

Data-driven Model-free Adaptive Control Method for High-speed Electric Multiple Unit
-
摘要: 针对动车组的速度跟踪控制问题, 同时考虑到现有基于模型的控制方法对系统动力学模型的依赖性, 以及传统无模型自适应控制时变参数估计算法的复杂性, 将改进的多输入多输出(Multiple-input multiple-output, MIMO)偏格式动态线性化无模型自适应控制(Partial form dynamic linearization-improved model-free adaptive control, PFDL-iMFAC)方法引入到动车组自动驾驶系统中. 该控制方法在无模型自适应控制的基础上, 考虑滑动时间窗口, 增加了可调自由度和设计灵活性, 并在输入准则函数中加上对能量函数的惩罚项, 减少能量损耗, 为动车组的跟踪精度和节能运行提供了一种优化的方法, 在满足动车组速度跟踪效果好的前提下实现节能运行. 最后以CRH380A动车组为对象进行仿真实验, 通过与传统无模型自适应控制对比: 所提出的控制算法各动力单元速度跟踪误差在 ±0.2 km/h以内, 加速度在 ±0.65 m/s2以内且变化平稳, 比传统无模型自适应控制方法节约9.86%的能量.Abstract: For the speed tracking control problem of electric multiple unit, the dependence of the existing model-based control methods on the system dynamic model and the complexity of the time-varying parameter estimation algorithm of the traditional model-free adaptive control are both considered. The improved multiple-input multiple-output (MIMO) partial format dynamic linearization-improved model-free adaptive control (PFDL-iMFAC) method is introduced into the automatic train operation system. On the basis of model-free adaptive control, this control method considers the sliding time window, increases the adjustable degree of freedom and design flexibility, and adds the penalty term to the energy function in the input criterion function to reduce the energy loss. It provides a compromise method for the tracking accuracy and energy-saving operation of electric multiple unit, and realizes energy-saving operation under the premise of satisfying the good speed tracking effect of electric multiple unit. Finally, CRH380A electric multiple unit is taken as the object for simulation experiment. Compared with the traditional model-free adaptive control, the speed tracking error of each power unit in the proposed control algorithm is within ±0.2 km/h, and the acceleration one is within ±0.65 m/s2 and the change is stable, saving 9.86% of energy compared with the traditional model-free adaptive control method.
-

图 1 动车组运行过程动力学描述
Fig. 1 Dynamic description of electric multiple unit operation process
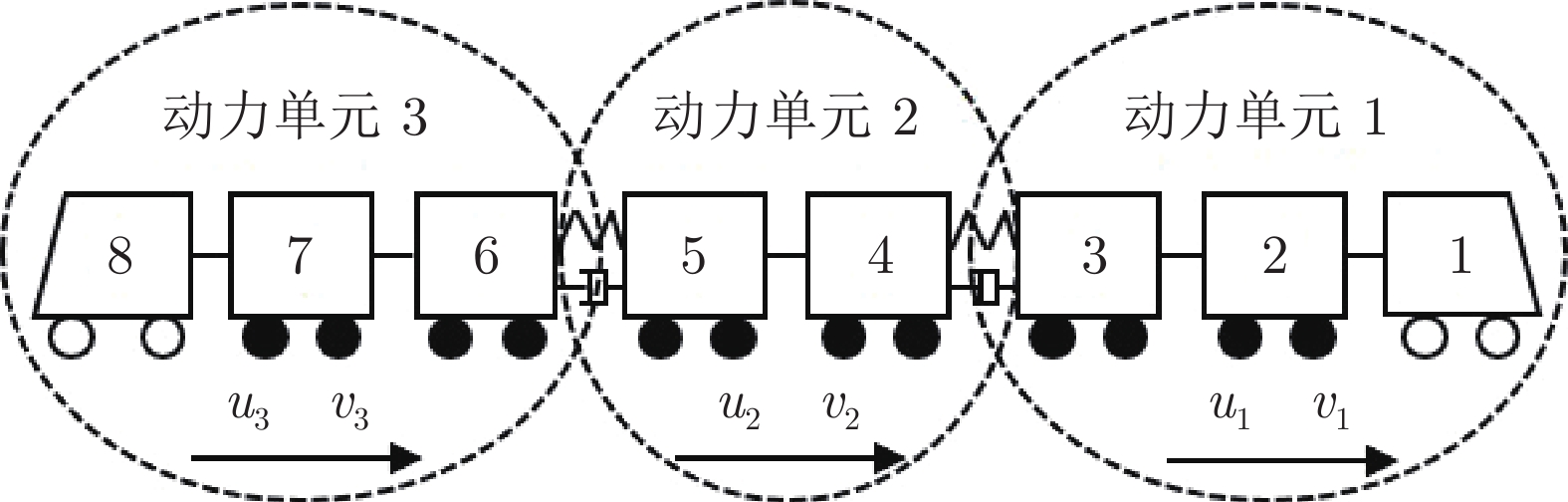
图 2 CRH380A型动车组动力单元分布
Fig. 2 Distribution of CRH380A electric multiple unit power unit
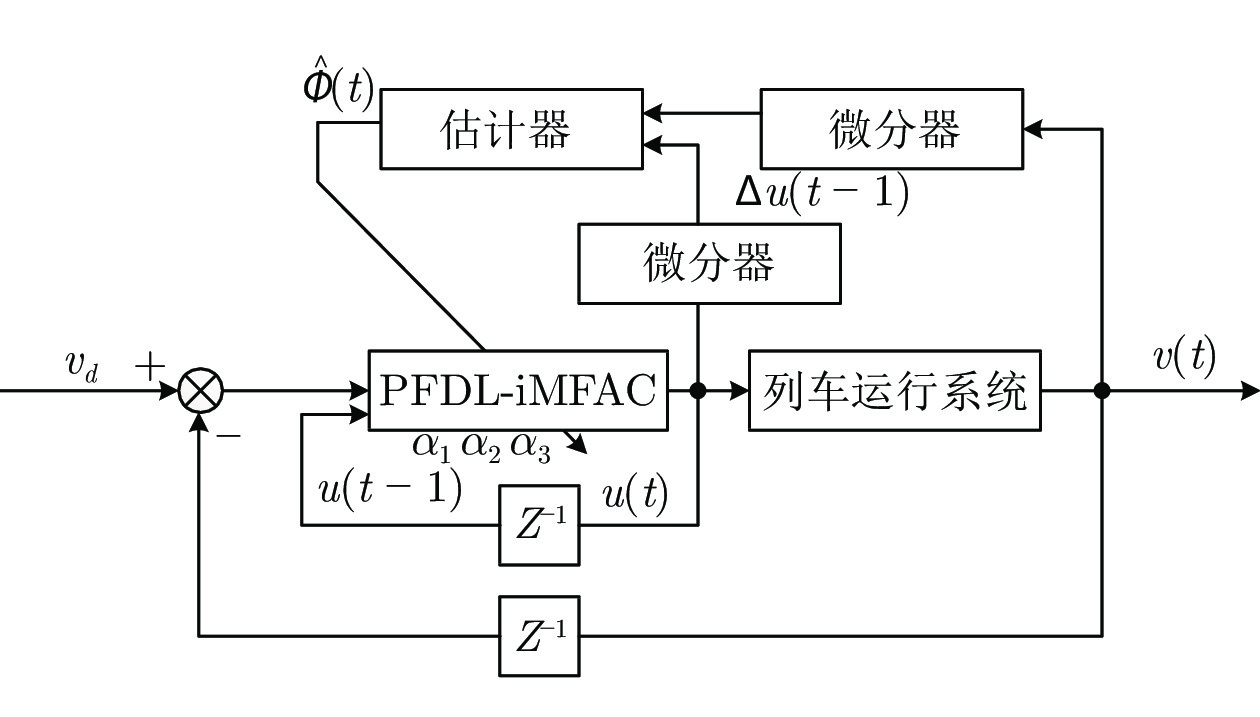
图 3 改进的动车组无模型自适应控制结构框图
Fig. 3 An improved block diagram of model-free adaptive control structure for electricmultiple unit
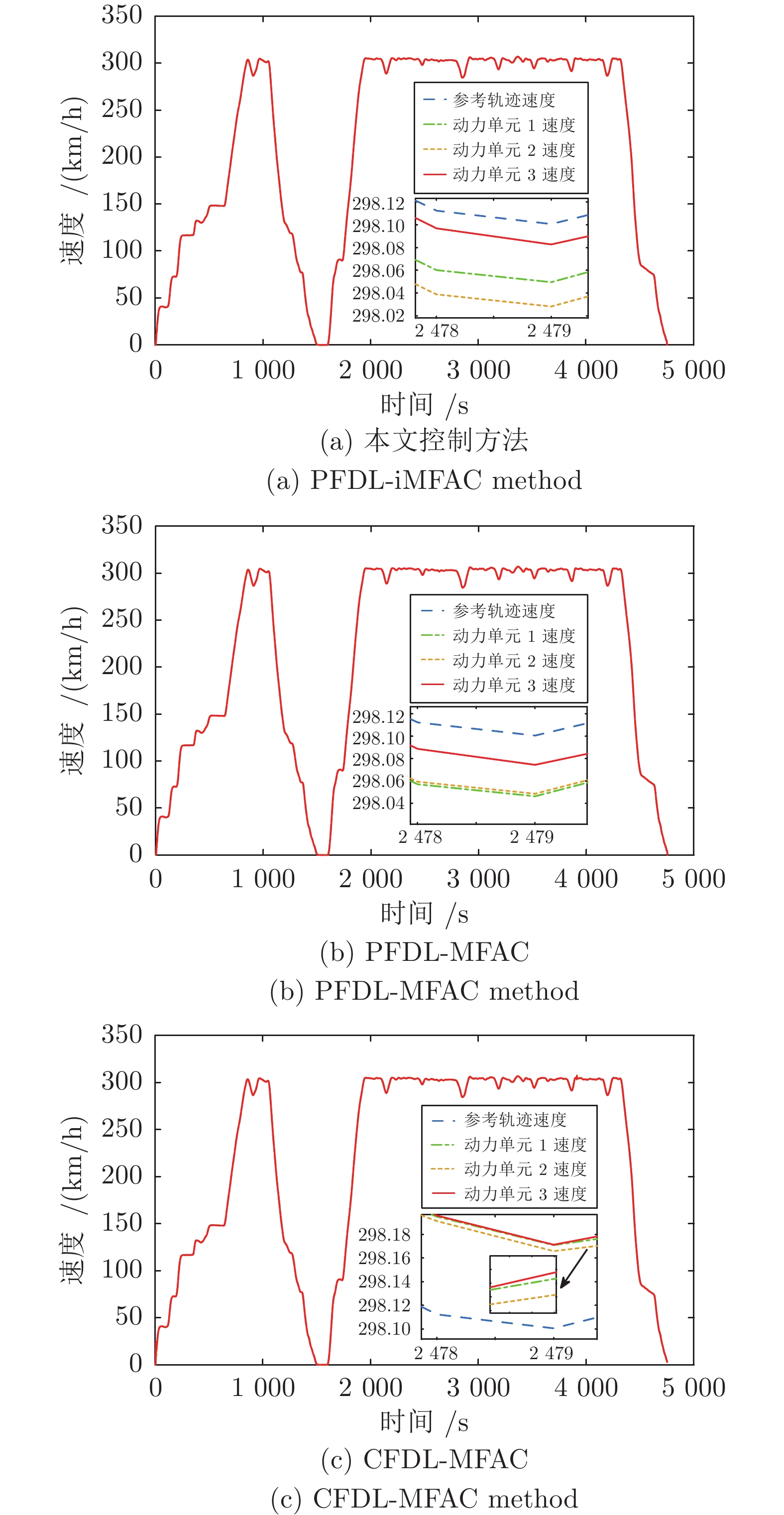
图 4 本文方法与其他方法速度跟踪曲线对比
Fig. 4 The velocity tracking curves of the proposed method are compared with those of other methods

图 5 本文方法与其他方法各动力单元速度跟踪误差对比
Fig. 5 The velocity tracking errors of the proposed method are compared with those of other methods
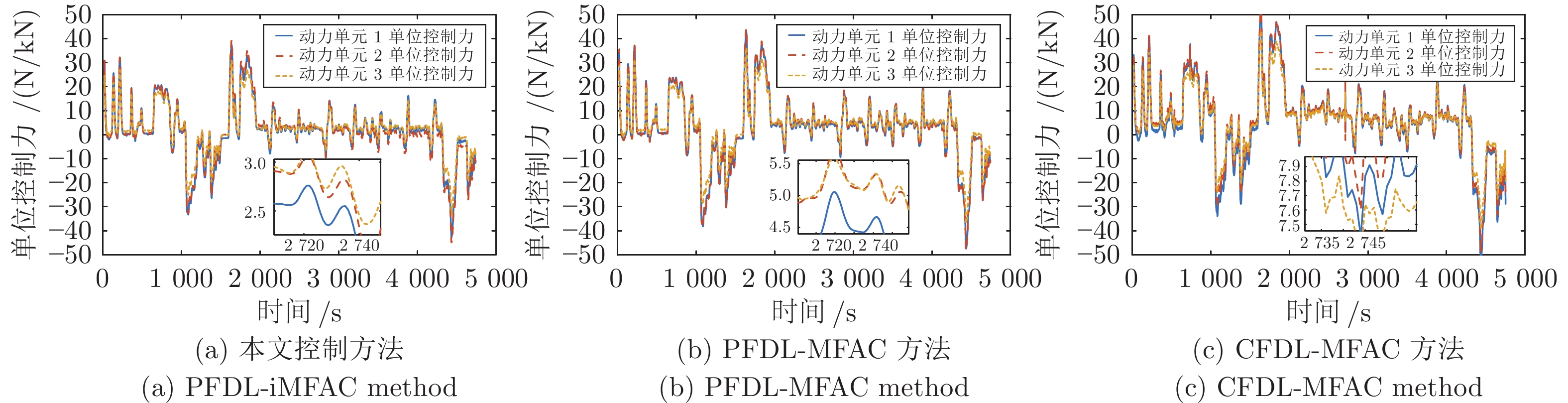
图 6 本文方法与其他方法单位控制力变化对比
Fig. 6 The variation of unit control force is compared with other methods
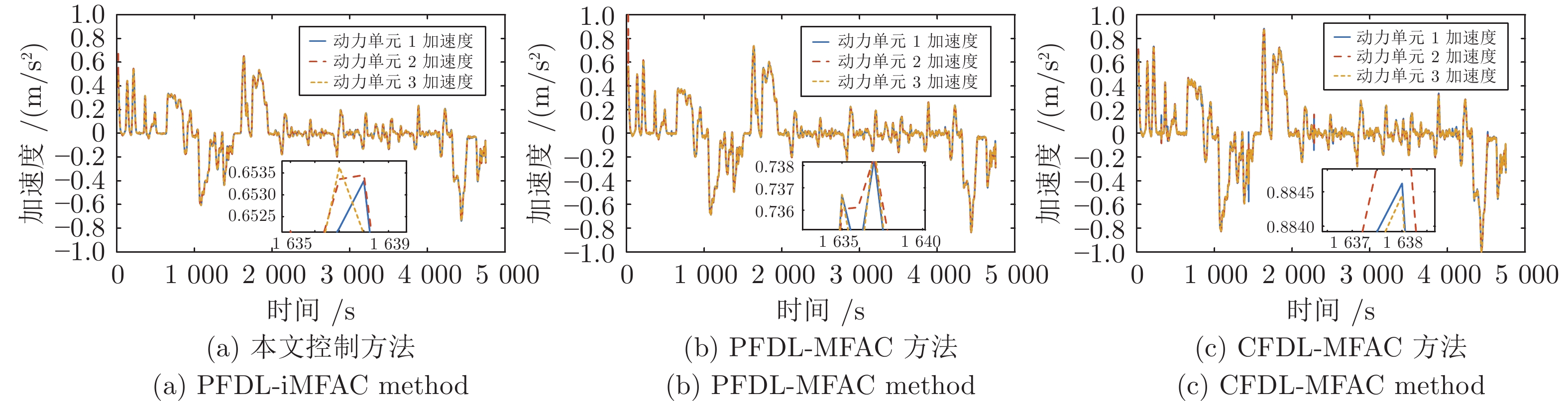
图 7 本文方法与其他方法加速度变化对比
Fig. 7 The acceleration changes of the proposed method are compared with other methods
表 1 CRH380A型动车组模型参数
Table 1 The CRH380A electric multiple unitmodel parameters
参数名称 参数值 单位 动力单元质量$M_1$ $ 1.836\times 10^5$ kg 动力单元质量$M_2$ $ 1.123\times 10^5 $ kg 动力单元质量$M_3$ $ 1.836\times 10^5 $ kg 列车阻力系数$a_r$ 5.2 N/kg 列车阻力系数$b_r$ $ 3.6\times 10^{-2} $ ${\rm{N} } \cdot {\rm{s} }^2/({\rm{kg} } \cdot {\rm{m} })$ 列车阻力系数$c_r$ $ 1.2\times 10^{-3} $ ${\rm{N} } \cdot {\rm{s} }^2/({\rm{kg} } \cdot {\rm{m}^2 })$ 车钩弹性系数$k$ $ 2\times 10^7 $ N/m 车钩阻尼系数$d$ $ 5\times 10^6 $ ${\rm{N}} \cdot {\rm{s/m} }$  下载: 导出CSV
下载: 导出CSV
表 2 各个控制方法的若干性能指标对比
Table 2 Comparison of several performance indexes of each control method
控制方法 均方误差 最大加减速度 (m/s2) 能量损耗 节约率 (%) 文献[19] $1.2\times 10^{-2} $ 1.0848 $ 2.41\times 10^6 $ — PFDL-MFAC $6.2\times 10^{-3} $ 0.7309 $2.29\times 10^6 $ $5.04$ PFDL-iMFAC $6.6\times 10^{-3} $ 0.6572 $2.17\times 10^6$ $9.86 $
下载: 导出CSV
-
[1] 汪仁智, 李德伟, 席裕庚. 采用预测控制的地铁节能优化控制算法. 控制理论与应用, 2017, 34(9): 1129-1135 doi: 10.7641/CTA.2017.60861Wang Ren-Zhi, Li De-Wei, Xi Yu-Geng.Metro energy saving optimization algorithm by using model predictive control. Control Theory & Applications, 2017, 34(9): 1129-1135 doi: 10.7641/CTA.2017.60861 [2] 杨辉, 张坤鹏, 王昕, 衷路生. 高速列车多模型广义预测控制方法. 铁道学报, 2011, 33(8): 80-87 doi: 10.3969/j.issn.1001-8360.2011.08.014Yang Hui, Zhang Kun-Peng, Wang Xin, Zhong Lu-Sheng. Generalized multiple model predictive control method of high-speed train. Journal of the China Railway Society, 2011, 33(8): 80-87 doi: 10.3969/j.issn.1001-8360.2011.08.014 [3] 衷路生, 李兵, 龚锦红, 张永贤, 祝振敏. 高速列车非线性模型的极大似然辨识. 自动化学报, 2014, 40(12): 2950-2958Zhong Lu-Sheng, Li Bing, Gong Jin-Hong, Zhang Yong-Xian, Zhu Zhen-Min. Maximum likelihood identification of nonlinear model for high-speed train. Acta Automatica Sinica, 2014, 40(12): 2950-2958 [4] Liu X Y, Xun J, Ning B, Wang C. Braking process identification of high-speed trains for automatic train stop control. ISA Transactions, 2020, doi: 10.1016/j.isatra.2020.10.059 [5] 贾超. 考虑安全约束的列车自动驾驶多质点非线性预测控制 [博士论文], 北京交通大学, 中国, 2020Jia Chao. Nonlinear Predictive Control for Automatic Train Operation With Consideration of Safety Constraints and Multi-Point Model [Ph.D. dissertation], Beijing Jiaotong University, China, 2020 [6] 李中奇, 金柏, 杨辉, 谭畅, 付雅婷. 高速动车组强耦合模型的分布式滑模控制策略. 自动化学报, 2020, 46(3): 495-508Li Zhong-Qi, Jin Bai, Yang Hui, Tang Chang, Fu Ya-Ting. Predictive control using a distributed model for electric multiple unit. Acta Automatica Sinica, 2020, 46(3): 495-508 [7] Wu X, Zhang K J, Cheng M. Adaptive numerical approach for optimal control of a single train. Journal of Systems Science & Complexity, 2019, 32(4): 1053-1071 [8] Yang Y Q, Mao B H, Wang M. Research on freight train operation control simulation on long steep downhill lines. ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, Part A: Civil Engineering, 2021, 7(3): 05021003 [9] 侯忠生. 非线性系统参数辩识、自适应控制及无模型学习自适应控制 [博士论文], 东北大学, 中国, 1994Hou Zhong-Sheng. Nonlinear System Parameter Identification, Adaptive Control and Model Free Adaptive Learning Control [Ph.D. dissertation], Northeastern University, China, 1994 [10] 温亮, 周平. 基于多参数灵敏度分析与遗传优化的铁水质量无模型自适应控制. 自动化学报, 2021, 47(11): 2600-2613Wen Liang, Zhou Ping. Model-free adaptive control of molten iron quality based on multi-parameter sensitivity analysis and GA optimization. Acta Automatica Sinica, 2021, 47(11): 2600-2613 [11] Ma Y S, Che W W, Deng C, Wu Z G. Distributed model-free adaptive control for learning nonlinear MASs under DoS attacks. IEEE transactions on neural networks and learning systems, 2021, doi: 10.1109/TNNLS.2021.3104978 [12] Wang H Z, Fang L J, Song T Z, Xu J Q, Shen H S. Model-free adaptive sliding mode control with adjustable funnel boundary for robot manipulators with uncertainties. The Review of scientific instruments, 2021, 92(6), 065101 doi: 10.1063/5.0037054 [13] 李醒, 王晓峰. 不确定机器人系统无模型自适应滑模控制方法. 南京理工大学学报, 2015, 39(6): 655-660Li Xing, Wang Xiao-Feng. Model-free adaptive sliding mode control method for uncertain robot system. Journal of Nanjing University of Science and Technology, 2015, 39(6): 655-660 [14] Li X S, Ren Y Y, Zheng X Li, Liu L. Model-free adaptive control for tank truck rollover stabilization. Mathematical Problems in Engineering, 2021, 2021(3): 1-16 [15] 姚文龙, 庞震, 池荣虎, 邵巍. 环卫车辆轨迹跟踪系统的无模型自适应迭代学习控制. 控制理论与应用, 2022, 39(1): 101-108 doi: 10.7641/CTA.2021.00797Yao Wen-Long, Pang Zhen, Chi Rong-Hu, Shao Wei. Track tracking control of sanitation vehicle based on model-free adaptive iterative learning control. Control Theory & Applications, 2022, 39(1): 101-108 doi: 10.7641/CTA.2021.00797 [16] 潘晓龙, 鲜斌. 小型无人直升机的无模型自适应鲁棒控制设计. 控制理论与应用, 2017, 34(9): 1171-1178 doi: 10.7641/CTA.2017.70029Pan Xiao-Long, Xian Bin. Model-free adaptive robust control design for a small unmanned helicopter. Control Theory & Applications, 2017, 34(9): 1171-1178 doi: 10.7641/CTA.2017.70029 [17] Yang W, Yin C K, Hou Z S. A novel energy efficient operation strategy for a train based on model-free adaptive predictive control. In: Proceedings of the 31st Chinese Control Conference. Hefei, China: 2012. 1523−1528 [18] Wang H J, Hou Z S, Jin S T. Model-free adaptive fault-tolerant control for multiple point-mass subway trains with speed and traction/braking force constraints. IFAC PapersOnLine, 2020, 53(2): 3916-3921 doi: 10.1016/j.ifacol.2020.12.2239 [19] 石卫师. 基于无模型自适应控制的城轨列车自动驾驶研究. 铁道学报, 2016, 38(3): 72-77 doi: 10.3969/j.issn.1001-8360.2016.03.010Shi Wei-Shi. Research on automatic train operation based on model-free adaptive control. Journal of the China Railway Society, 2016, 38(3): 72-77 doi: 10.3969/j.issn.1001-8360.2016.03.010 [20] 王海, 刘根锋, 侯忠生. 高速列车数据驱动无模型自适应容错控制. 控制与决策, 2022, 37(5): 1127-1136Wang Hai, Liu Gen-Feng, Hou Zhong-Sheng. Data-driven model-dree adaptive fault tolerant control for high-speed train. Control and Decision, 2022, 37(5): 1127-1136 [21] 李中奇. 高速动车组自适应速度跟踪控制 [博士论文], 南昌大学, 中国, 2015Li Zhong-Qi. Adaptive Speed Tracking Control for High-Speed EMU [Ph.D. dissertation], Nanchang University, China, 2015 [22] 李中奇, 杨辉, 刘明杰, 刘杰民. 高速动车组制动过程的建模及跟踪控制. 中国铁道科学, 2016, 37(5): 80-86 doi: 10.3969/j.issn.1001-4632.2016.05.11Li Zhong-Qi, Yang Hui, Liu Ming-Jie, Liu Jie-Min. Modeling and tracking control for braking process of high-speed electric multiple unit. China Railway Science, 2016, 37(5): 80-86 doi: 10.3969/j.issn.1001-4632.2016.05.11 [23] 丁盼. 基于多质点模型的高速列车自适应速度跟踪控制 [硕士论文], 华东交通大学, 中国, 2021Ding Pang. A Multiple Point-Mass Model based High-Speed Train Adaptive Dpeed Tracking Control Scheme [Master thesis], East China Jiaotong University, China, 2021 [24] Yang Y M, Yan F. Research on train dynamic coupling strategy based on distributed model predictive control. Journal of Physics: Conference Series, 2022, 2183(12029): 1-12 [25] 侯忠生. 无模型自适应控制的现状与展望. 控制理论与应用, 2006(4): 586-592 doi: 10.3969/j.issn.1000-8152.2006.04.017Hou Zhong-Sheng. On model-free adaptive control: the state of the art and perspective. Control Theory & Applications, 2006(4): 586-592 doi: 10.3969/j.issn.1000-8152.2006.04.017 [26] 侯忠生. 再论无模型自适应控制. 系统科学与数学, 2014, 34(10): 1182-1191Hou Zhong-Sheng. Highlight and perspective on model free adaptive control. Journal of Systems Science and Mathematical Sciences, 2014, 34(10): 1182-1191 [27] 金尚泰. 无模型学习自适应控制的若干问题研究及其应用 [博士论文], 北京交通大学, 中国, 2008Jin Shang-Tai. On Model Free Learning Adaptive Control and Applications [Ph.D. dissertation], Beijing Jiaotong University, China, 2008 [28] Hou Z S, Jin S T. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE transactions on neural networks, 2011, 22(12) : 2173-2188 doi: 10.1109/TNN.2011.2176141 [29] 李中奇, 丁俊英, 杨辉, 刘江. 基于控制器匹配的高速列车广义预测控制方法. 铁道学报, 2018, 40(9): 82-89 doi: 10.3969/j.issn.1001-8360.2018.09.012Li Zhong-Qi, Ding Jun-Ying, Yang Hui, Liu Jiang. Generalized predictive control tuning for high-speed train based on controller matching method. Journal of the China Railway Society, 2018, 40(9): 82-89 doi: 10.3969/j.issn.1001-8360.2018.09.012 [30] 冯增喜, 张聪, 李丙辉. 基于改进粒子群优化算法的MFAC参数寻优. 控制工程, 2021, 28(4): 766-773Feng Zeng-Xi, Zhang Cong, Li Bing-Hui. Optimization of MFAC parameters based on improved particle swarm optimization algorithm. Control Engineering of China, 2021, 28(4): 766-773 [31] 基于改进卡尔曼滤波器的扰动抑制无模型自适应控制方案. 控制理论与应用, to be publishedModel-free adaptive control with disturbance rejection based on modified Kalman filter. Control Theory & Applications, to be published -

 下载:
下载:

计量
- 文章访问数: 2392
- HTML全文浏览量: 441
- PDF下载量: 375
- 被引次数: 0
