

Adaptive Command Filtered Control of Strict Feedback Systems With Uncertain Control Gains
-
摘要: 针对一类具有不确定控制增益的严格反馈系统, 提出一种基于命令滤波反推技术的自适应神经网络控制方法. 该方法采用神经网络对系统中的未知非线性函数进行逼近, 并引入命令滤波反推技术克服“计算膨胀”的问题. 与现有的命令滤波反推控制文献相比, 本文通过构造自适应误差补偿系统, 同时消除滤波器产生的边界层误差和不确定控制增益对系统性能造成的影响. 仿真结果验证了所提控制方法的有效性.Abstract: In this paper, a command filtered-based adaptive neural control scheme is developed for strict feedback systems with uncertain control gains. In the developed scheme, neural networks are adopted to approximate the unknown nonlinear system functions and command filtered backstepping technique is utilized to solve the “explosion of complexity” problem. Compared with the literature on command filtered backstepping control, in this paper, an adaptive error compensating system is constructed to eliminate the impacts of the boundary layer errors generated by the filters and the uncertain control gains on system performance simultaneously. Simulation results are presented to verify the effectiveness of the proposed control scheme.
-
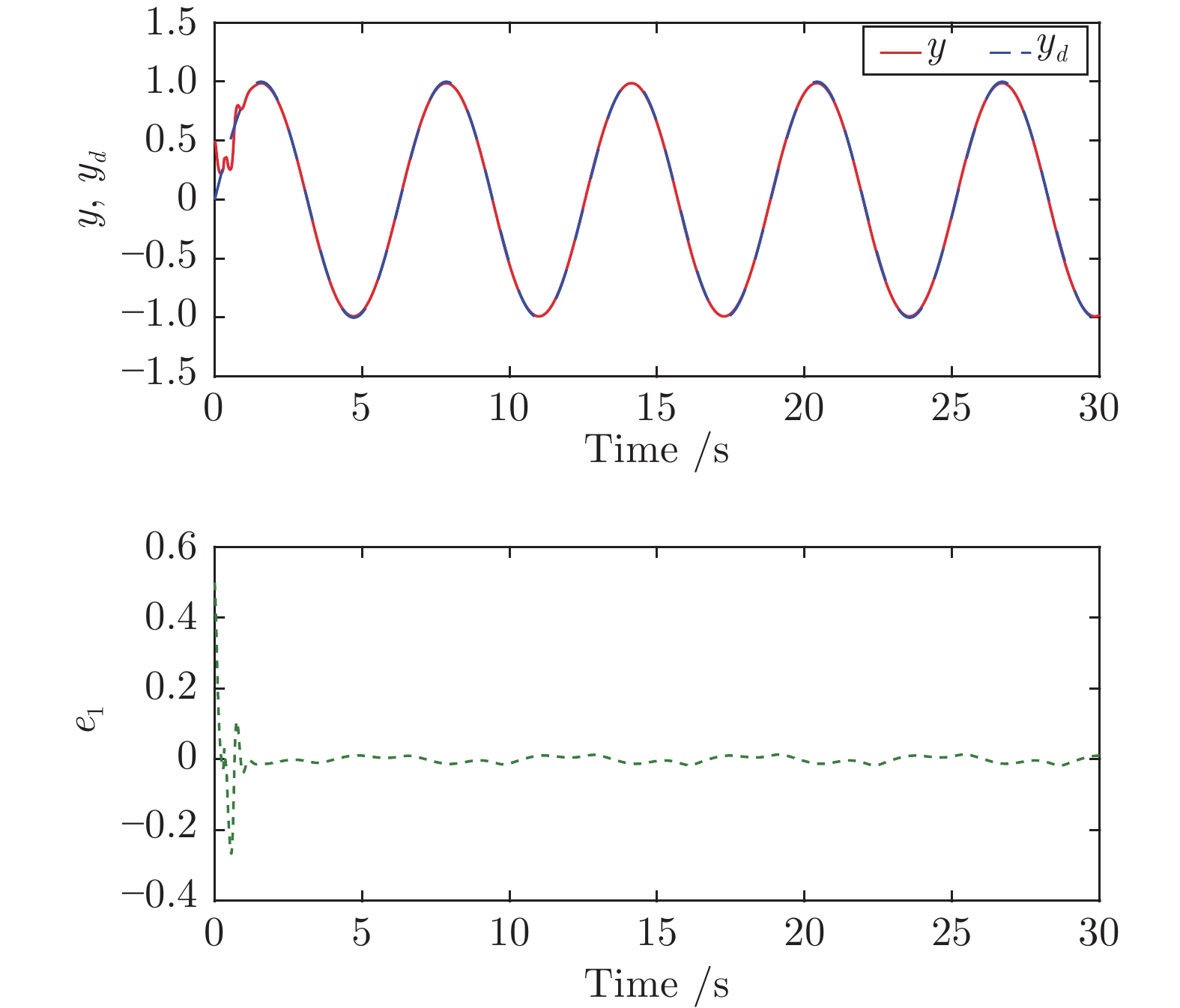
图 1 系统输出$y$, 期望轨迹$y_d$和跟踪误差$e_1$
Fig. 1 System output $y$, desired trajectory $y_d$ and tracking error $e_1$
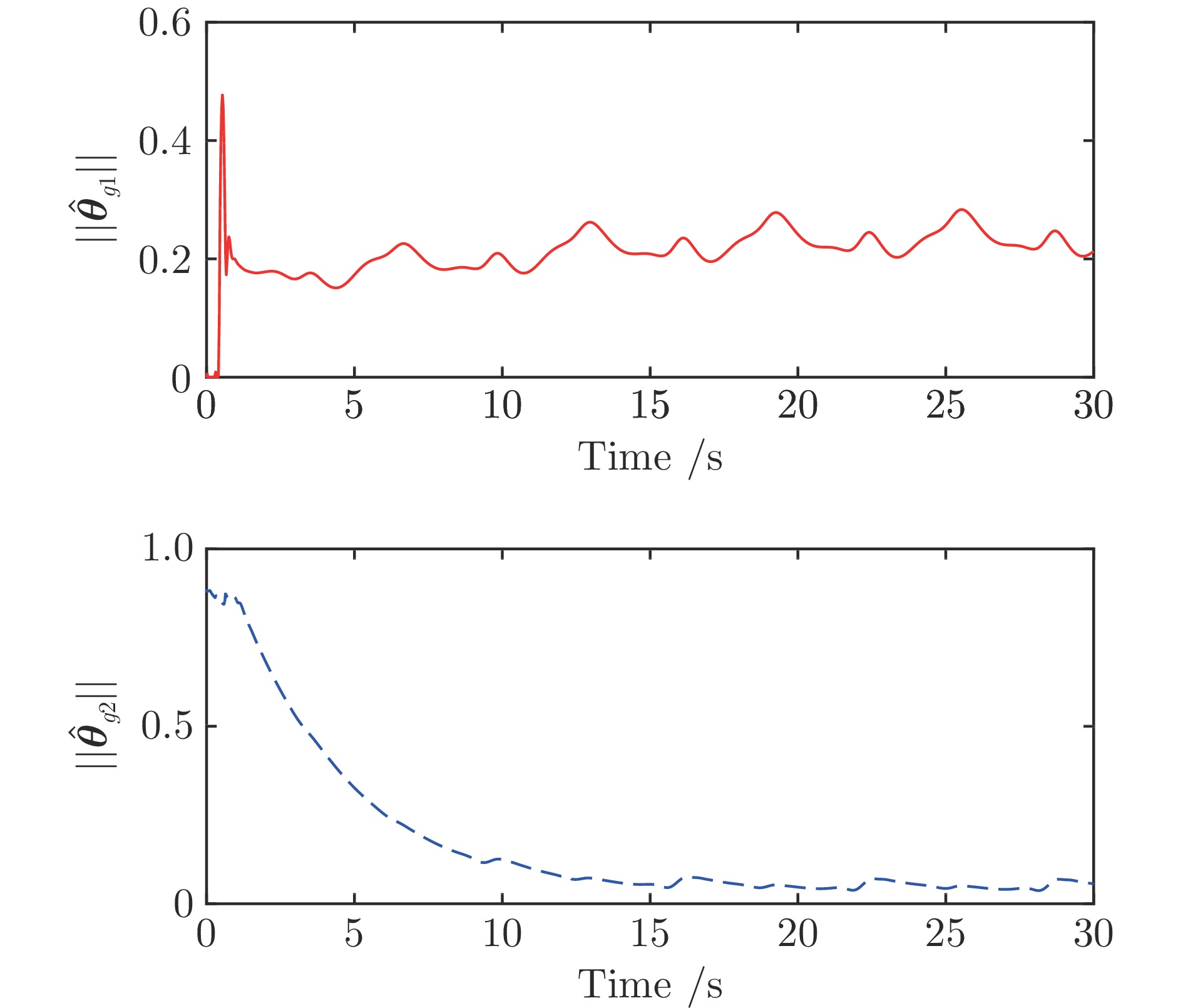
图 4 自适应参数$||\hat{{\boldsymbol{\theta}}}_{g1}||$和$||\hat{{\boldsymbol{\theta}}}_{g2}||$
Fig. 4 Adaptive parameters $||\hat{{\boldsymbol{\theta}}}_{g1}||$ and $||\hat{{\boldsymbol{\theta}}}_{g2}||$
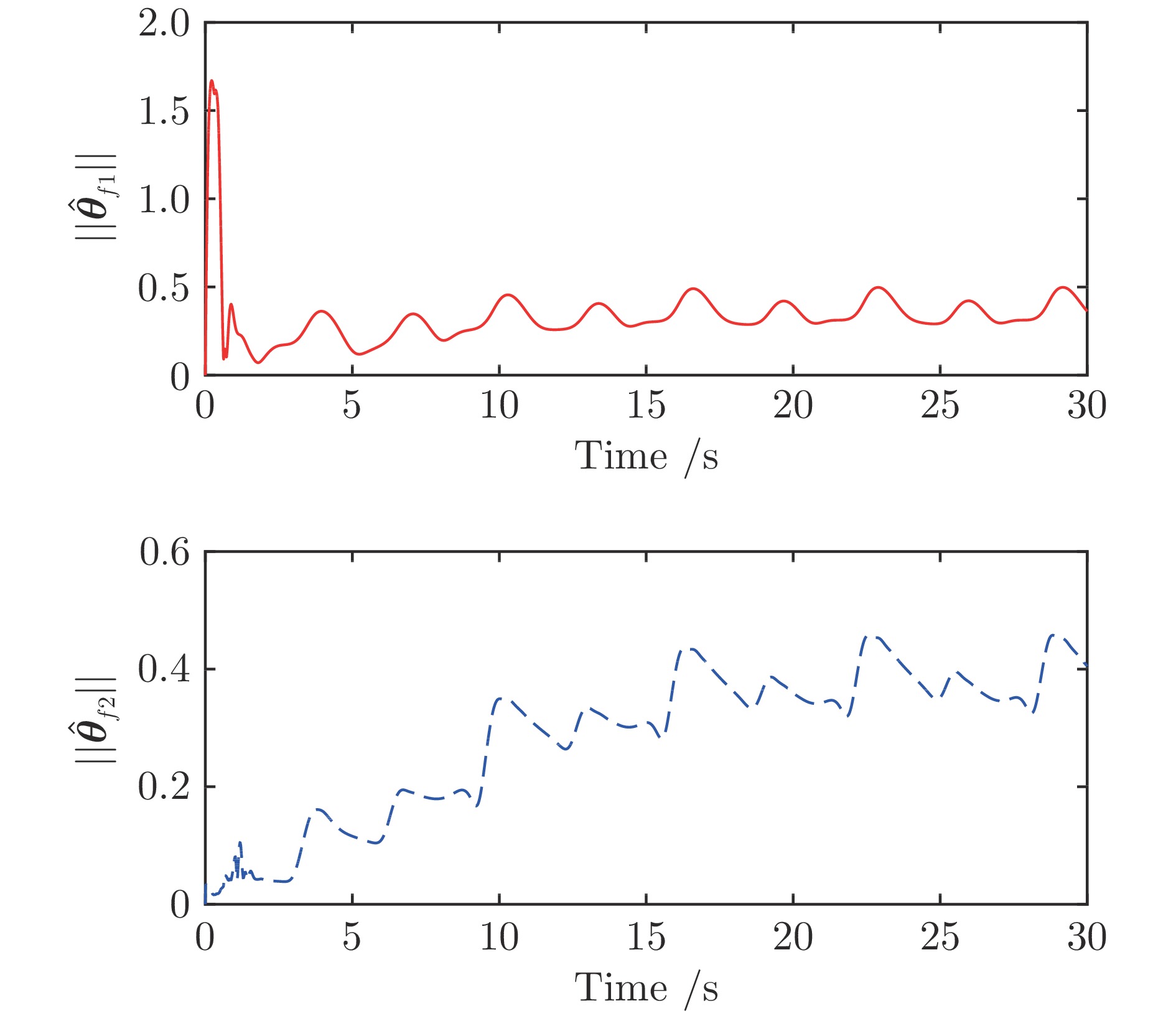
图 3 自适应参数$||\hat{{\boldsymbol{\theta}}}_{f1}||$和$||\hat{{\boldsymbol{\theta}}}_{f2}||$
Fig. 3 Adaptive parameters $||\hat{{\boldsymbol{\theta}}}_{f1}||$ and $||\hat{{\boldsymbol{\theta}}}_{f2}||$
-
[1] Edwards C, Spurgeon S. Sliding Mode Control. Bristol, PA: Taylor and Francis, 1998. [2] Isidori A. Nonlinear Control Systems, 3rd ed. Berlin: Springer-Verlag, 1995. [3] Liu Y H, Su C Y, Li H, Lu R. Barrier function-based adaptive control for uncertain strict-feedback systems within predefined neural network approximation sets. IEEE Transactions on Neural Networks and Learing Systems, 2020, 31(8): 2942−2954 doi: 10.1109/TNNLS.2019.2934403 [4] Lin W, Zhang X. A dynamic feedback framework for control of time-delay nonlinear systems with unstable zero dynamics. IEEE Transactions on Automatic Control, 2020, 65(8): 3317−3332 doi: 10.1109/TAC.2019.2940865 [5] Min H, Xu S, Zhang Z. Adaptive finite-time stabilization of stochastic nonlinear systems subject to full-state constraints and input saturation. IEEE Transactions on Automatic Control, 2021, 66(3): 1306−1313 doi: 10.1109/TAC.2020.2990173 [6] Wang C, Wang M, Liu T, Hill D J. Learning from ISS-Modular adaptive NN control of nonlinear strict-feedback systems. IEEE Transactions on Neural Networks and Learning Systems, 2012, 23(10): 1539−1550 doi: 10.1109/TNNLS.2012.2205702 [7] Theodorakopoulos A, Rovithakis G A. Guaranteeing preselected tracking quality for uncertain strict-feedback systems with deadzone input nonlinearity and disturbances via low-complexity control. Automatica, 2015, 54: 135−145 doi: 10.1016/j.automatica.2015.01.038 [8] Zhai D, An L W, Dong J X, Zhang Q L. Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems. Automatica, 2018, 97: 48−57 doi: 10.1016/j.automatica.2018.07.014 [9] Zhao K, Song Y D. Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems. IEEE Transactions on Automatic Control, 2019, 64(3): 1265−1272 doi: 10.1109/TAC.2018.2845707 [10] 周琪, 陈广登, 鲁仁全, 白伟伟. 基于干扰观测器的输入饱和多智能体系统事件触发控制. 中国科学: 信息科学, 2019, 49(11): 1502−1516 doi: 10.1360/SSI-2019-0105Zhou Qi, Chen Guang-Deng, Lu Ren-Quan, Bai Wei-Wei. Disturbance-observer-based event-triggered control for multi-agent systems with input saturation. Scientia Sinica Informationis, 2019, 49(11): 1502−1516 doi: 10.1360/SSI-2019-0105 [11] 杨彬, 周琪, 曹亮, 鲁仁全. 具有指定性能和全状态约束的多智能体系统事件触发控制. 自动化学报, 2019, 45(8): 1527−1535Yang Bin, Zhou Qi, Cao Liang, Lu Ren-Quan. Event-triggered control for multi-agent systems with prescribed performance and full state constraints. Acta Automatica Sinica, 2019, 45(8): 1527−1535 [12] 周琪, 林国怀, 马慧, 鲁仁全. 输入死区下的多输入多输出系统自适应神经网络容错控制. 中国科学: 信息科学, 2021, 51(4): 618−632 doi: 10.1360/SSI-2019-0198Zhou Qi, Lin Guo-Huai, Ma Hui, Lu Ren-Quan. Adaptive neural network fault-tolerant control for MIMO systems with dead zone inputs. Scientia Sinica Informationis, 2021, 51(4): 618−632 doi: 10.1360/SSI-2019-0198 [13] Yu X, Wang T, Qiu J, Gao H. Barrier Lyapunov function-based adaptive fault-tolerant control for a class of strict-feedback stochastic nonlinear systems. IEEE Transactions on Cybernetics, 2021, 51(2): 938−946 doi: 10.1109/TCYB.2019.2941367 [14] Liu Y H, Li H. Adaptive asymptotic tracking using barrier functions. Automatica, 2018, 98: 239−246 doi: 10.1016/j.automatica.2018.09.017 [15] Wang Z, Yuan Y, Yang H. Adaptive fuzzy tracking control for strict-feedback Markov jumping nonlinear systems with actuator failures and unmodeled dynamics. IEEE Transactions on Cybernetics, 2020, 50(1): 126−139 doi: 10.1109/TCYB.2018.2865677 [16] 张吉烈, 张化光, 罗艳红, 梁洪晶. 基于广义模糊双曲模型的自适应动态规划最优控制设计. 自动化学报, 2013, 39(2): 142−149 doi: 10.1016/S1874-1029(13)60016-6Zhang Ji-Lie, Zhang Hua-Guang, Luo Yan-Hong, Liang Hong-Jing. Nearly optimal control scheme using adaptive dynamic programming based on generalized fuzzy hyperbolic model. Acta Automatica Sinica, 2013, 39(2): 142−149 doi: 10.1016/S1874-1029(13)60016-6 [17] Song Y D, Shen Z Y, He L, Huang X C. Neuroadaptive control of strict feedback systems with full-state constraints and unknown actuation characteristics: An inexpensive solution. IEEE Transactions on Cybernetics, 2018, 48(11): 3126−3134 doi: 10.1109/TCYB.2017.2759498 [18] Jing Y H, Yang G H. Fuzzy adaptive fault-tolerant control for uncertain nonlinear systems with unknown dead-zone and unmodeled dynamics. IEEE Transactions on Fuzzy Systems, 2020, 27(12): 2265−2278 [19] Swaroop D, Hedrick J K, Yip P P, Gerdes J C. Dynamic surface control for a class of nonlinear systems. IEEE Transactions on Automatic Control, 2000, 45(10): 1893−1899 doi: 10.1109/TAC.2000.880994 [20] Yip P P, Hedrick J K. Adaptive dynamic surface control: A simplified algorithm for adaptive backstepping control of nonlinear systems. International Journal of Control, 2010, 71(5): 959−979 [21] Pan Y, Yu H. Composite learning from adaptive dynamic surface control. IEEE Transactions on Automatic Control, 2016, 61(9): 2603−2609 doi: 10.1109/TAC.2015.2495232 [22] 刘希, 孙秀霞, 刘树光, 徐嵩, 程志浩. 非线性增益递归滑模动态面自适应 NN 控制. 自动化学报, 2014, 40(10): 2193−2202Liu Xi, Sun Xiu-Xia, Liu Shu-Guang, Xu Song, Cheng Zhi-Hao. Recursive sliding-mode dynamic surface adaptive NN control with nonlinear gains. Acta Automatica Sinica, 2014, 40(10): 2193−2202 [23] Liu Y H. Adaptive dynamic surface asymptotic tracking for a class of uncertain nonlinear systems. International Journal of Robust and Nonlinear Control, 2017, 28(4): 1233−1245 [24] Farrell J A, Polycarpou M M, Sharma M, Dong W. Command filtered backstepping. IEEE Transactions on Automatic Control, 2009, 54(6): 1391−1395 doi: 10.1109/TAC.2009.2015562 [25] Dong W, Farrell J A, Polycarpou M M, Djapic V, Sharma M. Command filtered adaptive backstepping. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566−580 doi: 10.1109/TCST.2011.2121907 [26] Yu J, Shi P, Zhao L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica, 2018, 92: 173−180 doi: 10.1016/j.automatica.2018.03.033 [27] Li Y X. Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica, 2019, 106: 117−123 doi: 10.1016/j.automatica.2019.04.022 [28] Ma J, Park J H, Xu S. Command-filter-based finite-time adaptive control for nonlinear systems with quantized input. IEEE Transactions on Automatic Control, 2021, 66(5): 2339−2344 doi: 10.1109/TAC.2020.3006283 [29] Jiang B, Shen Q, Shi P. Neural-networked adaptive tracking control for switched nonlinear pure-feedback systems under arbitrary switching. Automatica, 2015, 61: 119−125 doi: 10.1016/j.automatica.2015.08.001 [30] Zheng X, Yang X. Command filter and universal approximator based backstepping control design for strict-feedback nonlinear systems with uncertainty. IEEE Transactions on Automatic Control, 2020, 65(3): 1310−1317 doi: 10.1109/TAC.2019.2929067 [31] Sun W, Wu Y Q, Sun Z Y. Command filter-based finite-time adaptive fuzzy control for uncertain nonlinear systems with prescribed performance. IEEE Transactions on Fuzzy Systems, 2020, 28(12): 3161−3170 doi: 10.1109/TFUZZ.2020.2967295 [32] Sun W, Su S F, Xia J, Zhuang G. Command filter-based adaptive prescribed performance tracking control for stochastic uncertain nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(10): 6555−6563 doi: 10.1109/TSMC.2019.2963220 [33] Zhang T, Ge S S, Hang C C. Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica, 2000, 36: 1635−1646 [34] Gong J Q, Yao B. Neural network adaptive robust control of nonlinear systems in semi-strict feedback form. Automatica, 2001, 37: 1149−1160 doi: 10.1016/S0005-1098(01)00069-3 [35] Bechlioulis C P, Rovithakis G A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica, 2009, 45: 532−538 doi: 10.1016/j.automatica.2008.08.012 [36] Huang X, Song Y, Lai J. Neuro-adaptive control with given performance specifications for strict feedback systems under full-state constraints. IEEE Transactions on Neural Networks and Learing Systems, 2019, 30(1): 25−34 doi: 10.1109/TNNLS.2018.2821668 [37] Tong S, Min X, Li Y, Huang X C. Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Transactions on Cybernetics, 2020, 50(9): 3903−3913 doi: 10.1109/TCYB.2020.2977175 [38] Polycarpou M M. Stable adaptive neural control scheme for nonlinear systems. IEEE Transactions on Automatic Control, 1996, 41(3): 447−451 doi: 10.1109/9.486648 [39] 李玉玲, 杨洪勇, 刘凡, 杨怡泽. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(9): 1783−1790Li Yu-Ling, Yang Hong-Yong, Liu Fan, Yang Yi-Ze. Finite-time containment control of second-order multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(9): 1783−1790 [40] Wang M, Zou Y T, Yang C G. System transformation-based neural control for full-state-constrained pure-feedback systems via disturbance observer. IEEE Transactions on Cybernetics, 2022, 52(3): 1479−1489 -

 下载:
下载:

计量
- 文章访问数: 1932
- HTML全文浏览量: 616
- PDF下载量: 321
- 被引次数: 0
