

-
摘要:
目标检测技术是光学遥感图像理解的基础问题, 具有重要的应用价值. 本文对遥感图像目标检测算法发展进行了梳理和分析. 首先阐述了遥感图像目标检测的特点和挑战; 之后系统总结了典型的检测方法, 包括早期的基于手工设计特征的算法和现阶段基于深度学习的方法, 对于深度学习方法首先介绍了典型的目标检测模型, 进而针对遥感图像本身的难点详细梳理了优化改进方案; 接着介绍了常用的检测数据集, 并对现有方法的性能进行比较; 最后对现阶段问题进行总结并对未来发展趋势进行展望.
Abstract:Object detection in optical aerial images is a fundamental problem in the field of remote sensing and shows great importance in the application. The performance of the early hand-craft-feature algorithm is limited, while deep learning is the primary method for object detection at present. However, due to the characteristics of the remote sensing image itself, it is difficult for the existing detection algorithms to perform well on these images. In this paper, we first describe the characteristics and challenges of the object detection task in aerial images. We then summarize the typical detection methods, including early hand-craft feature extraction methods and current deep learning methods, especially for the deep learning algorithm enhancement upon the characteristics of the aerial images. Then the commonly used detection datasets are introduced, and the performances of the existing methods are compared. Finally, we summarize the current deficiencies and analyze the trends of future studies.
-
Key words:
- Remote sensing /
- object detection /
- hand-craft features /
- deep learning /
- dataset
-

图 1 遥感图像目标检测的特点与挑战
Fig. 1 Characteristics and challenges of object detection in remote sensing images
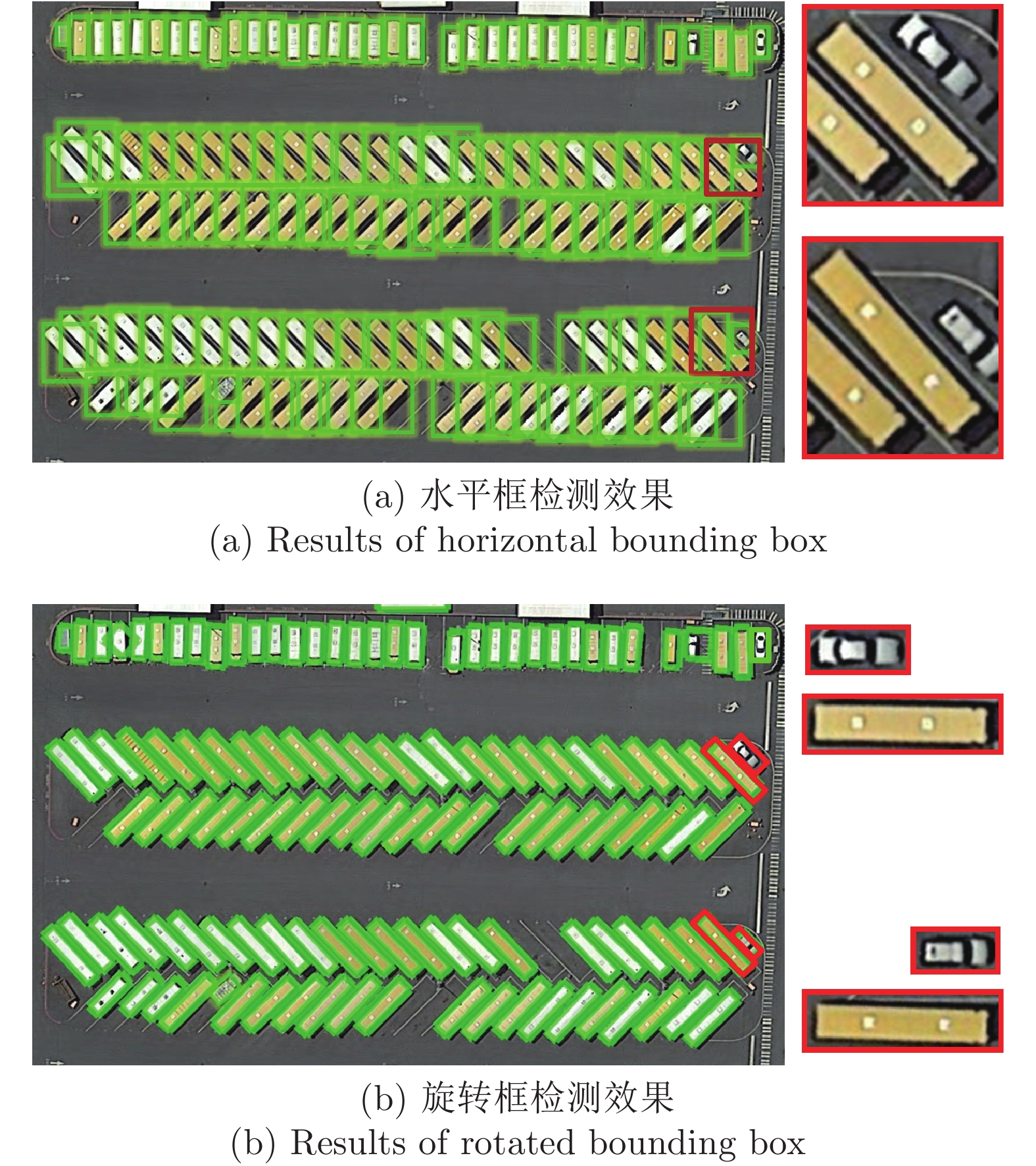
图 3 水平框检测与旋转框检测对比
Fig. 3 Comparison of horizontal detection results and rotated detection results
表 1 水平框检测算法性能对比
Table 1 Performance comparison of horizontal box detection algorithms
算法 主干 改进模块 mAP 超大覆盖 方向多样 尺度过小 密集分布 形状差异 尺度变化 外观模糊 复杂背景 NWPU VHR-10数据集 RICNN[25] AlexNet √ 73.10 R-P-Faster-RCNN[134] VGG-16 76.50 Def.R-FCN[87] Res-101 √ 79.10 Def.Faster-RCNN[88] Res-50 √ √ 84.40 RICADet[111] ZF √ √ 87.12 RDAS512[72] VGG-16 √ √ 89.50 Multi-Scale CNN[98] VGG-16 √ 89.60 CAD-Net[108] Res-101 √ √ 91.50 SCRDet[80] Res-101 √ √ √ √ 91.75 DOTA数据集 FR-H[53] Res-101 √ 60.46 SBL[135] Res-50 √ 64.77 FMSSD[73] VGG-16 √ √ √ 72.43 ICN[84] Res-101 √ √ 72.50 IoU-Adaptive[110] Res-101 √ √ 72.72 EFR[106] VGG-16 √ √ 73.49 SCRDet[80] Res-101 √ √ √ √ √ 75.35 FADet[89] Res-101 √ √ √ √ 75.38 MFIAR-Net t[117] Res-152 √ √ √ 76.07 Mask OBB[105] ResX-101 √ √ √ 76.98 A2RMNet[90] Res-101 √ √ √ 78.45 OWSR[109] Res-101 √ √ √ 78.79 Parallel Cascade R-CNN[101] ResX-101 √ √ √ 78.96 DM-FPN[99] Res-101 √ √ √ 79.27 SCRDet++[82] Res-101 √ √ √ √ √ 79.35  下载: 导出CSV
下载: 导出CSV
表 2 旋转框检测算法性能对比
Table 2 Performance comparison of rotated box detection algorithms
算法 主干 改进模块 mAP 超大覆盖 尺度过小 密集分布 形状差异 尺度变化 外观模糊 复杂背景 边界问题 FR-O[119] Res-101 √ 52.93 IENet[91] Res-101 √ √ √ √ 57.14 TOSO[96] Res-101 √ √ √ 57.52 R-DFPN[83] Res-101 √ √ 57.94 R2CNN[121] Res-101 √ 60.67 RRPN[120] Res-101 √ 61.01 Axis Learning[95] Res-101 √ √ √ 65.98 ICN[84] Res-101 √ √ 68.20 RADet[107] ResX-101 √ √ √ √ √ 69.09 RoI-Transformer[86] Res-101 √ √ 69.56 P-RSDet[92] Res-101 √ √ 69.82 CAD-Net[108] Res-101 √ √ √ 69.90 O2-DNet[93] HG-104 √ √ 71.04 AOOD[103] Res-101 √ √ √ 71.18 Cascade-FF[116] Res-152 √ √ √ √ 71.80 SCRDet[80] Res-101 √ √ √ √ √ √ 72.61 SARD[124] Res-101 √ √ √ 72.95 GLS-Net[118] Res-101 √ √ √ 72.96 DRN[97] HG-104 √ √ 73.23 FADet[89] Res-101 √ √ √ √ 73.28 MFIAR-Net[117] Res-152 √ √ √ 73.49 R3Det[81] Res-152 √ √ √ 73.74 RSDet[126] Res-152 √ √ √ 74.10 Gliding Vertex[123] Res-101 √ √ √ 75.02 Mask OBB[105] ResX-101 √ √ √ √ 75.33 FFA[104] Res-101 √ √ 75.70 APE[94] ResX-101 √ √ √ 75.75 CSL[125] Res-152 √ √ √ 76.17 OWSR[109] Res-101 √ √ √ 76.36 SCRDet++[82] Res-101 √ √ √ √ √ √ 76.81
下载: 导出CSV
-
[1] 王彦情, 马雷, 田原. 光学遥感图像舰船目标检测与识别综述. 自动化学报, 2011, 37(9): 1029-1039Wang Yan-Qing, Ma Lei, Tian Yuan. State-of-the-art of ship detection and recognition in optical remotely sensed imagery. Acta Automatica Sinica, 2011, 37(9): 1029-1039 [2] Cheng G, Han J W. A survey on object detection in optical remote sensing images. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 117: 11-28 doi: 10.1016/j.isprsjprs.2016.03.014 [3] 刘小波, 刘鹏, 蔡之华, 乔禹霖, 王凌, 汪敏. 基于深度学习的光学遥感图像目标检测研究进展. 自动化学报, DOI: 10.16383/j.aas.c190455Liu Xiao-Bo, Liu Peng, Cai Zhi-Hua, Qiao Yu-Lin, Wang Ling, Wang Min. Research progress of optical remote sensing image object detection based on deep learning. Acta Automatica Sinica, DOI: 10.16383/j.aas.c190455 [4] Li K, Wan G, Cheng G, Meng L Q, Han J W. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 159: 296-307 doi: 10.1016/j.isprsjprs.2019.11.023 [5] 张号逵, 李映, 姜晔楠. 深度学习在高光谱图像分类领域的研究现状与展望. 自动化学报, 2018, 44(6): 961-977Zhang Hao-Kui, Li Ying, Jiang Ye-Nan. Deep learning for hyperspectral imagery classification: The state of the art and prospects. Acta Automatica Sinica, 2018, 44(6): 961-977 [6] 隆刚, 陈学佺. 高分辨率遥感图像港内舰船的自动检测方法. 计算机仿真, 2007, 24(5): 198-201 doi: 10.3969/j.issn.1006-9348.2007.05.054Long Gang, Chen Xue-Quan. A method for automatic detection of ships in harbor area in high-resolution remote sensing image. Computer Simulation, 2007, 24(5): 198-201 doi: 10.3969/j.issn.1006-9348.2007.05.054 [7] Antelo J, Ambrosio G, Gonzalez J, Galindo C. Ship detection and recognitionin high-resolution satellite images. In: Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium. Cape Town, South Africa: IEEE, 2009. IV-514-IV-517 [8] Liu G, Zhang Y S, Zheng X W, Sun X, Fu K, Wang H Q. A new method on inshore ship detection in high-resolution satellite images using shape and context information. IEEE Geoscience and Remote Sensing Letters, 2014, 11(3): 617-621 doi: 10.1109/LGRS.2013.2272492 [9] 储昭亮, 王庆华, 陈海林, 徐守时. 基于极小误差阈值分割的舰船自动检测方法. 计算机工程, 2007, 33(11): 239-241, 269 doi: 10.3969/j.issn.1000-3428.2007.11.086Chu Zhao-Liang, Wang Qing-Hua, Chen Hai-Lin, Xu Shou-Shi. Ship auto detection method based on minimum error threshold segmentation. Computer Engineering, 2007, 33(11): 239-241, 269 doi: 10.3969/j.issn.1000-3428.2007.11.086 [10] You X, Li W H. A sea-land segmentation scheme based on statistical model of sea. In: Proceedings of the 4th International Congress on Image and Signal Processing. Shanghai, China: IEEE, 2011. 1155−1159 [11] Otsu N. A threshold selection method from gray-level histograms. IEEE Transactions on Systems, Man, and Cybernetics, 1979, 9(1): 62-66 doi: 10.1109/TSMC.1979.4310076 [12] Liu D H, He L H, Carin L. Airport detection in large aerial optical imagery. In: Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing. Montreal, Canada: IEEE, 2004. Article No. V-761 [13] Tao C, Tan Y H, Cai H J, Tian J W. Airport detection from large IKONOS images using clustered SIFT keypoints and region information. IEEE Geoscience and Remote Sensing Letters, 2011, 8(1): 128-132 doi: 10.1109/LGRS.2010.2051792 [14] Yao X W, Han J W, Guo L, Bu S H, Liu Z B. A coarse-to-fine model for airport detection from remote sensing images using target-oriented visual saliency and CRF. Neurocomputing, 2015, 164: 162-172 doi: 10.1016/j.neucom.2015.02.073 [15] Xu J, Fu K, Sun X. An invariant generalized Hough transform based method of inshore ships detection. In: Proceedings of the 2011 International Symposium on Image and Data Fusion. Tengchong, China: IEEE, 2011. 1−4 [16] Xu J, Sun X, Zhang D B, Fu K. Automatic detection of inshore ships in high-resolution remote sensing images using robust invariant generalized Hough transform. IEEE Geoscience and Remote Sensing Letters, 2014, 11(12): 2070-2074 doi: 10.1109/LGRS.2014.2319082 [17] Harvey N R, Porter R, Theiler J. Ship detection in satellite imagery using rank-order grayscale hit-or-miss transforms. In: Proceedings of SPIE 7701, Visual Information Processing XIX. Orlando, USA: SPIE, 2010. Article No. 770102 [18] Liu G, Sun X, Fu K, Wang H Q. Aircraft recognition in high-resolution satellite images using coarse-to-fine shape prior. IEEE Geoscience and Remote Sensing Letters, 2013, 10(3): 573-577 doi: 10.1109/LGRS.2012.2214022 [19] Zhang Z M, Warrell J, Torr P H S. Proposal generation for object detection using cascaded ranking SVMs. In: Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR 2011). Colorado Springs, USA: IEEE, 2011. 1497−1504 [20] Cheng M M, Zhang Z M, Lin W Y, Torr P. BING: Binarized normed gradients for objectness estimation at 300fps. In: Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Columbus, USA: IEEE, 2014. 3286−3293 [21] Liu Z K, Wang H Z, Weng L B, Yang Y P. Ship rotated bounding box space for ship extraction from high-resolution optical satellite images with complex backgrounds. IEEE Geoscience and Remote Sensing Letters, 2016, 13(8): 1074-1078 doi: 10.1109/LGRS.2016.2565705 [22] Uijlings J R R, Van De Sande K E A, Gevers T, Smeulders A W M. Selective search for object recognition. International Journal of Computer Vision, 2013, 104(2): 154-171 doi: 10.1007/s11263-013-0620-5 [23] Felzenszwalb P F, Huttenlocher D P. Efficient graph-based image segmentation. International Journal of Computer Vision, 2004, 59(2): 167-181 doi: 10.1023/B:VISI.0000022288.19776.77 [24] Cheng G, Zhou P C, Yao X W, Yao C, Zhang Y B, Han J W. Object detection in VHR optical remote sensing images via learning rotation-invariant HOG feature. In: Proceedings of the 4th International Workshop on Earth Observation and Remote Sensing Applications. Guangzhou, China: IEEE, 2016. 433−436 [25] Cheng G, Zhou P C, Han J W. Learning rotation-invariant convolutional neural networks for object detection in VHR optical remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(12): 7405-7415 doi: 10.1109/TGRS.2016.2601622 [26] Song Z N, Sui H G, Wang Y J. Automatic ship detection for optical satellite images based on visual attention model and LBP. In: Proceedings of the 2014 IEEE Workshop on Electronics, Computer and Applications. Ottawa, Canada: IEEE, 2014. [27] Zhang L B, Zhang Y Y. Airport detection and aircraft recognition based on two-layer saliency model in high spatial resolution remote-sensing images. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(4): 1511-1524 doi: 10.1109/JSTARS.2016.2620900 [28] Ding Z H, Yu Y, Wang B, Zhang L M. An approach for visual attention based on biquaternion and its application for ship detection in multispectral imagery. Neurocomputing, 2012, 76(1): 9-17 doi: 10.1016/j.neucom.2011.05.027 [29] Xu F, Liu J H. Ship detection and extraction using visual saliency and histogram of oriented gradient. Optoelectronics Letters, 2016, 12(6): 473-477 doi: 10.1007/s11801-016-6179-y [30] Cucchiara R, Grana C, Piccardi M, Prati A, Sirotti S. Improving shadow suppression in moving object detection with HSV color information. In: Proceedings of the 2001 IEEE Intelligent Transportation Systems (ITSC 2001). Oakland, USA: IEEE, 2001. 334−339 [31] Morillas J R A, García I C, Zölzer U. Ship detection based on SVM using color and texture features. In: Proceedings of the 2015 IEEE International Conference on Intelligent Computer Communication and Processing (ICCP). Cluj-Napoca, Romania: IEEE, 2015. 343−350 [32] Oliva A, Torralba A. Modeling the shape of the scene: A holistic representation of the spatial envelope. International Journal of Computer Vision, 2001, 42(3): 145-175 doi: 10.1023/A:1011139631724 [33] Li Z C, Itti L. Saliency and gist features for target detection in satellite images. IEEE Transactions on Image Processing, 2011, 20(7): 2017-2029 doi: 10.1109/TIP.2010.2099128 [34] Brekke C, Solberg A H S. Oil spill detection by satellite remote sensing. Remote Sensing of Environment, 2005, 95(1): 1-13 doi: 10.1016/j.rse.2004.11.015 [35] Selvi M U, Kumar S S. A novel approach for ship recognition using shape and texture. International Journal of Advanced Information Technology, 2011, 1(5): 23-29 [36] Hsieh J W, Chen J M, Chuang C H, Fan K C. Aircraft type recognition in satellite images. IEE Proceedings-Vision, Image, and Signal Processing, 2005, 152(3): 307-315 doi: 10.1049/ip-vis:20049020 [37] Sun H, Sun X, Wang H Q, Li Y, Li X J. Automatic target detection in high-resolution remote sensing images using spatial sparse coding bag-of-words model. IEEE Geoscience and Remote Sensing Letters, 2012, 9(1): 109-113 doi: 10.1109/LGRS.2011.2161569 [38] Tong S, Sun K, Shi B H, Chen J Y. A ship target automatic recognition method for sub-meter remote sensing images. In: Proceedings of the 4th International Workshop on Earth Observation and Remote Sensing Applications (EORSA). Guangzhou, China: IEEE, 2016. [39] Shi Z W, Yu X R, Jiang Z G, Li B. Ship detection in high-resolution optical imagery based on anomaly detector and local shape feature. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(8): 4511-4523 doi: 10.1109/TGRS.2013.2282355 [40] Gong C, Han J W, Guo L, Qian X L, Zhou P C, Yao X W, et al. Object detection in remote sensing imagery using a discriminatively trained mixture model. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 85: 32-43 doi: 10.1016/j.isprsjprs.2013.08.001 [41] Yin Y Y, Liu N, Li C Y, Wan W B, Fang T. Coarse-to-fine ship detection using visual saliency fusion and feature encoding for optical satellite images. In: Proceedings of the 2016 International Conference on Audio, Language and Image Processing (ICALIP). Shanghai, China: IEEE, 2016. [42] Zhang W C, Sun X, Fu K, Wang C Y, Wang H Q. Object detection in high-resolution remote sensing images using rotation invariant parts based model. IEEE Geoscience and Remote Sensing Letters, 2014, 11(1): 74-78 doi: 10.1109/LGRS.2013.2246538 [43] Li B Y, Cui X G, Bai J. A cascade structure of aircraft detection in high resolution remote sensing images. In: Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). Beijing, China: IEEE, 2016. [44] Zheng J B, Xi Y, Feng M C, Li X X, Li N. Object detection based on BING in optical remote sensing images. In: Proceedings of the 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI). Datong, China: IEEE, 2016. 504−509 [45] Hinz S, Stilla U. Car detection in aerial thermal images by local and global evidence accumulation. Pattern Recognition Letters, 2006, 27(4): 308-315 doi: 10.1016/j.patrec.2005.08.013 [46] Gu W, Lv Z H, Hao M. Change detection method for remote sensing images based on an improved Markov random field. Multimedia Tools and Applications, 2017, 76(17): 17719-17734 doi: 10.1007/s11042-015-2960-3 [47] Hosseini M, Saradjian M, Javahery A, Nadi S. Noise removal from land cover maps by post processing of classification reslts. In: Proceedings of the 3rd International Conference on Recent Advances in Space Technologies. Istanbul, Turkey: IEEE, 2007. [48] Thapa R B, Murayama Y. Urban mapping, accuracy, & image classification: A comparison of multiple approaches in Tsukuba City, Japan. Applied Geography, 2009, 29(1): 135-144 doi: 10.1016/j.apgeog.2008.08.001 [49] O’Donnell T, Goyne K W, Miles R J, Baffaut C, Anderson S H, Sudduth K A. Identification and quantification of soil redoximorphic features by digital image processing. Geoderma, 2010, 157(3-4): 86-96 doi: 10.1016/j.geoderma.2010.03.019 [50] Corbane C, Najman L, Pecoul E, Demagistri L, Petit M. A complete processing chain for ship detection using optical satellite imagery. International Journal of Remote Sensing, 2010, 31(22): 5837-5854 doi: 10.1080/01431161.2010.512310 [51] Zhu X F, Ma C W. The study of combined invariants optimization method on aircraft recognition. In: Proceedings of the 2011 Symposium on Photonics and Optoelectronics (SOPO). Wuhan, China: IEEE, 2011. 1−4 [52] Wang D H, He X, Wei Z H, Yu H L. A method of aircraft image target recognition based on modified PCA features and SVM. In: Proceedings of the 9th International Conference on Electronic Measurement and Instruments. Beijing, China: IEEE, 2009. 4-177−4-181 [53] Ren S Q, He K M, Girshick R, Sun J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149 doi: 10.1109/TPAMI.2016.2577031 [54] Redmon J, Divvala S, Girshick R, Farhadi A. You only look once: Unified, real-time object detection. In: Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Las Vegas, USA: IEEE, 2016. 779−788 [55] Liu W, Anguelov D, Erhan D, Szegedy C, Reed S, Fu C Y, et al. SSD: Single shot MultiBox detector. In: Proceeding of the 14th European Conference on Computer Vision. Amsterdam, The Netherlands: Springer, 2016. 21−37 [56] Law H, Deng J. CornerNet: Detecting objects as paired keypoints. In: Proceedings of the 15th European Conference on Computer Vision (ECCV 2018). Munich, Germany: Springer, 2018. 765−781 [57] Duan K W, Bai S, Xie L X, Qi H G, Huang Q M, Tian Q. CenterNet: Keypoint triplets for object detection. In: Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, Korea: IEEE, 2019. 6568−6577 [58] Tian Z, Shen C H, Chen H, He T. FCOS: Fully convolutional one-stage object detection. In: Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, Korea: IEEE, 2019. 9627−9636 [59] Yan Z G, Song X, Zhong H Y, Zhu X Z. Object detection in optical remote sensing images based on transfer learning convolutional neural networks. In: Proceedings of the 5th IEEE International Conference on Cloud Computing and Intelligence Systems (CCIS). Nanjing, China: IEEE, 2018. 935−942 [60] Yang X, Sun H, Sun X, Yan M L, Guo Z, Fu K. Position detection and direction prediction for arbitrary-oriented ships via multitask Rotation Region Convolutional Neural Network. IEEE Access, 2018, 6: 50839-50849 doi: 10.1109/ACCESS.2018.2869884 [61] He Y Q, Sun X, Gao L R, Zhang B. Ship detection without sea-land segmentation for large-scale high-resolution optical satellite images. In: Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018). Valencia, Spain: IEEE, 2018. 717−720 [62] Fu Y M, Wu F G, Zhao J S. Context-aware and depthwise-based detection on orbit for remote sensing image. In: Proceedings of the 24th International Conference on Pattern Recognition (ICPR). Beijing, China: IEEE, 2018. 1725−1730 [63] Li M J, Guo W W, Zhang Z H, Yu W X, Zhang T. Rotated region based fully convolutional network for ship detection. In: Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018). Valencia, Spain: IEEE, 2018. 673−676 [64] Schilling H, Bulatov D, Niessner R, Middelmann W, Soergel U. Detection of vehicles in multisensor data via multibranch convolutional neural networks. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(11): 4299-4316 doi: 10.1109/JSTARS.2018.2825099 [65] Li X B, Wang S J. Object detection using convolutional neural networks in a coarse-to-fine manner. IEEE Geoscience and Remote Sensing Letters, 2017, 14(11): 2037-2041 doi: 10.1109/LGRS.2017.2749478 [66] Wang C, Bai X, Wang S, Zhou J, Ren P. Multiscale visual attention networks for object detection in VHR remote sensing images. IEEE Geoscience and Remote Sensing Letters, 2019, 16(2): 310-314 doi: 10.1109/LGRS.2018.2872355 [67] Pang J M, Li C, Shi J P, Xu Z H, Feng H J. R2-CNN: Fast tiny object detection in large-scale remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(8): 5512-5524 doi: 10.1109/TGRS.2019.2899955 [68] Van Etten A. You only look twice: Rapid multi-scale object detection in satellite imagery. arXiv preprint arXiv: 1805.09512, 2018 [69] Zhang F, Du B, Zhang L P, Xu M Z. Weakly supervised learning based on coupled convolutional neural networks for aircraft detection. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(9): 5553-5563 doi: 10.1109/TGRS.2016.2569141 [70] Cheng G, Han J W, Zhou P C, Xu D. Learning rotation-invariant and fisher discriminative convolutional neural networks for object detection. IEEE Transactions on Image Processing, 2019, 28(1): 265-278 doi: 10.1109/TIP.2018.2867198 [71] Wu X, Hong D F, Tian J J, Chanussot J, Li W, Tao R. ORSIm detector: A novel object detection framework in optical remote sensing imagery using spatial-frequency channel features. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(7): 5146-5158 doi: 10.1109/TGRS.2019.2897139 [72] Chen S Q, Zhan R H, Zhang J. Geospatial object detection in remote sensing imagery based on multiscale single-shot detector with activated semantics. Remote Sensing, 2018, 10(6): Article No. 820 doi: 10.3390/rs10060820 [73] Wang P J, Sun X, Diao W H, Fu K. FMSSD: Feature-merged single-shot detection for multiscale objects in large-scale remote sensing imagery. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(5): 3377-3390 doi: 10.1109/TGRS.2019.2954328 [74] Zhang W, Wang S H, Thachan S, Chen J Z, Qian Y T. Deconv R-CNN for small object detection on remote sensing images. In: Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018). Valencia, Spain: IEEE, 2018. 2483−2486 [75] Liu W C, Ma L, Wang J, Chen H. Detection of multiclass objects in optical remote sensing images. IEEE Geoscience and Remote Sensing Letters, 2019, 16(5): 791-795 doi: 10.1109/LGRS.2018.2882778 [76] Ying X, Wang Q, Li X W, Yu M, Jiang H, Gao J, et al. Multi-attention object detection model in remote sensing images based on multi-scale. IEEE Access, 2019, 7: 94508-94519 doi: 10.1109/ACCESS.2019.2928522 [77] Long H, Chung Y, Liu Z B, Bu S H. Object detection in aerial images using feature fusion deep networks. IEEE Access, 2019, 7: 30980-30990 doi: 10.1109/ACCESS.2019.2903422 [78] Cheng L, Liu X, Li L L, Jiao L C, Tang X. Deep adaptive proposal network for object detection in optical remote sensing images. arXiv preprint arXiv: 1807.07327, 2018 [79] Long Y, Gong Y P, Xiao Z F, Liu Q. Accurate object localization in remote sensing images based on convolutional neural networks. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(5): 2486-2498 doi: 10.1109/TGRS.2016.2645610 [80] Yang X, Yang J R, Yan J C, Zhang Y, Zhang T F, Guo Z, et al. SCRDet: Towards more robust detection for small, cluttered and rotated objects. In: Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Seoul, Korea: IEEE, 2019. 8232−8241 [81] Yang X, Liu Q Q, Yan J C, Li A. R3Det: Refined single-stage detector with feature refinement for rotating object. In: Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021. [82] Yang X, Yan J C, Yang X K, Tang J, Liao W L, He T. SCRDet++: Detecting small, cluttered and rotated objects via instance-level feature denoising and rotation loss smoothing. arXiv preprint arXiv: 2004.13316, 2020 [83] Yang X, Sun H, Fu K, Yang J R, Su X, Yan M L, et al. Automatic ship detection in remote sensing images from Google earth of complex scenes based on multiscale rotation dense feature pyramid networks. Remote Sensing, 2018, 10(1): Article No. 132 doi: 10.3390/rs10010132 [84] Azimi S M, Vig E, Bahmanyar R, Körner M, Reinartz P. Towards multi-class object detection in unconstrained remote sensing imagery. In: Proceedings of the 14th Asian Conference on Computer Vision (ACCV 2018). Perth, Australia: Springer, 2018. 150−165 [85] Wang X B, Jiang Y Y, Luo Z B, Liu C L, Choi H, Kim S. Arbitrary shape scene text detection with adaptive text region representation. In: Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 6449−6458 [86] Ding J, Xue N, Long Y, Xia G S, Lu Q K. Learning RoI transformer for oriented object detection in aerial images. In: Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 2844−2853 [87] Xu Z Z, Xu X, Wang L, Yang R, Pu F L. Deformable ConvNet with aspect ratio constrained NMS for object detection in remote sensing imagery. Remote Sensing, 2017, 9(12): Article No. 1312 doi: 10.3390/rs9121312 [88] Ren Y, Zhu C R, Xiao S P. Deformable Faster R-CNN with aggregating multi-layer features for partially occluded object detection in optical remote sensing images. Remote Sensing, 2018, 10(9): Article No. 1470 doi: 10.3390/rs10091470 [89] Li C Z, Xu C Y, Cui Z, Wang D, Zhang T, Yang J. Feature-attentioned object detection in remote sensing imagery. In: Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP). Taipei, China: IEEE, 2019. 3886−3890 [90] Qiu H Q, Li H L, Wu Q B, Meng F M, Ngan K N, Shi H C. A2RMNet: Adaptively aspect ratio multi-scale network for object detection in remote sensing images. Remote Sensing, 2019, 11(13): Article No. 1594 doi: 10.3390/rs11131594 [91] Lin Y T, Feng P M, Guan J, Wang W W, Chambers J. IENet: Interacting embranchment one stage anchor free detector for orientation aerial object detection. arXiv preprint arXiv: 1912.00969, 2019 [92] Zhou L, Wei H R, Li H, Zhang Y, Sun X, Zhao W Z. Objects detection for remote sensing images based on polar coordinates. arXiv preprint arXiv: 2001.02988, 2020 [93] Wei H R, Zhang Y, Chang Z H, Li H, Wang H Q, Sun X. Oriented objects as pairs of middle lines. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 169: 268-279 doi: 10.1016/j.isprsjprs.2020.09.022 [94] Zhu Y X, Du J, Wu X Q. Adaptive period embedding for representing oriented objects in aerial images. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(10): 7247-7257 doi: 10.1109/TGRS.2020.2981203 [95] Xiao Z F, Qian L J, Shao W P, Tian X W, Wang K. Axis learning for orientated objects detection in aerial images. Remote Sensing, 2020, 12(6): Article No. 908 doi: 10.3390/rs12060908 [96] Feng P M, Lin Y T, Guan J J, He G J, Shi H F, Chambers J. TOSO: Student' s-T distribution aided one-stage orientation target detection in remote sensing images. In: Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2020). Barcelona, Spain: IEEE, 2020. 4057−4061 [97] Pan X J, Ren Y Q, Sheng K K, Dong W M, Yuan H L, Guo X W, et al. Dynamic refinement network for oriented and densely packed object detection. In: Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 11207−11216 [98] Guo W, Yang W, Zhang H J, Hua G. Geospatial object detection in high resolution satellite images based on multi-scale convolutional neural network. Remote Sensing, 2018, 10(1): Article No. 131 doi: 10.3390/rs10010131 [99] Zhang X D, Zhu K, Chen G Z, Tan X L, Zhang L F, Dai F, et al. Geospatial object detection on high resolution remote sensing imagery based on double multi-scale feature pyramid network. Remote Sensing, 2019, 11(7): Article No. 755 doi: 10.3390/rs11070755 [100] Zhang S, He G H, Chen H B, Jing N F, Wang Q. Scale adaptive proposal network for object detection in remote sensing images. IEEE Geoscience and Remote Sensing Letters, 2019, 16(6): 864-868 doi: 10.1109/LGRS.2018.2888887 [101] Hou J Y, Ma H B, Wang S J. Parallel cascade R-CNN for object detection in remote sensing imagery. Journal of Physics: Conference Series, 2020, 1544: Article No. 012124 [102] Lin T Y, Dollár P, Girshick R, He K M, Hariharan B, Belongie S. Feature pyramid networks for object detection. In: Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Honolulu, USA: IEEE, 2017. 2117−2125 [103] Zou F H, Xiao W, Ji W T, He K K, Yang Z X, Song J K, et al. Arbitrary-oriented object detection via dense feature fusion and attention model for remote sensing super-resolution image. Neural Computing and Applications, 2020, 32(18): 14549-14562 doi: 10.1007/s00521-020-04893-9 [104] Fu K, Chang Z H, Zhang Y, Xu G L, Zhang K S, Sun X. Rotation-aware and multi-scale convolutional neural network for object detection in remote sensing images. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 161: 294-308 doi: 10.1016/j.isprsjprs.2020.01.025 [105] Wang J W, Ding J, Guo H W, Cheng W S, Pan T, Yang W. Mask OBB: A semantic attention-based mask oriented bounding box representation for multi-category object detection in aerial images. Remote Sensing, 2019, 11(24): Article No. 2930 doi: 10.3390/rs11242930 [106] Fu K, Chen Z, Zhang Y, Sun X. Enhanced feature representation in detection for optical remote sensing images. Remote Sensing, 2019, 11(18): Article No. 2095 doi: 10.3390/rs11182095 [107] Li Y Y, Huang Q, Pei X, Jiao L C, Shang R H. RADet: Refine feature pyramid network and multi-layer attention network for arbitrary-oriented object detection of remote sensing images. Remote Sensing, 2020, 12(3): Article No. 389 doi: 10.3390/rs12030389 [108] Zhang G J, Lu S J, Zhang W. CAD-Net: A context-aware detection network for objects in remote sensing imagery. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(12): 10015-10024 doi: 10.1109/TGRS.2019.2930982 [109] Xu C Y, Li C Z, Cui Z, Zhang T, Yang J. Hierarchical semantic propagation for object detection in remote sensing imagery. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(6): 4353-4364 doi: 10.1109/TGRS.2019.2963243 [110] Yan J Q, Wang H Q, Yan M L, Diao W H, Sun X, Li H. IoU-adaptive deformable R-CNN: Make full use of IoU for multi-class object detection in remote sensing imagery. Remote Sensing, 2019, 11(3): Article No. 286 doi: 10.3390/rs11030286 [111] Li K, Cheng G, Bu S H, You X. Rotation-insensitive and context-augmented object detection in remote sensing images. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(4): 2337-2348 doi: 10.1109/TGRS.2017.2778300 [112] Chen C Y, Gong W G, Chen Y L, Li W H. Object detection in remote sensing images based on a scene-contextual feature pyramid network. Remote Sensing, 2019, 11(3): Article No. 339 doi: 10.3390/rs11030339 [113] Ma W P, Guo Q Q, Wu Y, Zhao W, Zhang X R, Jiao L C. A novel multi-model decision fusion network for object detection in remote sensing images. Remote Sensing, 2019, 11(7): Article No. 737 doi: 10.3390/rs11070737 [114] Zhang Y K, You Y N, Wang R, Liu F, Liu J. Nearshore vessel detection based on Scene-mask R-CNN in remote sensing image. In: Proceedings of the 2018 International Conference on Network Infrastructure and Digital Content (IC-NIDC). Guiyang, China: IEEE, 2018. 76−80 [115] Li Q P, Mou L C, Jiang K Y, Liu Q J, Wang Y H, Zhu X X. Hierarchical region based convolution neural network for multiscale object detection in remote sensing images. In: Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018). Valencia, Spain: IEEE, 2018. 4355−4358 [116] Hou L P, Lu K, Xue J, Hao L. Cascade detector with feature fusion for arbitrary-oriented objects in remote sensing images. In: Proceedings of the 2020 IEEE International Conference on Multimedia and Expo (ICME). London, UK: IEEE, 2020. 1−6 [117] Yang F, Li W T, Hu H W, Li W Y, Wang P. Multi-scale feature integrated attention-based rotation network for object detection in VHR aerial images. Sensors, 2020, 20(6): Article No. 1686 doi: 10.3390/s20061686 [118] Li C Y, Luo B, Hong H L, Su X, Wang Y J, Liu J, et al. Object detection based on global-local saliency constraint in aerial images. Remote Sensing, 2020, 12(9): Article No. 1435 doi: 10.3390/rs12091435 [119] Xia G S, Bai X, Ding J, Zhu Z, Belongie S, Luo J B, et al. DOTA: A large-scale dataset for object detection in aerial images. In: Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, USA: IEEE, 2018. 3974−3983 [120] Ma J Q, Shao W Y, Ye H, Wang L, Wang H, Zheng Y B, et al. Arbitrary-oriented scene text detection via rotation proposals. IEEE Transactions on Multimedia, 2018, 20(11): 3111-3122 doi: 10.1109/TMM.2018.2818020 [121] Jiang Y Y, Zhu X Y, Wang X B, Yang S L, Li W, Wang H, et al. R2CNN: Rotational region CNN for orientation robust scene text detection. arXiv preprint arXiv: 1706.09579, 2017 [122] Cao L, Zhang X, Wang Z, et al. Multi angle rotation object detection for remote sensing image based on modified feature pyramid networks. International Journal of Remote Sensing, 2021: 5253−5276 [123] Xu Y C, Fu M T, Wang Q M, Wang Y K, Chen K, Xia G S, et al. Gliding vertex on the horizontal bounding box for multi-oriented object detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(4): 1452-1459 doi: 10.1109/TPAMI.2020.2974745 [124] Wang Y S, Zhang Y, Zhang Y, Zhao L J, Sun X, Guo Z. SARD: Towards scale-aware rotated object detection in aerial imagery. IEEE Access, 2019, 7: 173855-173865 doi: 10.1109/ACCESS.2019.2956569 [125] Yang X, Yan J C. Arbitrary-oriented object detection with circular smooth label. In: Proceedings of the 16th European Conference on Computer Vision (ECCV 2020). Glasgow, UK: Springer, 2020. 677−694 [126] Qian W, Yang X, Peng S L, Guo Y, Yan J C. Learning modulated loss for rotated object detection. In: Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021. [127] Heitz G, Koller D. Learning spatial Context: Using stuff to find things. In: Proceedings of the 10th European Conference on Computer Vision (ECCV 2008). Marseille, France: Springer, 2008. 30−43 [128] Maggiori E, Tarabalka Y, Charpiat G, Alliez P. Can semantic labeling methods generalize to any city? The inria aerial image labeling benchmark. In: Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). Fort Worth, USA: IEEE, 2017. 3226−3229 [129] Cheng G, Han J W, Zhou P C, Guo L. Multi-class geospatial object detection and geographic image classification based on collection of part detectors. ISPRS Journal of Photogrammetry and Remote Sensing, 2014, 98: 119-132 doi: 10.1016/j.isprsjprs.2014.10.002 [130] Razakarivony S, Jurie F. Vehicle detection in aerial imagery: A small target detection benchmark. Journal of Visual Communication and Image Representation, 2016, 34: 187-203 doi: 10.1016/j.jvcir.2015.11.002 [131] Zhu H G, Chen X G, Dai W Q, Fu K, Ye Q X, Jiao J B. Orientation robust object detection in aerial images using deep convolutional neural network. In: Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP). Quebec City, Canada: IEEE, 2015. 3735−3739 [132] Liu K, Mattyus G. Fast multiclass vehicle detection on aerial images. IEEE Geoscience and Remote Sensing Letters, 2015, 12(9): 1938-1942 doi: 10.1109/LGRS.2015.2439517 [133] Liu Z K, Yuan L, Weng L B, Yang Y P. A high resolution optical satellite image dataset for ship recognition and some new baselines. In: Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017). Porto, Portugal: SciTe Press, 2017. 324−331 [134] Han X B, Zhong Y F, Zhang L P. An efficient and robust integrated geospatial object detection framework for high spatial resolution remote sensing imagery. Remote Sensing, 2017, 9(7): Article No. 666 doi: 10.3390/rs9070666 [135] Sun P, Chen G, Shang Y. Adaptive saliency biased loss for object detection in aerial images. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(10): 7154-7165 doi: 10.1109/TGRS.2020.2980023 -

 下载:
下载:



计量
- 文章访问数: 7696
- HTML全文浏览量: 6010
- PDF下载量: 1889
- 被引次数: 0
