

Target Fencing Control of Multiple Mobile Robots Using Output Feedback Linearization
-
摘要: 针对受非完整约束的多移动机器人系统的移动目标包围控制问题, 提出一种基于输出反馈线性化的局部协同控制方法. 利用机器人与邻居节点和目标的相对距离信息、角度信息以及机器人自身的方位角信息设计协同控制器. 该方法无需事先指定包围编队形状, 可实现对移动目标的速度估计, 且保证机器人之间的障碍规避. 严格的理论分析证明了移动目标指数收敛到多移动机器人构成的凸包内部. 最后, 仿真结果验证了所提控制方法的有效性.Abstract: In this paper, we focus on a moving-target-fencing problem for a group of mobile robots with nonholonomic constraints. A local cooperative control law is proposed based on output feedback linearization. The proposed control law uses the relative angle and distance measurements from the target and its neighbors, as well as the bearing angle itself. This control law does not need to predefine a fencing formation, and it can assure the estimation for unknown target's velocity and collision avoidance. It is rigorously proved that the proposed control law ensures that the moving target is exponentially fenced into the convex hull of multiple robots. Finally, numerical simulations verify the effectiveness of the proposed control law.
-
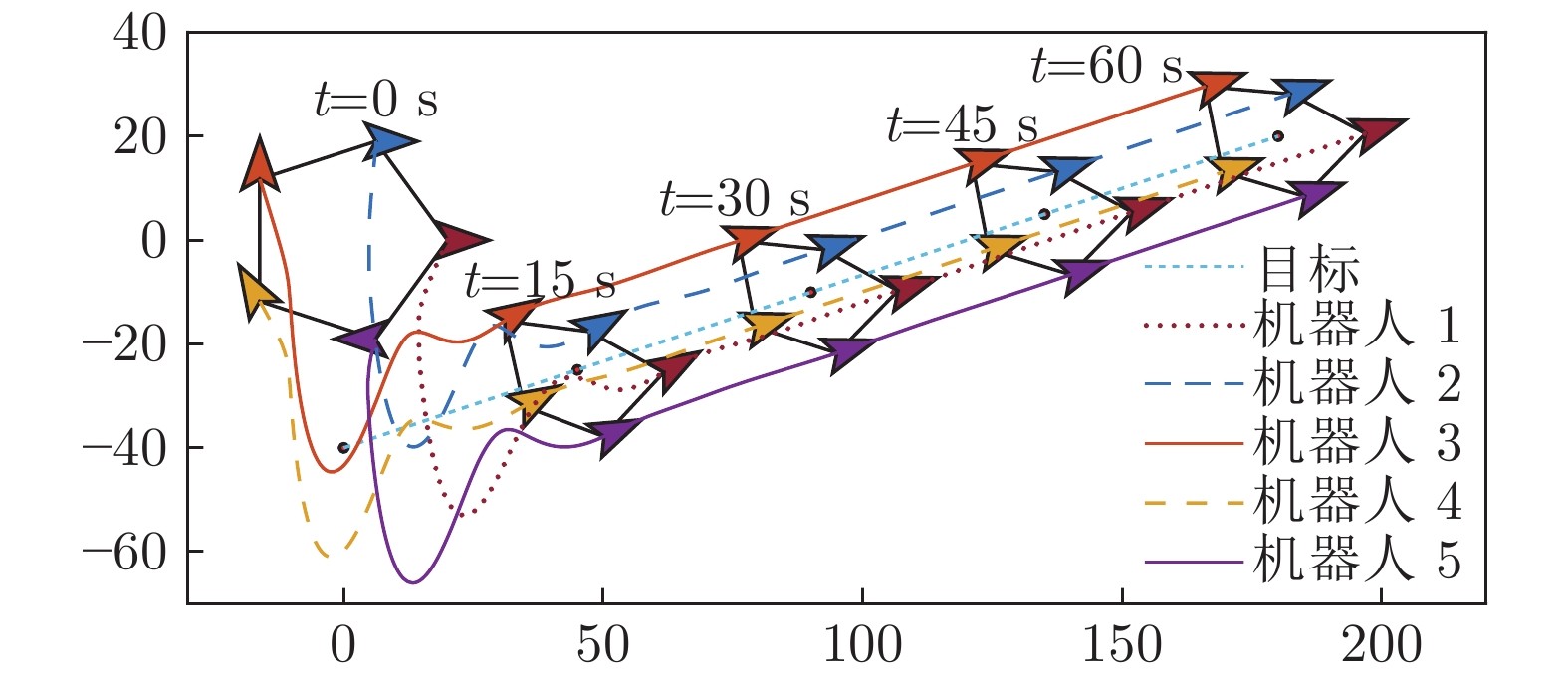
图 2 目标包围控制中多移动机器人的轨迹
Fig. 2 Trajectories of multiple mobile robots during target fencing control
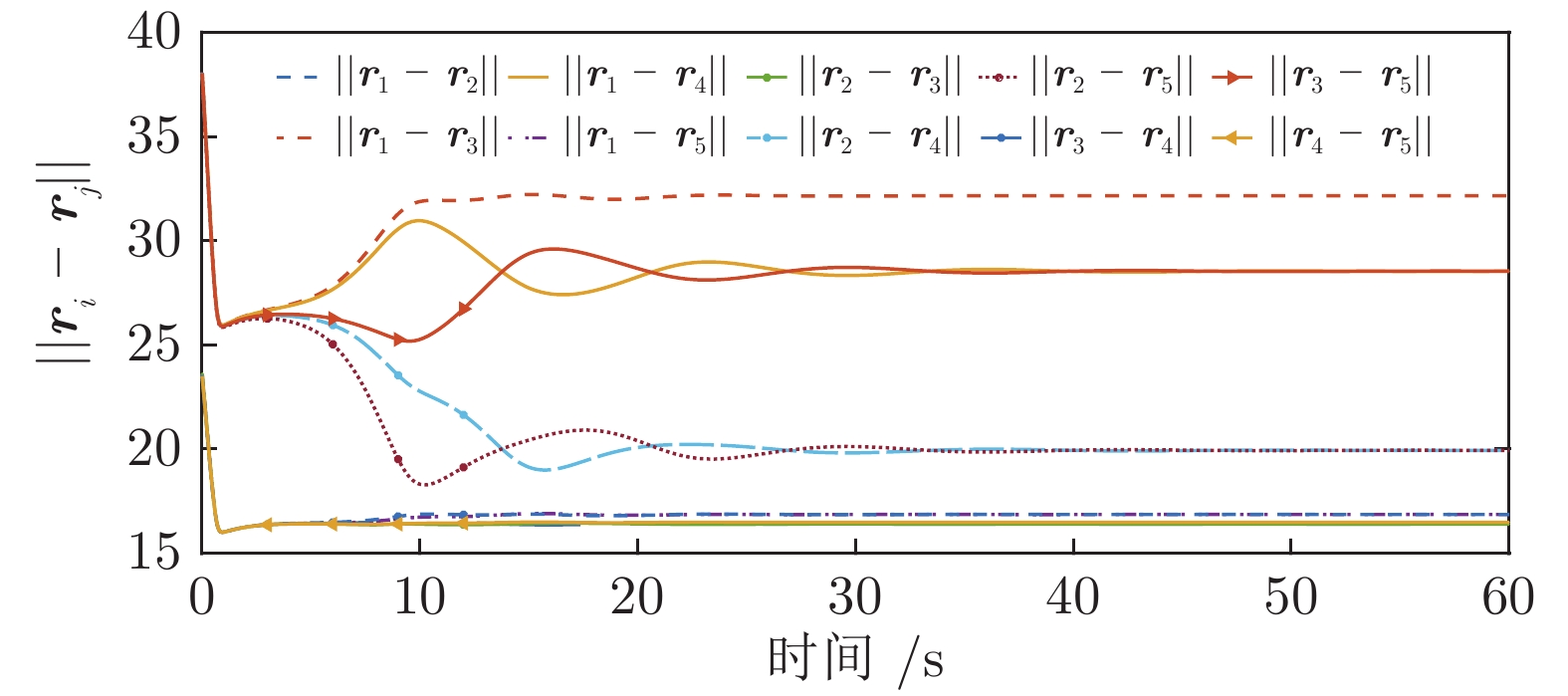
图 4 机器人
$i$ 和$j$ 之间的相对距离Fig. 4 Time evolution of the relative distance between robot
$i$ and robot$j$ -
[1] 洪奕光, 翟超. 多智能体系统动态协调与分布式控制设计. 控制理论与应用, 2011, 28(10): 1506-1512.Hong Yi-Guang, Zhai Chao. Dynamic coordination and distributed control design of multi-agent systems. Control Theory & Application, 2011, 28(10): 1506-1512. [2] Knorn S, Chen Z Y, Middleton R H. Overview: Collective control of multiagent systems. IEEE Transactions on Control of Network Systems, 2016, 3(4): 334-347. doi: 10.1109/TCNS.2015.2468991 [3] 李玉玲, 杨洪勇, 刘凡, 杨怡泽. 带有不匹配干扰的二阶多自主体系统有限时间包容控制. 自动化学报, 2019, 45(9): 1783-1790.Li Yu-Ling, Yang Hong-Yong, Liu Fan, Yang Yi-Ze. Finite-time containment control of second-order multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(9): 1783-1790. [4] 刘娟, 张皓, 王祝萍. 基于自触发的异构多智能体协同输出调节. 自动化学报, 2019, 45(10): 1893-1902.Liu Juan, Zhang Hao, Wang Zhu-Ping. Cooperative output regulation of heterogeneous multi-agent systems by self-triggered. Acta Automatica Sinica, 2019, 45(10): 1893-1902. [5] 刘凡, 杨洪勇, 杨怡泽, 李玉玲, 刘远山. 带有不匹配干扰的多智能体系统有限时间积分滑模控制. 自动化学报, 2019, 45(4): 749-758.Liu Fan, Yang Hong-Yong, Yang Yi-Ze, Li Yu-Ling, Liu Yuan-Shan. Finite-time integral sliding mode control for multi-agent systems with mismatched disturbances. Acta Automatica Sinica, 2019, 45(4): 749-758. [6] Huang Y, Duan M M, Mo L P. Multiagent containment control with nonconvex states constraints, nonuniform time delays, and switching directed networks. IEEE Transactions on Neural Networks and Learning Systems, 2019, 31(11): 5021-5028. [7] 金尚泰, 李澈, 任叶, 侯忠生. 未知异构非线性多智能体系统的无模型自适应编队控制述. 控制与决策, 2020, 35(6): 1519-1524.Jin Shang-Tai, Li Che, Ren Ye, Hou Zhong-Sheng. Model-free adaptive formation control for unknown heterogeneous nonlinear multi-agent systems. Control and Decision, 2020, 35(6): 1519-1524. [8] Chen F, Ren W, Cao Y C. Surrounding control in cooperative agent networks. Systems & Control Letters, 2010, 59(11): 704-712. [9] Lou Y C, Hong Y G. Distributed surrounding design of target region with complex adjacency matrices. IEEE Transactions on Automatic Control. 2015, 60(1): 283-288. doi: 10.1109/TAC.2014.2322917 [10] Brockett R W. Differential Geometric Control Theory. Massachusetts: Birkhauser, 1983. 181−191 [11] Yamamoto Y, Yun X. Coordinating locomotion and manipulation of a mobile manipulator. IEEE Transactions on Automatic Control. 1994, 39(6): 1326-1332. doi: 10.1109/9.293207 [12] Arranz L, Seuret A, Pascoal A. Circular formation control for cooperative target tracking with limited information. Journal of the Franklin Institute, 2019, 356(4): 1771-1788. doi: 10.1016/j.jfranklin.2018.12.011 [13] Paliotta C, Lefeber E, Pettersen K Y, Pinto J, Costa M, de Figueiredo Borges de Sousa J T. Trajectory tracking and path following for underactuated marine vehicles. IEEE Transactions on Control Systems Technology, 2019, 27(4): 1423-1437. doi: 10.1109/TCST.2018.2834518 [14] Chen Z Y, Zhang H T. A remark on collective circular motion of jointly connected multi-agents. Automatica, 2011, 47(9): 1929-1937. doi: 10.1016/j.automatica.2011.03.012 [15] Yu X, Liu L, Feng G. Distributed circular formation control of nonholonomic vehicles without direct distance measurements. IEEE Transactions on Automatic Control, 2018, 63(8): 2730-2737. doi: 10.1109/TAC.2018.2790259 [16] Lan Y, Yan G F, Lin Z Y. Distributed control of cooperative target enclosing based on reachability and invariance analysis. Systems & Control Letters, 2010, 59(7): 381-389. [17] Frew E W, Lawrence D A, Morris S. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields. Journal of Guidance, Control, and Dynamics, 2008, 31(2): 290-306. [18] Yu X, Liu L. Cooperative control for moving-target circular formation of nonholonomic vehicles. IEEE Transactions on Automatic Control, 2017, 62(7): 3448-3454. doi: 10.1109/TAC.2016.2614348 [19] Chen Z Y. A cooperative target-fencing protocol of multiple vehicles. Automatica, 2019, 107: 591-594. doi: 10.1016/j.automatica.2019.05.034 [20] Isidori A. Nonlinear Control Systems. New York: Springer-Verlag, 1989. 147−161 [21] Slotine J J E, Li W P. Applied Nonlinear Control. New Jersey: Prentice-Hall, 1991. 100−156 -

 下载:
下载:







图(7)
计量
- 文章访问数: 1112
- HTML全文浏览量: 694
- PDF下载量: 333
- 被引次数: 0
