

Event-triggered Cooperative Path Following of Multiple Autonomous Underwater Vehicles
-
摘要: 针对考虑外部海洋环境扰动和内部模型不确定性的多自主水下航行器(Autonomous underwater vehicle, AUV), 研究其在通信资源受限和机载能量受限下的协同路径跟踪控制问题. 首先, 针对水声通信信道窄造成的通信资源受限问题, 设计一种基于事件触发机制(Event-triggered mechanism, ETM)的协同通信策略; 然后, 针对模型不确定性和海洋环境扰动问题, 设计一种基于事件触发机制的线性扩张状态观测器(Extended state observer, ESO)来逼近水下航行器的未知动力学, 并降低了系统采样次数; 最后, 针对机载能量受限问题, 设计一种基于事件触发机制的动力学控制律, 在保证控制精度的前提下, 降低了执行机构的动作频次, 从而节省了能量消耗. 应用级联系统稳定性分析方法, 分别验证了闭环系统是输入状态稳定的且系统不存在Zeno行为. 仿真结果验证了所提基于事件触发机制的多自主水下航行器协同路径跟踪控制方法的有效性.Abstract: A cooperative path following problem under limited communication resources and limited energy of multiple under-actuated autonomous underwater vehicles (AUV) subject to external marine environment disturbances and internal model uncertainty is considered. Firstly, a cooperative communication strategy based on an event-triggered mechanism (ETM) is proposed to solve the problem of limited communication resources caused by the narrow acoustic communication channel. Secondly, a linear extended state observer (ESO) based on an event-triggered mechanism is designed to deal with the model uncertainty and marine environment disturbance, and the observer is used to approximate the unknown dynamics of the underwater vehicles, such that the sampling times of the system could be reduced. Finally, a kinetic control law based on an event-triggered mechanism is designed to deal with the problem of limited energy, and this control law reduces the action times of the actuators while ensuring control accuracy, such that the energy consumption could be saved. It is proved that the closed loop system is input-to-state stable by using a cascade stability analysis, and Zeno behavior is excluded. The simulation results are given to demonstrate the effectiveness of the proposed event-triggered cooperative path following of multiple autonomous underwater vehicles.
-
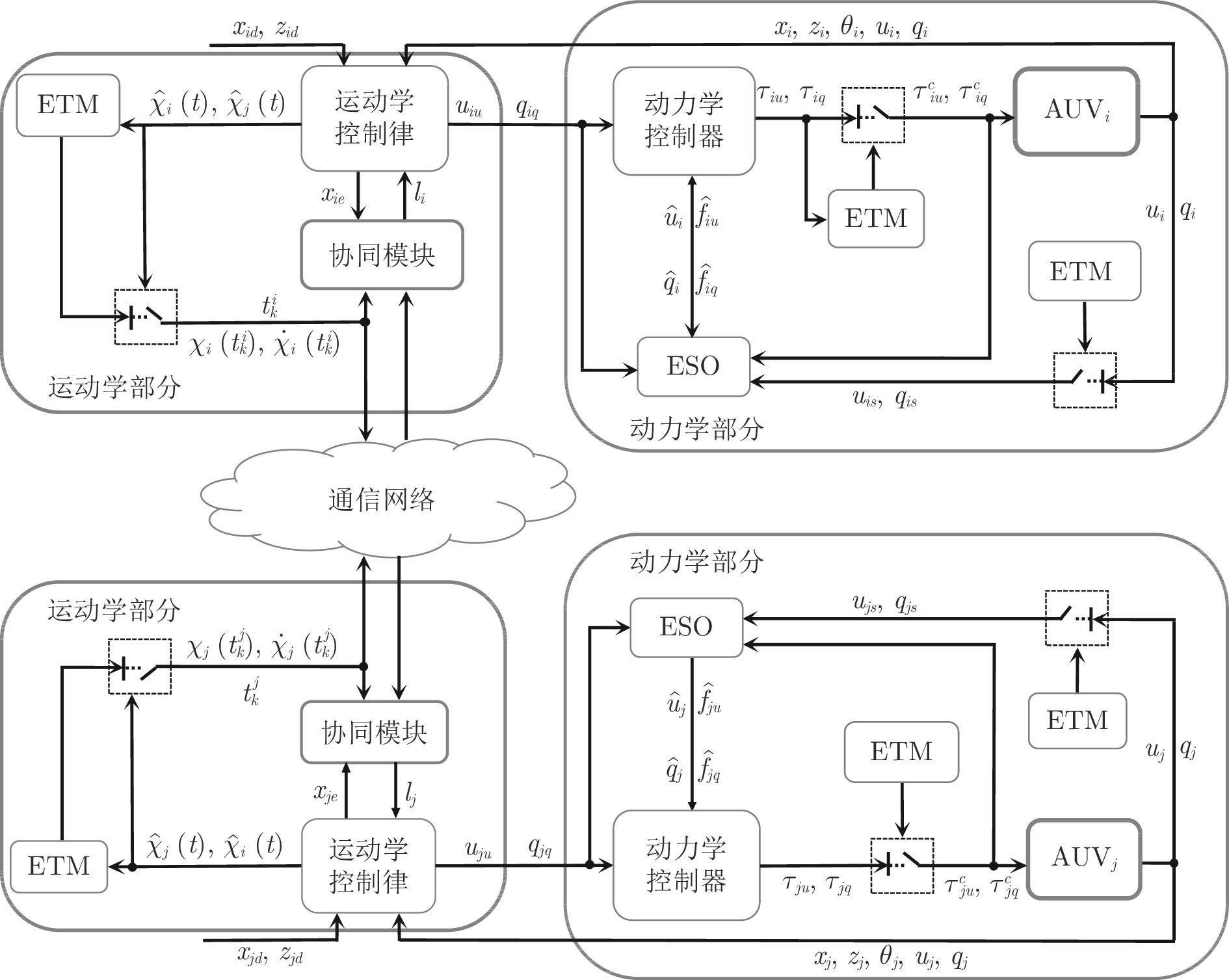
图 2 基于事件触发的协同路径跟踪控制器结构图
Fig. 2 Architecture of event-triggered cooperative path following controller
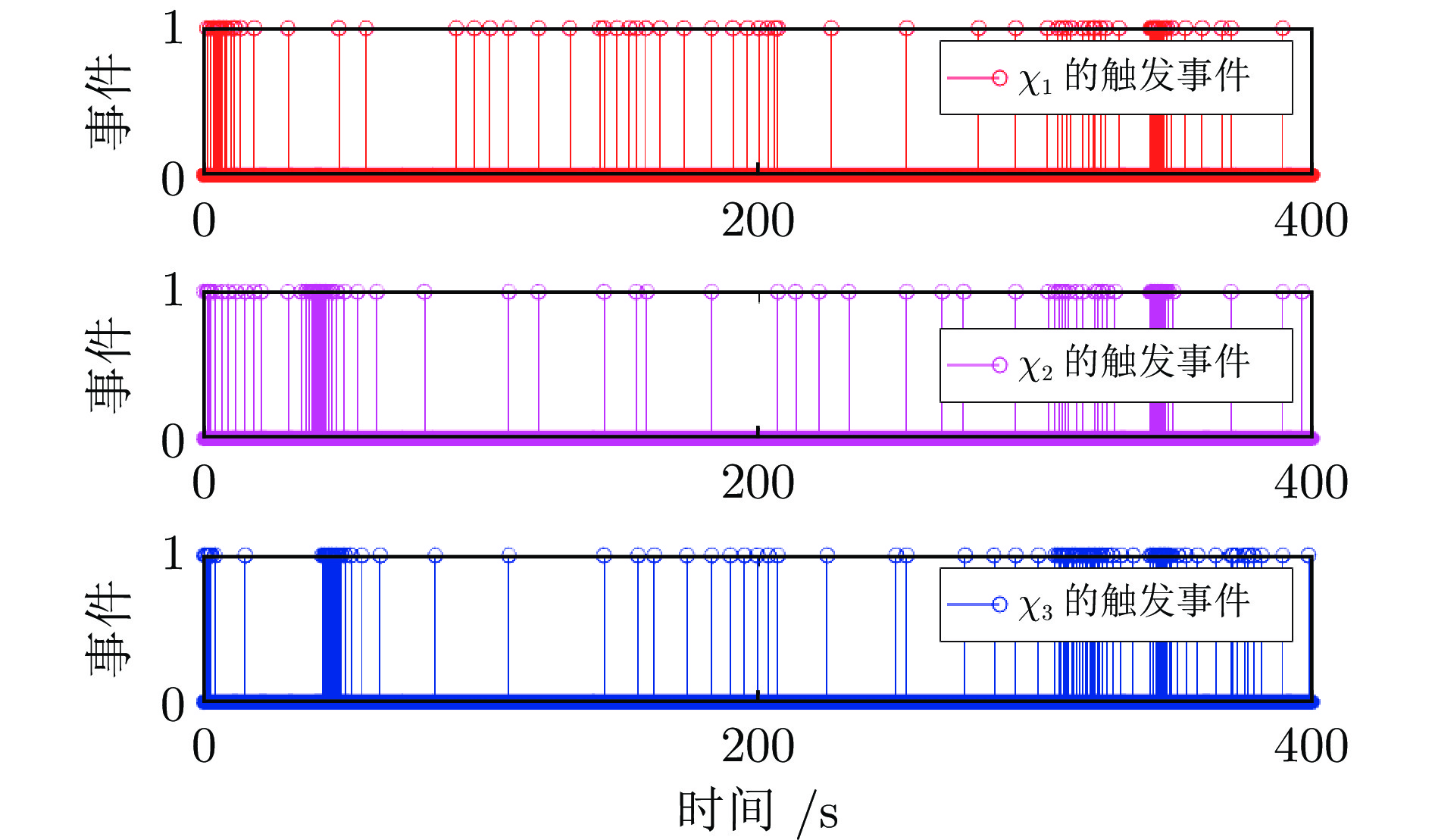
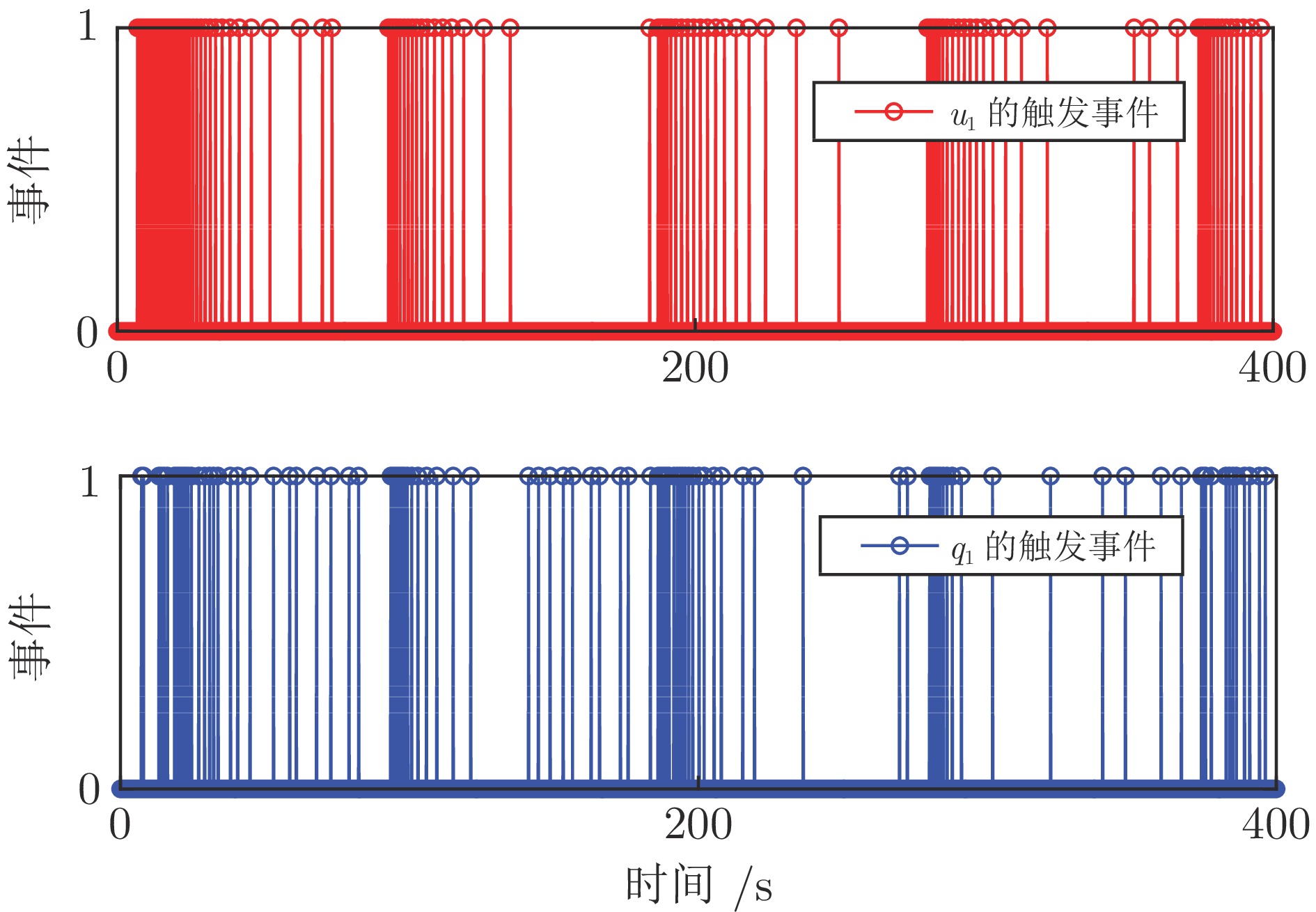
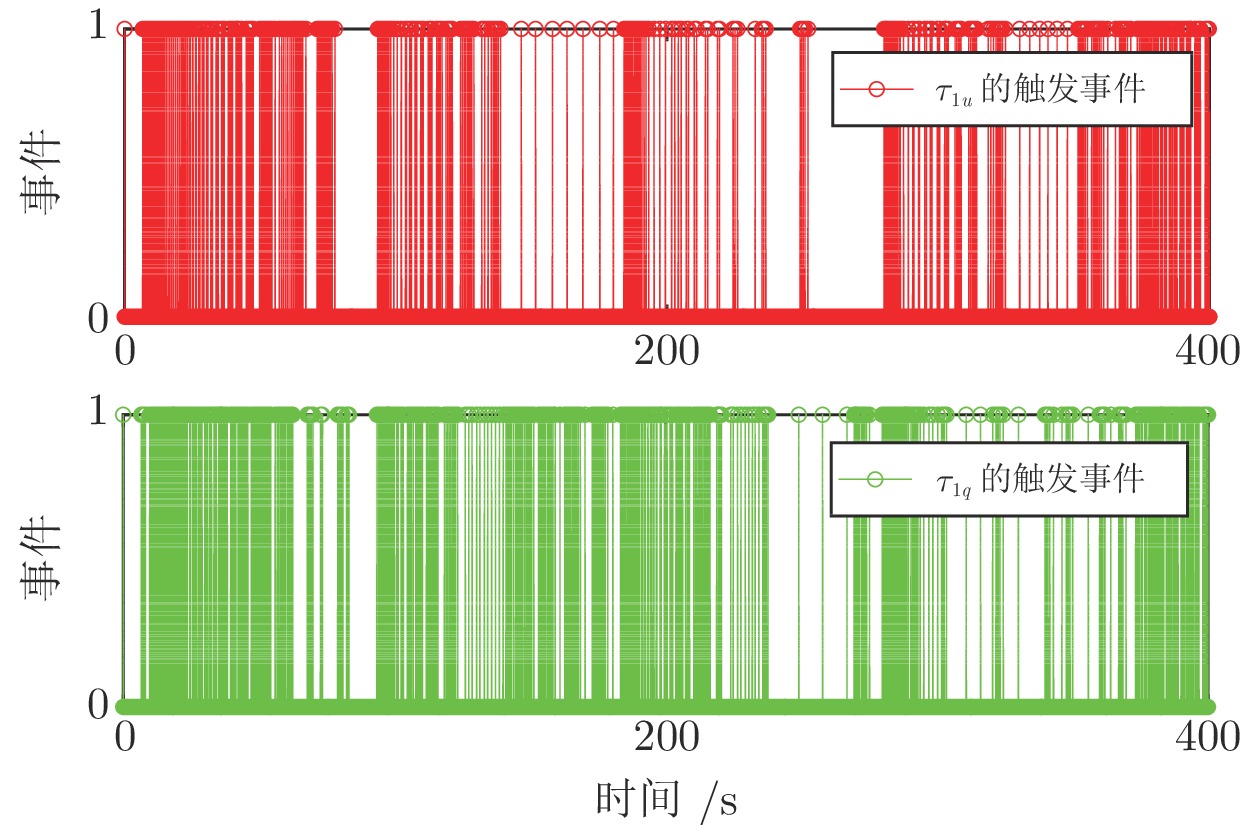
表 1 触发次数
Table 1 Triggering times
触发内容 事件触发 时间触发 采样
周期
(s)百分比
最大值
(%)AUV1 AUV2 AUV3 AUV$i$
($i$=1, 2, 3)协同次数($\chi_{i}$) 91 102 124 10 000 0.04 1.24 采样次数($u_{i}$) 324 352 420 10 000 0.04 4.20 采样次数($q_{i}$) 286 363 297 10 000 0.04 3.63 执行次数($\tau_{iu}$) 585 592 451 10 000 0.04 5.92 执行次数($\tau_{iq}$) 487 523 553 10 000 0.04 5.53  下载: 导出CSV
下载: 导出CSV
-
[1] 刘妹琴, 韩学艳, 张森林, 郑荣濠, 兰剑. 基于水下传感器网络的目标跟踪技术研究现状与展望. 自动化学报, 2021, 47(2): 235−251 doi: 10.16383/j.aas.c190886Liu Mei-Qin, Han Xue-Yan, Zhang Sen-Lin, Zheng Rong-Hao, Lan Jian. Research status and prospect of target tracking technologies via underwater sensor networks. Acta Automatica Sinica, 2021, 47(2): 235−251 doi: 10.16383/j.aas.c190886 [2] Gafurov S A, Klochkov E V. Autonomous unmanned underwater vehicles development tendencies. Procedia Engineering, 2015, 106(1): 141−148 [3] 马广富, 梅杰. 多星系统相对轨道的自适应协同控制. 控制理论与应用, 2011, 28(6): 781−787Ma Guang-Fu, Mei Jie. Adaptive cooperative control for relative orbits of multi-satellite systems. Control Theory & Applications, 2011, 28(6): 781−787 [4] 王银涛, 严卫生. 多自主水下航行器系统一致性编队跟踪控制. 控制理论与应用, 2013, 30(3): 379−384 doi: 10.7641/CTA.2013.20422Wang Yin-Tao, Yan Wei-Sheng. Consensus formation tracking control of multiple autonomous underwater vehicle systems. Control Theory & Applications, 2013, 30(3): 379−384 doi: 10.7641/CTA.2013.20422 [5] Gu N, Wang D, Peng Z H, Liu L. Adaptive bounded neural network control for coordinated path-following of networked under-actuated autonomous surface vehicles under time-varying state-dependent cyber-attack. ISA Transactions, 2019, 104: 212−221 [6] Ding L, Han Q L, Ge X, Zhang X. An overview of recent advances in event-triggered consensus of multi-agent system. IEEE Transactions on Cybernetics, 2018, 48(4): 1110−1123 doi: 10.1109/TCYB.2017.2771560 [7] Liu L, Wang D, Peng Z H, Li T S. Modular adaptive control for LOS-based cooperative path maneuvering of multiple under-actuated autonomous surface vehicles. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47: 1613−1624 doi: 10.1109/TSMC.2017.2650219 [8] Wang H L, Wang D, Wang T L, Zhang Y B, Gu N. Adaptive cooperative diving of saucer-type underwater gliders subject to model uncertainties and input constraints. IEEE Access, 2019, 7: 60042−60054 doi: 10.1109/ACCESS.2019.2915160 [9] Peng Z H, Liu L, Wang J. Output-feedback flocking control of multiple autonomous surface vehicles based on data-driven adaptive extended state observers. IEEE Transactions on Cybern-etics, 2020, 99: 4611−4622 [10] 徐博, 白金磊, 郝燕玲, 高伟, 刘亚龙. 多AUV协同导航问题的研究现状与进展. 自动化学报, 2015, 41(3): 445−461 doi: 10.16383/j.aas.2015.c140047Xu Bo, Bai Jin-Lei, Hao Yan-Ling, Gao Wei, Liu Ya-Long. The research status and progress of cooperative navigation for multiple autonomous underwater vehicle. Acta Automatica Sinica, 2015, 41(3): 445−461 doi: 10.16383/j.aas.2015.c140047 [11] Lal C, Petroccia R, Pelekanakis K, Conti M, Alves J. Toward the development of secure underwater acoustic networks. IEEE Journal of Oceanic Engineering, 2017, 42(4): 1075−1087 doi: 10.1109/JOE.2017.2716599 [12] Wang Y T, Yao Y. Consensus path-following control of multi-ple under-actuated unmanned underwater vehicles. Complexity, 2018: 1−8 [13] Peng Z H, Wang D, Wang J. Cooperative dynamic positioning of multiple marine offshore vessels: A modular design. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 1210−1221 [14] Wang H L, Lu L, Dan W, Wang T L. Output-feedback control for cooperative diving of saucer-type underwater gliders based on a fuzzy observer and event-triggered communication. IEEE Access, 2019, 7: 50453−50465 doi: 10.1109/ACCESS.2019.2911194 [15] Morales R, Sira-Ramírez H, Somolinos J A. Linear active disturbance rejection control of the hovercraft vessel model. Ocean Engineering, 2015, 96: 100−108 doi: 10.1016/j.oceaneng.2014.12.031 [16] 吴文涛, 彭周华, 王丹, 刘陆, 姜继洲, 任帅. 基于扩张状态观测器的双桨推进无人艇抗干扰目标跟踪控制. 中国舰船研究, 2021, 16(1): 128−135 doi: 10.19693/j.issn.1673-3185.01665Wu Wen-Tao, Peng Zhou-Hua, Wang Dan, Liu Lu, Jiang Ji-Zhou, Ren Shuai. ESO based anti-disturbance target tracking control for twin-screw unmanned surface vehicle. Chinese Journal of Ship Research, 2021, 16(1): 128−135 doi: 10.19693/j.issn.1673-3185.01665 [17] Gao Z Q. Active disturbance rejection control: A paradigm shift in feedback control system design. In: Proceedings of the American Control Conference. Minneapolis, USA: IEEE, 2006. 2399− 2405 [18] Xue W C, Chen S, Zhao C, Huang Y, Su J B. On integrating uncertainty estimator into PI control for a class of nonlinear uncertain systems. IEEE Transactions on Automatic Control, 2021, 66(7): 3409−3416 doi: 10.1109/TAC.2020.3024475 [19] Lu Y, Zhang G Q, Sun Z J, Zhang W D. Robust adaptive formation control of under-actuated autonomous surface vessels based on MLP and DOB. Nonlinear Dynamics, 2018, 94: 503− 519 doi: 10.1007/s11071-018-4374-z [20] Silvestre C, Cunha R, Paulino N, Pascoal A. A bottom-following preview controller for autonomous underwater vehicles. IEEE Transactions on Control Systems Technology, 2009, 17(2): 257−266 doi: 10.1109/TCST.2008.922560 [21] Adhami-Mirhosseini A, Yazdanpanah M J, Aguiar A P. Automatic bottom-following for underwater robotic vehicles. Automatica, 2014, 50(8): 2155−2162 doi: 10.1016/j.automatica.2014.06.003 [22] Pettersen K Y, Egeland O. Time-varying exponential stabilization of the position and attitude of an under-actuated autonomous underwater vehicle. IEEE Transactions on Automatic Control, 1999, 44(1): 112−115 doi: 10.1109/9.739086 [23] Krstic M, Kanellakopoulos I, Kokotovic P. Nonlinear and Adaptive Control Design. New York: John Wiley & Sons Incorporated, 1995. 501−507 -

 下载:
下载:

图(10) / 表(1)
计量
- 文章访问数: 2269
- HTML全文浏览量: 805
- PDF下载量: 423
- 被引次数: 0
