

-
摘要: 集群机器人系统是群体智能的一个重要应用研究领域, 也是机器人系统未来发展的重要方向之一. 集群机器人系统特性评价是一个极具挑战性的关键技术与理论问题, 对于集群机器人系统的研究与发展具有重要意义. 首先, 给出了对集群机器人系统基本概念的理解, 并且从多种不同角度作出了分类. 其次, 梳理了多个关键的集群机器人系统期望特性; 在此基础上, 分别从评价标准、评价指标体系和评价方法三方面对已有集群机器人系统特性评价研究成果进行了比较全面的评述. 最后, 分析总结了当前集群机器人系统特性评价研究工作的不足, 并对未来发展方向进行了展望.Abstract: Swarm robotic system is an important application and research field of swarm intelligence, and it is also an important trend of robotic systems in the future. Properties evaluation of swarm robotic systems is a challenging technical and theoretical problem, which is of great significance to its research and development. Firstly, this paper introduces the concept of swarm robotic system, and classifies it from different attributes. Secondly, some important properties expected are summarized. On this basis, it reviews current research status on swarm robotic systems property evaluation from three aspects including evaluation standards, evaluation index system and evaluation method. Finally, some shortcomings of current research on swarm robotic systems property evaluation are analyzed and summarized, and the future development direction is prospected.
-
Key words:
- Swarm robotic /
- system property /
- evaluation standard /
- evaluation index /
- evaluation method
-
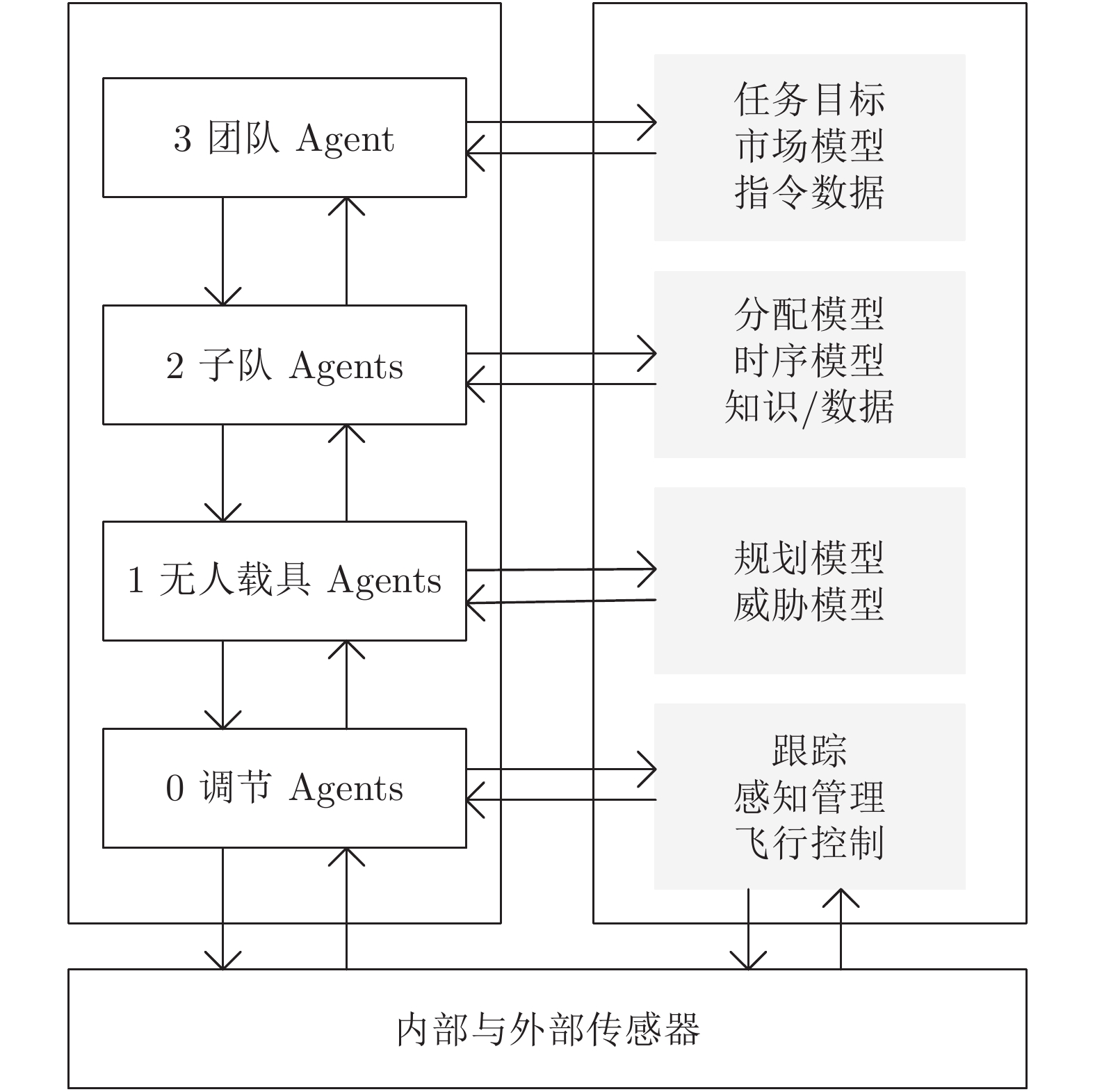
图 1 基于分层递阶的集群机器人协同控制结构
Fig. 1 Cooperative control process of swarm robots based on hierarchical structure

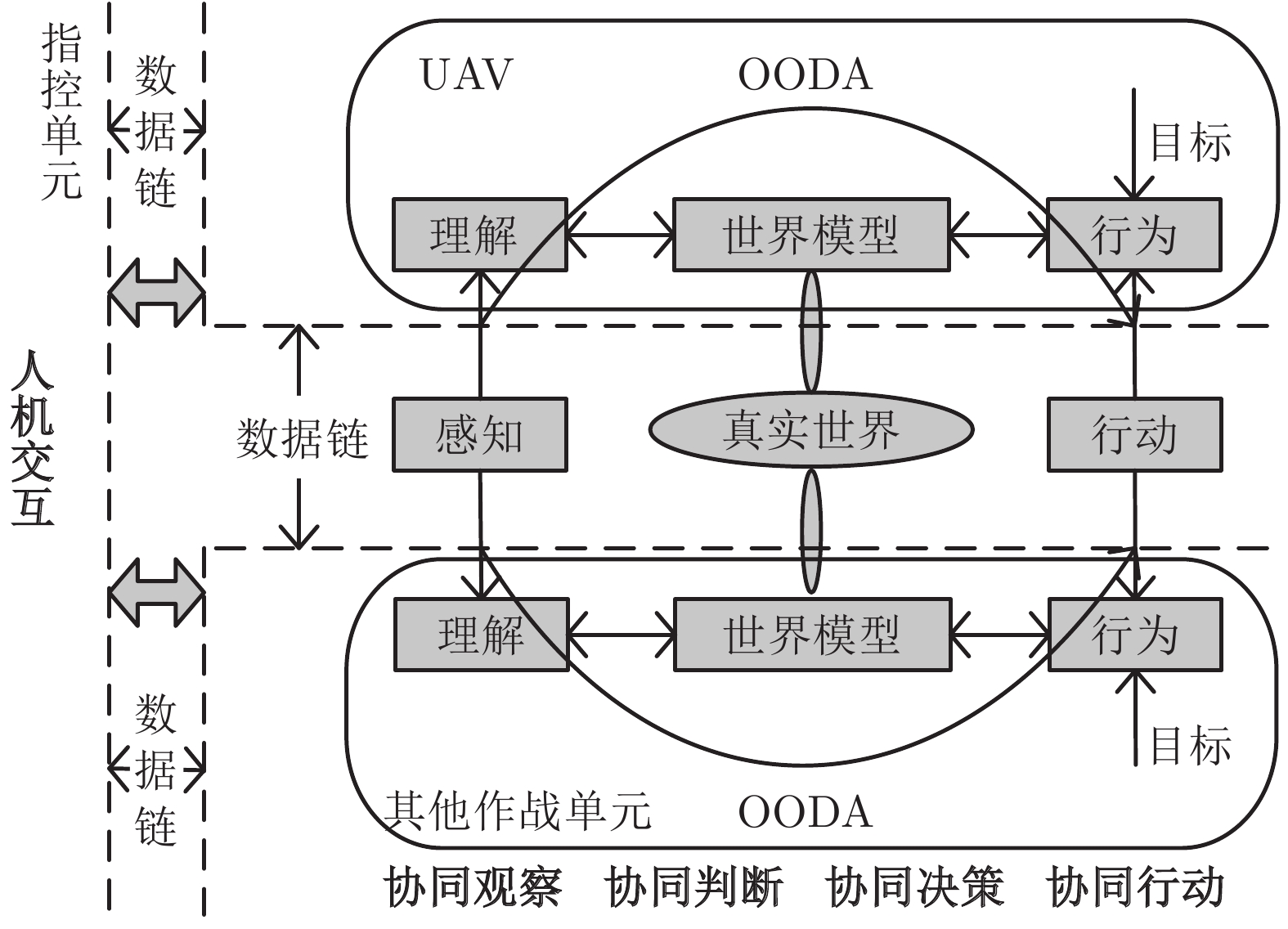
图 2 基于自组织的集群机器人协同控制流程
Fig. 2 Cooperative control process of swarm robots based on self-organization
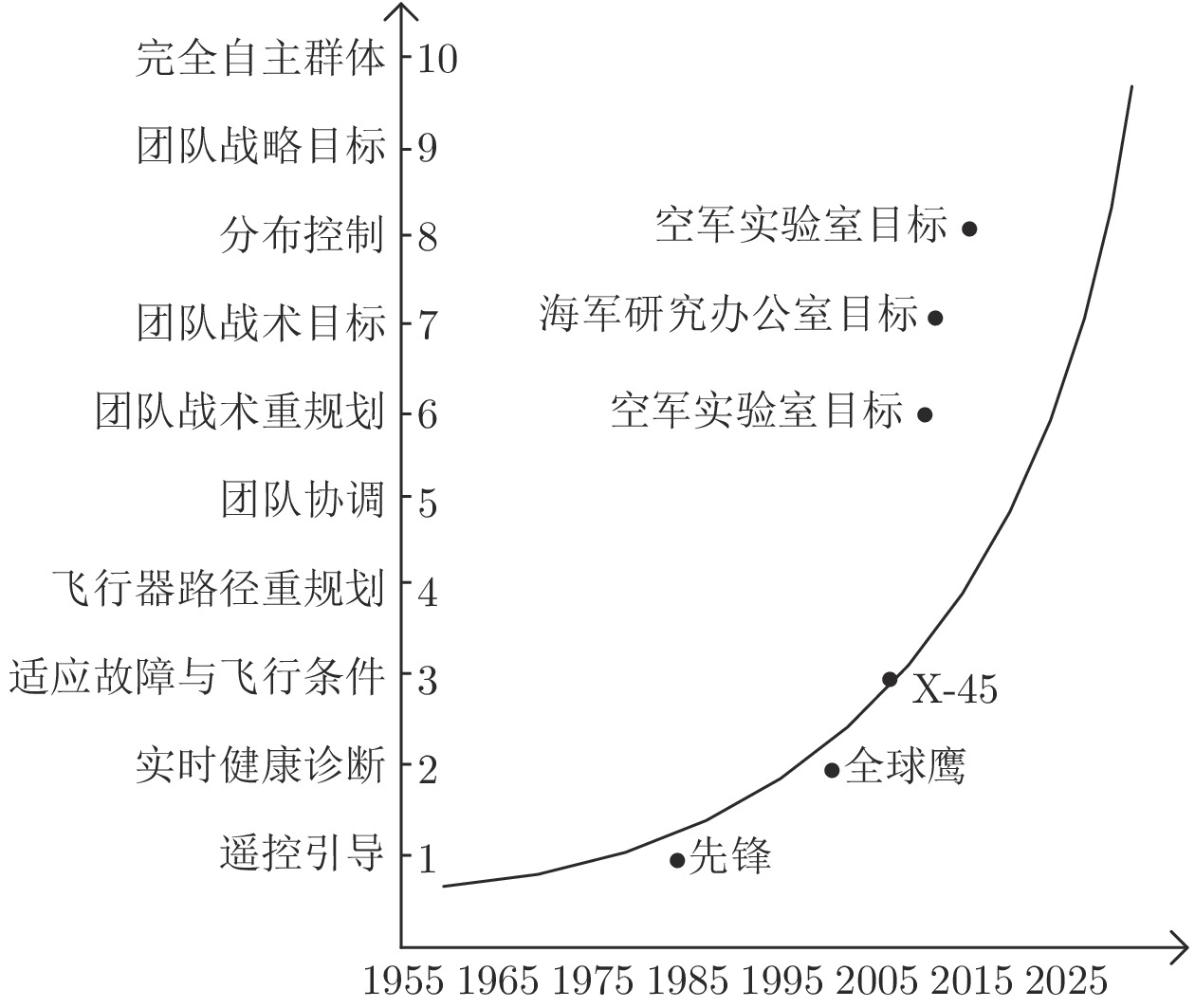
表 1 不同自主性等级划分标准比较
Table 1 Comparison of different autonomy level classification standards
提出时间 提出者 应用对象 级数 维度 1990 Zeigler 自主系统 3 一维 1991 Sheridan 自动装置 10 一维 2000 DOD UAV 10 一维 2002 ASB 陆上机器人系统 10 一维 2003 NIST ALFUS 无人系统(单机→集群) 10 三维 2003 Draper 机器人系统 4 三级 2003 AFRL UAV (单机→集群) 11 四维 2006 NASA UAV (单机→集群) 6 二维 2010 国防科技大学 UAV (单机→集群) 7 五维 2011 北京航空航天大学 UAV (单机→集群) 9 四维  下载: 导出CSV
下载: 导出CSV
表 2 系统自主性等级评价指标体系比较
Table 2 Comparison of autonomy level evaluation index systems
提出者 优点 缺点 Draper 突出系统自主性的核心能力 缺乏系统自主行为实现模型支撑 所有指标均采用定性度量 AFRL 以 OODA 模型为依据, 从本质上反映系统自主性 不能体现外部自主需求 NIST ALFUS 可较好反映系统外部自主需求 不能体现系统内部自主能力 国防科技大学 以 Co-OODA 模型为依据, 融合任务能力与效果 任务能力的各个度量定义太简单 北京航空航天大学 增加智能性与通信度量 缺乏系统自主行为实现模型支撑
下载: 导出CSV
表 3 系统智能性量化评价指标体系比较
Table 3 Comparison of system intelligence quantitative evaluation index systems
提出者 优点 缺点 北京理工大学 以系统智能行为为依据构建评价指标,
评价者无需详细了解系统的内部实现需要构建统一的测试场景, 设计专门的数据采集系统,
实施难度大, 成本高北京科技大学 以系统结构与行为效果为依据构建指标,
分布测试, 无需构造统一的测试场景评价者需要从对系统的内部实现详细的了解,
并设计与实施多个不同的测试项
下载: 导出CSV
表 4 机器人系统自主性的不同评价方法比较
Table 4 Comparison of different autonomy evaluation methods of robotic system
方法名称 量化属性 方法优点 方法缺点 定性等级量表法 定性转定量 直观、具有明确的量化坐标值 缺乏详细量化指标 时间序列预测法 定性为主 便于制定发展决策与规划 标准需要持续更新 三维智能空间图表法 定性转定量 三维定性定级, 管理人员喜欢 缺乏详细量化指标 多维区间打分法 定性转定量 多维综合评分定级, 管理人员喜欢 缺乏详细量化指标 蛛网评价模型 量化为主 通用性强, 轴可扩展、等级可定制 轴与等级定制是关键 模糊综合评价法 定性转定量 模糊决策, 更符合人的思维方式 计算复杂, 不易操作 云重心评价法 定性转定量 模糊决策, 更符合人的思维方式 计算复杂, 不易操作
下载: 导出CSV
-
[1] 贾永楠, 田似营, 李擎. 无人机集群研究进展综述. 航空学报, 2020, 41(S1): Article No. 723738Jia Yong-Nan, Tian Si-Ying, Li Qing. Recent development of unmanned aerial vehicle swarms. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): Article No. 723738 [2] Dong X W, Yu B C, Shi Z Y, Zhong Y S. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348 doi: 10.1109/TCST.2014.2314460 [3] Dong X W, Zhou Y, Ren Z, Zhong Y S. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Transactions on Industrial Electronics, 2017, 64(6): 5014-5024 doi: 10.1109/TIE.2016.2593656 [4] Dong X W, Hua Y Z, Zhou Y, Ren Z, Zhong Y S. Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems. IEEE Transactions on Automation Science and Engineering, 2019, 16(1): 229-240 doi: 10.1109/TASE.2018.2792327 [5] Dong X W, Li Y F, Lu C, Hu G Q, Li Q D, Ren Z. Time-varying formation tracking for UAV swarm systems with switching directed topologies. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(12): 3674-3685 doi: 10.1109/TNNLS.2018.2873063 [6] Wei H X, Chen Y D, Liu M, Cai Y P, Wang T M. Swarm robots. The Computer Journal, 2011, 54(9): 1465-1474 doi: 10.1093/comjnl/bxq072 [7] Brambilla M, Ferrante E, Birattari M, Dorigo M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intelligence, 2013, 7(1): 1-41 doi: 10.1007/s11721-012-0075-2 [8] Seeja G, Arockia S A, Berlin H V. A survey on swarm robotic modeling, analysis and hardware architecture. Procedia Computer Science, 2018, 133: 478-485 doi: 10.1016/j.procs.2018.07.060 [9] Beni G. From swarm intelligence to swarm robotics. In: Proceedings of the SAB 2004 International Workshop on Swarm Robotics. Santa Monica, USA: Springer, 2004. [10] 吴军, 徐昕, 连传强, 贺汉根. 协作多机器人系统研究进展综述. 智能系统学报, 2011, 6(1): 13-27 doi: 10.3969/j.issn.1673-4785.2011.01.002Wu Jun, Xu Xin, Lian Chuan-Qiang, He Han-Gen. A survey of recent advances in cooperative multi-robot systems. CAAI Transactions on Intelligent Systems, 2011, 6(1): 13-27 doi: 10.3969/j.issn.1673-4785.2011.01.002 [11] 王伟嘉, 郑雅婷, 林国政, 张亮, 韩战钢. 集群机器人研究综述. 机器人, 2020, 42(2): 232-256Wang Wei-Jia, Zheng Ya-Ting, Lin Guo-Zheng, Zhang Liang, Han Zhan-Gang. Swarm robotics: A review. Robot, 2020, 42(2): 232-256 [12] Hernández-Orallo J. Evaluation in artificial intelligence: From task-oriented to ability-oriented measurement. Artificial Intelligence Review, 2017, 48(3): 397-447 doi: 10.1007/s10462-016-9505-7 [13] 梁晓龙, 张佳强, 吕娜. 无人机集群. 西安: 西北工业大学出版社, 2018.Liang Xiao-Long, Zhang Jia-Qiang, Lv Na. Unmanned Swarms. Xi'an: Northwestern Polytechnical University Press, 2018. [14] Sahin E. Swarm robotics: From sources of inspiration to domains of application. In: Proceedings of the SAB 2004 International Workshop on Swarm Robotics. Santa Monica, USA: Springer, 2004. [15] Tan Y, Zheng Z Y. Research advance in swarm robotics. Defence Technology, 2013, 9(1): 18-39 doi: 10.1016/j.dt.2013.03.001 [16] Rubenstein M, Ahler C, Nagpal R. Kilobot: A low cost scalable robot system for collective behaviors. In: Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Saint Paul, USA: IEEE, 2012. [17] Turgut A E, Çelikkanat H, Gökçe F, Șahin E. Self-organized flocking in mobile robot swarms. Swarm Intelligence, 2008, 2(2-4): 97-120 doi: 10.1007/s11721-008-0016-2 [18] Harlan R M, Levine D B, McClarigan S. The Khepera robot and the kRobot class: A platform for introducing robotics in the undergraduate curriculum. In: Proceedings of the 32nd SIGCSE Technical Symposium on Computer Science Education. Charlotte, USA: ACM, 2001. [19] Woern H, Szymanski M, Seyfried J. The I-SWARM project. In: Proceedings of the 15th IEEE International Symposium on Robot and Human Interactive Communication. Hatfield, UK: IEEE, 2006. 492−496 [20] Sun X L, Liu T, Hu C, Fu Q B, Yue S G. ColCOSϕ: A multiple pheromone communication system for swarm robotics and social insects research. In: Proceedings of the IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM). Toyonaka, Japan: IEEE, 2019. 59−66 [21] McLurkin J, Smith J. Distributed algorithms for dispersion in indoor environments using a swarm of autonomous mobile robots. Distributed Autonomous Robotic Systems 6. Tokyo: Springer, 2007. [22] Kawauchi Y, Fukuda T. Numerical analysis of distributed system based on knowledge-module of cellular robotic system ′CEBOT′. In: Proceedings of the 1991 IEEE/RSJ International Workshop on Intelligent Robots and Systems. Osaka, Japan: IEEE, 1991. 1205−1210 [23] Fukuda T, Nakagawa S, Kawauchi Y, Buss M. Self organizing robots based on cell structures-CKBOT. In: Proceedings of the 1988 IEEE International Workshop on Intelligent Robots. Tokyo, Japan: IEEE, 1988. 145−150 [24] Romanishin J W, Mamish J, Rus D. Decentralized control for 3D M-blocks for path following, line formation, and light gradient aggregation. In: Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Macau, China: IEEE, 2019. 4862−4868 [25] Liu P J, Zhu Y H, Cui X D, Wang X L, Yan J H, Zhao J. Multisensor-based autonomous docking for UBot modular reconfigurable robot. In: Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation. Chengdu, China: IEEE, 2012. 772−776 [26] Wei H X, Cai Y P, Li H Y, Li D Z, Wang T M. Sambot: A self-assembly modular robot for swarm robot. In: Proceedings of the 2010 IEEE International Conference on Robotics and Automation. Anchorage, USA: IEEE, 2010. 66−71 [27] Parker L E. ALLIANCE: An architecture for fault tolerant multirobot cooperation. IEEE Transactions on Robotics and Automation, 1998, 14(2): 220-240 doi: 10.1109/70.681242 [28] Parker L E. The effect of heterogeneity in teams of 100+ mobile robots. Multi-robot Systems: From Swarms to Intelligent Automata, Volume Ⅱ. Berlin: Kluwer, 2003. 205−215 [29] Zhang Y, Parker L E. IQ-ASyMTRe: Forming executable coalitions for tightly coupled multirobot tasks. IEEE Transactions on Robotics, 2013, 29(2): 400-416 doi: 10.1109/TRO.2012.2228135 [30] Tang F, Parker L E. A complete methodology for generating multi-robot task solutions using ASyMTRe-D and market-based task allocation. In: Proceedings of the 2007 IEEE International Conference on Robotics and Automation (ICRA). Rome, Italy: IEEE, 2007. [31] Howard A, Parker L E, Sukhatme G S. Experiments with a large heterogeneous mobile robot team: Exploration, mapping, deployment and detection. International Journal of Robotics Research, 2006, 25(5-6): 431-447 doi: 10.1177/0278364906065378 [32] Parker L E, Fregene K, Guo Y, Madhavan R. Distributed heterogeneous sensing for outdoor multi-robot localization, mapping, and path planning. Multi-robot Systems: From Swarms to Intelligent Automata. Dordrecht: Springer, 2002. 21−30 [33] Lima P U, Saridis G N. Design of Intelligent Control Systems Based on Hierarchical Stochastic Automata. Singapore: World Scientific, 1996. [34] Chandler P R, Pachter M, Rasmussen S R. UAV cooperative control. In: Proceedings of the 2001 American Control Conference. Arlington, USA: IEEE, 2001. [35] Gu Y, Seanor B, Campa G, Napolitano M R, Rowe L, Gururajan S, et al. Design and flight testing evaluation of formation control laws. IEEE Transactions on Control Systems Technology, 2006, 14(6): 1105-1112 doi: 10.1109/TCST.2006.880203 [36] Yun X P, Alptekin G, Albayrak O. Line and circle formation of distributed physical mobile robots. Journal of Robotic Systems, 1997, 14(2): 63-76 doi: 10.1002/(SICI)1097-4563(199702)14:2<63::AID-ROB2>3.0.CO;2-R [37] Boyd J R. The essence of winning and losing [Online], available: http://pogoarchives.org/m/dni/john_boyd_compendium/essence_of_winning_losing.pdf, February 2, 2022 [38] 沈林成, 牛轶峰, 朱华勇. 多无人机自主协同控制理论与方法. 北京: 国防工业出版社, 2013.Shen Lin-Cheng, Niu Yi-Feng, Zhu Hua-Yong. Theories and Methods of Autonomous Cooperative Control for Multiple UAVs. Beijing: National Defense Industry Press, 2013. [39] 石志国, 王志良, 刘冀伟. 异构多机器人协作系统研究进展. 智能系统学报, 2009, 4(5): 377-391Shi Zhi-Guo, Wang Zhi-Liang, Liu Ji-Wei. Developments in heterogeneous multi-robot cooperation systems. CAAI Transactions on Intelligent System, 2009, 4(5): 377-391 [40] Dudek G, Jenkin M, Milios E, Wilkes D. A taxonomy for swarm robots. In: Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems. Yokohama, Japan: IEEE, 1993. [41] Huang H M, Albus J S, Messina E R, Wade R L, English R W. Specifying autonomy levels for unmanned systems: Interim report. In: Proceedings of the 2004 Unmanned Ground Vehicle Technology VI. Orlando, USA: SPIE, 2004. [42] Huntsberger T, Woodward G. Intelligent autonomy for unmanned surface and underwater vehicles. In: Proceedings of the 2011 MTS/IEEE KONA. Waikoloa, USA: IEEE, 2011. [43] Zhao Z, Wang C, Niu Y F, Shen L C, Ma Z W, Wu L Z. Adjustable autonomy for human-UAVs collaborative searching using fuzzy cognitive maps. In: Proceedings of the 2nd China Symposium on Cognitive Computing and Hybrid Intelligence (CCHI). Xi'an, China: IEEE, 2019. [44] Mostafa S A, Mustapha A, Mohammed M A, Ahmad M S, Mahmoud A M. A fuzzy logic control in adjustable autonomy of a multi-agent system for an automated elderly movement monitoring application. International Journal of Medical Informatics, 2018, 112: 173-184 doi: 10.1016/j.ijmedinf.2018.02.001 [45] 蔡自兴. 智能控制 (第 2 版). 北京: 电子工业出版社, 2004.Cai Zi-Xing. Intelligent Control (Second Edition). Beijing: Publishing House of Electronics Industry, 2004. [46] Krause J, Ruxton G D, Krause S. Swarm intelligence in animals and humans. Trends in Ecology & Evolution, 2010, 25(1): 28-34 [47] Krause S, James R, Faria J J, Ruxton G D, Krause J. Swarm intelligence in humans: Diversity can trump ability. Animal Behaviour, 2011, 81(5): 941-948. doi: 10.1016/j.anbehav.2010.12.018 [48] Leimeister J M. Collective intelligence. Business & Information Systems Engineering, 2010, 2(4): 245-248 [49] 赵健, 张鑫褆, 李佳明, 贺晨. 群体智能2.0研究综述. 计算机工程, 2019, 45(12): 1-7Zhao Jian. Zhang Xin-Ti, Li Jia-Ming, He Chen. Research review of crowd intelligence 2.0. Computer Engineering, 2019, 45(12): 1-7 [50] 王玫, 朱云龙, 何小贤. 群体智能研究综述. 计算机工程, 2005, 31(22): 194-196 doi: 10.3969/j.issn.1000-3428.2005.22.068Wang Mei, Zhu Yun-Long, He Xiao-Xian. A survey of swarm intelligence. Computer Engineering, 2005, 31(22): 194-196 doi: 10.3969/j.issn.1000-3428.2005.22.068 [51] 段海滨, 邱华鑫. 基于群体智能的无人机集群自主控制. 北京: 科学出版社, 2018.Duan Hai-Bin, Qiu Hua-Xin. Unmanned Aerial Vehicle Swarm Autonomous Control Based on Swarm Intelligence. Beijing: Science Press, 2018. [52] 范彦铭. 无人机的自主与智能控制. 中国科学: 技术科学, 2017, 47(3): 221-229 doi: 10.1360/N092017-00001Fan Yan-Ming. Autonomous and intelligent control of the unmanned aerial vehicle. Scientia Sinica Technologica, 2017, 47(3): 221-229 doi: 10.1360/N092017-00001 [53] Noreils F R. Toward a robot architecture integrating cooperation between mobile robots: Application to indoor environment. The International Journal of Robotics Research, 1993, 12(1): 79-98 doi: 10.1177/027836499301200106 [54] Tuci E, Groß R, Trianni V, Mondada F, Dorigo M. Cooperation through self-assembly in multi-robot systems. ACM Transactions on Autonomous and Adaptive Systems, 2006, 1(2): 115-150 doi: 10.1145/1186778.1186779 [55] Cao Y U, Fukunaga A S, Kahng A. Cooperative mobile robotics: Antecedents and directions. Autonomous Robots, 1997, 4(1): 7-27 doi: 10.1023/A:1008855018923 [56] Murphey R, Pardalos P M. Cooperative Control and Optimization. Dordrecht: Kluwer Academic Publishers, 2002. [57] Harwell J, Gini M. Swarm engineering through quantitative measurement of swarm robotic principles in a 10000 robot swarm. In: Proceedings of the 28th International Joint Conference on Artificial Intelligence (IJCAI-19). Macao, China: AAAI, 2019. [58] Lerman K, Martinoli A, Galstyan A. A review of probabilistic macroscopic models for swarm robotic systems. In: Proceedings of the SAB 2004 International Workshop on Swarm Robotics. Santa Monica, USA: Springer, 2004. [59] Fukuda T, Funato D, Sekiyama K, Arai F. Evaluation on flexibility of swarm intelligent system. In: Proceedings of the 1998 IEEE International Conference on Robotics and Automation. Leuven, Belgium: IEEE, 1998. [60] Oztemel E, Kubat C, Uygun O, Canvar T, Korkusuz T, Raja V, et al. Performance assessment of swarm robots. In: Proceedings of the 13th International Conference on Human-Computer Interaction. Novel Interaction Methods and Techniques. San Diego, USA: Springer, 2009. [61] Liu Y, Passino K M. Swarm Intelligence: Literature Overview, Technical Report, Department of Electrical Engineering, The Ohio State University, USA, 2000 [62] Zeigler B P. High autonomy systems: Concepts and models. In: Proceedings of the 1990 AI, Simulation and Planning in High Autonomy Systems. Tucson, USA: IEEE, 1990. [63] Sheridan T B. Automation, authority and angst — revisited. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 1991, 35(1): 2-6 doi: 10.1177/154193129103500103 [64] Office of the Secretary of Defense. Unmanned Aerial Vehicles Roadmap 2000-2025, Office of the Secretary of Defense, Washington, DC, USA, 2001 [65] Office of the Secretary of Defense. Unmanned Aerial Vehicles Roadmap 2002-2027, Office of the Secretary of Defense, Washington, DC, USA, 2002 [66] Office of the Secretary of Defense. Unmanned Aircraft System Roadmap 2005-2030, Office of the Secretary of Defense, Washington, DC, USA, 2005 [67] Department of Defense. Unmanned Systems Integrated Roadmap FY2011-2036, Department of Defense, USA, 2011 [68] Department of Defense. Unmanned Systems Integrated Roadmap FY2013-2038, Department of Defense, USA, 2013 [69] Mulgaonka P, Blair J, Dodd R, Martinez D, Perna R D J. Ad Hoc Study on Human Robot Interface Issues, Army Science Board, USA, 2002 [70] Goodrich M A, Crandall J W, Stimpson J L. Neglect tolerant teaming: Issues and dilemmas. In: Proceedings of the 2003 AAAI Spring Symposium on Human Interaction With Autonomous Systems in Complex Environments. Provo, USA: AAAI, 2003. [71] Clough B T. Metrics, schmetrics! How do you track a UAV's autonomy? In: Proceedings of the 1st UAV Conference. Portsmouth, USA: AIAA, 2002. [72] Suresh M, Ghose D. Role of information and communication in redefining unmanned aerial vehicle autonomous control levels. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2010, 224(2): 171-197 doi: 10.1243/09544100JAERO606 [73] Young L A, Yetter J A, Guynn M D. System analysis applied to autonomy: Application to high-altitude long-endurance remotely operated aircraft. In: Proceedings of the 2005 AIAA Infotech @ Aerospace Conference. Arlington, USA: AIAA, 2006. [74] Wu L Z, Niu Y F, Zhu H Y, Shen L C. Modeling and characterizing of unmanned aerial vehicles autonomy. In: Proceedings of the 8th World Congress on Intelligent Control and Automation (WCICA). Jinan, China: IEEE, 2010. 2284−2288 [75] 陈宗基, 魏金钟, 王英勋, 周锐. 无人机自主控制等级及其系统结构研究. 航空学报, 2011, 32(6): 1075-1083Chen Zong-Ji, Wei Jin-Zhong, Wang Ying-Xun, Zhou Rui. UAV autonomous control levels and system structure. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1075-1083 [76] 熊光明, 高利, 吴绍斌, 赵亚男, 李大捷. 无人驾驶车辆智能行为及其测试与评价. 北京: 北京理工大学出版社, 2015.Xiong Guang-Ming, Gao Li, Wu Shao-Bin, Zhao Ya-Nan, Lee Dah-Jye. Intelligent Behaviors and Test and Evaluation for Unmanned Ground Vehicles. Beijing: Beijing Institute of Technology Press, 2015. [77] 姜长生, 王从庆, 魏海坤, 陈谋. 智能控制与应用. 北京: 科学出版社, 2007.Jiang Chang-Sheng, Wang Cong-Qing, Wei Hai-Kun, Chen Mou. Intelligent Control and Application. Beijing: Science Press, 2007. [78] 刘东, 尹怡欣, 涂序彦. 智能系统的广义智能定性评价之研究. 计算机科学, 2007, 34(9): 167-169 doi: 10.3969/j.issn.1002-137X.2007.09.044Liu Dong, Yin Yi-Xin, Tu Xu-Yan. Research on qualitative evaluation of generalized intelligence in intelligent system. Computer Science, 2007, 34(9): 167-169 doi: 10.3969/j.issn.1002-137X.2007.09.044 [79] Millonas M M. Swarms, phase transitions, and collective intelligence. Proc Artificial Life, 1994, 101(8): 137−151 [80] Banks A, Vincent J, Phalp K. Particle swarm guidance system for autonomous unmanned aerial vehicles in an air defence role. The Journal of Navigation, 2008, 61(1): 9-29 doi: 10.1017/S0373463307004444 [81] 杨哲, 张汝波. 无人系统自主等级模糊评价方法. 小型微型计算机系统, 2009, 30(10): 2043-2047Yang Zhe, Zhang Ru-Bo. Fuzzy evaluated method for the autonomy levels of unmanned systems. Journal of Chinese Computer Systems, 2009, 30(10): 2043-2047 [82] 李静, 唐振民, 谭业发, 石朝侠. 无人地面车辆自主性评价指标体系研究. 微型机与应用, 2016, 35(2): 66-69 doi: 10.3969/j.issn.1674-7720.2016.02.022Li Jing, Tang Zhen-Min, Tang Ye-Fa, Shi Zhao-Xia. Research on autonomy evaluation index system of the unmanned ground vehicles. Microcomputer & its Applications, 2016, 35(2): 66-69 doi: 10.3969/j.issn.1674-7720.2016.02.022 [83] Zhang S, Li X R, Zhang P, Guo Q. UAV autonomy evaluation based on multi-factors fuzzy evaluation. In: Proceedings of the 7th International Conference on Mechanical and Aerospace Engineering (ICMAE). London, UK: IEEE, 2016. [84] 刘东, 尹怡欣, 涂序彦, 董洁. 一种智能控制系统智能水平的评价方法. 见: 2005 年中国智能自动化会议论文集. 青岛, 中国: 中国自动化学会智能自动化专业委员会, 2005. 24−29Liu Dong, Yin Yi-Xin, Tu Xu-Yan, Dong Jie. A method of intelligent-evaluation for intelligent control systems. In: Proceedings of the 2005 Chinese Intelligent Automation Conference. Qingdao, China: Intelligent Automation Professional Committee of China Automation Society, 2005. 24−29 [85] 曹文静, 杨林. 多无人机自主协同方法协同性能研究. 飞航导弹, 2017(5): 43−49Cao Wen-Jing, Yang Lin. Research on cooperative performance of multi-UAV autonomous cooperative method. Aerodynamic Missile Journal, 2017(5): 43−49 [86] Camazine S, Deneubourg J L, Franks N R, Sneyd J, Theraula G, Bonabeau E. Self-Organization in Biological Systems. Princeton: Princeton University Press, 2001. [87] Hecker J P, Moses M E. Beyond pheromones: Evolving error-tolerant, flexible, and scalable ant-inspired robot swarms. Swarm Intelligence, 2015, 9(1): 43-70 [88] Szabo C, Teo Y M, Chengleput G K. Understanding complex systems: Using interaction as a measure of emergence. In: Proceedings of the 2014 Winter Simulation Conference. Savannah, USA: IEEE, 2014. [89] Wang X H, Zhang Y, Wang L Z, Lu D W, Zeng G Q. Robustness evaluation method for unmanned aerial vehicle swarms based on complex network theory. Chinese Journal of Aeronautics, 2020, 33(1): 352-364 doi: 10.1016/j.cja.2019.04.025 [90] Gazi V, Passino K M. Stability analysis of social foraging swarms. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2004, 34(1): 539-557 doi: 10.1109/TSMCB.2003.817077 [91] Liu Y, Passino K M, Polycarpou M M. Stability analysis of M-dimensional asynchronous swarms with a fixed communication topology. IEEE Transactions on Automatic Control, 2003, 48(1): 76-95 doi: 10.1109/TAC.2002.806657 [92] 陈世明, 方华京. 大规模智能群体的建模及稳定性分析. 控制与决策, 2005, 20(5): 490-494 doi: 10.3321/j.issn:1001-0920.2005.05.002Chen Shi-Ming, Fang Hua-Jing. Modeling and stability analysis of large-scale intelligent swarm. Control and Decision, 2005, 20(5): 490-494 doi: 10.3321/j.issn:1001-0920.2005.05.002 [93] 薛志斌. 智能群体系统集群行为的动力学建模与分析及其仿真研究 [博士学位论文], 兰州理工大学, 中国, 2013Xue Zhi-Bin. Dynamic Modeling, Stability Analysis and Simulation on Collective Behavior of Intelligent Swarm Systems [Ph. D. dissertation], Lanzhou University of Technology, China, 2013 [94] Bahgeci E, Sahin E. Evolving aggregation behaviors for swarm robotic systems: A systematic case study. In: Proceedings of the 2005 IEEE Swarm Intelligence Symposium. Pasadena, USA: IEEE, 2005. [95] Lerman K, Galstyan A. Mathematical model of foraging in a group of robots: Effect of interference. Autonomous Robots, 2002, 13(2): 127-141 doi: 10.1023/A:1019633424543 [96] Rybski P, Larson A, Lindahl M, Gini M. Performance evaluation of multiple robots in a search and retrieval task. In: Proceedings of the 1998 Workshop on Artificial Intelligence and Manufacturing. AAAI, 1998. [97] Soysal O, Sahin E. Probabilistic aggregation strategies in swarm robotic systems. In: Proceedings of the 2005 IEEE Swarm Intelligence Symposium. Pasadena, USA: IEEE, 2005. [98] Sugawara K, Sano M, Yoshihara I, Abe K, Watanabe T. Foraging behaviour of multi-robot system and emergence of swarm intelligence. In: Proceedings of the 1999 IEEE International Conference on Systems, Man, and Cybernetics. Tokyo, Japan: IEEE, 2002. [99] 王越超, 刘金国. 无人系统的自主性评价方法. 科学通报, 2012, 57(15): 1290-1299 doi: 10.1360/csb2012-57-15-1290Wang Yue-Chao, Liu Jin-Guo. Evaluation methods for the autonomy of unmanned systems. Chinese Science Bulletin, 2012, 57(26): 3409-3418 doi: 10.1360/csb2012-57-15-1290 [100] 郭道劝. 基于TRL的技术成熟度模型及评估研究. 国防科技, 2017, 38(3): 34-44Guo Dao-Quan. Research on technology maturity model based on TRL and its evaluation. National Defense Science & Technology, 2017, 38(3): 34-44 [101] Bilbro J W. A suite of tools for technology assessment. In: Proceedings of the 2007 AFRL Technology Maturity Conference. Virginia Beach, USA: JB Consulting International, 2007. 1123−1129 [102] 阎岩, 唐振民. 基于云模型的地面智能机器人自主性评价方法. 南京理工大学学报, 2012, 36(3): 420-426Yan Yan, Tang Zhen-Min. Autonomy evaluation method of ground intelligent robot based on cloud model. Journal of Nanjing University of Science and Technology, 2012, 36(3): 420-426 [103] Curtin T B, Crimmins D M, Curcio J, Benjamin M, Roper C. Autonomous underwater vehicles: Trends and transformations. Marine Technology Society Journal, 2005, 39(3): 65-75 doi: 10.4031/002533205787442521 [104] Doboli A, Curiac D, Pescaru D, Doboli S, Tang W, Volosencu C, et al. Cities of the Future: Employing Wireless Sensor Networks for Efficient Decision Making in Complex Environments, CEAS Technical Report Nr 831, University at Stony Brook, USA, 2008 [105] Liu F, Shi Y, Shi Y. Three IQs of AI systems and their testing methods. The Journal of Engineering, 2020, 2020(3): 566-571 [106] Liu F, Shi Y, Wang B. World search engine IQ test based on the internet IQ evaluation algorithms. International Journal of Information Technology & Decision Making, 2015, 14(2): 221-237 [107] Liu F, Shi Y. A study on artificial intelligence IQ and standard intelligent model. arXiv: 1512.00977, 2015. [108] 矫永康, 李小民, 毛琼. 改进模糊层次分析法在虚拟维修训练评估中的应用[J]. 计算机工程, 2014, 40(10):314−317Jiao Y K, Li X M, Mao Q. Application of improved analysis process in virtual maintenance training evaluation. Computer Engineering. Shanghai, 2014, 40(10): 314−317 [109] Brown P, Lauder H. Collective intelligence. Capitalism and Social Progress: The Future of Society in a Global Economy. London: Palgrave Macmillan, 2001. [110] Szuba T. A formal definition of the phenomenon of collective intelligence and its IQ measure. Future Generation Computer Systems, 2001, 17(4): 489-500 doi: 10.1016/S0167-739X(99)00136-3 [111] Wei C, Fan Y M, Chen L, Duan H B. Swam entropy: A quantitative analysis tool for swarm intelligence behaviors. Scientia Sinica Informationis, 2020, 50(3): 335-346 doi: 10.1360/SSI-2019-0191 [112] 陈至杰, 陈建新. 基于社会熵增效应的和谐社会理论初探. 华南理工大学学报(社会科学版), 2007, 9(3): 10−14Chen Zhi-Jie, Chen Jian-Xin. A preliminary study of the theory of building a harmonious society from the perspective of social entropy. Journal of South China University of Technology (Social Science Edition), 2007, 9(3): 10−14 [113] Valavanis K P. The entropy based approach to modeling and evaluating autonomy and intelligence of robotic systems. Journal of Intelligent & Robotic Systems, 2018, 91(1): 7-22 -

 下载:
下载:




计量
- 文章访问数: 3878
- HTML全文浏览量: 2781
- PDF下载量: 1014
- 被引次数: 0
