

-
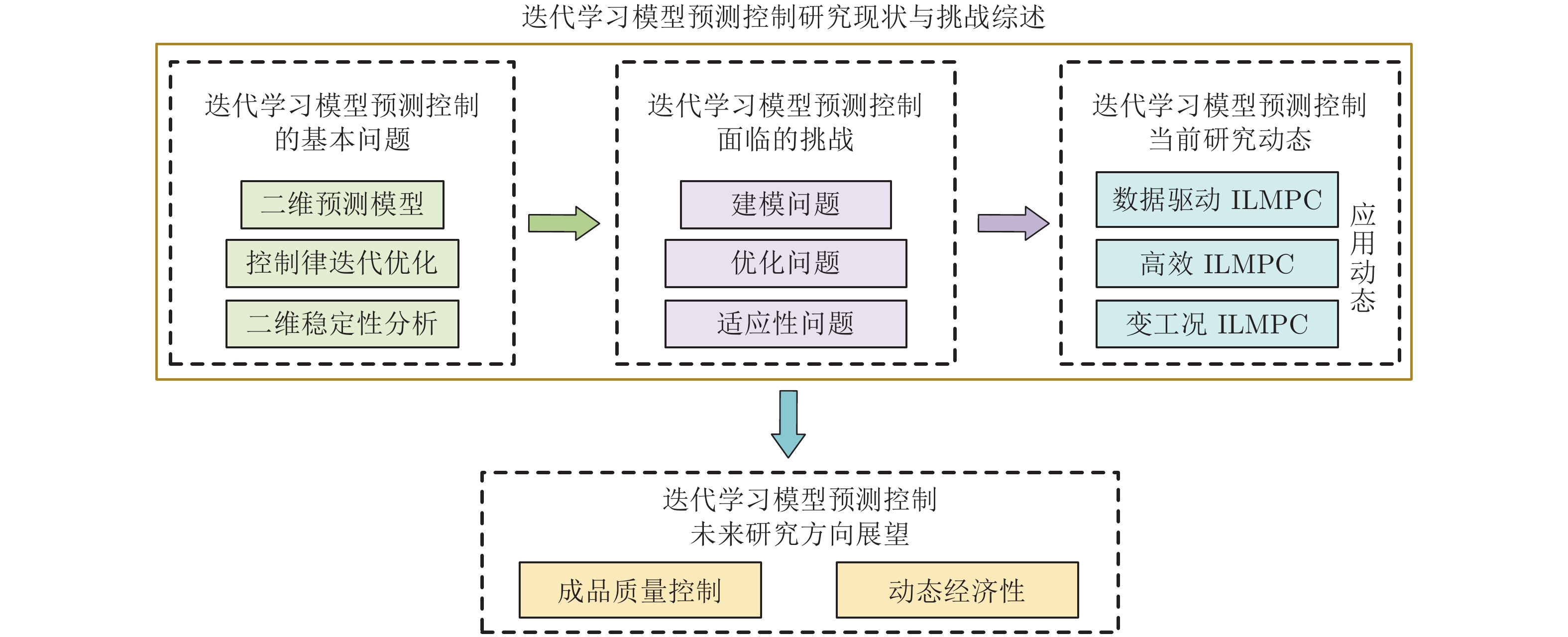
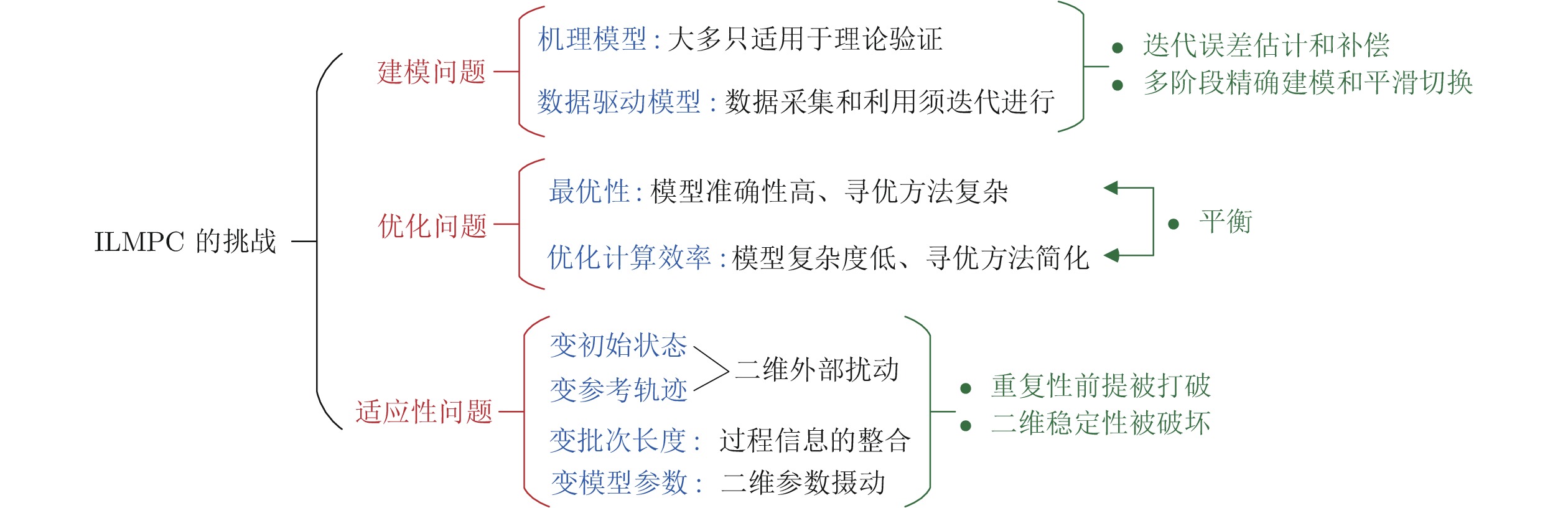
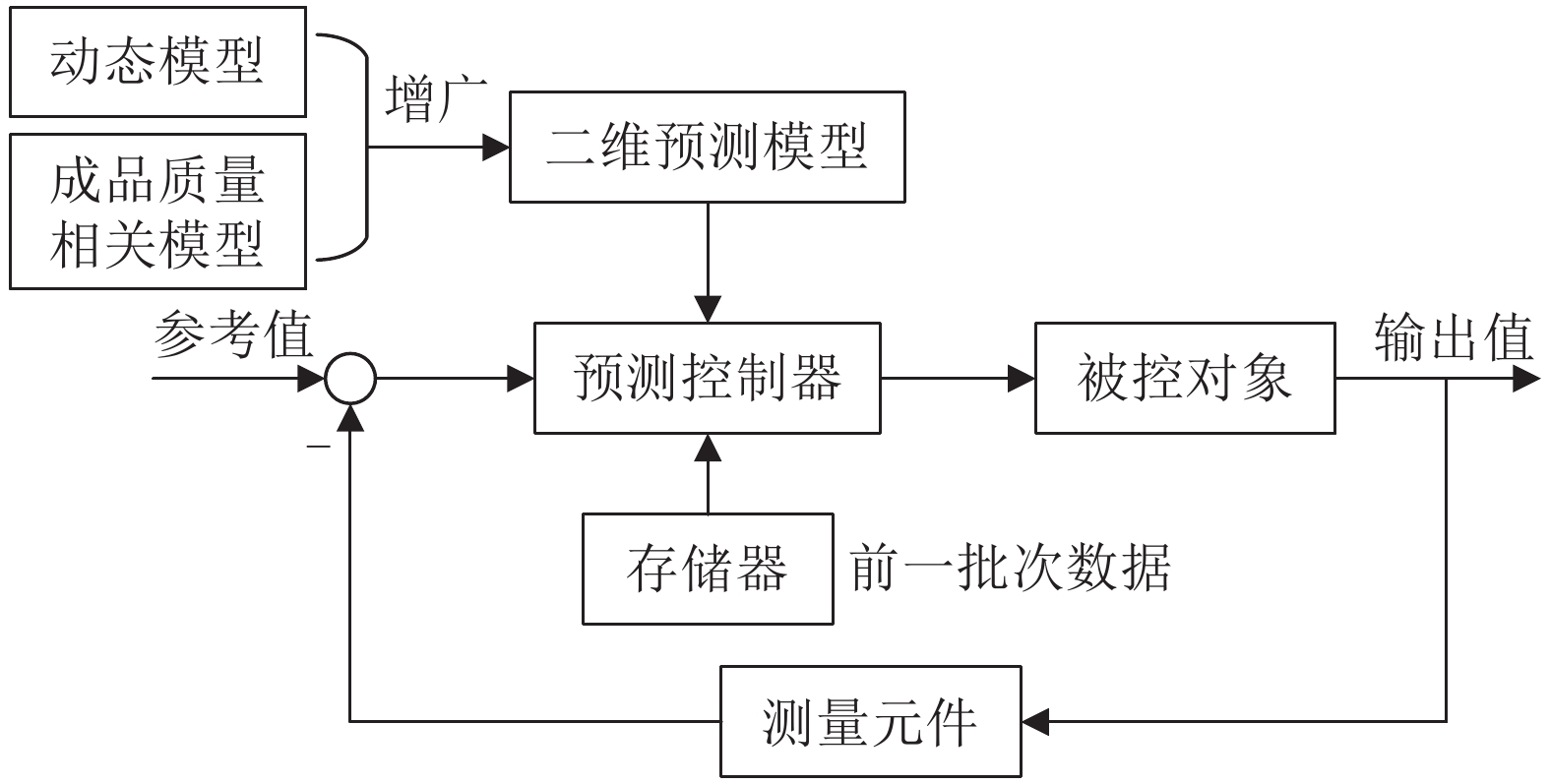
摘要: 历经20多年的发展, 迭代学习模型预测控制在理论和应用方面都取得了长足的进步. 但由于批次工业过程复杂多样、结构各异、精细化程度较高, 现有的迭代学习模型预测控制理论仍面临着巨大挑战. 本文简要回顾了迭代学习模型预测控制理论的产生及发展, 阐述了二维预测模型、控制律迭代优化及二维稳定性等基本理论问题; 分析了现有方法在理论及应用方面的局限性, 说明了迭代学习模型预测控制在迭代建模、高效优化、变工况适应等方面面临的难点问题, 提出了可行的解决方案. 简要综述了近年来迭代学习模型预测控制理论和应用层面的发展动态, 指出了研究复杂非线性系统、快速系统、变工况系统对进一步完善其理论体系和拓宽其应用前景的意义, 展望了成品质量控制和动态经济控制等重要的未来研究方向.Abstract: After more than 20 years of development, iterative learning model predictive control (ILMPC) has made great progress in the aspects of theory and application. Since batch processes are featured by strong complexity, diversity, structural variety and high degree of refinement, the existing theories are still faced with great challenges. This paper reviews the generation and development of ILMPC, and expounds the basic theory of two-dimensional predictive model, iterative optimization of control law and two-dimensional stability; The limitations of existing methods are analysed from the perspectives of theory and application, and the issues on iterative modelling, efficient optimization and variable operation conditions are discussed in detail with available solutions provided. The new trends in the theory and application of ILMPC are comprehensively reviewed. The studies on complex nonlinear system, fast system and off-design system are clarified to make great significance for further perfecting ILMPC theory and broadening its application. The important future research directions consisting of end product quality control and dynamic economic control are outlined.
-

图 8 传统分层控制结构与ILEMPC结构对比
Fig. 8 Comparison of hierarchical control structure and ILEMPC structure
-
[1] Tomazi K G, Linninger A A, Daniel J R. Batch processing industries. Batch Processes. Boca Raton, FL: CRC Press, 2006. 7−39 [2] Myerson A S. Handbook of Industrial Crystallization. London, UK: Butterworths-Heinemann, 2001. [3] Tchobanoglous G, Burton F L, Stensel H D. Wastewater Engineering: Treatment and Reuse (4th edition). New York: McGraw-Hill, 2003. [4] Liu T, Gao F R. Industrial Process Identification and Control Design. London: Springer-Verlag, 2012. [5] McCormick K. Manufacturing in Global Pharmaceutical Industry. London: Urch, 2003. [6] Schmidt E, Winkelbauer J, Puchas G, Henrich D, Krenkel W. Robot-based fiber spray process for small batch production. Annals of Scientific Society for Assembly, Handling and Industrial Robotics. Berlin, Heidelberg: Springer Vieweg, 2020. 295−305 [7] Mazurek J, Ashford N A. Making Microchips: Policy, Globalization, and Economic Restructuring in the Semiconductor Industry. Cambridge, MA: MIT Press, 1998. [8] 卢静宜, 曹志兴, 高福荣. 批次过程控制: 回顾与展望. 自动化学报, 2017, 43(6): 933-943Lu Jing-Yi, Cao Zhi-Xing, Gao Fu-Rong. Batch process control--overview and outlook. Acta Automatica Sinica, 2017, 43(6): 933-943 [9] Yang Y, Gao F R. Injection velocity control using a self-tuning adaptive controller. International Polymer Processing, 1999, 14(2): 196-204 doi: 10.3139/217.1537 [10] Yang Y, Gao F R. Adaptive control of the filling velocity of thermoplastics injection molding. Control Engineering Practice, 2000, 8(11): 1285-1296 doi: 10.1016/S0967-0661(00)00060-5 [11] Nagy Z, Agachi S. Model predictive control of a PVC batch reactor. Computer & Chemical Engineering, 1997, 21(6): 571-591 [12] Nagy Z K, Braatz R D. Robust nonlinear model predictive control of batch processes. AIChE Journal, 2003, 49(7): 1776-1786 doi: 10.1002/aic.690490715 [13] Stenz R, Kuhn U. Automation of a batch distillation column using fuzzy and conventional control. IEEE Transactions on Control Systems Technology, 1995, 3(2): 171-176 doi: 10.1109/87.388125 [14] Frey C W, Kuntze H B. A neuro-fuzzy supervisory control system for industrial batch processes. IEEE Transactions on Fuzzy Systems, 2001, 9(4): 570-577 doi: 10.1109/91.940969 [15] Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robots by learning. Journal of Robotic Systems, 1984, 1(2): 123-140 doi: 10.1002/rob.4620010203 [16] Lee K S, Bang S H, Yi S, Son J S, Yoon S C. Iterative learning control of heat-up phase for a batch polymerization reactor. Journal of Process Control, 1996, 6(4): 255-262 doi: 10.1016/0959-1524(96)00048-0 [17] Lee J H, Lee K S. Iterative learning control applied to batch processes: An overview. Control Engineering Practice, 2007, 15(10): 1306-1318 doi: 10.1016/j.conengprac.2006.11.013 [18] Liu T, Gao F R. Robust two-dimensional iterative learning control for batch processes with state delay and time-varying uncertainties. Chemical Engineering Science, 2010, 65(23): 6134-6144 doi: 10.1016/j.ces.2010.08.031 [19] Gao F R, Yang Y, Shao C. Robust iterative learning control with applications to injection molding process. Chemical Engineering Science, 2001, 56(24): 7025-7034 doi: 10.1016/S0009-2509(01)00339-6 [20] Shi J, Gao F R, Wu T J. Robust iterative learning control design for batch processes with uncertain perturbations and initialization. AIChE Journal, 2006, 52(6): 2171-2187 doi: 10.1002/aic.10835 [21] Hao S L, Liu T, Paszke W, Galkowski K. Robust iterative learning control for batch processes with input delay subject to time-varying uncertainties. IET Control Theory & Applications, 2016, 10(15): 1904-1915 [22] Chi R H, Hou Z S, Xu J X. Adaptive ILC for a class of discrete-time systems with iteration-varying trajectory and random initial condition. Automatica, 2008, 44(8): 2207-2213 doi: 10.1016/j.automatica.2007.12.004 [23] Tayebi A. Adaptive iterative learning control for robot manipulators. Automatica, 2004, 40(7): 1195-1203 doi: 10.1016/j.automatica.2004.01.026 [24] Li X D, Xiao T F, Zheng H X. Adaptive discrete-time iterative learning control for non-linear multiple input multiple output systems with iteration-varying initial error and reference trajectory. IET Control Theory & Applications, 2011, 5(9): 1131-1139 [25] Chi R H, Hou Z S, Jin S T. A data-driven adaptive ILC for a class of nonlinear discrete-time systems with random initial states and iteration-varying target trajectory. Journal of the Franklin Institute, 2015, 352(6): 2407-2424 doi: 10.1016/j.jfranklin.2015.03.014 [26] Márquez-Vera M A, Ramos-Velasco L E, Suárez-Cansino J, Márquez-Vera C A. Fuzzy iterative learning control applied in a biological reactor using a reduced number of measures. Applied Mathematics and Computation, 2014, 246: 608-618 doi: 10.1016/j.amc.2014.08.072 [27] Jia L, Shi J P, Chiu M S. Integrated neuro-fuzzy model and dynamic R-parameter based quadratic criterion-iterative learning control for batch process. Neurocomputing, 2012, 98: 24-33 doi: 10.1016/j.neucom.2011.05.046 [28] Wang Y C, Chien C J, Teng C C. Direct adaptive iterative learning control of nonlinear systems using an output-recurrent fuzzy neural network. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2004, 34(3): 1348-1359 doi: 10.1109/TSMCB.2004.824525 [29] Xiong Z H, Zhang J. A batch-to-batch iterative optimal control strategy based on recurrent neural network models. Journal of Process Control, 2005, 15(1): 11-21 doi: 10.1016/j.jprocont.2004.04.005 [30] Li D W, He S Y, Xi Y G, Liu T, Gao F R, Wang Y Q, et al. Synthesis of ILC-MPC controller with data-driven approach for constrained batch processes. IEEE Transactions on Industrial Electronics, 2020, 67(4): 3116-3125 doi: 10.1109/TIE.2019.2910034 [31] Chi R H, Hou Z S, Jin S T, Huang B. An improved data-driven point-to-point ILC using additional on-line control inputs with experimental verification. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(4): 687-696 doi: 10.1109/TSMC.2017.2693397 [32] Wang Y Q, Liu T, Zhao Z. Advanced PI control with simple learning set-point design: Application on batch processes and robust stability analysis. Chemical Engineering Science, 2012, 71: 153-165 doi: 10.1016/j.ces.2011.12.028 [33] Liu T, Wang X Z, Chen J H. Robust PID based indirect-type iterative learning control for batch processes with time-varying uncertainties. Journal of Process Control, 2014, 24(12): 95-106 doi: 10.1016/j.jprocont.2014.07.002 [34] Shen C, Shi Y, Buckham B. Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5796-5805 doi: 10.1109/TIE.2017.2779442 [35] Yue M, An C, Li Z J. Constrained adaptive robust trajectory tracking for WIP vehicles using model predictive control and extended state observer. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(5): 733-742 doi: 10.1109/TSMC.2016.2621181 [36] Bone G M. A novel iterative learning control formulation of generalized predictive control. Automatica, 1995, 31(10): 1483-1487 doi: 10.1016/0005-1098(95)00051-W [37] Lee K S, Chin I S, Lee H J, Lee J H. Model predictive control technique combined with iterative learning for batch processes. AIChE Journal, 1999, 45(10): 2175-2187 doi: 10.1002/aic.690451016 [38] Lee K S, Lee J H. Convergence of constrained model-based predictive control for batch processes. IEEE Transactions on Automatic Control, 2000, 45(10): 1928-1932 doi: 10.1109/TAC.2000.881002 [39] Chin I, Qin S J, Lee K S, Cho M. A two-stage iterative learning control technique combined with real-time feedback for independent disturbance rejection. Automatica, 2004, 40(11): 1913-1922 doi: 10.1016/j.automatica.2004.05.011 [40] Xiong Z H, Zhang J, Wang X, Xu Y M. Tracking control for batch processes through integrating batch-to-batch iterative learning control and within-batch on-line control. Industrial & Engineering Chemistry Research, 2005, 44(11): 3983-3992 [41] Wang L M, Zhang R D, Gao F R. Iterative learning predictive control for batch processes. Iterative Learning Stabilization and Fault-Tolerant Control for Batch Processes. Singapore: Springer, 2020. 189−214 [42] Mo S Y, Wang L M, Yao Y, Gao F R. Two-time dimensional dynamic matrix control for batch processes with convergence analysis against the 2D interval uncertainty. Journal of Process Control, 2012, 22(5): 899-914 doi: 10.1016/j.jprocont.2012.03.002 [43] Shi J, Gao F R, Wu T J. Single-cycle and multi-cycle generalized 2D model predictive iterative learning control (2D-GPILC) schemes for batch processes. Journal of Process Control, 2007, 17(9): 715-727 doi: 10.1016/j.jprocont.2007.02.002 [44] Shi J, Zhou H, Cao Z K, Jiang Q Y. A design method for indirect iterative learning control based on two-dimensional generalized predictive control algorithm. Journal of Process Control, 2014, 24(10): 1527-1537 doi: 10.1016/j.jprocont.2014.07.004 [45] Shi J, Yang B, Cao Z K, Zhou H, Yang Y. Two-dimensional generalized predictive control (2D-GPC) scheme for the batch processes with two-dimensional (2D) dynamics. Multidimensional Systems and Signal Processing, 2015, 26(4): 941-966 doi: 10.1007/s11045-015-0336-5 [46] Liu X J, Kong X B. Nonlinear fuzzy model predictive iterative learning control for drum-type boiler-turbine system. Journal of Process Control, 2013, 23(8): 1023-1040 doi: 10.1016/j.jprocont.2013.06.004 [47] Wang Y Q, Zhou D H, Gao F R. Iterative learning model predictive control for multi-phase batch processes. Journal of Process Control, 2008, 18(6): 543-557 doi: 10.1016/j.jprocont.2007.10.014 [48] Oh S K, Lee J M. Iterative learning model predictive control for constrained multivariable control of batch processes. Computers & Chemical Engineering, 2016, 93: 284-292 [49] Oh S K, Lee J M. Iterative learning control integrated with model predictive control for real-time disturbance rejection of batch processes. Journal of Chemical Engineering of Japan, 2017, 50(6): 415-421 doi: 10.1252/jcej.16we333 [50] Zhang R D, Gao F R. Two-dimensional iterative learning model predictive control for batch processes: A new state space model compensation approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 833-841 doi: 10.1109/TSMC.2018.2883754 [51] Oh S K, Park B J, Lee J M. Point-to-point iterative learning model predictive control. Automatica, 2018, 89: 135-143 doi: 10.1016/j.automatica.2017.11.010 [52] Li D W, Xi Y G, Lu J Y, Gao F R. Synthesis of real-time-feedback-based 2D iterative learning control-model predictive control for constrained batch processes with unknown input nonlinearity. Industrial & Engineering Chemistry Research, 2016, 55(51): 13074-13084 [53] Zhang R D, Xue A K, Wang J Z, Wang S Q, Ren Z Y. Neural network based iterative learning predictive control design for mechatronic systems with isolated nonlinearity. Journal of Process Control, 2009, 19(1): 68-74 doi: 10.1016/j.jprocont.2008.01.008 [54] Lu J Y, Cao Z X, Gao F R. Multipoint iterative learning model predictive control. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6230-6240 doi: 10.1109/TIE.2018.2873133 [55] Jia L, Han C, Chiu M S. Dynamic R-parameter based integrated model predictive iterative learning control for batch processes. Journal of Process Control, 2017, 49: 26-35 doi: 10.1016/j.jprocont.2016.11.003 [56] Ma L L, Liu X J, Kong X B, Lee K Y. Iterative learning model predictive control based on iterative data-driven modeling. IEEE Transactions on Neural Networks and Learning Systems, 2021, 32(8): 3377-3390 doi: 10.1109/TNNLS.2020.3016295 [57] Guo H Q, Liu C Z, Yong J W, Cheng X Q, Muhammad F. Model predictive iterative learning control for energy management of plug-In hybrid electric vehicle. IEEE Access, 2019, 7: 71323-71334 doi: 10.1109/ACCESS.2019.2919684 [58] Wu S, Jin Q B, Zhang R D, Zhang J F, Gao F R. Improved design of constrained model predictive tracking control for batch processes against unknown uncertainties. ISA Transactions, 2017, 69: 273-280 doi: 10.1016/j.isatra.2017.04.006 [59] Lu J Y, Cao Z X, Gao F R. Ellipsoid invariant set-based robust model predictive control for repetitive processes with constraints. IET Control Theory & Applications, 2016, 10(9): 1018-1026 [60] Park B J, Oh S K, Lee J M. Stochastic iterative learning model predictive control based on stochastic approximation. IFAC-PapersOnLine, 2019, 52(1): 604-609 doi: 10.1016/j.ifacol.2019.06.129 [61] Long Y S, Xie L H. Iterative learning stochastic MPC with adaptive constraint tightening for building HVAC systems. IFAC-PapersOnLine, 2020, 53(2): 11577-11582 doi: 10.1016/j.ifacol.2020.12.636 [62] Lu J Y, Cao Z X, Wang Z, Gao F R. A two-stage design of two-dimensional model predictive iterative learning control for nonrepetitive disturbance attenuation. Industrial & Engineering Chemistry Research, 2015, 54(21): 5683-5689 [63] Lee J H, Lee K S, Kim W C. Model-based iterative learning control with a quadratic criterion for time-varying linear systems. Automatica, 2000, 36(5): 641-657 doi: 10.1016/S0005-1098(99)00194-6 [64] Ahn H S, Chen Y Q, Moore K L. Iterative learning control: Brief survey and categorization. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37(6): 1099-1121 doi: 10.1109/TSMCC.2007.905759 [65] Michalska H, Mayne D Q. Robust receding horizon control of constrained nonlinear systems. IEEE Transactions on Automatic Control, 1993, 38(11): 1623-1633 doi: 10.1109/9.262032 [66] 陆宁云, 王福利, 高福荣, 王姝. 间歇过程的统计建模与在线监测. 自动化学报, 2006, 32(3): 400-410Lu Ning-Yun, Wang Fu-Li, Gao Fu-Rong, Wang Shu. Statistical modeling and online monitoring for batch processes. Acta Automatica Sinica, 2006, 32(3): 400-410 [67] 赵春晖, 王福利, 姚远, 高福荣. 基于时段的间歇过程统计建模、在线监测及质量预报. 自动化学报, 2010, 36(3): 366-374 doi: 10.3724/SP.J.1004.2010.00366Zhao Chun-Hui, Wang Fu-Li, Yao Yuan, Gao Fu-Rong. Phase-based statistical modeling, online monitoring and quality prediction for batch processes. Acta Automatica Sinica, 2010, 36(3): 366-374 doi: 10.3724/SP.J.1004.2010.00366 [68] Zhu J L, Wang Y Q, Zhou D H, Gao F R. Batch process modeling and monitoring with local outlier factor. IEEE Transactions on Control Systems Technology, 2019, 27(4): 1552-1565 doi: 10.1109/TCST.2018.2815545 [69] 孙明轩, 黄宝健. 迭代学习控制. 北京: 国防工业出版社, 1999.Sun Ming-Xuan, Huang Bao-Jian. Iterative Learning Control. Beijing: National Defense Industry Press, 1999. [70] 池荣虎, 侯忠生, 黄彪. 间歇过程最优迭代学习控制的发展: 从基于模型到数据驱动. 自动化学报, 2017, 43(6): 917-932Chi Rong-Hu, Hou Zhong-Sheng, Huang Biao. Optimal iterative learning control of batch processes: From model-based to data-driven. Acta Automatica Sinica, 2017, 43(6): 917-932 [71] 席裕庚. 预测控制. 北京: 国防工业出版社, 1993.Xi Yu-Geng. Predictive Control. Beijing: National Defense Industry Press, 1993. [72] 陈虹. 模型预测控制. 北京: 科学出版社, 2013.Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. [73] Yu Q X, Hou Z S, Bu X H, Yu Q F. RBFNN-based data-driven predictive iterative learning control for nonaffine nonlinear systems. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(4): 1170-1182 doi: 10.1109/TNNLS.2019.2919441 [74] Anand E, Panneerselvam R. A study of crossover operators for genetic algorithm and proposal of a new crossover operator to solve open shop scheduling problem. American Journal of Industrial & Business Management, 2016, 6(6): 774-789 [75] Kordestani J K, Rezvanian A, Meybodi M R. An efficient oscillating inertia weight of particle swarm optimisation for tracking optima in dynamic environments. Journal of Experimental & Theoretical Artificial Intelligence, 2016, 28(1-2): 137-149 [76] Pang C Y, Hu W, Li X, Hu B Q. Apply local clustering method to improve the running speed of ant colony optimization. arXiv preprint arXiv: 0907.1012v2, 2009. [77] Chuang L Y, Hsiao C J, Yang C H. Chaotic particle swarm optimization for data clustering. Expert Systems with Applications, 2011, 38(12): 14555-14563 doi: 10.1016/j.eswa.2011.05.027 [78] Hu X Q, Beratan D N, Yang W T. A gradient-directed Monte Carlo approach to molecular design. The Journal of Chemical Physics, 2008, 129(6): Article No. 064102 [79] Gorski J, Pfeuffer F, Klamroth K. Biconvex sets and optimization with biconvex functions: A survey and extensions. Mathematical Methods of Operations Research, 2007, 66(3): 373-407 doi: 10.1007/s00186-007-0161-1 [80] Xu J X, Yan R. On initial conditions in iterative learning control. IEEE Transactions on Automatic Control, 2005, 50(9): 1349-1354 doi: 10.1109/TAC.2005.854613 [81] Park K H. An average operator-based PD-type iterative learning control for variable initial state error. IEEE Transactions on Automatic Control, 2005, 50(6): 865-869 doi: 10.1109/TAC.2005.849249 [82] Sun M X, Wang D W. Initial condition issues on iterative learning control for non-linear systems with time delay. International Journal of Systems Science, 2001, 32(11): 1365-1375 doi: 10.1080/00207720110052021 [83] Fang Y, Chow T W S. 2-D analysis for iterative learning controller for discrete-time systems with variable initial conditions. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 2003, 50(5): 722-727 doi: 10.1109/TCSI.2003.811029 [84] Meng D Y, Jia Y M, Du J P, Yuan S Y. Robust discrete-time iterative learning control for nonlinear systems with varying initial state shifts. IEEE Transactions on Automatic Control, 2009, 54(11): 2626-2631 doi: 10.1109/TAC.2009.2031564 [85] Chi R H, Hou Z S, Jin S T. Data-weighting based discrete-time adaptive iterative learning control for nonsector nonlinear systems with iteration-varying trajectory and random initial condition. Journal of Dynamic Systems, Measurement, and Control, 2012, 134(2): Article No. 021016 [86] Oh S K, Lee J M. Stochastic iterative learning control for discrete linear time-invariant system with batch-varying reference trajectories. Journal of Process Control, 2015, 36: 64-78 doi: 10.1016/j.jprocont.2015.09.008 [87] Xiao T F, Li X D, Ho J K L. An adaptive discrete-time ILC strategy using fuzzy systems for iteration-varying reference trajectory tracking. International Journal of Control, Automation & Systems, 2015, 13(1): 222-230 [88] Li X F, Xu J X, Huang D Q. An iterative learning control approach for linear systems with randomly varying trial lengths. IEEE Transactions on Automatic Control, 2014, 59(7): 1954-1960 doi: 10.1109/TAC.2013.2294827 [89] Li X F, Xu J X, Huang D Q. Iterative learning control for nonlinear dynamic systems with randomly varying trial lengths. International Journal of Adaptive Control & Signal Processing, 2015, 29(11): 1341-1353 [90] Shi J T, He X, Zhou D H. Iterative learning control for nonlinear stochastic systems with variable pass length. Journal of the Franklin Institute, 2016, 353(15): 4016-4038 doi: 10.1016/j.jfranklin.2016.07.005 [91] Liu S D, Wang J R. Fractional order iterative learning control with randomly varying trial lengths. Journal of the Franklin Institute, 2017, 354(2): 967-992 doi: 10.1016/j.jfranklin.2016.11.004 [92] Shen D, Zhang W, Wang Y Q, Chien C J. On almost sure and mean square convergence of P-type ILC under randomly varying iteration lengths. Automatica, 2016, 63: 359-365 doi: 10.1016/j.automatica.2015.10.050 [93] Shen D, Zhang W, Xu J X. Iterative learning control for discrete nonlinear systems with randomly iteration varying lengths. Systems & Control Letters, 2016, 96: 81-87 [94] Wei Y S, Li X D. Robust higher-order ILC for non-linear discrete-time systems with varying trail lengths and random initial state shifts. IET Control Theory & Applications, 2017, 11(15): 2440-2447 [95] Meng D Y, Zhang J Y. Deterministic convergence for learning control systems over iteration-dependent tracking intervals. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(8): 3885-3892 doi: 10.1109/TNNLS.2017.2734843 [96] Zeng C, Shen D, Wang J R. Adaptive learning tracking for uncertain systems with partial structure information and varying trial lengths. Journal of the Franklin Institute, 2018, 355(15): 7027-7055 doi: 10.1016/j.jfranklin.2018.07.031 [97] Shen D, Xu J X. Adaptive learning control for nonlinear systems with randomly varying iteration lengths. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(4): 1119-1132 doi: 10.1109/TNNLS.2018.2861216 [98] Yu Q X, Hou Z S. Adaptive fuzzy iterative learning control for high-speed trains with both randomly varying operation lengths and system constraints. IEEE Transactions on Fuzzy Systems, 2021, 29(8): 2408-2418 doi: 10.1109/TFUZZ.2020.2999958 [99] Jin X. Iterative learning control for MIMO nonlinear systems with iteration-varying trial lengths using modified composite energy function analysis. IEEE Transactions on Cybernetics, 2021, 51(12): 6080-6090 doi: 10.1109/TCYB.2020.2966625 [100] Yin C K, Xu J X, Hou Z S. A high-order internal model based iterative learning control scheme for nonlinear systems with time-iteration-varying parameters. IEEE Transactions on Automatic Control, 2010, 55(11): 2665-2670 doi: 10.1109/TAC.2010.2069372 [101] Yin C K, Xu J X, Hou Z S. An ILC scheme for a class of nonlinear continuous-time systems with time-iteration-varying parameters subject to second-order internal model. Asian Journal of Control, 2011, 13(1): 126-135 doi: 10.1002/asjc.320 [102] Yu M, Li C Y. Robust adaptive iterative learning control for discrete-time nonlinear systems with time-iteration-varying parameters. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1737-1745 doi: 10.1109/TSMC.2017.2677959 [103] Yu M, Chai S. Adaptive iterative learning control for discrete-time nonlinear systems with multiple iteration-varying high-order internal models. International Journal of Robust and Nonlinear Control, 2021, 31(15): 7390-7408 doi: 10.1002/rnc.5690 [104] Meng D Y, Moore K L. Robust iterative learning control for nonrepetitive uncertain systems. IEEE Transactions on Automatic Control, 2017, 62(2): 907-913 doi: 10.1109/TAC.2016.2560961 [105] Meng D Y, Moore K L. Convergence of iterative learning control for SISO nonrepetitive systems subject to iteration-dependent uncertainties. Automatica, 2017, 79: 167-177 doi: 10.1016/j.automatica.2017.02.009 [106] Meng D Y. Convergence conditions for solving robust iterative learning control problems under nonrepetitive model uncertainties. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(6): 1908-1919 doi: 10.1109/TNNLS.2018.2874977 [107] Altin B, Willems J, Oomen T, Barton K. Iterative learning control of iteration-varying systems via robust update laws with experimental implementation. Control Engineering Practice, 2017, 62: 36-45 doi: 10.1016/j.conengprac.2017.02.005 [108] Hao S L, Liu T, Rogers E. Extended state observer based indirect-type ILC for single-input single-output batch processes with time- and batch-varying uncertainties. Automatica, 2020, 112: Article No. 108673 doi: 10.1016/j.automatica.2019.108673 [109] Jin S T, Hou Z S, Chi R H. A novel data-driven terminal iterative learning control with iteration prediction algorithm for a class of discrete-time nonlinear systems. Journal of Applied Mathematics, 2014, 2014: Article No. 307809 [110] Yu Q X, Hou Z S. Data-driven predictive iterative learning control for a class of multiple-input and multiple-output nonlinear systems. Transactions of the Institute of Measurement and Control, 2016, 38(3): 266-281 doi: 10.1177/0142331215592692 [111] Bigras P, Lambert M, Perron C. Robust force controller for industrial robots: Optimal design and real-time implementation on a KUKA robot. IEEE Transactions on Control Systems Technology, 2012, 20(2): 473-479 doi: 10.1109/TCST.2011.2112661 [112] Hwang C L, Hung J Y. Stratified adaptive finite-time tracking control for nonlinear uncertain generalized vehicle systems and its application. IEEE Transactions on Control Systems Technology, 2019, 27(3): 1308-1316 doi: 10.1109/TCST.2018.2810851 [113] Sahu J N, Gangadharan P, Patwardhan A V, Meikap B C. Catalytic hydrolysis of urea with fly ash for generation of ammonia in a batch reactor for flue gas conditioning and NOx reduction. Industrial & Engineering Chemistry Research, 2009, 48(2): 727-734 [114] Zhou L M, Jia L, Wang Y L. Quadratic-criterion-based model predictive iterative learning control for batch processes using just-in-time-learning method. IEEE Access, 2019, 7: 113335-113344 doi: 10.1109/ACCESS.2019.2934474 [115] Liu X J, Ma L L, Kong X B, Lee K Y. An efficient iterative learning predictive functional control for nonlinear batch processes. IEEE Transactions on Cybernetics, DOI: 10.1109/TCYB.2020.3021978 [116] 马乐乐, 刘向杰. 非线性快速批次过程高效迭代学习预测函数控制. 自动化学报, 2022, 48(2): 515-530Ma Le-Le, Liu Xiang-Jie. A high efficiency iterative learning predictive functional control for nonlinear fast batch processes. Acta Automatica Sinica, 2022, 48(2): 515-530 [117] Rosolia U, Ames A D. Iterative model predictive control for piecewise systems. IEEE Control Systems Letters, 2022, 6: 842-847 doi: 10.1109/LCSYS.2021.3086561 [118] Liang C, Zou Y, Cai C X. Robust predictive iterative learning control for linear time-varying systems. Asian Journal of Control, 2022, 24(1): 333-343 doi: 10.1002/asjc.2477 [119] Qiu W W, Xiong Z H, Zhang J, Hong Y D, Li W Z. Integrated predictive iterative learning control based on updating reference trajectory for point-to-point tracking. Journal of Process Control, 2020, 85: 41-51 doi: 10.1016/j.jprocont.2019.11.003 [120] Liu X J, Ma L L, Kong X B, Lee K Y. Robust model predictive iterative learning control for iteration-varying-reference batch processes. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4238-4250 doi: 10.1109/TSMC.2019.2931314 [121] 马乐乐, 刘向杰. 变参考轨迹下的鲁棒迭代学习模型预测控制. 自动化学报, 2019, 45(10): 1933-1945Ma Le-Le, Liu Xiang-Jie. Robust model predictive iterative learning control with iteration-varying reference trajectory. Acta Automatica Sinica, 2019, 45(10): 1933-1945 [122] Lin N, Chi R H, Huang B. Auxiliary predictive compensation-based ILC for variable pass lengths. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(7): 4048-4056 doi: 10.1109/TSMC.2019.2930670 [123] Yang B, Xu Z H, Yang Y, Gao F R. Application of two-dimensional predictive functional control in injection molding. Industrial & Engineering Chemistry Research, 2015, 54(41): 10088-10102 [124] 李茜, 夏伯锴. 注塑机注射速度的模型预测迭代学习控制. 控制工程, 2009, 16(4): 429-431 doi: 10.3969/j.issn.1671-7848.2009.04.014Li Qian, Xia Bo-Kai. Model prediction iterative learning control of ram velocity for injection molding machines. Control Engineering of China, 2009, 16(4): 429-431 doi: 10.3969/j.issn.1671-7848.2009.04.014 [125] Balaji S, Fuxman A, Lakshminarayanan S, Forbes J F, Hayes R E. Repetitive model predictive control of a reverse flow reactor. Chemical Engineering Science, 2007, 62(8): 2154-2167 doi: 10.1016/j.ces.2006.12.082 [126] Marquez-Ruiz A, Loonen M, Saltik M B, Özkan L. Model learning predictive control for batch processes: A reactive batch distillation column case study. Industrial & Engineering Chemistry Research, 2019, 58(30): 13737-13749 [127] Bo C M, Yang L, Huang Q Q, Li J, Gao F R. 2D multi-model general predictive iterative learning control for semi-batch reactor with multiple reactions. Journal of Central South University, 2017, 24(11): 2613-2623 doi: 10.1007/s11771-017-3675-6 [128] Lautenschlager B, Lichtenberg G. Data-driven iterative learning for model predictive control of heating systems. IFAC-PapersOnLine, 2016, 49(13): 175-180 doi: 10.1016/j.ifacol.2016.07.947 [129] Wang Y Q, Dassau E, Doyle F J. Closed-loop control of artificial pancreatic β-cell in type 1 diabetes mellitus using model predictive iterative learning control. IEEE Transactions on Biomedical Engineering, 2010, 57(2): 211-219 doi: 10.1109/TBME.2009.2024409 [130] Wang Y Q, Zisser H, Dassau E, Jovanovič L, Doyle F J III. Model predictive control with learning-type set-point: Application to artificial pancreatic β-cell. AIChE Journal, 2010, 56(6): 1510-1518 doi: 10.1002/aic.12081 [131] 杨跃男, 王友清. 内模强化学习型模型预测控制及其在人工胰脏上的应用. 控制理论与应用, 2012, 29(8): 1057-1062Yang Yue-Nan, Wang You-Qing. Internal model control-enhanced learning-type model predictive control: Application to artificial pancreas. Control Theory & Applications, 2012, 29(8): 1057-1062 [132] Xie S W, Ren J. High-speed AFM imaging via iterative learning-based model predictive control. Mechatronics, 2019, 57: 86-94 doi: 10.1016/j.mechatronics.2018.11.008 [133] Chin I S, Lee K S, Lee J H. A technique for integrated quality control, profile control, and constraint handling for batch processes. Industrial & Engineering Chemistry Research, 2000, 39(3): 693-705 [134] Lee K S, Lee J H. A generic framework for integrated quality and profile control for industrial batch processes. IFAC Proceedings Volumes, 2001, 34(25): 53-63 doi: 10.1016/S1474-6670(17)33801-6 [135] Lee K S, Lee J H. Iterative learning control-based batch process control technique for integrated control of end product properties and transient profiles of process variables. Journal of Process Control, 2003, 13(7): 607-621 doi: 10.1016/S0959-1524(02)00096-3 [136] Dong C C, Chin I, Lee K S, Rho H, Rhee H, Lee J H. Integrated quality and tracking control of a batch PMMA reactor using a QBMPC technique. Computers & Chemical Engineering, 2000, 24(2-7): 953-958 [137] 柴天佑, 复杂工业过程运行优化与反馈控制. 自动化学报, 2013, 39(11): 1744-1757 doi: 10.3724/SP.J.1004.2013.01744Chai Tian-You. Operational optimization and feedback control for complex industrial processes. Acta Automatica Sinica, 2013, 39(11): 1744-1757 doi: 10.3724/SP.J.1004.2013.01744 [138] Chai T Y, Qin S J, Wang H. Optimal operational control for complex industrial processes. Annual Reviews in Control, 2014, 38(1): 81-92 doi: 10.1016/j.arcontrol.2014.03.005 [139] Scattolini R. Architectures for distributed and hierarchical Model Predictive Control--a review. Journal of Process Control, 2009, 19(5): 723-731 doi: 10.1016/j.jprocont.2009.02.003 [140] 邹涛, 潘昊, 丁宝苍, 于海斌. 双层结构预测控制研究进展. 控制理论与应用, 2014, 31(10): 1327-1337 doi: 10.7641/CTA.2014.31295Zou Tao, Pan Hao, Ding Bao-Cang, Yu Hai-Bin. Research development of two-layered predictive control. Control Theory & Applications, 2014, 31(10): 1327-1337 doi: 10.7641/CTA.2014.31295 [141] Rawlings J B, Amrit R. Optimizing process economic performance using model predictive control. Nonlinear Model Predictive Control. Berlin Heidelberg: Springer, 2009. 119−138 [142] Diehl M, Amrit R, Rawlings J B. A Lyapunov function for economic optimizing model predictive control. IEEE Transactions on Automatic Control, 2011, 56(3): 703-707 doi: 10.1109/TAC.2010.2101291 [143] Ellis M, Durand H, Christofides P D. A tutorial review of economic model predictive control methods. Journal of Process Control, 2014, 24(8): 1156-1178 doi: 10.1016/j.jprocont.2014.03.010 [144] Cai X, Sun P, Chen J H, Xie L. ILC strategy for progress improvement of economic performance in industrial model predictive control systems. Journal of Process Control, 2014, 24(12): 107-118 doi: 10.1016/j.jprocont.2014.09.010 [145] Lu P C, Chen J H, Xie L. Iterative learning control (ILC)-based economic optimization for batch processes using helpful disturbance information. Industrial & Engineering Chemistry Research, 2018, 57(10): 3717-3731 [146] Lu P C, Chen J H, Xie L. Disturbance-based alternate feedback control scheme to enhance economic performance of batch processes. Industrial & Engineering Chemistry Research, 2019, 58(10): 4143-4153 [147] Long Y S, Xie L H, Liu S. Nontracking type iterative learning control based on economic model predictive control. International Journal of Robust and Nonlinear Control, 2020, 30(18): 8564-8582 doi: 10.1002/rnc.5261 [148] Morrison J, Nagamune R, Grebenyuk V. An iterative learning approach to economic model predictive control for an integrated solar thermal system. IFAC-PapersOnLine, 2020, 53(2): 12777-12782 doi: 10.1016/j.ifacol.2020.12.1930 [149] Heidarinejad M, Liu J F, Christofides P D. Economic model predictive control of nonlinear process systems using Lyapunov techniques. AIChE Journal, 2012, 58(3): 855-870 doi: 10.1002/aic.12672 -

 下载:
下载:





图(8) / 表(1)
计量
- 文章访问数: 3020
- HTML全文浏览量: 2046
- PDF下载量: 1292
- 被引次数: 0
