

Nonlinear Anti-swing Control for Rubber Tyre Container Gantry Crane With Rope Length Variation
-
摘要:
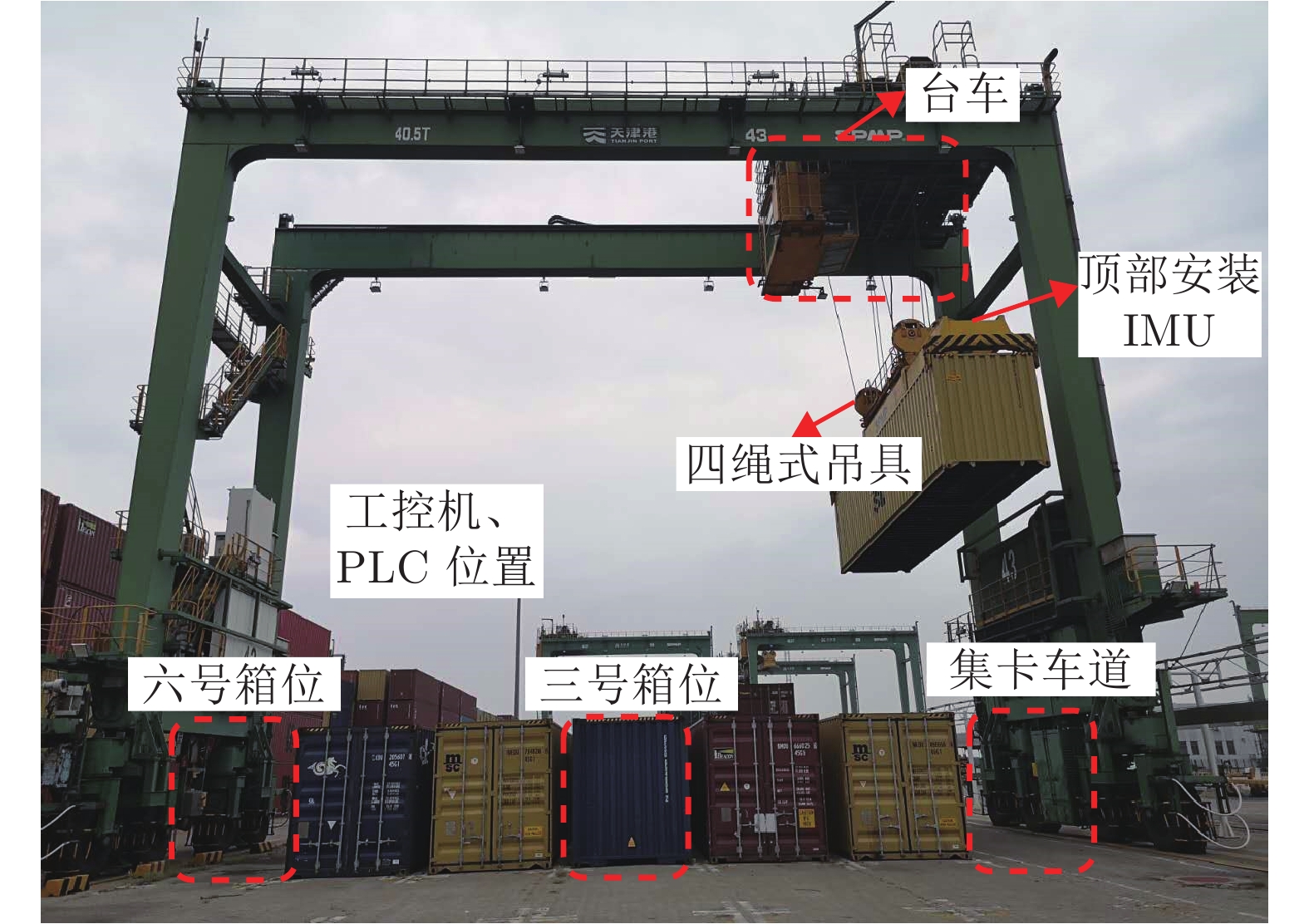
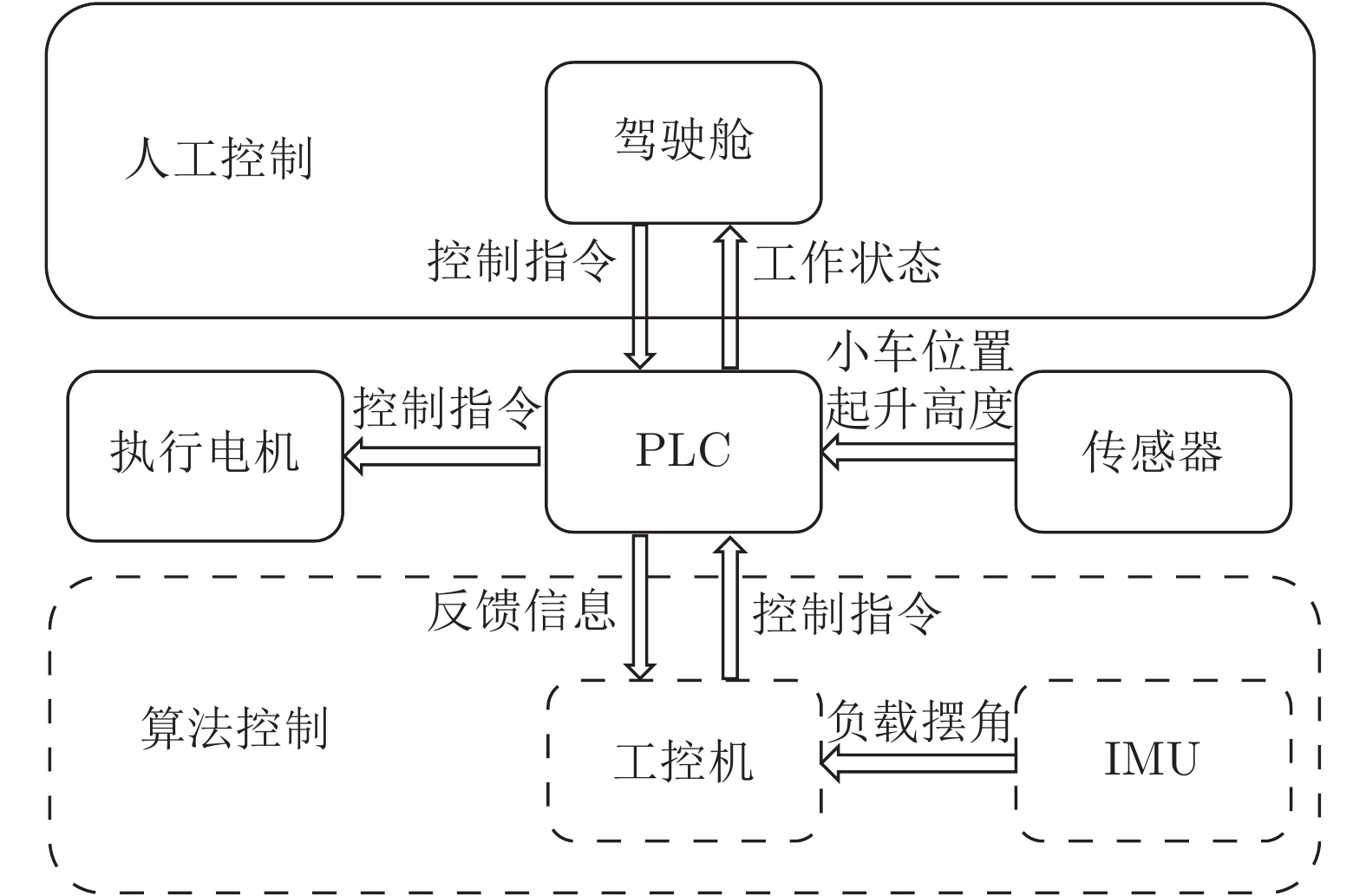
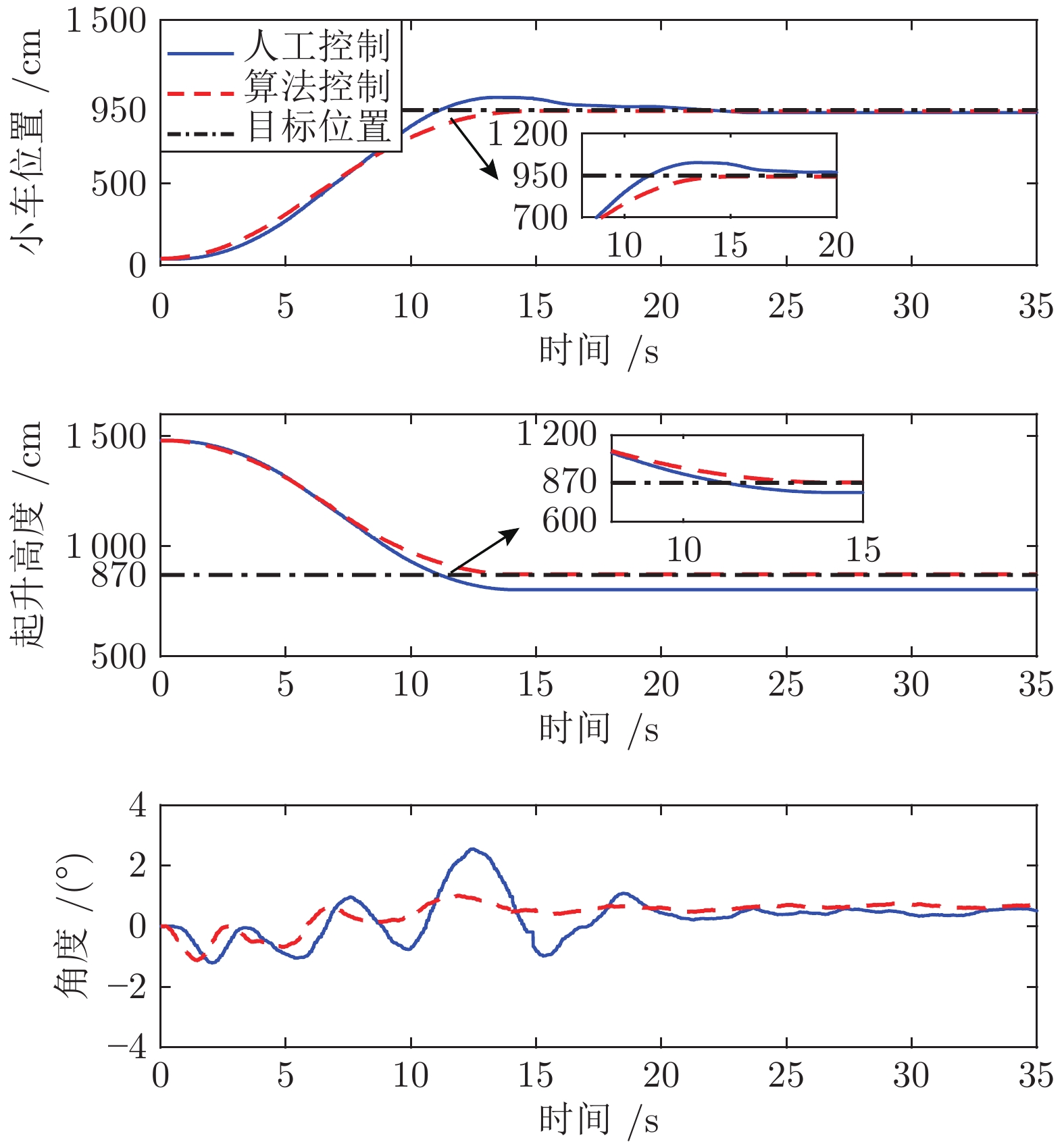
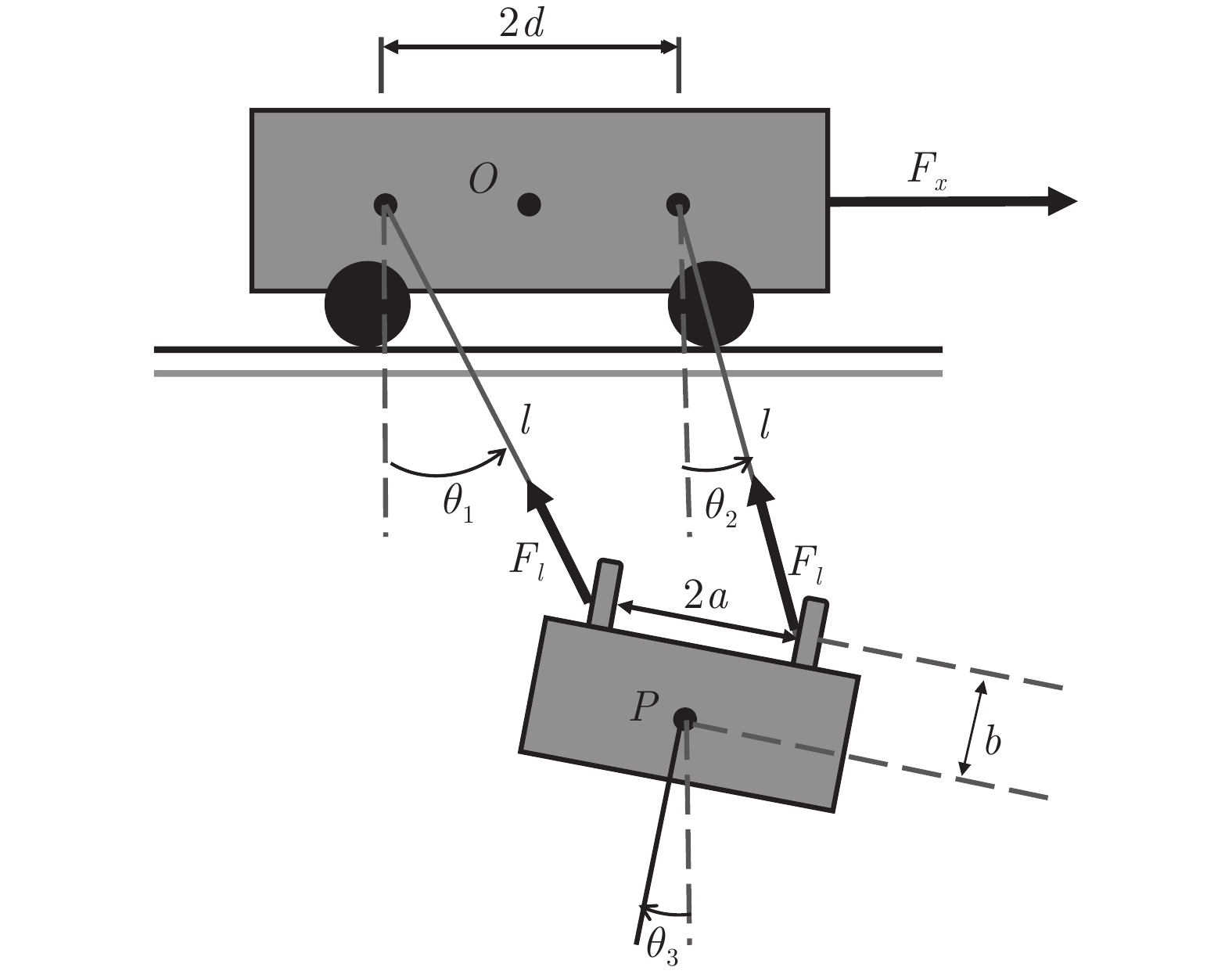
四绳轮胎式集装箱起重机由于自身的动力学特性较为复杂, 目前仍缺乏稳定高效的控制手段. 为解决港口起重机作业过程中台车定位精准度低、负载易受干扰摆幅大的问题, 文章设计了一种面向工业场景的非线性反馈控制器. 首先在未进行近似处理的前提下对起重机吊具摆动情况进行了建模分析. 在此基础上, 通过在控制器中引入摆幅反馈信息, 实现了绳长时变情况下台车的精确定位与负载摆幅的有效抑制, 为集装箱的运送路径增加了更多选择. 随后基于Lyapunov方法对控制器进行了稳定性分析. 所设计的控制方案在港口实际设备上进行了验证, 在定位精度与消摆性能上相较于人工操作取得了很大提升.
Abstract:Due to the complex dynamic characteristics, the four-rope rubber tyre container gantry crane still lacks efficient control strategies. To deal with the problems of poor positioning accuracy and large swing amplitude during the operation, a nonlinear feedback controller for industrial scene is designed in this paper. Specifically, precise modeling of the spreader swing dynamic is first carried out, and then the swing amplitude information is taken into consideration of the controller construction. Based on that, precise positioning and effective swing suppression of the container are accomplished under the circumstances of rope length variation, which provides more selections for container transportation routes. The stability of the desired equilibria is proved with Lyapunov-based analysis, and extensive experiments are carried out on the practical container crane, which obtains much superior control performance than manual operation.
-
Key words:
- Underactuated systems /
- container gantry crane /
- swing suppression /
- nonlinear control
-
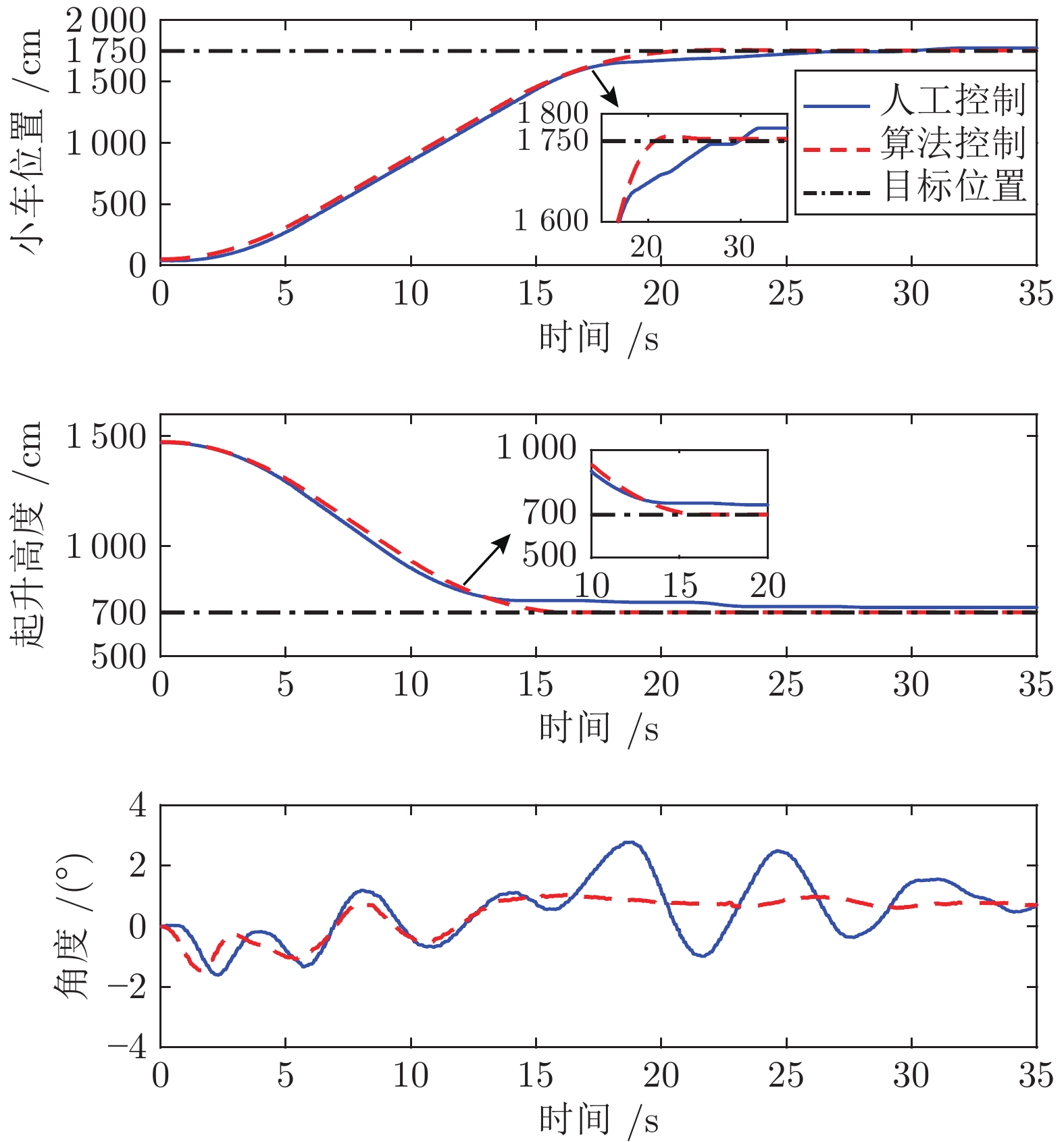
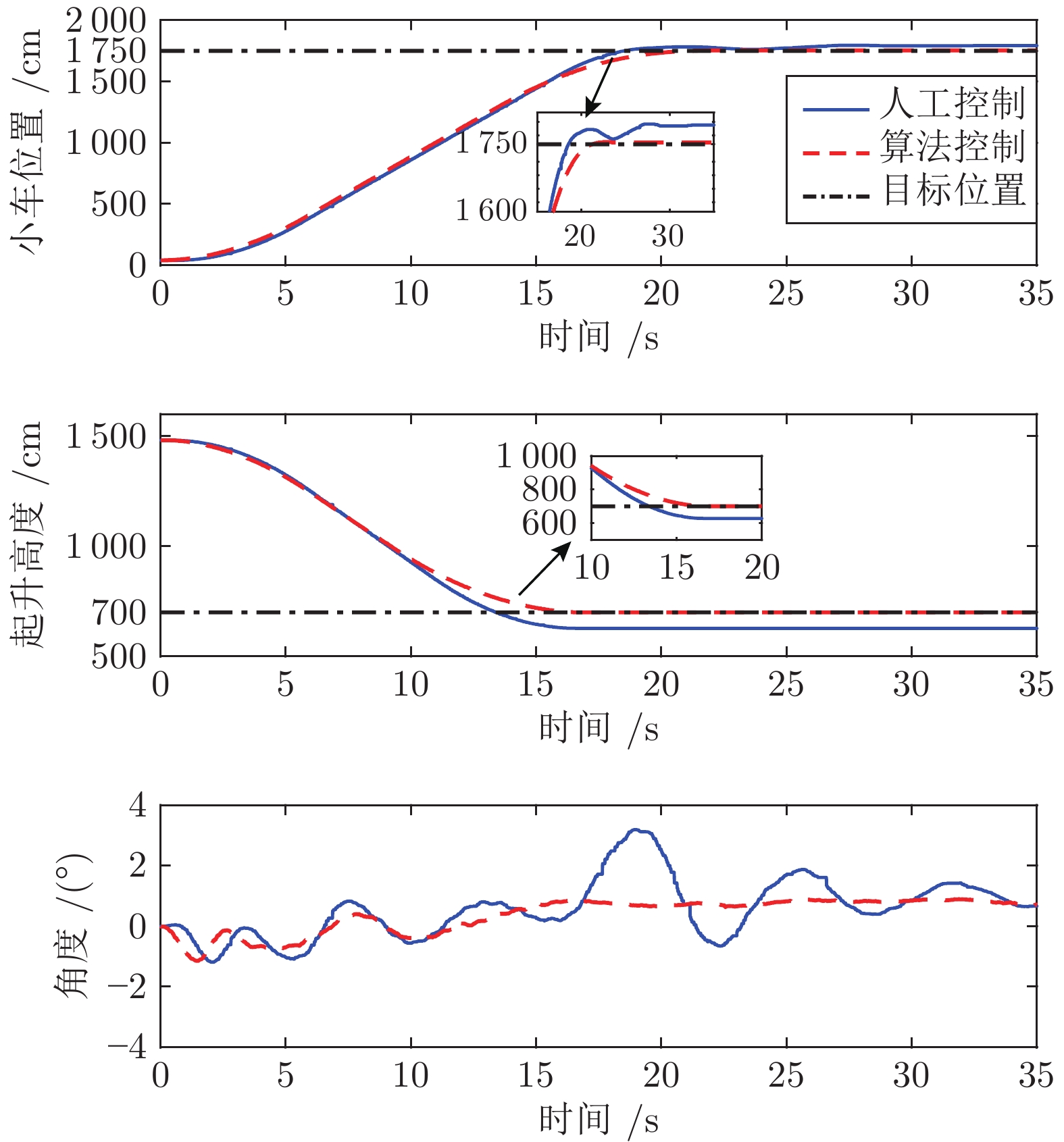
表 1 不同作业模式下数据对比
Table 1 Data comparison of different operation modes
作业模式 台车位置
误差 (cm)起升高度
误差 (cm)最大摆
角 (°)作业用
时 (s)长距离无箱运送 人工控制 24 23 2.6 31.8 算法控制 4 1 1.1 23.9 长距离带箱运送 人工控制 43 73 3.1 32.7 算法控制 4 0 1.4 24.6 短距离带箱运送 人工控制 15 67 2.5 23.8 算法控制 2 2 1.2 17.3  下载: 导出CSV
下载: 导出CSV
-
[1] Wang D, He H, Liu D. Intelligent Optimal Control With Critic Learning for a Nonlinear Overhead Crane System. IEEE Transactions on Industrial Informatics, 2017, 14(07): 2932-2940 [2] Tho H D, Kaneshige A, Terashima K. Minimum-time S-curve commands for vibration-free transportation of an overhead crane with actuator limits. Control Engineering Practice, 2020, 98: 1-12 [3] 刘平, 李国栋, 杨金凤, 刘兴高. 集装箱装卸摆动最优控制快速数值求解算法. 控制理论与应用, 2019, 36(08): 1275-1282Liu Ping, Li Guo-Dong, Yang Jin-Feng, Liu Xing-Gao. Fast Optimal Control Numerical Approach for the Swing Control of Container Load. Control Theory & Applications, 2019, 36(08): 1275-1282 [4] Wu Y M, Sun N, Chen H. Nonlinear time-optimal trajectory planning for varying-rope-length overhead cranes. Assembly Automation, 2018, 38(05): 587-594 doi: 10.1108/AA-12-2017-183 [5] Zhang M H, Ma X, Song R, Rong X W, Tian G H, Tian X C, Li Y B. Adaptive Proportional-Derivative Sliding Mode Control Law With Improved Transient Performance for Underactuated Overhead Crane Systems. IEEE/CAA Journal of Automatica Sinica, 2018, 5(03): 683-690 doi: 10.1109/JAS.2018.7511072 [6] Wang Y S, Xu W M. Synchronous Control of Double-container Overhead Crane Based on PI Terminal Sliding Mode. International Core Journal of Engineering, 2020, 6(05): 133-143 [7] 何博, 方勇纯, 卢彪. 针对输入时滞的桥式起重机鲁棒控制. 自动化学报, 2019, 45(06): 1065-1073He Bo, Fang Yong-Chun, Lu Biao. Robust Control for an Overhead Crane With Input Delay. Acta Automatica Sinica, 2019, 45(06): 1065-1073 [8] Chwa D. Sliding-Mode-Control-Based Robust Finite-Time Antisway Tracking Control of 3-D Overhead Cranes. IEEE Transactions on Industrial Electronics, 2017, 64(08): 6775-6784 doi: 10.1109/TIE.2017.2701760 [9] Zhao Y, Gao H. Fuzzy-Model-Based Control of an Overhead Crane With Input Delay and Actuator Saturation. IEEE Transactions on Fuzzy Systems, 2012, 20(01): 181-186 doi: 10.1109/TFUZZ.2011.2164083 [10] Chen H, Fang Y C, Sun N. A Swing Constraint Guaranteed MPC Algorithm for Underactuated Overhead Cranes. IEEE/ASME Transactions on Mechatronics, 2016, 21(05): 2543-2555 doi: 10.1109/TMECH.2016.2558202 [11] Szpytko, Janusz, Smoczek. Particle Swarm Optimization-Based Multivariable Generalized Predictive Control for an Overhead Crane. IEEE/ASME transactions on mechatronics, 2017, 22(01): 258-268 doi: 10.1109/TMECH.2016.2598606 [12] Wu X, He X. Nonlinear Energy-Based Regulation Control of Three-Dimensional Overhead Cranes. IEEE Transactions on Automation Science & Engineering, 2017, 14(02): 1297-1308 [13] 胡洲, 王志胜, 甄子洋. 带输入饱和的欠驱动吊车非线性信息融合控制. 自动化学报, 2014, 40(07): 1522-1527Hu Zhou, Wang Zhi-Sheng, Zhen Zi-Yang. Nonlinear Information Fusion Control for Underactuated Cranes with Input Saturation. Acta Automatica Sinica, 2014, 40(07): 1522-1527 [14] 何博, 方勇纯, 刘海亮, 孙宁. 桥式起重机精准定位在线轨迹规划方法设计及应用. 控制理论与应用, 2016, 33(10): 1352-1358 doi: 10.7641/CTA.2016.60312He Bo, Fang Yong-Chun, Liu Hai-Liang, Sun Ning. Precise positioning online trajectory planner design and application for overhead cranes. Control Theory & Applications, 2016, 33(10): 1352-1358 doi: 10.7641/CTA.2016.60312 [15] Singhose W, Porter L, Kenison M, Kriikku E. Effects of hoisting on the input shaping control of gantry cranes. Control Engineering Practice, 2000, 8(10): 1159-1165 doi: 10.1016/S0967-0661(00)00054-X [16] Ngo Q H, Hong K S, Jung I H. Adaptive control of an axially moving system. Journal of Mechanical ence and Technology, 2009, 23(11): 3071-3078 [17] Kim C S, Hong K S. Boundary Control of Container Cranes from the Perspective of Controlling an Axially Moving String System. International Journal of Control, Automation, and Systems, 2009, 7(03): 437-445 doi: 10.1007/s12555-009-0313-6 [18] Chwa D, Park M S, Hong S K. Antisway Tracking Control of Overhead Cranes With System Uncertainty and Actuator Nonlinearity Using an Adaptive Fuzzy Sliding-Mode Control. IEEE Transactions on Industrial Electronics, 2008, 55(11): 3972-3984 doi: 10.1109/TIE.2008.2004385 [19] Lu B, Fang Y C, Sun N. Modeling and verification for a four-rope crane. In: Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems. Shenyang, China: IEEE, 2015. 2018−2023 [20] Lu B, Fang Y C, Sun N. Nonlinear control for underactuated multi-rope cranes: modeling, theoretical design and hardware experiments. Control Engineering Practice, 2018, 76: 123-132 doi: 10.1016/j.conengprac.2018.04.005 -

 下载:
下载:

计量
- 文章访问数: 1704
- HTML全文浏览量: 761
- PDF下载量: 243
- 被引次数: 0
