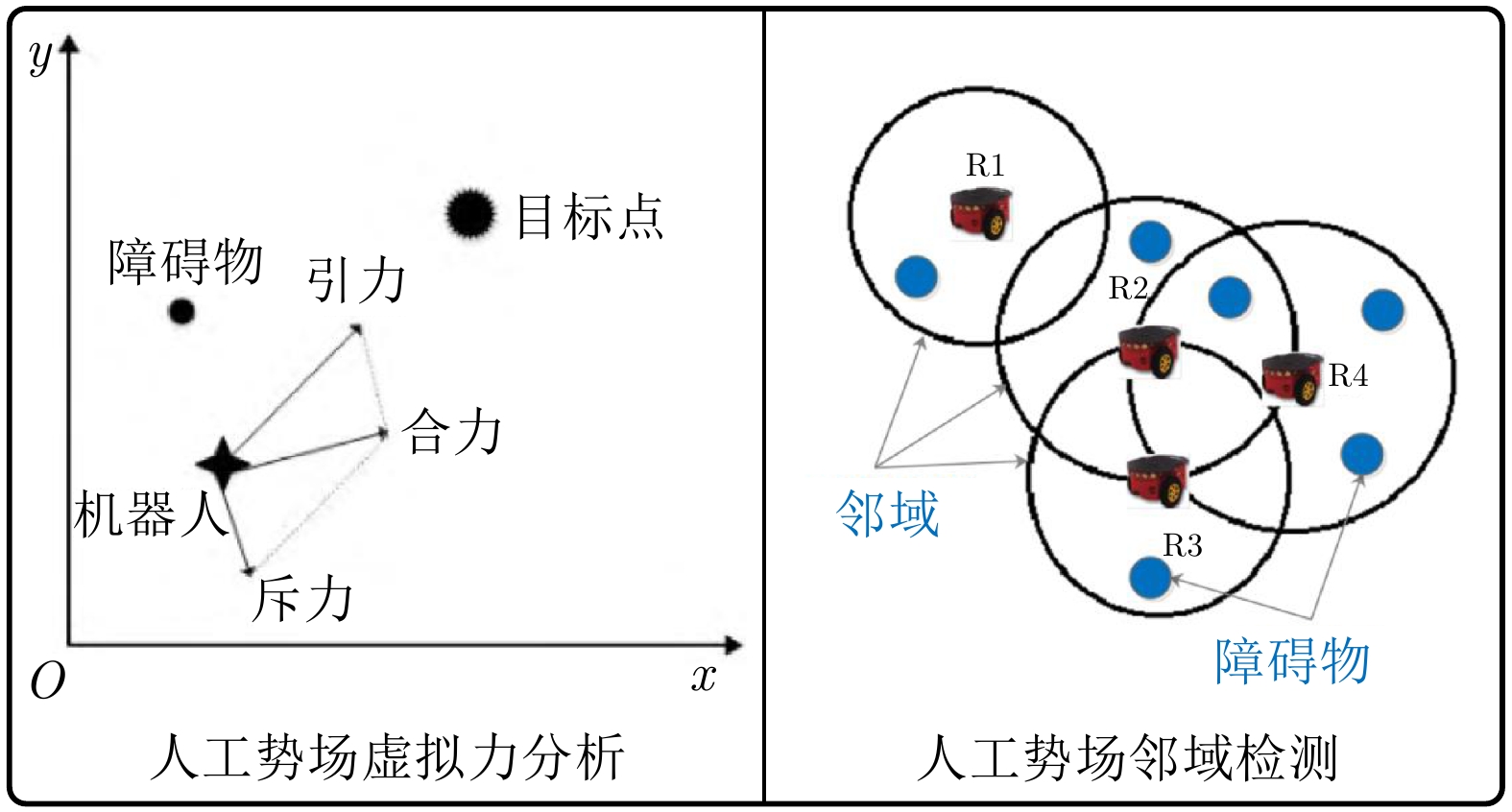
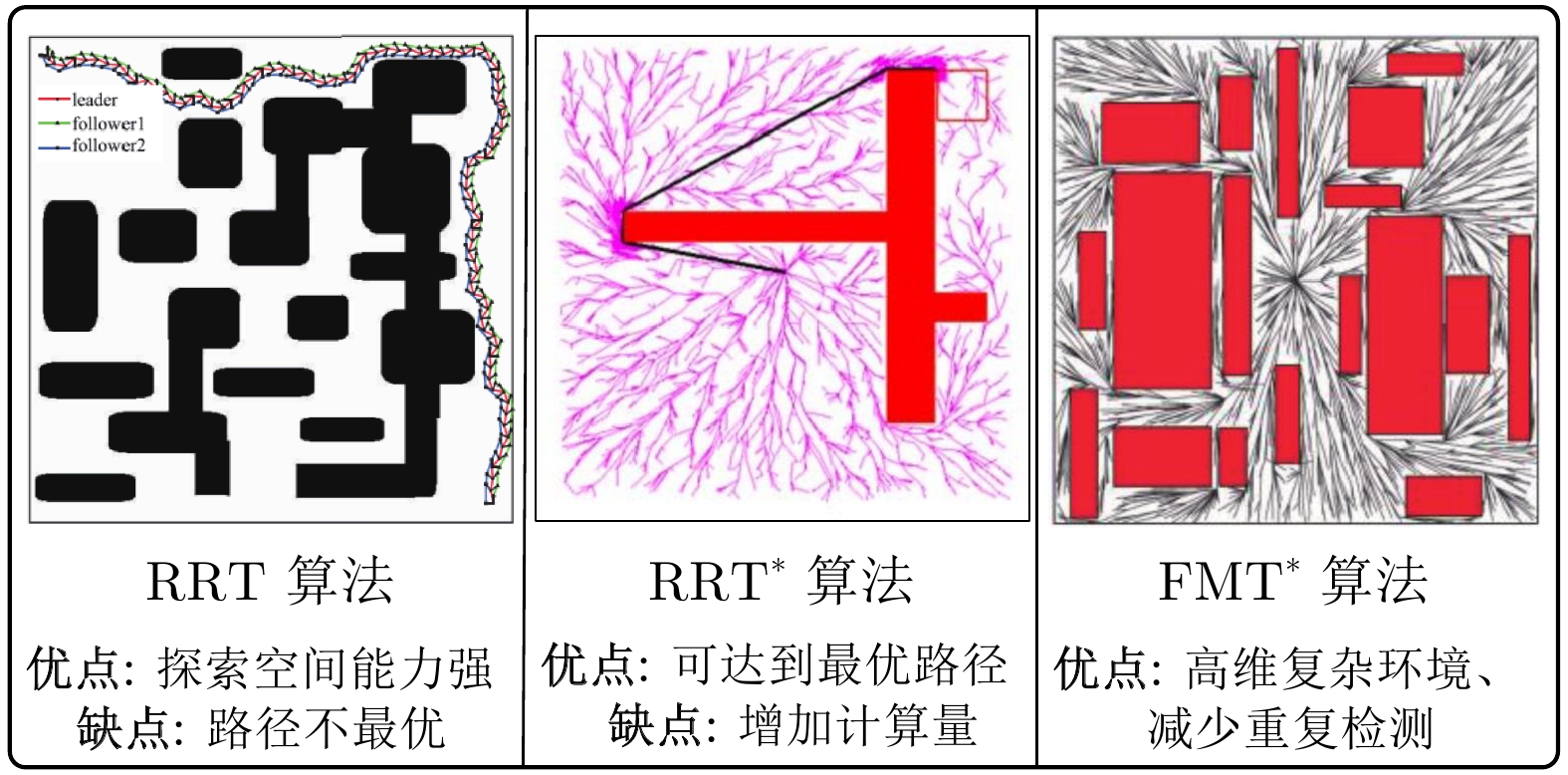
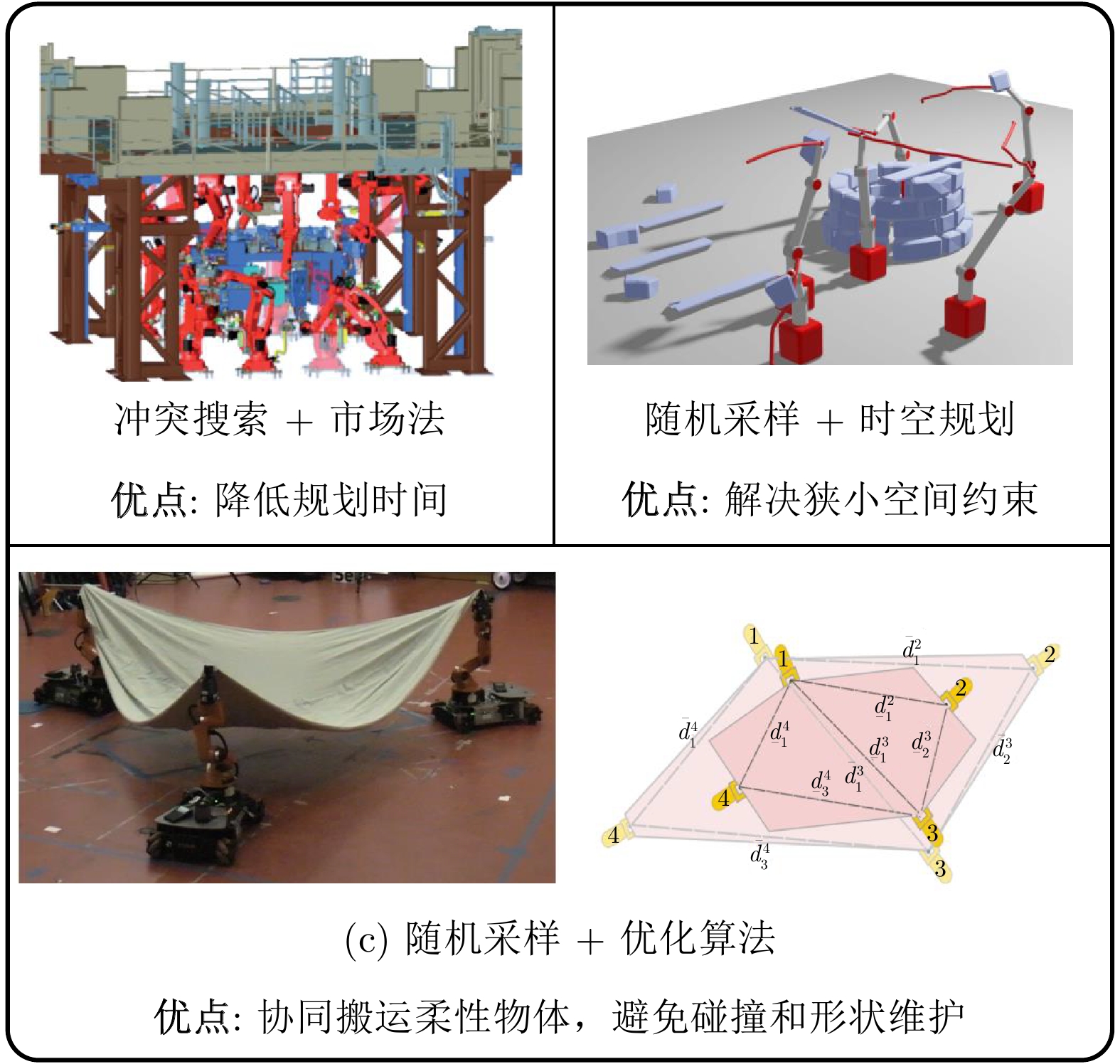
使用方法 全局/局部 优点 缺点 应用 广度优先搜索[71] 全局 可以获得问题的最优解 浪费大量的时间探索无用区域 游戏领域 A* 算法[73, 78−79] 全局 减少节点, 可获得最优解 仅针对环境已知的静态场景 协同避障 D* 算法[74, 80] 全局 可适应环境信息的变化 寻路效率低、仅适用于低维空间 动态环境 CBS算法[81−83] 全局 提高搜索速度, 保持最优 依赖地图网格的划分 冲突预测 人工势场法[84−91] 局部 高鲁棒性、目标路径安全平稳 容易陷入局部最优仅适用于二维平面 协同避障 RRT算法[95−96] 局部 位置环境探索能力强 规划路径可能非最优解 编队规划 RRT* 算法[98−101] 局部 可以达到最优路径 增加碰撞检测计算节点 动态环境避障 FMT* 算法[102] 局部 适用于高位复杂环境 容易产生冗余扩展导致性能较低 高维复杂环境 群体智能算法[107−114] 全局 可扩展性、灵活性 高随机性、可能不收敛 未知环境搜索 人工神经网络[115−120] 全局 高适应性、可达到全局最优 奖励函数设计困难、计算效率低 复杂未知环境 冲突搜索 + 市场法[122] 全局/局部 减少计算时间、设计失误 成本函数设计复杂 多机点焊 分布式梯度 + 群体智能[128] 全局/局部 高灵活性、最优性 寻路效率低 自主装配
下载: 导出CSV
-
[1] Zhou J, Li P G, Zhou Y H, Wang B C, Zang J Y, Meng L. Toward new-generation intelligent manufacturing. Engineering, 2018, 4(1): 11-20 doi: 10.1016/j.eng.2018.01.002 [2] 谢福贵, 梅斌, 刘辛军, 张加波, 乐毅. 一种大型复杂构件加工新模式及新装备探讨. 机械工程学报, 2020, 56(19): 70-78 doi: 10.3901/JME.2020.19.070Xie Fu-Gui, Mei Bin, Liu Xin-Jun, Zhang Jia-Bo, Yue Yi. Novel mode and equipment for machining large complex components. Journal of Mechanical Engineering, 2020, 56(19): 70-78 doi: 10.3901/JME.2020.19.070 [3] 王婧, 张弓, 郑甲红, 吴月玉, 侯至丞, 杨文林, 等. 多机器人优化布局与任务分配的研究综述与展望. 机床与液压, 2021, 49(16): 161-167Wang Jing, Zhang Gong, Zheng Jia-Hong, Wu Yue-Yu, Hou Zhi-Cheng, Yang Wen-Lin, et al. Survey and expectation of multi-robot optimization layout and task allocation. Machine Tool & Hydraulics, 2021, 49(16): 161-167 [4] Rubenstein M, Cornejo A, Nagpal R. Programmable self-assembly in a thousand-robot swarm. Science, 2014, 345(6198): 795-799 doi: 10.1126/science.1254295 [5] Li S G, Batra R, Brown D, Chang H D, Ranganathan N, Hoberman C, et al. Particle robotics based on statistical mechanics of loosely coupled components. Nature, 2019, 567(7748): 361-365 doi: 10.1038/s41586-019-1022-9 [6] Jaderberg M, Czarnecki W M, Dunning I, Marris L, Lever G, Castaneda A G, et al. Human-level performance in 3D multiplayer games with population-based reinforcement learning. Science, 2019, 364(6443): 859-865 doi: 10.1126/science.aau6249 [7] Skaltsis G M, Shin H S, Tsourdos A. A survey of task allocation techniques in MAS. In: Proceedings of International Conference on Unmanned Aircraft Systems (ICUAS). Athens, Greece: IEEE, 2021. 488−497 [8] Zhang K T, Chermprayong P, Xiao F, Tzoumanikas D, Dams B, Kay S, et al. Aerial additive manufacturing with multiple autonomous robots. Nature, 2022, 609(7928): 709-717 doi: 10.1038/s41586-022-04988-4 [9] Foehn P, Romero A, Scaramuzza D. Time-optimal planning for quadrotor waypoint flight. Science Robotics, 2021, 6(56): Article No. eabh1221 doi: 10.1126/scirobotics.abh1221 [10] Ali A, Azevedo-Sa H, Tilbury D M, Robert Jr L P. Heterogeneous human–robot task allocation based on artificial trust. Scientific Reports, 2022, 12(1): Article No. 15304 doi: 10.1038/s41598-022-19140-5 [11] Suárez-Ruiz F, Zhou X, Pham Q C. Can robots assemble an IKEA chair? Science Robotics, 2018, 3(17): Article No. eaat6385 [12] Li X, Serlin Z, Yang G, Belta C. A formal methods approach to interpretable reinforcement learning for robotic planning. Science Robotics, 2019, 4(37): Article No. eaay6276 doi: 10.1126/scirobotics.aay6276 [13] 唐苏妍, 朱一凡, 李群, 雷永林. 多Agent系统任务分配方法综述. 系统工程与电子技术, 2010, 32(10): 2155-2161 doi: 10.3969/j.issn.1001-506X.2010.10.30Tang Su-Yan, Zhu Yi-Fan, Li Qun, Lei Yong-Lin. Survey of task allocation in multi agent systems. Systems Engineering and Electronics, 2010, 32(10): 2155-2161 doi: 10.3969/j.issn.1001-506X.2010.10.30 [14] 张嵛, 刘淑华. 多机器人任务分配的研究与进展. 智能系统学报, 2008, 3(2): 115-120Zhang Yu, Liu Shu-Hua. Survey of multi-robot task allocation. CAAI Transactions on Intelligent Systems, 2008, 3(2): 115-120 [15] Turner J, Meng Q G, Schaefer G, Whitbrook A, Soltoggio A. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Transactions on Cybernetics, 2018, 48(9): 2583-2597 doi: 10.1109/TCYB.2017.2743164 [16] Spensieri D, Carlson J S, Ekstedt F, Bohlin R. An iterative approach for collision free routing and scheduling in multirobot stations. IEEE Transactions on Automation Science and Engineering, 2016, 13(2): 950-962 doi: 10.1109/TASE.2015.2432746 [17] Hu X X, Ma H W, Ye Q S, Luo H. Hierarchical method of task assignment for multiple cooperating UAV teams. Journal of Systems Engineering and Electronics, 2015, 26(5): 1000-1009 doi: 10.1109/JSEE.2015.00109 [18] Mai L, Dao N N, Park M. Real-time task assignment approach leveraging reinforcement learning with evolution strategies for long-term latency minimization in fog computing. Sensors, 2018, 18(9): Article No. 2830 doi: 10.3390/s18092830 [19] Wu H S, Li H, Xiao R B, Liu J. Modeling and simulation of dynamic ant colony's labor division for task allocation of UAV swarm. Physica A: Statistical Mechanics and its Applications, 2018, 491: 127-141 doi: 10.1016/j.physa.2017.08.094 [20] Whitbrook A, Meng Q G, Chung P W H. Reliable, distributed scheduling and rescheduling for time-critical, multiagent systems. IEEE Transactions on Automation Science and Engineering, 2018, 15(2): 732-747 doi: 10.1109/TASE.2017.2679278 [21] Pujol-Gonzalez M, Cerquides J, Farinelli A, Meseguer P, Rodriguez-Aguilar J A. Efficient inter-team task allocation in RoboCup rescue. In: Proceedings of International Conference on Autonomous Agents and Multiagent Systems. Istanbul, Turkey: ACM, 2015. 413−421 [22] Mayya S, Wilson S, Egerstedt M. Closed-loop task allocation in robot swarms using inter-robot encounters. Swarm Intelligence, 2019, 13(2): 115-143 doi: 10.1007/s11721-019-00166-x [23] Tereshchuk V, Stewart J, Bykov N, Pedigo S, Devasia S, Banerjee A G. An efficient scheduling algorithm for multi-robot task allocation in assembling aircraft structures. IEEE Robotics and Automation Letters, 2019, 4(4): 3844-3851 doi: 10.1109/LRA.2019.2929983 [24] Oh G, Kim Y, Ahn J, Choi H L. Market-based task assignment for cooperative timing missions in dynamic environments. Journal of Intelligent & Robotic Systems, 2017, 87(1): 97-123 [25] Horst R, Pardalos P M, Van Thoai N. Introduction to Global Optimization. (Second edition). New York: Springer, 2000. [26] Schneider J J, Kirkpatrick S. Stochastic Optimization. Berlin: Springer, 2007. [27] Floudas C A, Lin X X. Mixed integer linear programming in process scheduling: Modeling, algorithms, and applications. Annals of Operations Research, 2005, 139(1): 131-162 doi: 10.1007/s10479-005-3446-x [28] Reklaitis G V. Overview of scheduling and planning of batch process operations. Batch Processing Systems Engineering. Berlin: Springer, 1996. 660−705 [29] Bererton C A, Gordon G, Khosla P. Multi-robot Coordination and Competition Using Mixed Integer and Linear Programs. Schenley Park Pittsburgh: Carnegie Mellon University, 2004. [30] Schumacher C, Chandler P, Pachter M, Pachter L. UAV task assignment with timing constraints via mixed-integer linear programming. In: Proceedings of the AIAA 3rd “Unmanned Unlimited” Technical Conference, Workshop and Exhibit. Chicago, USA: AIAA, 2004. 6410 [31] 聂明泓, 杨丽英, 聂义勇. 任务分配问题的建模与求解. 小型微型计算机系统, 2009, 30(4): 710-715Nie Ming-Hong, Yang Li-Ying, Nie Yi-Yong. Modelling and solution for assignment problem. Journal of Chinese Computer Systems, 2009, 30(4): 710-715 [32] Åblad E, Spensieri D, Bohlin R, Carlson J S, Strömberg A B. Spatial-temporal load balancing and coordination of multi-robot stations. IEEE Transactions on Automation Science and Engineering, 2023, 20(4): 2203−2214 [33] An S, Kim H J. Simultaneous task assignment and path planning using mixed-integer linear programming and potential field method. In: Proceedings of the 13th International Conference on Control, Automation and Systems (ICCAS 2013). Gwangju, South Korea: IEEE, 2013. 1845−1848 [34] Kirkpatrick S, Gelatt Jr C D, Vecchi M P. Optimization by simulated annealing. Science, 1983, 220(4598): 671-680 doi: 10.1126/science.220.4598.671 [35] Wang Y, Shi Y, Liu Y. Research on improved genetic simulated annealing algorithm for multi-UAV cooperative task allocation. In: Proceedings of Journal of Physics: Conference Series. IOP, 2022, 2246(1): 012081 [36] Attiya G, Hamam Y. Task allocation for maximizing reliability of distributed systems: A simulated annealing approach. Journal of parallel and Distributed Computing, 2006, 66(10): 1259-1266 doi: 10.1016/j.jpdc.2006.06.006 [37] Sasaki T, Biro D. Cumulative culture can emerge from collective intelligence in animal groups. Nature Communications, 2017, 8: Article No. 15049 doi: 10.1038/ncomms15049 [38] Li Z, Barenji A V, Jiang J Z, Zhong R Y, Xu G Y. A mechanism for scheduling multi robot intelligent warehouse system face with dynamic demand. Journal of Intelligent Manufacturing, 2020, 31(2): 469-480 doi: 10.1007/s10845-018-1459-y [39] Panerati J, Gianoli L, Pinciroli C, Shabah A, Nicolescu G, Beltrame G. From swarms to stars: Task coverage in robot swarms with connectivity constraints. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA). Brisbane, Australia: IEEE, 2018. 7674−7681 [40] Geetha K, Ravindran D, Kumar M S, Islam M N. Concurrent tolerance allocation and scheduling for complex assemblies. Robotics and Computer-Integrated Manufacturing, 2015, 35: 84-95 doi: 10.1016/j.rcim.2015.03.001 [41] Luo L Z, Chakraborty N, Sycara K. Distributed algorithms for multirobot task assignment with task deadline constraints. IEEE Transactions on Automation Science and Engineering, 2015, 12(3): 876-888 doi: 10.1109/TASE.2015.2438032 [42] Choi H L, Brunet L, How J P. Consensus-based decentralized auctions for robust task allocation. IEEE Transactions on Robotics, 2009, 25(4): 912-926 doi: 10.1109/TRO.2009.2022423 [43] Wu D F, Zeng G P, Meng L G, Zhou W J, Li L M. Gini coefficient-based task allocation for multi-robot systems with limited energy resources. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 155-168 doi: 10.1109/JAS.2017.7510385 [44] Chen X C, He S W, Zhang Y X, Tong L, Shang P, Zhou X S. Yard crane and AGV scheduling in automated container terminal: A multi-robot task allocation framework. Transportation Research Part C: Emerging Technologies, 2020, 114: 241-271 doi: 10.1016/j.trc.2020.02.012 [45] Tian Y T, Yang M, Qi X Y, Yang Y M. Multi-robot task allocation for fire-disaster response based on reinforcement learning. In: Proceedings of International Conference on Machine Learning and Cybernetics. Baoding, China: IEEE, 2009. 2312−2317 [46] Wilson A, Fern A, Ray S, Tadepalli P. Multi-task reinforcement learning: A hierarchical Bayesian approach. In: Proceedings of the 24th International Conference on Machine Learning. Corvalis, USA: ACM, 2007. 1015−1022 [47] Sun L J, Yu X J, Guo J C, Yan Y, Yu X. Deep reinforcement learning for task assignment in spatial crowdsourcing and sensing. IEEE Sensors Journal, 2021, 21(22): 25323-25330 doi: 10.1109/JSEN.2021.3057376 [48] Wang Z Y, Gombolay M. Learning scheduling policies for multi-robot coordination with graph attention networks. IEEE Robotics and Automation Letters, 2020, 5(3): 4509-4516 doi: 10.1109/LRA.2020.3002198 [49] Choudhury S, Gupta J K, Kochenderfer M J, Sadigh D, Bohg J. Dynamic multi-robot task allocation under uncertainty and temporal constraints. Autonomous Robots, 2022, 46(1): 231-247 doi: 10.1007/s10514-021-10022-9 [50] Zhou B, Zhou R, Gan Y H, Fang F, Mao Y J. Multi-robot multi-station cooperative spot welding task allocation based on stepwise optimization: An industrial case study. Robotics and Computer-Integrated Manufacturing, 2022, 73: Article No. 102197 doi: 10.1016/j.rcim.2021.102197 [51] Tereshchuk V, Bykov N, Pedigo S, Devasia S, Banerjee A G. A scheduling method for multi-robot assembly of aircraft structures with soft task precedence constraints. Robotics and Computer-Integrated Manufacturing, 2021, 71: Article No. 102154 doi: 10.1016/j.rcim.2021.102154 [52] Liu S R, Shen J X, Tian W, Lin J M, Li P C, Li B. Balanced task allocation and collision-free scheduling of multi-robot systems in large spacecraft structure manufacturing. Robotics and Autonomous Systems, 2023, 159: Article No. 104289 doi: 10.1016/j.robot.2022.104289 [53] Paiva G S, Carvalho M A M. Improved heuristic algorithms for the job sequencing and tool switching problem. Computers & Operations Research, 2017, 88: 208-219 [54] Fung N, Rogers J, Nieto C, Christensen H I, Kemna S, Sukhatme G. Coordinating multi-robot systems through environment partitioning for adaptive informative sampling. In: Proceedings of International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 3231−3237 [55] Shi Y F, Wang N, Zheng J M, Zhang Y, Yi S, Luo W H, et al. Adaptive informative sampling with environment partitioning for heterogeneous multi-robot systems. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 11718−11723 [56] Lopes T C, Sikora C G S, Molina R G, Schibelbain D, Rodrigues L C A, Magatão L. Balancing a robotic spot welding manufacturing line: An industrial case study. European Journal of Operational Research, 2017, 263(3): 1033-1048 doi: 10.1016/j.ejor.2017.06.001 [57] Mitiche H, Boughaci D, Gini M. Efficient heuristics for a time-extended multi-robot task allocation problem. In: Proceedings of International Conference on New Technologies of Information and Communication (NTIC). Mila, Algeria: IEEE, 2015. 1−6 [58] Ham A, Park M J. Human–robot task allocation and scheduling: Boeing 777 case study. IEEE Robotics and Automation Letters, 2021, 6(2): 1256-1263 doi: 10.1109/LRA.2021.3056069 [59] Huang J, Yang B, Liu D Y. A distributed Q-learning algorithm for multi-agent team coordination. In: Proceedings of International Conference on Machine Learning and Cybernetics. Guangzhou, China: IEEE, 2005. 108−113 [60] Gil P, Nunes L. Hierarchical reinforcement learning using path clustering. In: Proceedings of the 8th Iberian Conference on Information Systems and Technologies (CISTI). Lisboa, Portugal: IEEE, 2013. 1−6 [61] Yu X Y, Gao X H, Wang L, Wang X W, Ding Y, Lu C, et al. Cooperative multi-UAV task assignment in cross-regional joint operations considering ammunition inventory. Drones, 2022, 6(3): Article No. 77 doi: 10.3390/drones6030077 [62] Zhang Q, Wang Y J, Cai Z P, Tong X R. Multi-stage online task assignment driven by offline data under spatio-temporal crowdsourcing. Digital Communications and Networks, 2022, 8(4): 516-530 doi: 10.1016/j.dcan.2021.10.005 [63] McGuire K N, De Wagter C, Tuyls K, Kappen H J, De Croon G C H E. Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment. Science Robotics, 2019, 4(35): Article No. eaaw9710 doi: 10.1126/scirobotics.aaw9710 [64] 原魁, 李园, 房立新. 多移动机器人系统研究发展近况. 自动化学报, 2007, 33(8): 785-794Yuan Kui, Li Yuan, Fang Li-Xin. Multiple mobile robot systems: A survey of recent work. Acta Automatica Sinica, 2007, 33(8): 785-794 [65] 李黎, 尚俊云, 冯艳丽, 淮亚文. 关节型工业机器人轨迹规划研究综述. 计算机工程与应用, 2018, 54(5): 36-50Li Li, Shang Jun-Yun, Feng Yan-Li, Huai Ya-Wen. Research of trajectory planning for articulated industrial robot: A review. Computer Engineering and Applications, 2018, 54(5): 36-50 [66] Yilmaz N K, Evangelinos C, Lermusiaux P F J, Patrikalakis N M. Path planning of autonomous underwater vehicles for adaptive sampling using mixed integer linear programming. IEEE Journal of Oceanic Engineering, 2008, 33(4): 522-537 doi: 10.1109/JOE.2008.2002105 [67] Aghababa M P. 3D path planning for underwater vehicles using five evolutionary optimization algorithms avoiding static and energetic obstacles. Applied Ocean Research, 2012, 38: 48-62 doi: 10.1016/j.apor.2012.06.002 [68] Yue R G, Xiao J Z, Wang S P, Joseph S L. Modeling and path planning of the city-climber robot part II: 3D path planning using mixed integer linear programming. In: Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). Guilin, China: IEEE, 2009. 2391−2396 [69] Yan F, Liu Y S, Xiao J Z. Path planning in complex 3D environments using a probabilistic roadmap method. International Journal of Automation and Computing, 2013, 10(6): 525-533 doi: 10.1007/s11633-013-0750-9 [70] Duan H B, Yu Y X, Zhang X Y, Shao S. Three-dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm. Simulation Modelling Practice and Theory, 2010, 18(8): 1104-1115 doi: 10.1016/j.simpat.2009.10.006 [71] Awerbuch B, Gallager R. A new distributed algorithm to find breadth first search trees. IEEE Transactions on Information Theory, 1987, 33(3): 315-322 doi: 10.1109/TIT.1987.1057314 [72] Ng F, Butler G, Kay J. An intelligent tutoring system for the Dijkstra-Gries methodology. IEEE Transactions on Software Engineering, 1995, 21(5): 415-428 doi: 10.1109/32.387471 [73] Hart P E, Nilsson N J, Raphael B. A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107 doi: 10.1109/TSSC.1968.300136 [74] Stentz A. Optimal and efficient path planning for partially-known environments. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA). San Diego, USA: IEEE, 1994. 3310−3317. [75] Koenig S, Likhachev M, Furcy D. Lifelong planning A*. Artificial Intelligence, 2004, 155(1-2): 93-146 doi: 10.1016/j.artint.2003.12.001 [76] Koenig S, Likhachev M. D* lite. In: Proceedings of the 18th National Conference on Artificial Intelligence. Edmonton Alberta, Canada: ACM, 2002. 476−483 [77] Ferguson D, Stentz A. The Field D* Algorithm for Improved Path Planning and Replanning in Uniform and Non-uniform Cost Environments, Technical Report CMU-TR-RI-05-19, Carnegie Mellon University, Pittsburgh, USA, 2005. [78] Ali H, Xiong G, Wu H Y, Hu B, Shen Z, Bai H X. Multi-robot path planning and trajectory smoothing. In: Proceedings of the IEEE 16th International Conference on Automation Science and Engineering (CASE). Hong Kong, China: IEEE, 2020. 685−690 [79] 陈光友, 余粟. 改进A* 的多机器人双层路径规划算法. 计算机工程与应用, 2023, 59(11): 312−319Chen Guang-You, Yu Su. Improved A* multi robot bilevel path planning algorithm. Computer Engineering and Applications, 2023, 59(11): 312−319 [80] Ren Z Q, Rathinam S, Likhachev M, Choset H. Multi-objective path-based D* lite. IEEE Robotics and Automation Letters, 2022, 7(2): 3318-3325 doi: 10.1109/LRA.2022.3146918 [81] Sharon G, Stern R, Felner A, Sturtevant N R. Conflict-based search for optimal multi-agent pathfinding. Artificial Intelligence, 2015, 219: 40-66 doi: 10.1016/j.artint.2014.11.006 [82] Zhang X B, Wang J R, Fang Y C, Yuan J. Multilevel humanlike motion planning for mobile robots in complex indoor environments. IEEE Transactions on Automation Science and Engineering, 2019, 16(3): 1244-1258 doi: 10.1109/TASE.2018.2880245 [83] Dogar M, Spielberg A, Baker S, Rus D. Multi-robot grasp planning for sequential assembly operations. Autonomous Robots, 2019, 43(3): 649-664 doi: 10.1007/s10514-018-9748-z [84] Liu C Q, Ang M H, Krishnan H, Yong L S. Virtual obstacle concept for local-minimum-recovery in potential-field based navigation. In: Proceedings of ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065). San Francisco, USA: IEEE, 2000. 983−988 [85] 石鸿雁, 孙昌志. 一种基于混沌优化算法的机器人路径规划方法. 机器人, 2005, 27(2): 152-157Shi Hong-Yan, Sun Chang-Zhi. Path planning method for robot based on chaotic optimization algorithm. Robot, 2005, 27(2): 152-157 [86] Scott N A, Carignan C R. A line-based obstacle avoidance technique for dexterous manipulator operations. In: Proceedings of IEEE International Conference on Robotics and Automation. Pasadena, USA: IEEE, 2008. 3353−3358 [87] Lee D, Jeong J, Kim Y H, Park J B. An improved artificial potential field method with a new point of attractive force for a mobile robot. In: Proceedings of the 2nd International Conference on Robotics and Automation Engineering (ICRAE). Shanghai, China: IEEE, 2017. 63−67 [88] 韩伟, 孙凯彪. 基于模糊人工势场法的智能全向车路径规划. 计算机工程与应用, 2018, 54(6): 105-109, 167Han Wei, Sun Kai-Biao. Research on dynamic path planning of fuzzy artificial potential field method. Computer Engineering and Applications, 2018, 54(6): 105-109, 167 [89] Mamani K M S, Ordoñez J. MIMC-VADOC model for autonomous multi-robot formation control applied to differential robots. In: Proceedings of the 8th International Conference on Automation, Robotics and Applications (ICARA). Prague, Czech Republic: IEEE, 2022. 118−124 [90] Pan Z, Zhang C, Xia Y, Xiong H, Shao X. An improved artificial potential field method for path planning and formation control of the multi-UAV systems. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 69(3): 1129−1133 [91] Matoui F, Boussaid B, Abdelkrim M N. Distributed path planning of a multi-robot system based on the neighborhood artificial potential field approach. Simulation, 2019, 95(7): 637-657 doi: 10.1177/0037549718785440 [92] Wu Z C, Su W Z, Li J H. Multi-robot path planning based on improved artificial potential field and B-spline curve optimization. In: Proceedings of Chinese Control Conference (CCC). Guangzhou, China: IEEE, 2019. 4691−4696 [93] Ge J X, Sun F C, Liu C F. RRT-GD: An efficient rapidly-exploring random tree approach with goal directionality for redundant manipulator path planning. In: Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). Qingdao, China: IEEE, 2016. 1983−1988 [94] Kavraki L E, Svestka P, Latombe J C, Overmars M H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Transactions on Robotics and Automation, 1996, 12(4): 566-580 doi: 10.1109/70.508439 [95] LaValle S M, Kuffner Jr J J. Randomized kinodynamic planning. The International Journal of Robotics Research, 2001, 20(5): 378-400 doi: 10.1177/02783640122067453 [96] 王乐乐, 眭泽智, 蒲志强, 刘振, 易建强. 一种改进RRT的多机器人编队路径规划算法. 电子学报, 2020, 48(11): 2138-2145Wang Le-Le, Sui Ze-Zhi, Pu Zhi-Qiang, Liu Zhen, Yi Jian-Qiang. An improved RRT algorithm for multi-robot formation path planning. Acta Electonica Sinica, 2020, 48(11): 2138-2145 [97] 陈锦涛, 李鸿一, 任鸿儒, 鲁仁全. 基于RRT森林算法的高层消防无人机室内协同路径规划. 自动化学报, 2023, 49(12): 2615−2626Chen Jin-Tao, Li Hong-Yi, Ren Hong-Ru, Lu Ren-Quan. Cooperative indoor path planning of multi-UAVs for high-rise fire fighting based on RRT-forest algorithm. Acta Automatica Sinica, 2023, 49(12): 2615−2626 [98] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30(7): 846-894 doi: 10.1177/0278364911406761 [99] Cui R X, Li Y, Yan W S. Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT*. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2016, 46(7): 993-1004 doi: 10.1109/TSMC.2015.2500027 [100] LaValle S M. Planning Algorithms. Cambridge: Cambridge University Press, 2006. [101] 杜明博, 梅涛, 陈佳佳, 赵盼, 梁华为, 黄如林, 等. 复杂环境下基于RRT的智能车辆运动规划算法. 机器人, 2015, 37(4): 443-450Du Ming-Bo, Mei Tao, Chen Jia-Jia, Zhao Pan, Liang Hua-Wei, Huang Ru-Lin, et al. RRT-based motion planning algorithm for intelligent vehicle in complex environments. Robot, 2015, 37(4): 443-450 [102] Janson L, Schmerling E, Clark A, Pavone M. Fast marching tree: A fast marching sampling-based method for optimal motion planning in many dimensions. The International Journal of Robotics Research, 2015, 34(7): 883-921 doi: 10.1177/0278364915577958 [103] Le D, Plaku E. Multi-robot motion planning with dynamics via coordinated sampling-based expansion guided by multi-agent search. IEEE Robotics and Automation Letters, 2019, 4(2): 1868-1875 doi: 10.1109/LRA.2019.2898087 [104] Dayan D, Solovey K, Pavone M, Halperin D. Near-optimal multi-robot motion planning with finite sampling. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China: IEEE, 2021. 9190−9196 [105] Das N, Yip M. Learning-based proxy collision detection for robot motion planning applications. IEEE Transactions on Robotics, 2020, 36(4): 1096-1114 doi: 10.1109/TRO.2020.2974094 [106] Josef S, Degani A. Deep reinforcement learning for safe local planning of a ground vehicle in unknown rough terrain. IEEE Robotics and Automation Letters, 2020, 5(4): 6748-6755 doi: 10.1109/LRA.2020.3011912 [107] Bhaduri A. A mobile robot path planning using genetic artificial immune network algorithm. In: Proceedings of World Congress on Nature & Biologically Inspired Computing (NaBIC). Coimbatore, India: IEEE, 2009. 1536−1539 [108] Nazarahari M, Khanmirza E, Doostie S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Systems With Applications, 2019, 115: 106-120 doi: 10.1016/j.eswa.2018.08.008 [109] Dorigo M, Gambardella L M, Middendorf M, Stutzle T. Guest editorial: Special section on ant colony optimization. IEEE Transactions on Evolutionary Computation, 2002, 6(4): 317-319 doi: 10.1109/TEVC.2002.802446 [110] 江明, 王飞, 葛愿, 孙龙龙. 基于改进蚁群算法的移动机器人路径规划研究. 仪器仪表学报, 2019, 40(2): 113-121Jiang Ming, Wang Fei, Ge Yuan, Sun Long-Long. Research on path planning of mobile robot based on improved ant colony algorithm. Chinese Journal of Scientific Instrument, 2019, 40(2): 113-121 [111] Hasan A H, Mosa A M. Multi-robot path planning based on max-min ant colony optimization and D* algorithms in a dynamic environment. In: Proceedings of International Conference on Advanced Science and Engineering (ICOASE). Duhok, Iraq: IEEE, 2018. 110−115 [112] Kennedy J, Eberhart R. Particle swarm optimization. In: Proceedings of International Conference on Neural Networks. Perth, Australia: IEEE, 1995. 1942−1948 [113] Wang J W, Ren X M, Liu J. Trajectory planning for multi-robot formation by one hybrid particle swarm optimization algorithm. In: Proceedings of 5th International Conference on Intelligent Human-Machine Systems and Cybernetics. Hangzhou, China: IEEE, 2013. 344−348 [114] Dadgar M, Jafari S, Hamzeh A. A PSO-based multi-robot cooperation method for target searching in unknown environments. Neurocomputing, 2016, 177: 62-74 doi: 10.1016/j.neucom.2015.11.007 [115] Li Y, Cui R X, Li Z J, Xu D M. Neural network approximation based near-optimal motion planning with kinodynamic constraints using RRT. IEEE Transactions on Industrial Electronics, 2018, 65(11): 8718-8729 doi: 10.1109/TIE.2018.2816000 [116] Sebastian B, Ren H L, Ben-Tzvi P. Neural network based heterogeneous sensor fusion for robot motion planning. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau, China: IEEE, 2019. 2899−2904 [117] Pfeiffer M, Schaeuble M, Nieto J, Siegwart R, Cadena C. From perception to decision: A data-driven approach to end-to-end motion planning for autonomous ground robots. In: Proceedings of IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017. 1527−1533 [118] He C Y, Wan Y, Gu Y X, Lewis F L. Integral reinforcement learning-based multi-robot minimum time-energy path planning subject to collision avoidance and unknown environmental disturbances. IEEE Control Systems Letters, 2021, 5(3): 983-988 doi: 10.1109/LCSYS.2020.3007663 [119] Tai L, Paolo G, Liu M. Virtual-to-real deep reinforcement learning: Continuous control of mobile robots for mapless navigation. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, Canada: IEEE, 2017. 31−36 [120] Bae H, Kim G, Kim J, Qian D W, Lee S. Multi-robot path planning method using reinforcement learning. Applied Sciences, 2019, 9(15): Article No. 3057 doi: 10.3390/app9153057 [121] Veeramani S, Muthuswamy S, Setchi R. Coordination and path planning of a heterogeneous multi-robot system for sheet metal drilling. Procedia Computer Science, 2022, 207: 2335-2344 doi: 10.1016/j.procs.2022.09.292 [122] Pellegrinelli S, Pedrocchi N, Tosatti L M, Fischer A, Tolio T. Multi-robot spot-welding cells for car-body assembly: Design and motion planning. Robotics and Computer-Integrated Manufacturing, 2017, 44: 97-116 doi: 10.1016/j.rcim.2016.08.006 [123] Hartmann V N, Orthey A, Driess D, Oguz O S, Toussaint M. Long-horizon multi-robot rearrangement planning for construction assembly. IEEE Transactions on Robotics, 2023, 39(1): 239-252 doi: 10.1109/TRO.2022.3198020 [124] Alonso-Mora J, Knepper R, Siegwart R, Rus D. Local motion planning for collaborative multi-robot manipulation of deformable objects. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA). Seattle, USA: IEEE, 2015. 5495−5502 [125] Touzani H, Hadj-Abdelkader H, Séguy N, Bouchafa S. Multi-robot task sequencing & automatic path planning for cycle time optimization: Application for car production line. IEEE Robotics and Automation Letters, 2021, 6(2): 1335-1342 doi: 10.1109/LRA.2021.3057011 [126] Han S D, Yu J J. Effective heuristics for multi-robot path planning in warehouse environments. In: Proceedings of International Symposium on Multi-Robot and Multi-agent Systems (MRS). New Brunswick, USA: IEEE, 2019. 10−12 [127] Liu Y H, Zhao W Z, Lutz T, Yue X W. Task allocation and coordinated motion planning for autonomous multi-robot optical inspection systems. Journal of Intelligent Manufacturing, 2022, 33(8): 2457-2470 doi: 10.1007/s10845-021-01803-1 [128] Rigatos G G. Distributed gradient and particle swarm optimization for multi-robot motion planning. Robotica, 2008, 26(3): 357-370 doi: 10.1017/S0263574707004080 [129] Han S D, Yu J J. DDM: Fast near-optimal multi-robot path planning using diversified-path and optimal sub-problem solution database heuristics. IEEE Robotics and Automation Letters, 2020, 5(2): 1350-1357 doi: 10.1109/LRA.2020.2967326 [130] Li J C, Ran M P, Xie L H. Efficient trajectory planning for multiple non-holonomic mobile robots via prioritized trajectory optimization. IEEE Robotics and Automation Letters, 2021, 6(2): 405-412 doi: 10.1109/LRA.2020.3044834 [131] Wagner G, Choset H. M*: A complete multirobot path planning algorithm with performance bounds. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011. 3260−3267 [132] van den Berg J, Lin M, Manocha D. Reciprocal velocity obstacles for real-time multi-agent navigation. In: Proceedings of IEEE International Conference on Robotics and Automation. Pasadena, USA: IEEE, 2008. 1928−1935 [133] van Den Berg J, Guy S J, Lin M, Manocha D. Reciprocal n-body collision avoidance. Robotics Research: The 14th International Symposium ISRR. Berlin, Germany: Springer, 2011. 3−19 [134] Tordesillas J, How J P. MADER: Trajectory planner in multiagent and dynamic environments. IEEE Transactions on Robotics, 2022, 38(1): 463-476 doi: 10.1109/TRO.2021.3080235 [135] Zhou X, Wen X Y, Wang Z P, Gao Y M, Li H J, Wang Q H, et al. Swarm of micro flying robots in the wild. Science Robotics, 2022, 7(66): Article No. eabm5954 doi: 10.1126/scirobotics.abm5954 [136] Thakar S, Rajendran P, Kim H, Kabir A M, Gupta S K. Accelerating bi-directional sampling-based search for motion planning of non-holonomic mobile manipulators. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Las Vegas, USA: IEEE, 2020. 6711−6717 [137] Tallamraju R, Salunkhe D H, Rajappa S, Ahmad A, Karlapalem K, Shah S V. Motion planning for multi-mobile-manipulator payload transport systems. In: Proceedings of IEEE 15th International Conference on Automation Science and Engineering (CASE). Vancouver, Canada: IEEE, 2019. 1469−1474 [138] Pardi T, Maddali V, Ortenzi V, Stolkin R, Marturi N. Path planning for mobile manipulator robots under non-holonomic and task constraints. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas, USA: IEEE, 2020. 6749−6756 [139] Tang Q R, Zhang Y, Yu F C, Zhang J T. An obstacle avoidance approach based on system outlined rectangle for cooperative transportation of multiple mobile manipulators. In: Proceedings of IEEE International Conference on Intelligence and Safety for Robotics (ISR). Shenyang, China: IEEE, 2018. 533−538 [140] Vannoy J, Xiao J. Real-time adaptive motion planning (RAMP) of mobile manipulators in dynamic environments with unforeseen changes. IEEE Transactions on Robotics, 2008, 24(5): 1199-1212 doi: 10.1109/TRO.2008.2003277 [141] Bonilla M, Pallottino L, Bicchi A. Noninteracting constrained motion planning and control for robot manipulators. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017. 4038−4043 [142] Yang Y M, Zhou C J, Tian Y T. Swarm robots task allocation based on response threshold model. In: Proceedings of 4th International Conference on Autonomous Robots and Agents. Wellington, New Zealand: IEEE, 2009. 171−176 [143] Ghassemi P, DePauw D, Chowdhury S. Decentralized dynamic task allocation in swarm robotic systems for disaster response: Extended abstract. In: Proceedings of International Symposium on Multi-robot and Multi-agent Systems (MRS). New Brunswick, USA: IEEE, 2019. 83−85 [144] Vicmudo M P, Dadios E P, Vicerra R R P. Path planning of underwater swarm robots using genetic algorithm. In: Proceedings of International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM). Palawan, Philippines: IEEE, 2014. 1−5 [145] Chella A, Gaglio S, Mannone M, Pilato G, Seidita V, Vella F, et al. Quantum planning for swarm robotics. Robotics and Autonomous Systems, 2023, 161: Article No. 104362 doi: 10.1016/j.robot.2023.104362 -

 下载:
下载:

计量
- 文章访问数: 9182
- HTML全文浏览量: 3001
- PDF下载量: 1102
- 被引次数: 0
