

-
摘要: 微型扑翼飞行器(Flapping wing micro aerial vehicle, FWMAV)因飞行效率高、质量轻、耗能低、机动性强等显著优点, 在飞行器研究和应用中占据重要地位. 目前, FWMAV姿态控制成为飞行器控制研究领域的研究热点. 针对FWMAV姿态控制问题, 基于平行智能理论框架提出了一种FWMAV抗扰动姿态控制器. 通过建立人工系统(Artificial systems, A)、计算实验(Computational experiments, C)、平行执行(Parallel execution, P)三个过程, 得到一个能够有效解决FWMAV姿态控制过程中扰动问题的控制器, 并通过理论分析和数值仿真证明了该控制器的有效性.Abstract: Flapping wing micro aerial vehicle (FWMAV) plays an important role in the research and application of aircraft, due to its significant advantages, such as high flight efficiency, low weight, low energy conservation, high flexibility and so on. Currently, the attitude trajectory tracking control of FWMAV has become a research hotspot in the field of aircraft control. To this end, an anti-disturbance controller based on parallel intelligence theory is proposed in this paper. Specifically, via the construction of artificial systems (A), computational experiments (C), and parallel execution (P), the proposed controller can effectively address the disturbance issue in FWMAV attitude tracking. Moreover, the effectiveness and feasibility of the proposed controller are proved by theoretical analyses and numerical simulations.
-
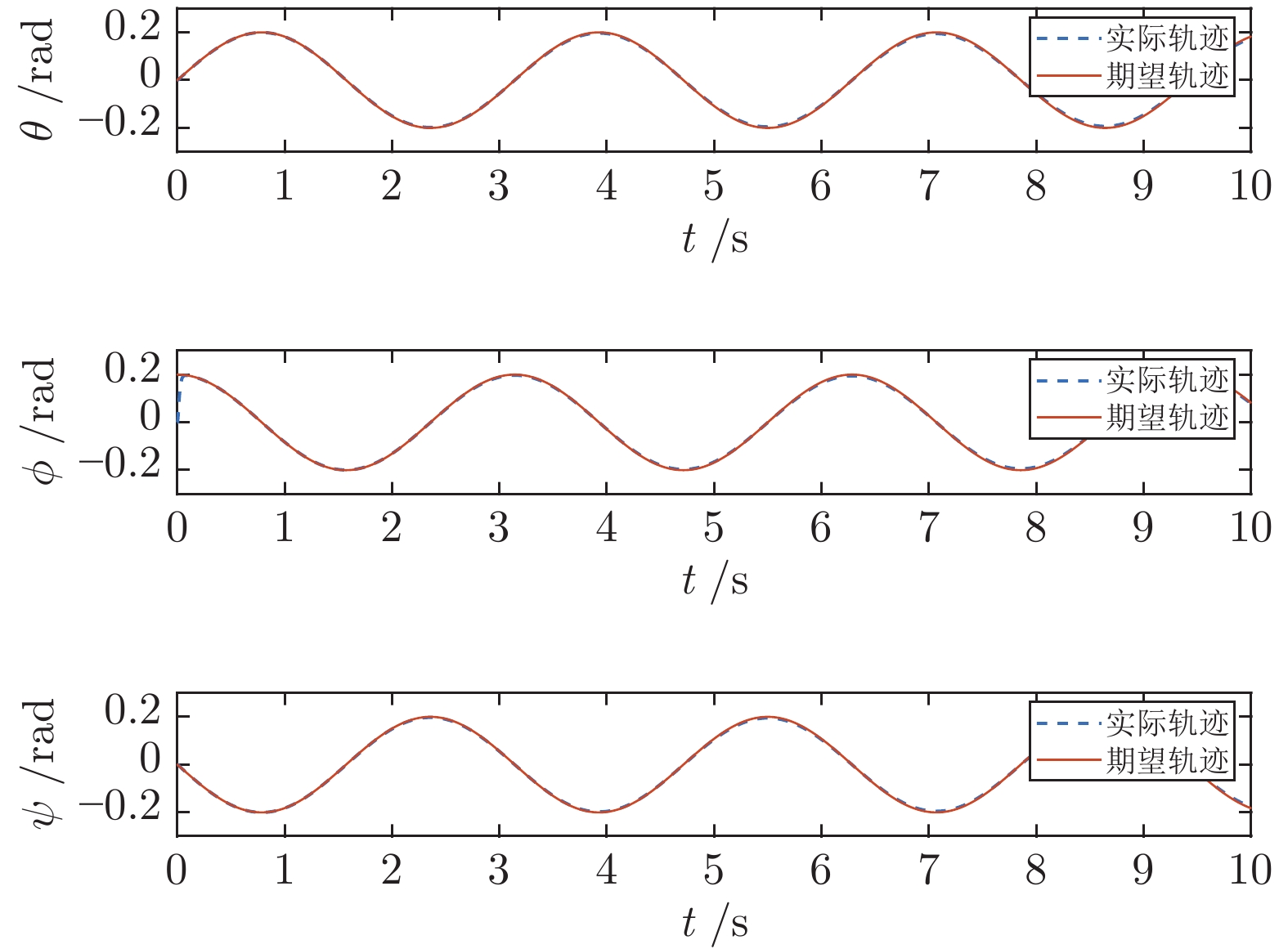
图 5 恒定扰动下抗扰动ND控制器姿态控制
Fig. 5 Attitude control of the anti-disturbance ND controller with constant disturbance
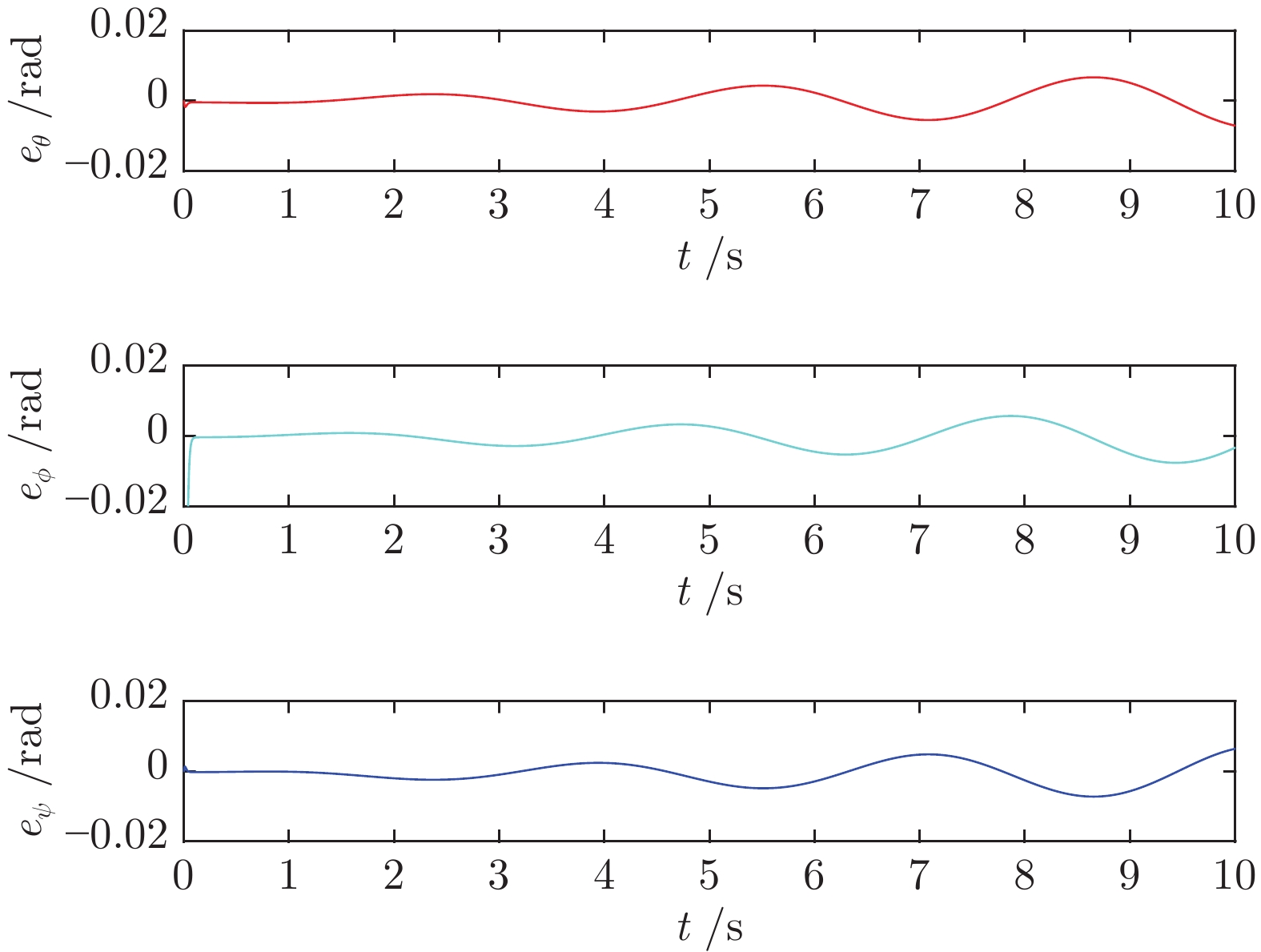
图 6 恒定扰动下抗扰动ND控制器姿态控制误差
Fig. 6 Attitude control error of the anti-disturbance ND controller with constant disturbance
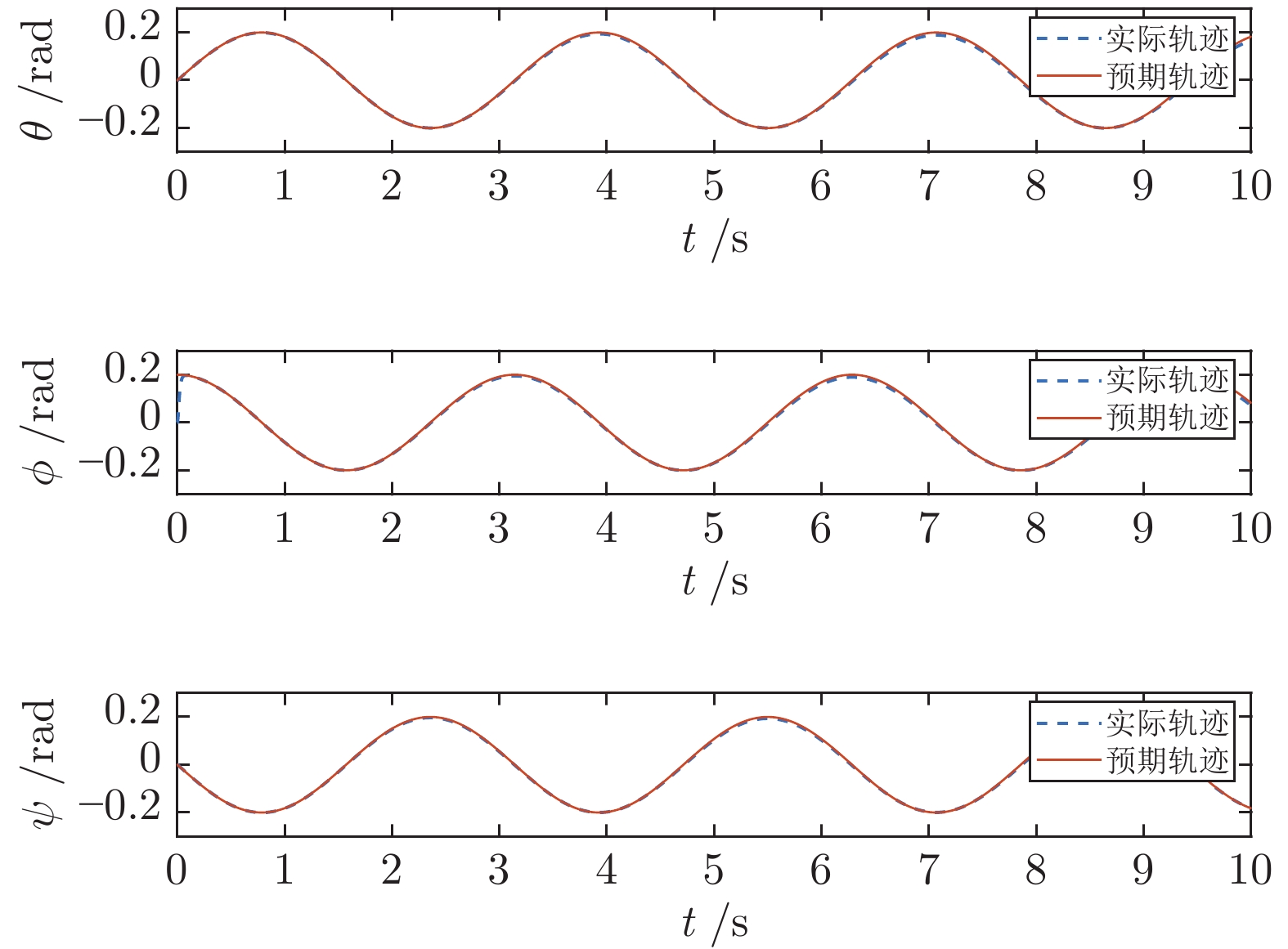
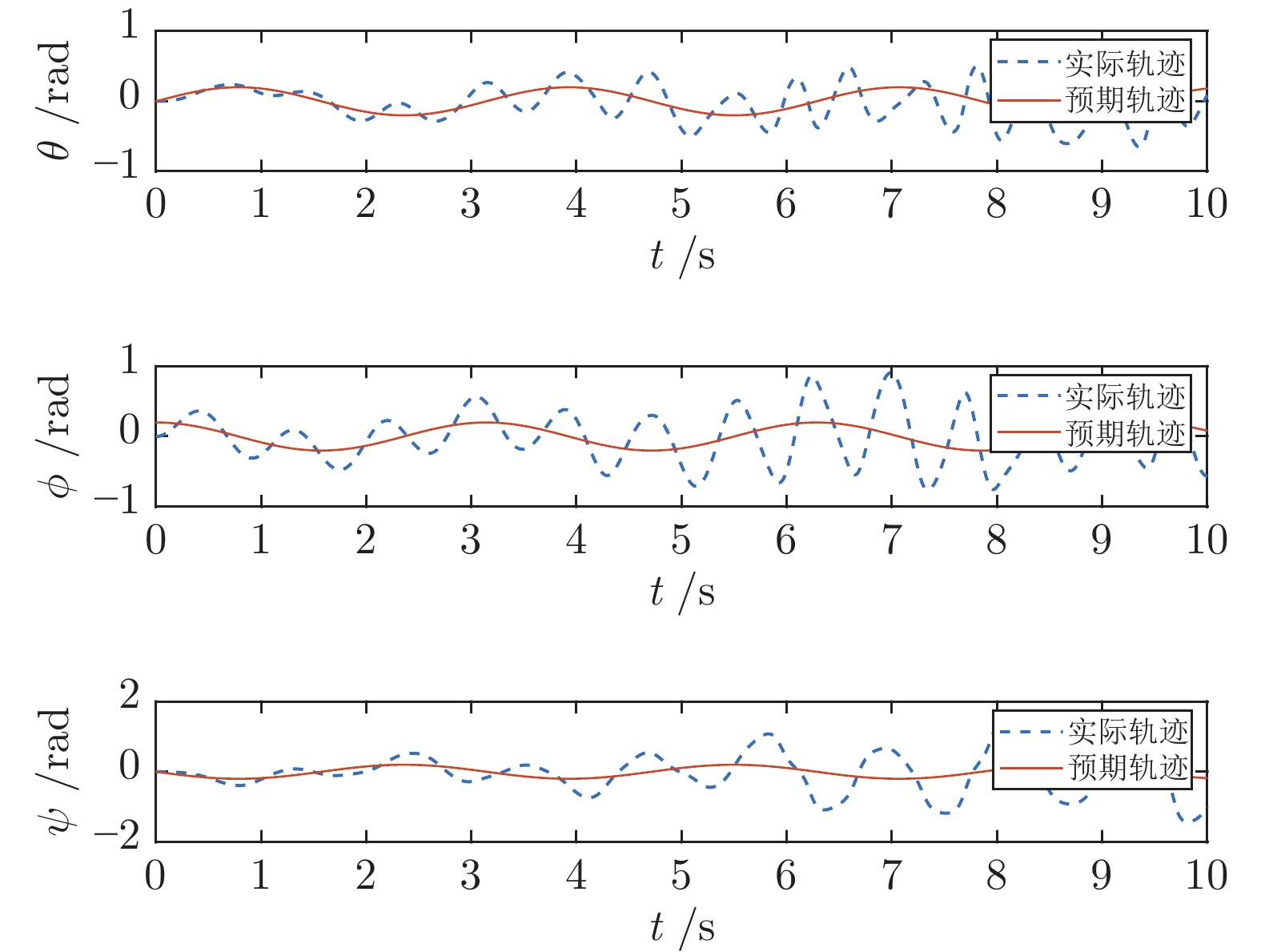
图 7 线性时变扰动下抗扰动ND控制器姿态控制
Fig. 7 Attitude control of the anti-disturbance ND controller with linear time-varying disturbance
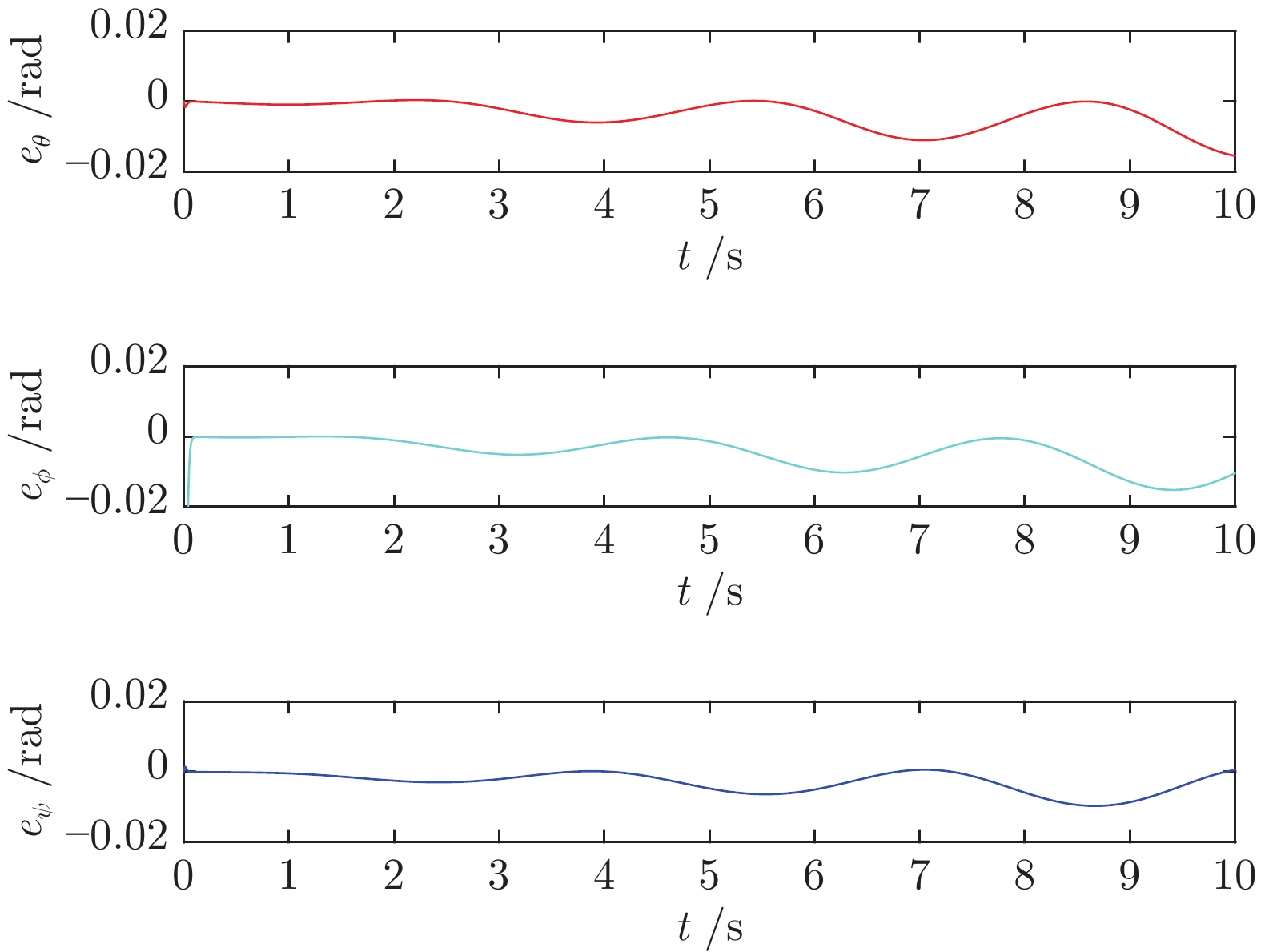
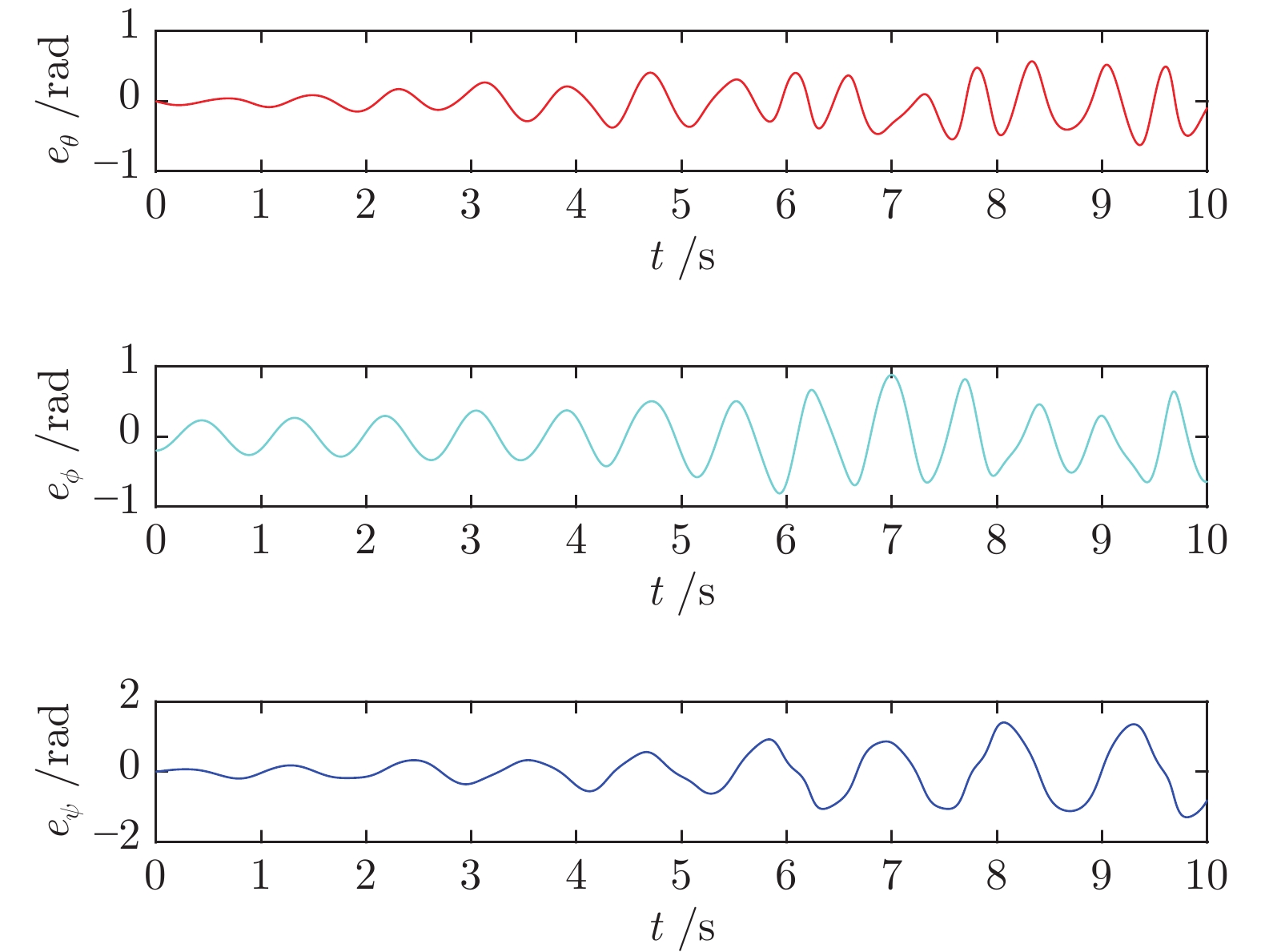
图 8 线性时变扰动下抗扰动ND控制器姿态控制误差
Fig. 8 Attitude control error of the anti-disturbance ND controller with linear time-varying disturbance
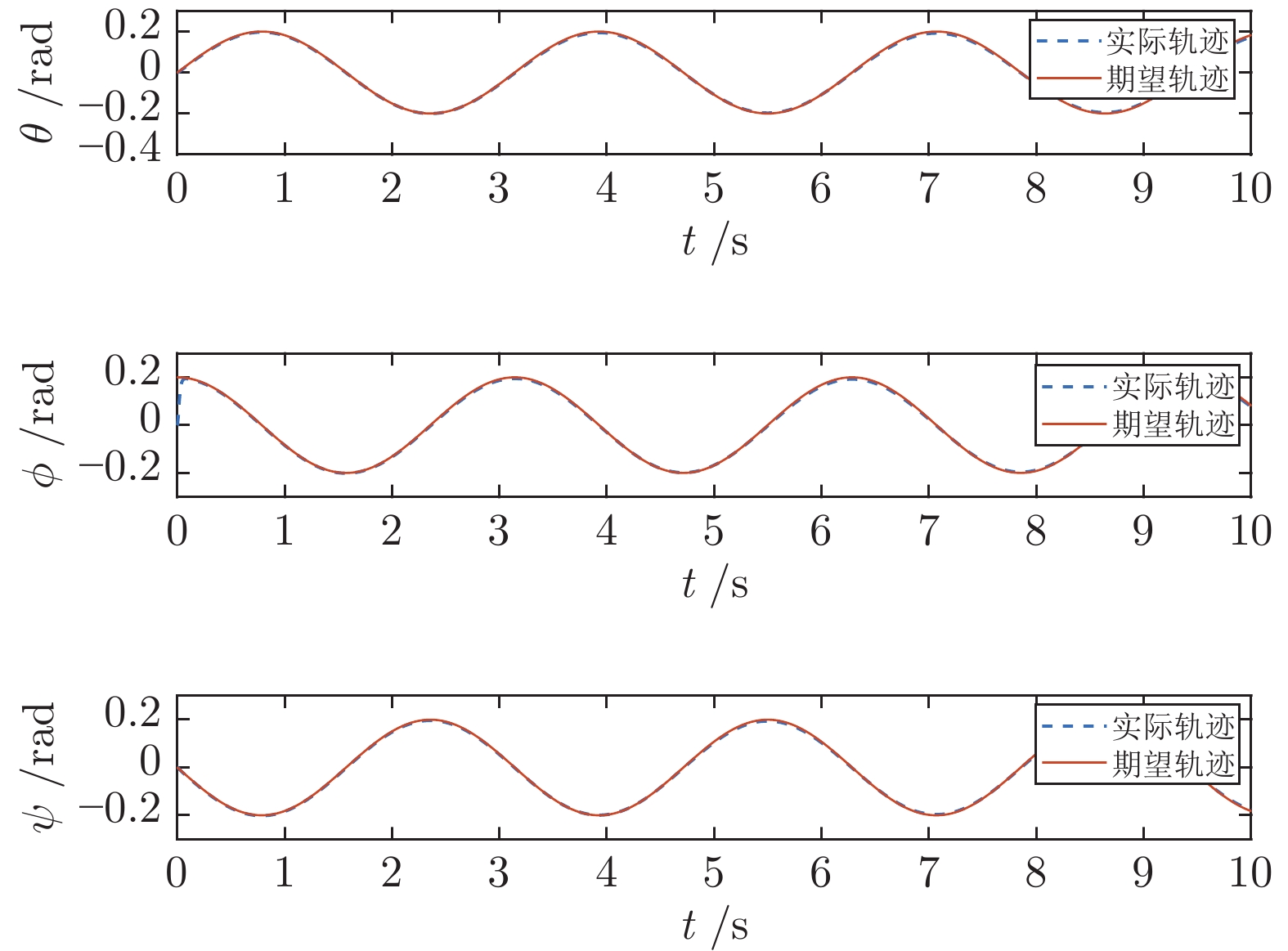
图 9 有界随机扰动下抗扰动ND控制器姿态控制
Fig. 9 Attitude control of the anti-disturbance ND controller with bounded random disturbance
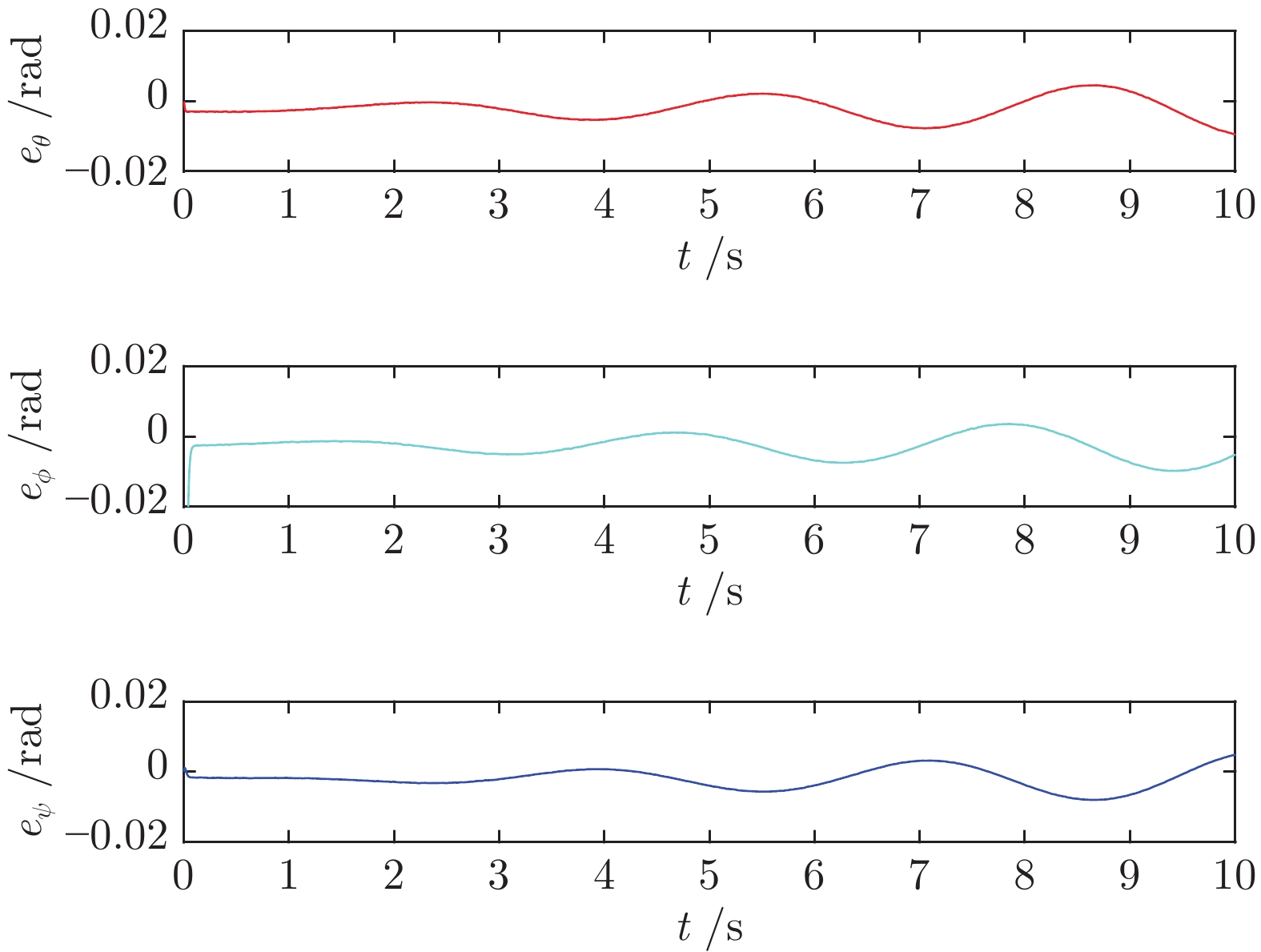
图 10 有界随机扰动下抗扰动ND控制器姿态控制误差
Fig. 10 Attitude control error of the anti-disturbance ND controller with bounded random disturbance
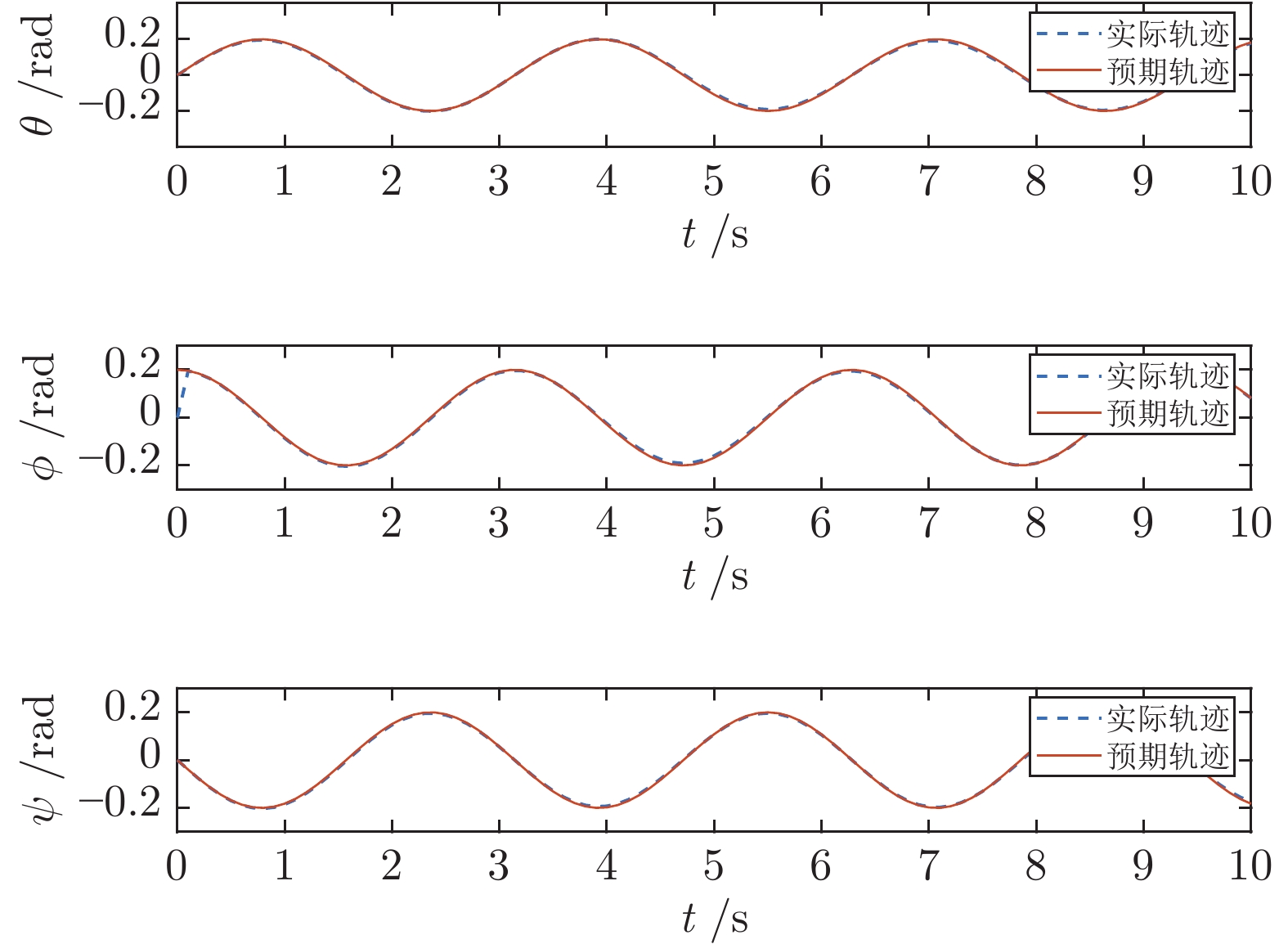
图 11 正弦扰动下抗扰动ND控制器姿态控制
Fig. 11 Attitude control of the anti-disturbance ND controller with sine disturbance
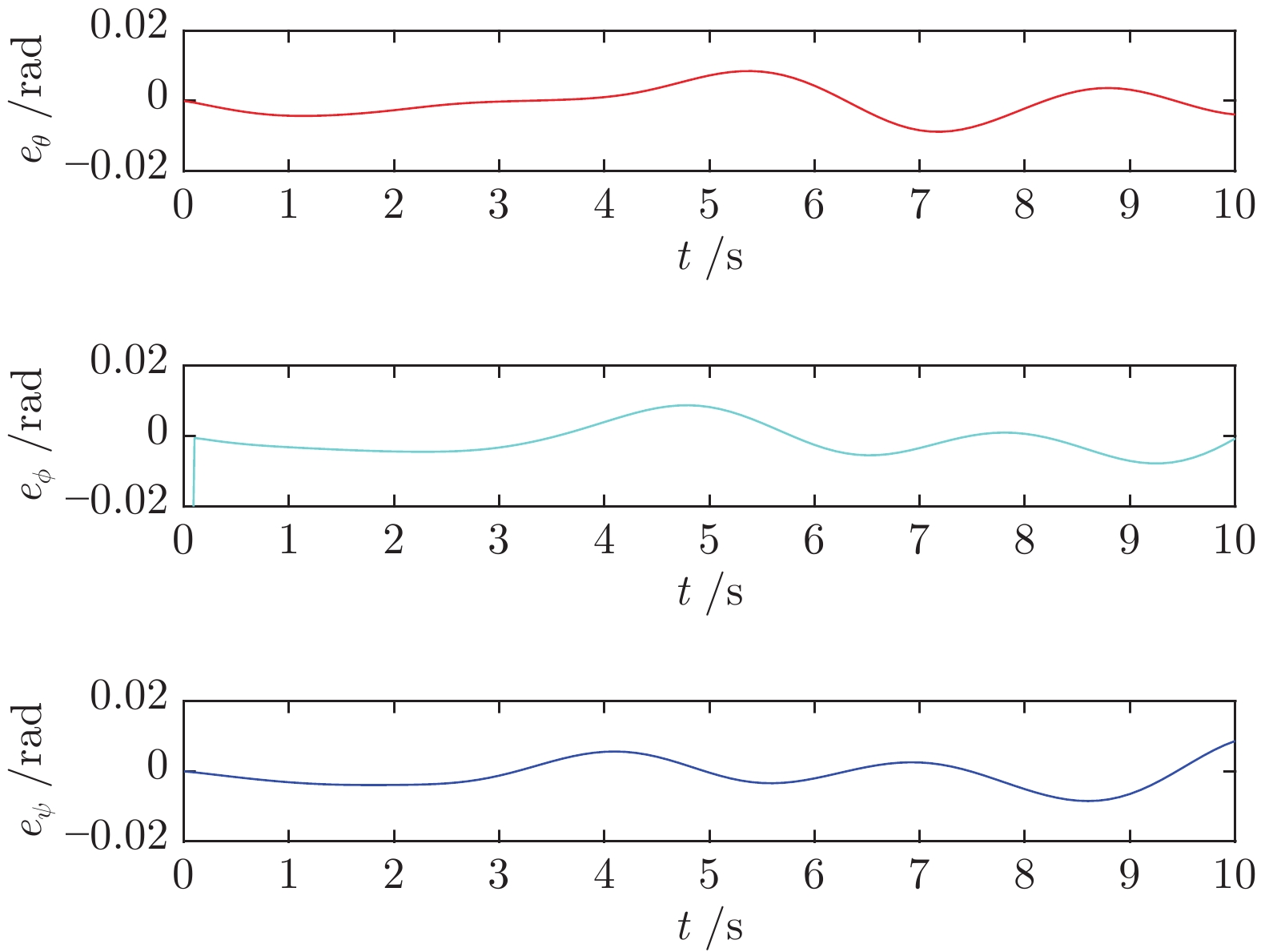
图 12 正弦扰动下抗扰动ND控制器姿态控制误差
Fig. 12 Attitude control error of the anti-disturbance ND controller with sine disturbance
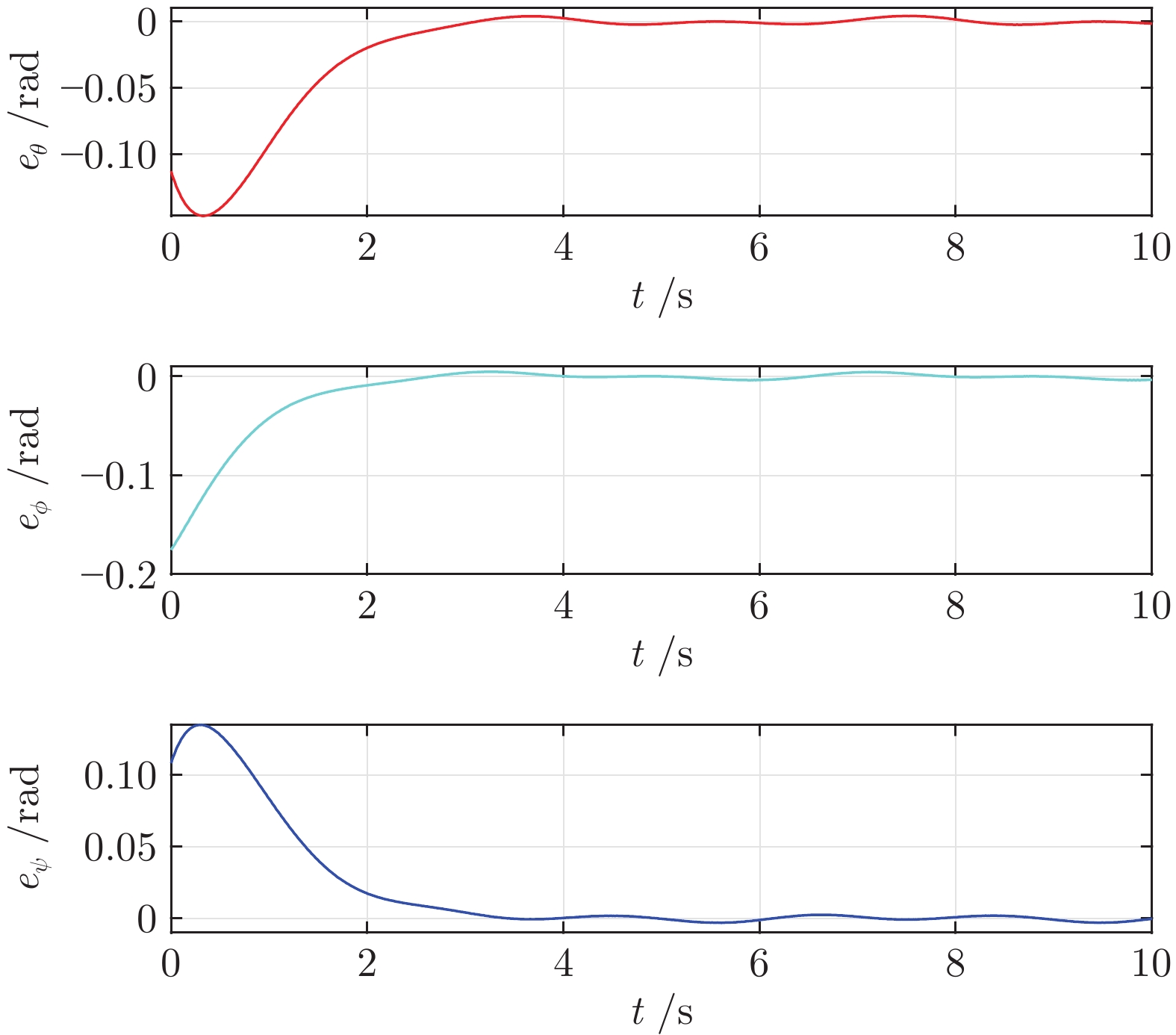
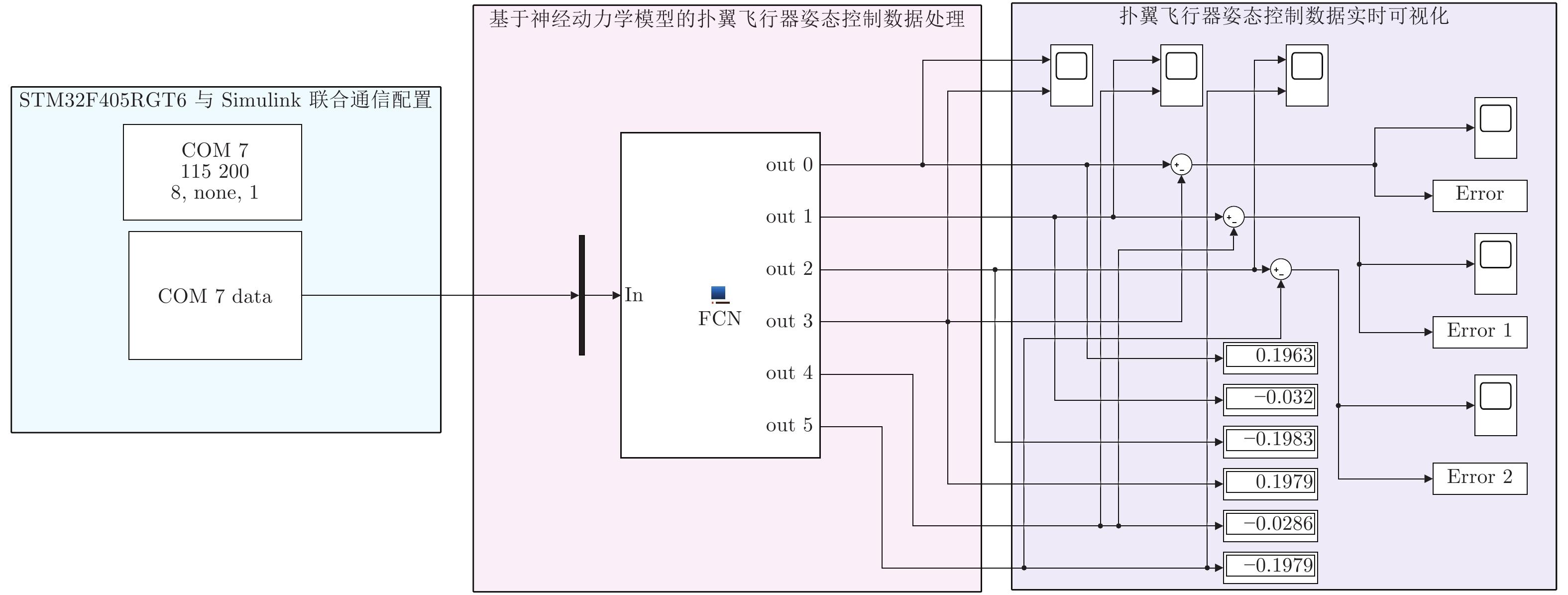
图 14 FWMAV ND姿态控制器硬件在环仿真误差曲线图
Fig. 14 HIL simulation error curve of FWMAV ND attitude controller
表 1 控制器性能比较
Table 1 Comparison of performance among different controllers
$e_\theta $ (rad) $e_\phi$ (rad) $e_ \psi$(rad) 平均值 标准差 平均值 标准差 平均值 标准差 参考文献[14]中的控制器 (81) −0.0288 0.2483 −0.0166 0.3890 −0.0241 0.6696 ND 抗扰动控制器 (恒定扰动) −0.0162 0.0040 −0.0192 0.0185 −0.0101 0.0019 ND 抗扰动控制器 (线性时变扰动) −0.0038 0.0040 −0.0065 0.0200 −0.0029 0.0029 ND 抗扰动控制器 (有界随机扰动) −0.0021 0.0032 −0.0048 0.0199 −0.0020 0.0028 ND 抗扰动控制器 (正弦扰动) −0.0004 0.0043 −0.0033 0.0202 −0.0010 0.0038  下载: 导出CSV
下载: 导出CSV
-
[1] Mackenzie D. A flapping of wings. Science, 2012, 335(6075): 1430−1433 doi: 10.1126/science.335.6075.1430 [2] Rege A A. Characterization of Flapping Wing Aerodynamics and Flight Dynamics Analysis Using Computational Methods [Ph.D. dissertation], The University of Texas, USA, 2015. [3] Dickinson M H, Lehmann F O, Sane S P. Wing rotation and the aerodynamic basis of insect flight. Science, 1999, 284(5422): 1954−1960 doi: 10.1126/science.284.5422.1954 [4] 周骥平, 武立新, 朱兴龙. 仿生扑翼飞行器的研究现状及关键技术. 机器人技术与应用, 2004, 4(6): 12−17) doi: 10.3969/j.issn.1004-6437.2004.06.004Zhou Ji-Ping, Wu Li-Xin, Zhu Xing-Long. The present research situation and key technology. Robort Techniqae and Application. 2004, 4(6): 12−17 doi: 10.3969/j.issn.1004-6437.2004.06.004 [5] Rose C, Fearing R S. Comparison of ornithopter wind tunnel force measurements with free flight. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014. 1816−1821 [6] Keennon M, Klingebiel K, Won H, Andriukov A. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In: Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. Nashville, USA: AIAA, 2012. 129−134 [7] Ma K Y, Chirarattananon P, Fuller S B, Wood R J. Controlled flight of a biologically inspired, insect-scale robot. Science, 2013, 340(6132): 603−607 doi: 10.1126/science.1231806 [8] Xuan J L, Song B F, Song W P, Yang W Q, Xue D, Liang S R. Progress of Chinese “Dove” and future studies on flight mechanism of birds and application system. Transactions of Nanjing University of Aeronautics & Astronautics, 2020, 37(5): 663−675 [9] 刘晶, 汪超, 谢鹏, 周超英. 基于PD控制的仿昆虫扑翼样机研制. 航空学报, 2020, 41(9): Article No. 223678Liu Jing, Wang Chao, Xie Peng, Zhou Chao-Ying. Development of insect-like flapping wing micro air vehicle based on PD control. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): Article No. 223678 [10] Li J X, Wang C, Liu J, Xie P, Zhou C Y. Design and implementation of hovering flapping wing micro air vehicle. In: Proceedings of the 12th International Conference on Intelligent Robotics and Applications. Shenyang, China: Springer, 2019. 226−233 [11] Masu K, Machida K, Yamane D, Ito H, Ishihara N, Chang T M, et al. (Invited) CMOS-MEMS based microgravity sensor and its application. ECS Transactions, 2020, 97(5): 91−108 doi: 10.1149/09705.0091ecst [12] 曹风魁, 庄严, 闫飞, 杨奇峰, 王伟. 移动机器人长期自主环境适应研究进展和展望. 自动化学报, 2020, 46(2): 205−221Cao Feng-Kui, Zhuang Yan, Yan Fei, Yang Qi-Feng, Wang Wei. Long-term autonomous environment adaptation of mobile robots: State-of-the-art methods and prospects. Acta Automatica Sinica, 2020, 46(2): 205−221 [13] Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping wing air vehicle. Nonlinear Dynamics, 2016, 85(1): 47−66 doi: 10.1007/s11071-016-2666-8 [14] He W, Yan Z C, Sun C Y, Chen Y. Adaptive neural network control of a flapping wing micro aerial vehicle with disturbance observer. IEEE Transactions on Cybernetics, 2017, 47(10): 3452−3465 doi: 10.1109/TCYB.2017.2720801 [15] He W, Mu X X, Zhang L, Zou Y. Modeling and trajectory tracking control for flapping-wing micro aerial vehicles. IEEE/CAA Journal of Automatica Sinica, 2021, 8(1): 148−156 doi: 10.1109/JAS.2020.1003417 [16] 贺威, 丁施强, 孙长银. 扑翼飞行器的建模与控制研究进展. 自动化学报, 2017, 43(5): 685−696He Wei, Ding Shi-Qiang, Sun Chang-Yin. Research progress on modeling and control of flapping-wing air vehicles. Acta Automatica Sinica, 2017, 43(5): 685−696 [17] Jha S K, Bhasin S. Adaptive linear quadratic regulator for continuous-time systems with uncertain dynamics. IEEE/CAA Journal of Automatica Sinica, 2020, 7(3): 833−841 doi: 10.1109/JAS.2019.1911438 [18] Yang X, Zhao B. Optimal neuro-control strategy for nonlinear systems with asymmetric input constraints. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 575−583 doi: 10.1109/JAS.2020.1003063 [19] Qi Y M, Jin L, Li H X, Li Y M, Liu M. Discrete computational neural dynamics models for solving time-dependent Sylvester equation with applications to robotics and MIMO systems. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6231−6241 doi: 10.1109/TII.2020.2966544 [20] Wei L, Jin L, Yang C G, Chen K, Li W B. New noise-tolerant neural algorithms for future dynamic nonlinear optimization with estimation on Hessian matrix inversion. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(4): 2611−2623 doi: 10.1109/TSMC.2019.2916892 [21] Jin L, Yan J K, Du X J, Xiao X C, Fu D Y. RNN for solving time-variant generalized Sylvester equation with applications to robots and acoustic source localization. IEEE Transactions on Industrial Informatics, 2020, 16(10): 6359−6369 doi: 10.1109/TII.2020.2964817 [22] Wang F Y, Zhang J J, Zheng X H, Wang X, Yuan Y, Dai X X, et al. Where does AlphaGo go: From Church-Turing thesis to AlphaGo thesis and beyond. IEEE/CAA Journal of Automatica Sinica, 2016, 3(2): 113−120 doi: 10.1109/JAS.2016.7471613 [23] 王飞跃. 平行控制: 数据驱动的计算控制方法. 自动化学报, 2013, 39(4): 293−302)Wang Fei-Yue. Parallel control: A method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293−302 [24] 王飞跃. 关于复杂系统的建模、分析、控制和管理. 复杂系统与复杂性科学, 2006, 3(2): 26−34 doi: 10.3969/j.issn.1672-3813.2006.02.004Wang Fei-Yue. On the modeling, analysis, control and management of complex systems. Complex Systems and Complexity Science, 2006, 3(2): 26−34 doi: 10.3969/j.issn.1672-3813.2006.02.004 [25] Wei Q L, Wang L X, Lu J W, Wang F Y. Discrete-time self-learning parallel control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(1): 192−204 doi: 10.1109/TSMC.2020.2995646 [26] 王飞跃. 平行系统方法与复杂系统的管理和控制. 控制与决策, 2004, 19(5): 485−489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5): 485−489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002 [27] 王坤峰, 苟超, 王飞跃. 平行视觉: 基于ACP的智能视觉计算方法. 自动化学报, 2016, 42(10): 1490−1500Wang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision: An ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10): 1490−1500 [28] 王晓, 要婷婷, 韩双双, 曹东璞, 王飞跃. 平行车联网: 基于ACP的智能车辆网联管理与控制. 自动化学报, 2018, 44(8): 1391−1404Wang Xiao, Yao Ting-Ting, Han Shuang-Shuang, Cao Dong-Pu, Wang Fei-Yue. Parallel internet of vehicles: The ACP-based networked management and control for intelligent vehicles. Acta Automatica Sinica, 2018, 44(8): 1391−1404 [29] 白天翔, 王帅, 沈震, 曹东璞, 郑南宁, 王飞跃. 平行机器人与平行无人系统: 框架、结构、过程、平台及其应用. 自动化学报, 2017, 43(2): 161−175Bai Tian-Xiang, Wang Shuai, Shen Zhen, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel robotics and parallel unmanned systems: Framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43(2): 161−175 [30] 王晓, 韩双双, 杨林瑶, 曾轲, 王飞跃. 基于ACP的动态网民群体运动组织建模与计算实验研究. 自动化学报, 2020, 46(4): 653−669Wang Xiao, Han Shuang-Shuang, Yang Lin-Yao, Zeng Ke, Wang Fei-Yue. The research on ACP-based modeling and computational experiment for cyber movement organizations. Acta Automatica Sinica, 2020, 46(4): 653−669 [31] 陈虹宇, 艾红, 王晓, 吕宜生, 陈圆圆, 王飞跃. 社会交通中的社会信号分析与感知. 自动化学报, 2021, 47(6): 1256−1272Chen Hong-Yu, Ai Hong, Wang Xiao, Lv Yi-Sheng, Chen Yuan-Yuan, Wang Fei-Yue. Analysis and perception of social signals in social transportation. Acta Automatica Sinica, 2021, 47(6): 1256−1272 [32] 王飞跃. 平行控制与数字孪生: 经典控制理论的回顾与重铸. 智能科学与技术学报, 2020, 2(3): 293−300Wang Fei-Yue. Parallel control and digital twins: Control theory revisited and reshaped. Chinese Journal of Intelligent Science and Technology, 2020, 2(3): 293−300 [33] Wei Q L, Li H Y, Wang F Y. Parallel control for continuous-time linear systems: A case study. IEEE/CAA Journal of Automatica Sinica, 2020, 7(4): 919−928 doi: 10.1109/JAS.2020.1003216 [34] Lu J W, Wei Q L, Wang F Y. Parallel control for optimal tracking via adaptive dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2020, 7(6): 1662−1674 doi: 10.1109/JAS.2020.1003426 [35] Han X M, Zhao X D, Sun T, Wu Y H, Xu N, Zong G D. Event-triggered optimal control for discrete-time switched nonlinear systems with constrained control input. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(12): 7850−7859 doi: 10.1109/TSMC.2020.2987136 [36] Shanmugam L, Joo Y H. Stability and Stabilization for T-S fuzzy large-scale interconnected power system with wind farm via sampled-data control. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(4): 2134−2144 doi: 10.1109/TSMC.2020.2965577 [37] 薄迎春, 张欣, 刘宝. 延迟深度回声状态网络及其在时间序列预测中的应用. 自动化学报, 2020, 46(8): 1644−1653Bo Ying-Chun, Zhang Xin, Liu Bao. Delayed deep echo state network and its application on time series prediction. Acta Automatica Sinica, 2020, 46(8): 1644−1653 [38] Principi E, Rossetti D, Squartini S, Piazza F. Unsupervised electric motor fault detection by using deep autoencoders. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 441−451 doi: 10.1109/JAS.2019.1911393 [39] Jin L, Ying L F, Lu H Y, Zhang Z J. Saturation-allowed neural dynamics applied to perturbed time-dependent system of linear equations and robots. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9844−9854 doi: 10.1109/TIE.2020.3029478 [40] 郑君里, 应启珩, 杨为理. 信号与系统. 第3版. 北京: 高等教育出版社, 2000.Zheng Jun-Li, Ying Qi-Heng, Yang Wei-Li. Signals and Systems (3rd edition). Beijing: Higher Education Press, 2000. [41] 邹祎. 硬件在环仿真系统概述. 价值工程, 2016, 35(35): 97−98Zou Yi. Overview of hardware-in-loop simulation System. Value Engineering, 2016, 35(35): 97−98 [42] Dai X H, Ke C X, Quan Q, Cai K Y. Simulation credibility assessment methodology with FPGA-based Hardware-in-the-Loop platform. IEEE Transactions on Industrial Electronics, 2021, 68(4): 3282−3291 doi: 10.1109/TIE.2020.2982122 -

 下载:
下载:


计量
- 文章访问数: 1994
- HTML全文浏览量: 769
- PDF下载量: 353
- 被引次数: 0
