

-
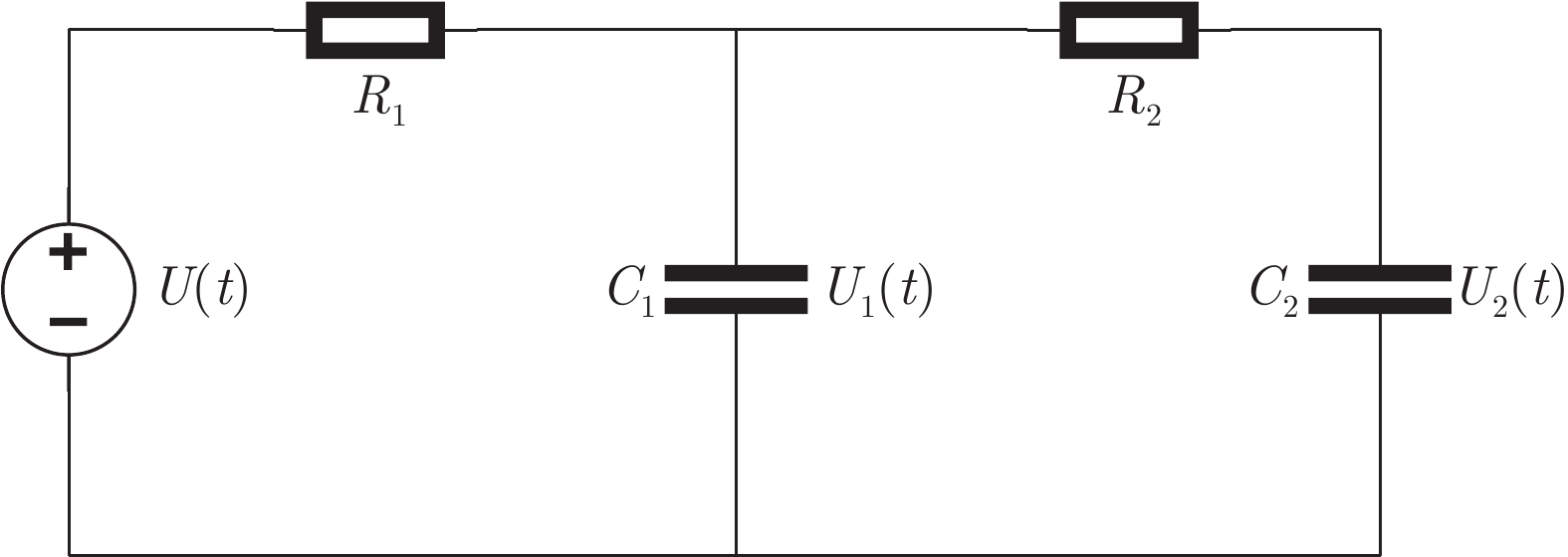
摘要: 针对具有未知扰动与测量噪声的线性离散时间系统, 提出了一种传感器故障检测方法. 首先, 将传感器故障视为增广状态, 将原始系统转化为一个等效的新线性动态系统. 然后, 基于鲁棒观测器设计和极点配置方法构造了一个故障检测观测器, 使得生成的残差能够同时满足对扰动与噪声的鲁棒性和对故障的敏感性. 此外, 设计了一种基于椭球分析的残差评价方法, 该方法可通过判断残差是否被无故障残差椭球包含来检测故障. 最后, 通过一个二阶RC电路模型的仿真算例验证了所提出方法的有效性与优越性.Abstract: This paper proposes a sensor fault detection approach for linear discrete-time system with unknown disturbances and measurement noises. A new linear dynamic system, which is equivalent to the original system, is obtained by considering the fault as an auxiliary state. To make the generated residual robust to disturbances and noises, and sensitive to fault, a fault detection observer is constructed based on the robust observer design and pole assignment techniques. Moreover, a residual evaluation method via ellipsoidal analysis is proposed, which can detect fault by checking whether the residual is included by the fault-free residual ellipsoid. Finally, numerical simulation of a second-order RC circuit model is given to illustrate the effectiveness and superiority of the proposed approach.
-
Key words:
- Fault detection /
- observer design /
- pole assignment /
- ellipsoidal analysis
-

图 3 突变故障的残差${\boldsymbol{r}}_k$与残差椭球${\cal{E}}(0,R_k)$ ($k = 95\sim105$)
Fig. 3 Residual ${\boldsymbol{r}}_k$ and residual ellipsoid ${\cal{E}}(0,R_k)$ of abrupt fault ($k = 95\sim105$)
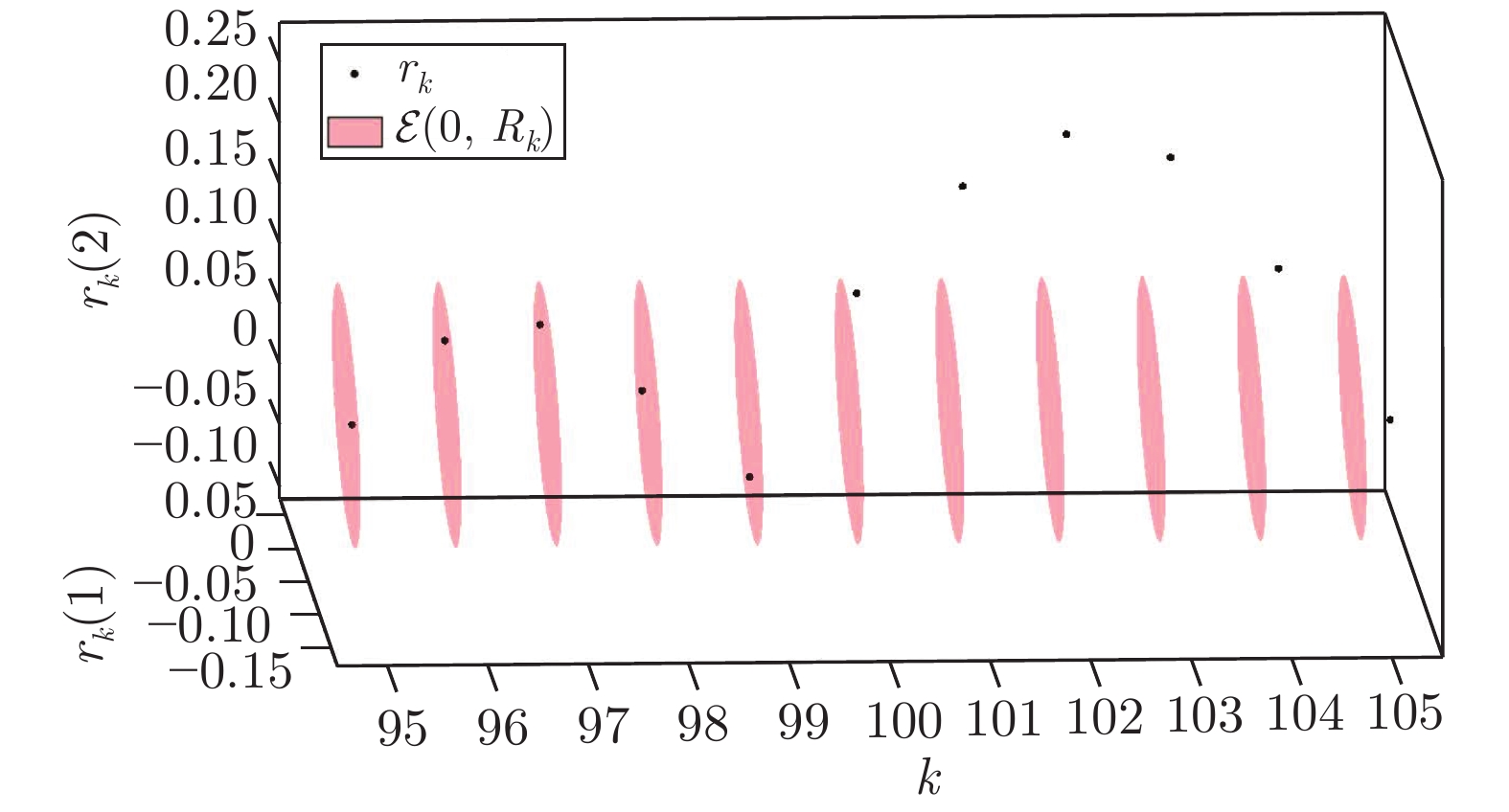
图 5 时变故障的残差${\boldsymbol{r}}_k$与残差椭球${\cal{E}}(0,R_k)$ ($k = 95\sim105$)
Fig. 5 Residual ${\boldsymbol{r}}_k$ and residual ellipsoid ${\cal{E}}(0,R_k)$ of time-varying fault ($k = 95\sim105$)
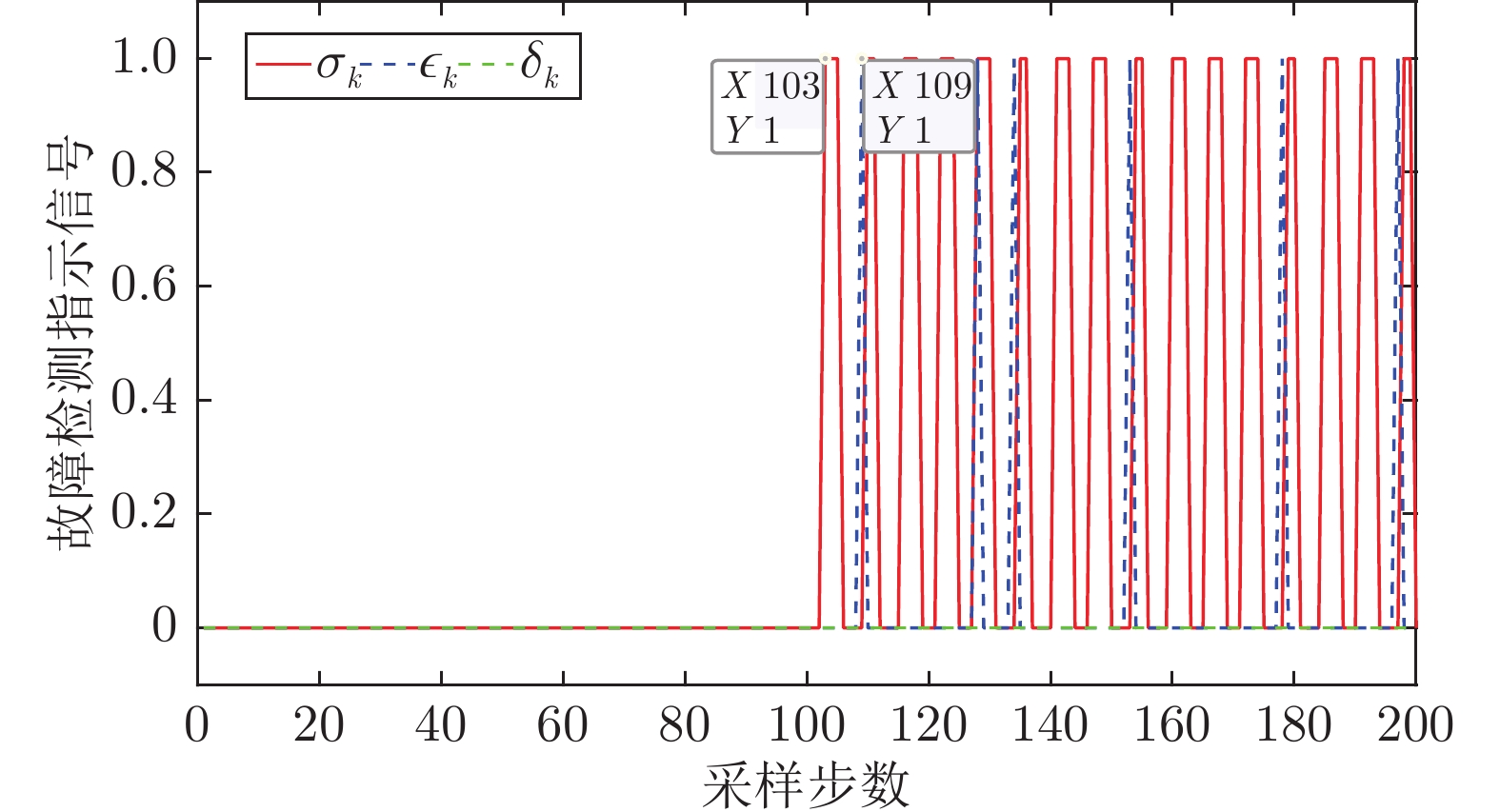
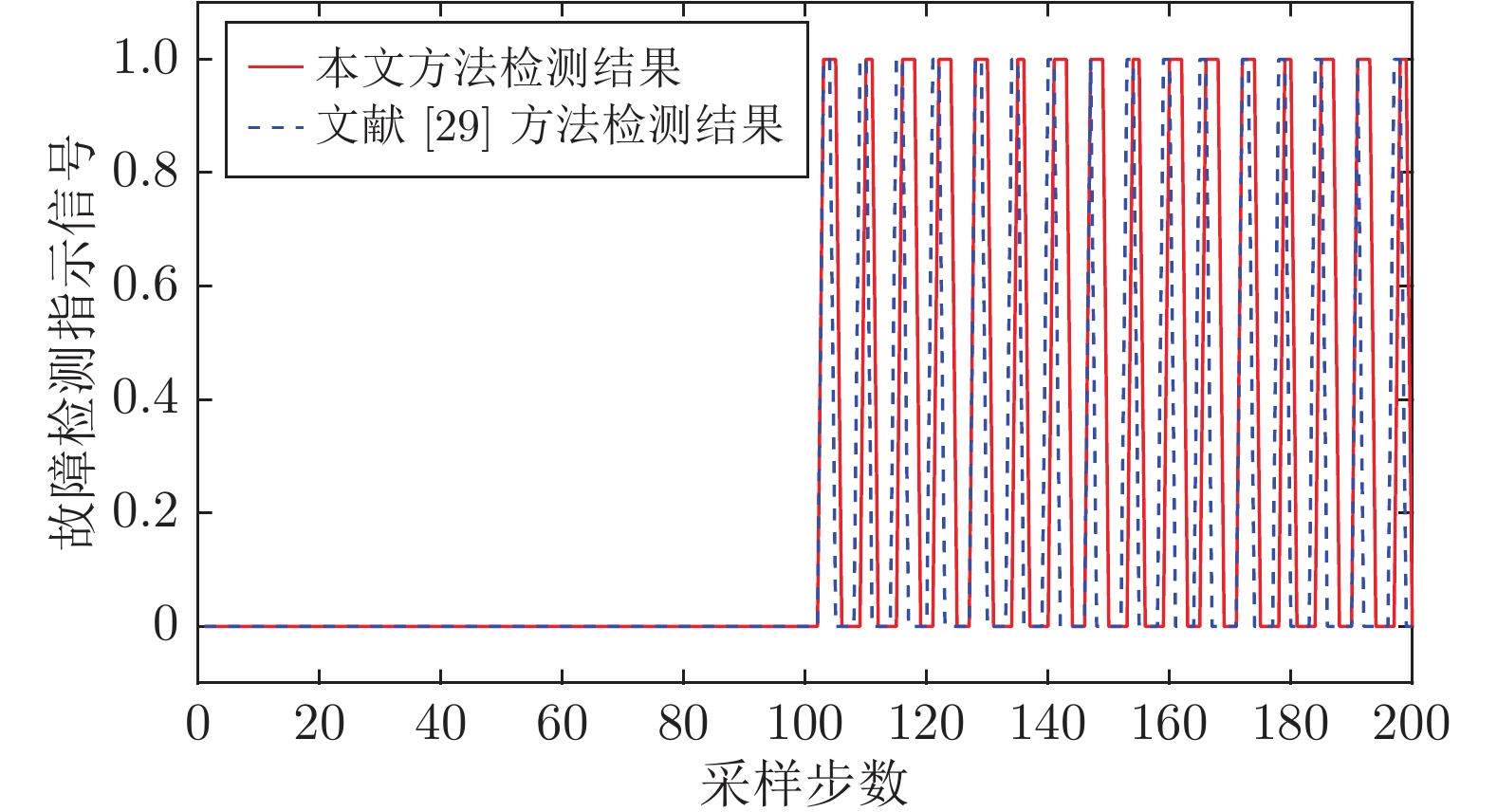
图 6 微小突变故障检测指示值对比结果
Fig. 6 Comparison result of small abrupt fault detection indication values
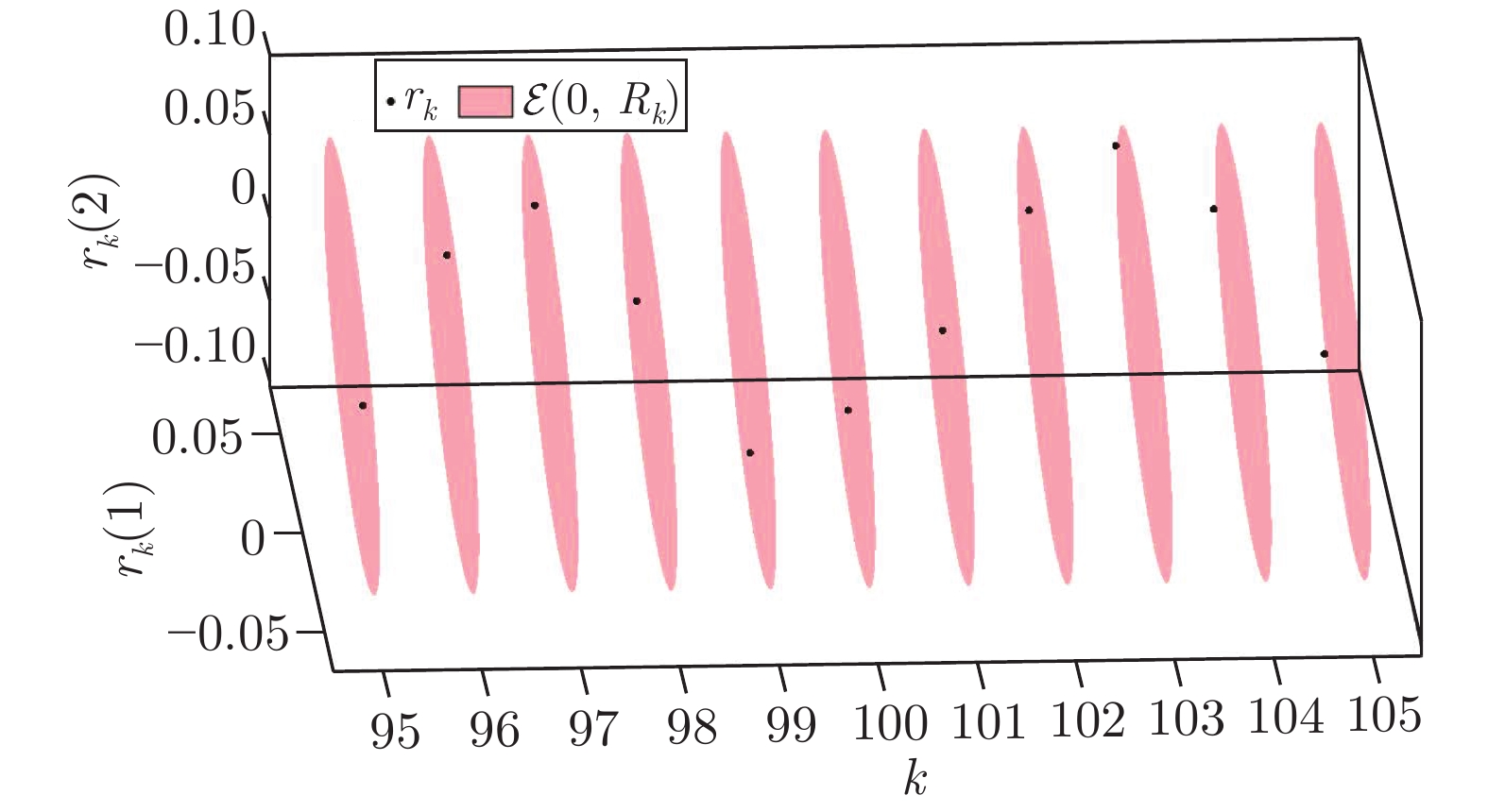
图 7 本文方法的残差${\boldsymbol{r}}_k$与残差椭球${\cal{E}}(0,R_k)$ ($k = 95\sim105$)
Fig. 7 Residual ${\boldsymbol{r}}_k$ and residual ellipsoid ${\cal{E}}(0,R_k)$ by the proposed approach ($k = 95\sim105$)
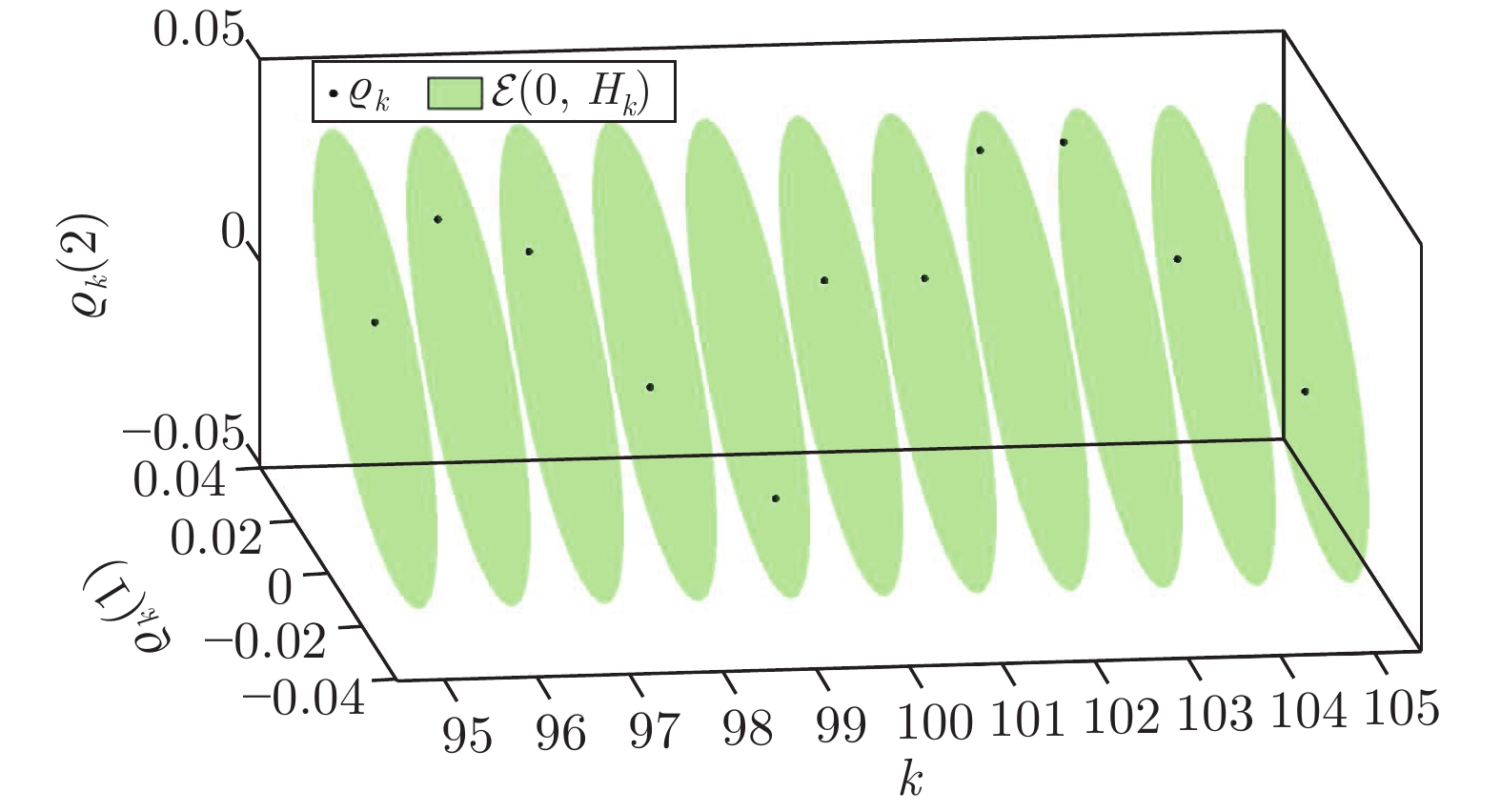
图 8 $H_-/H_{\infty}$方法的残差${\boldsymbol{\varrho}}_k$与残差椭球${\cal{E}}(0,H_k)$ ($k = 95\sim105$)
Fig. 8 Residual ${\boldsymbol{\varrho}}_k$ and residual ellipsoid ${\cal{E}}(0,H_k)$ by the $H_-/H_{\infty}$ method ($k = 95\sim105$)

图 9 $H_-/L_{\infty}$方法的残差${\boldsymbol{\varsigma}}_k$与残差椭球${\cal{E}}(0,L_k)$ ($k = 95\sim105$)
Fig. 9 Residual ${\boldsymbol{\varsigma}}_k$ and residual ellipsoid ${\cal{E}}(0,L_k)$ by the $H_-/L_{\infty}$ method ($k = 95\sim105$)

-
[1] 胡昌华, 许化龙. 控制系统故障诊断与容错控制的分析和设计. 北京: 国防工业出版社, 2008.Hu Chang-Hua, Xu Hua-Long. Design and Analysis of Fault-tolerant Control and Fault Diagnosis for Control Systems. Beijing: National Defense Industry Press, 2008. [2] 姜斌, 冒泽慧, 杨浩, 张友民. 控制系统的故障诊断与故障调节. 北京: 国防工业出版社, 2009.Jiang Bin, Mao Ze-Hui, Yang Hao, Zhang You-Min. Fault Diagnosis and Fault Accommodation for Control Systems. Beijing: National Defense Industry Press, 2009. [3] 周东华, 胡艳艳. 动态系统的故障诊断技术. 自动化学报, 2009, 35(6): 748-758 doi: 10.3724/SP.J.1004.2009.00748Zhou Dong-Hua, Hu Yan-Yan. Fault diagnosis techniques for dynamic systems. Acta Automatica Sinica, 2009, 35(6): 748-758 doi: 10.3724/SP.J.1004.2009.00748 [4] Yu X, Fu Y, Zhong M Y. Aircraft fault accommodation with consideration of actuator control authority and gyro availability. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1285-1299 doi: 10.1109/TCST.2017.2707378 [5] Wu Y K, Jiang B, Lu N Y. A descriptor system approach for estimation of incipient faults with application to high-speed railway traction devices. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(10): 2108-2118 doi: 10.1109/TSMC.2017.2757264 [6] Li X J, Yang G H. Fault detection for T-S fuzzy systems with unknown membership functions. IEEE Transactions on Fuzzy Systems, 2014, 22(1): 139-152 doi: 10.1109/TFUZZ.2013.2249519 [7] Zhang Y L, Qiu Q W, Yang F W, Han Q L, Vlacic L, Lu J W. Set-membership filtering approach for fault detection of systems with unknown-but-bounded noises. In: Proceedings of the 5th Australian Control Conference. Gold Coast, Australia: 2015. 170−175 [8] Yang G H, Wang H M. Fault detection and isolation for a class of uncertain state-feedback fuzzy control systems. IEEE Transactions on Fuzzy Systems, 2015, 23(1): 139-151 doi: 10.1109/TFUZZ.2014.2308920 [9] Du D S, Xu S Y, Cocquempot V. Fault detection for nonlinear discrete-time switched systems with persistent dwell-time. IEEE Transactions on Fuzzy Systems, 2018, 26(4): 2466-2474 doi: 10.1109/TFUZZ.2017.2753164 [10] Li Y Y, Karimi H R, Zhang Q, Zhao D, Li Y B. Fault detection for linear discrete time-varying systems subject to random sensor delay: a Riccati equation approach. IEEE Transactions on Circuits and Systems I: Regular Papers, 2018, 65(5): 1707-1716 doi: 10.1109/TCSI.2017.2763625 [11] Li J T, Wang Z H, Shen Y, Rodrigues M. Zonotopic fault detection observer for linear parameter-varying descriptor systems. International Journal of Robust and Nonlinear Control, 2019, 29(11): 3426-3445 doi: 10.1002/rnc.4567 [12] Zhou M, Cao Z C, Zhou M C, Wang J, Wang Z H. Zonotoptic fault estimation for discrete-time {LPV} systems with bounded parametric uncertainty. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(2): 690-700 doi: 10.1109/TITS.2019.2898853 [13] Hou M, Patton R J. An LMI approach to H_/H∞ fault detection observers. In: Proceedings of the UKACC International Conference on Control. Exeter, UK: 1996. 305−310 [14] Wang J L, Yang G H, Liu J. An LMI approach to H_ index and mixed H_/H∞ fault detection observer design. Automatica, 2007, 43(9): 1656-1665 doi: 10.1016/j.automatica.2007.02.019 [15] Yang H J, Xia Y Q, Liu B, Fault detection for T-S fuzzy discrete systems in finite-frequency domain. IEEE Transactions on Systems, Man, and Cybernetics, 2011, 41(4): 911-920 doi: 10.1109/TSMCB.2010.2099653 [16] Aouaouda S, Chadli M, Shi P, Karimi H R. Discrete-time H_/H∞ sensor fault detection observer design for nonlinear systems with parameter uncertainty. International Journal of Robust and Nonlinear Control, 2015, 25(3): 339-361 doi: 10.1002/rnc.3089 [17] Wang Z H, Shi P, Lim C C. H_/H∞ fault detection observer in finite frequency domain for linear parameter-varying descriptor systems. Automatica, 2017, 86: 38-45 doi: 10.1016/j.automatica.2017.08.021 [18] Han W X, Wang Z H, Shen Y. H_/L∞ fault detection observer for linear parameter-varying systems with parametric uncertainty. International Journal of Robust and Nonlinear Control, 2019, 29(10): 2912-2926 doi: 10.1002/rnc.4530 [19] Wang Z H, Lim C C, Shi P, Shen Y. H_/L∞ fault detection observer design for linear parameter-varying systems. In: Proceedings of the 20th World Congress of the International Federation of Automatic Control. Toulouse, France: 2017. 15271−15276 [20] 周萌, 王振华, 王昶, 沈毅. Lipschitz非线性系统的H_/L∞故障检测观测器设计. 控制理论与应用, 2018, 35(6): 778-785 doi: 10.7641/CTA.2018.70356Zhou Meng, Wang Zhen-Hua, Wang Chang, Shen Yi. H_/L∞ fault detection observer design for Lipschitz nonlinear systems. Control Theory & Applications, 2018, 35(6): 778-785 doi: 10.7641/CTA.2018.70356 [21] Zhang Z H, Yang G H. Fault detection for discrete-time LPV systems using interval observers. International Journal of Systems Science, 2017, 48(14): 2921-2935 doi: 10.1080/00207721.2017.1363926 [22] Frank P M, Ding S X. Survey of robust residual generation and evaluation methods in observer-based fault detection systems. Journal of Process Control, 1997, 7(6): 403-424 doi: 10.1016/S0959-1524(97)00016-4 [23] Wang H, Yang G H. A finite frequency domain approach to fault detection for linear discrete-time systems. International Journal of Control, 2008, 81(7): 1162-1171 doi: 10.1080/00207170701691513 [24] Chadli M, Abdo A, Ding S X. H_/H∞ fault detection filter for discrete-time Takagi-Sugeno fuzzy system. Automatica, 2013, 49: 1996-2005 doi: 10.1016/j.automatica.2013.03.014 [25] Tang W T, Wang Z H, Shen Y. Fault detection and isolation for discrete-time descriptor systems based on H_/L∞ observer and zonotopic residual evaluation. International Journal of Control, DOI: 10.1080/00207179.2018 [26] Combastel C, Zhang Q H. Robust fault diagnosis based on adaptive estimation and set-membership computations. In: Proceedings of the 6th World Congress of the International Federation of Automatic Control Symposium on Fault Detection, Supervision and Safety for Technical Processes Safeprocess. Beijing, China: 2006. 1204−1209 [27] Scott J K, Findeisen R, Braatz R D, Raimondo D M. Input design for guaranteed fault diagnosis using zonotopes. Automatica, 2014, 50: 1580-1589 doi: 10.1016/j.automatica.2014.03.016 [28] Tang W T, Wang Z H, Rodrigues M, Theilliol D. Fault detection based on multi-objective observer and interval hull computation. In: Proceedings of the 10th World Congress of the International Federation of Automatic Control Symposium on Fault Detection, Supervision and Safety for Technical Processes Safeprocess. Warsaw, Poland: 2018. 332−337 [29] 李佶桃, 王振华, 沈毅. 线性离散系统的有限频域集员故障检测观测器设计. 自动化学报, 2020, 46(7): 1531-1538. DOI: 10.16383/j.aas.c170725Li Ji-Tao, Wang Zhen-Hua, Shen Yi. Set-membership fault detection observer design in finite-frequency domain for linear discrete-time system. Acta Automatica Sinica, 2020, 46(7): 1531-1538. DOI: 10.16383/j.aas.c170725 [30] Wang X D, Fei Z Y, Wang Z H, Yu J Y. Zonotopic fault detection observer design for discrete-time systems with adaptively adjusted event-triggered mechanism. IET Control Theory and Applications, 2020, 14(1): 96-104 [31] Tang W T, Wang Z H, Wang Y, Raïssi T, Shen Y. Interval estimation methods for discrete-time linear time-invariant systems. IEEE Transactions on Automatic Control, 2019, 64(11): 4717-4724 doi: 10.1109/TAC.2019.2902673 [32] Polyak B T, Nazin S A, Durieu C, Walter E. Ellipsoidal parameter or state estimation under model uncertainty. Automatica, 2004, 40(7): 1171-1179 doi: 10.1016/j.automatica.2004.02.014 [33] Chernousko F L. Ellipsoidal state estimation for dynamical systems. Nonlinear Analysis: Theory, Methods and Applications, 2005, 60(5-7): 872-879 [34] Kishida M, Braatz R D. Ellipsoid bounds on state trajectories for discrete-time systems with time-invariant and time-varying linear fractional uncertainties. In: Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, FL, USA: 2011. 5671−5676 [35] 周波, 钱堃, 马旭东, 戴先中. 一种新的基于保证定界椭球算法的非线性集员滤波器. 自动化学报, 2013, 39(2): 150-158Zhou Bo, Qian Kun, Ma Xu-Dong, Dai Xian-Zhong. A new nonlinear set membership filter based on guaranteed bounding ellipsoid algorithm. Acta Automatica Sinica, 2013, 39(2): 150-158 [36] Chabane S B, Maniu C S, Alamo T, Camacho E F, Dumur D. A new approach for guaranteed ellipsoidal state estimation. In: Proceedings of the 19th World Congress of the International Federation of Automatic Control. Cape Town, South Africa: 2014. 6533−6538 [37] Liu Y S, Zhao Y, Wu F L. Ellipsoidal state-bounding-based set-membership estimation for linear system with unknown-but-bounded disturbances. IET Control Theory and Applications, 2016, 10(4): 431-442 [38] Reppa V, Tzes A. Fault detection and diagnosis based on parameter set estimation. IET Control Theory and Applications, 2011, 5(1): 69-83 [39] Wang J, Ge W S, Wu H Y, Zhou J L. Active fault detection based on residual ellipsoid. In: Proceedings of the 35th Chinese Control Conference. Chengdu, China: 2016. 6784−6789 [40] Huang J, Wang Y, Fukuda T. Set-membership-based fault detection and isolation for robotic assembly of electrical connectors. IEEE Transactions on Automation Science and Engineering, 2018, 15(1): 160-171 doi: 10.1109/TASE.2016.2602319 [41] Mousavinejad E, Yang F W, Han Q L, Vlacic L. A novel cyber attack detection method in networked control systems. IEEE Transactions on Cybernetics, 2018, 48(11): 3254-3264 doi: 10.1109/TCYB.2018.2843358 [42] Zhang W H, Wang Z H, Raïssi T, Shen Y, Zhang F D, Xu M. Ellipsoid-based interval estimation for Takagi-Sugeno fuzzy systems. In: Proceedings of the 58th IEEE Conference on Decision and Control. Nice, France: 2019. 3202−3207 [43] Schweppe F. Recursive state estimation: Unknown but bounded errors and system inputs. IEEE Transactions on Automatic Control, 1968, 13(1): 22-28 doi: 10.1109/TAC.1968.1098790 [44] Durieu C, Polyak B T, Walter E. Trace versus determinant in ellipsoidal outer-bounding, with application to state estimation. In: Proceedings of the 13th World Congress of the International Federation of Automatic Control. San Francisco, USA: 1996. 3975−3980 [45] Wang Z H, Shen Y, Zhang X L, Wang Q. Observer design for discrete-time descriptor systems: an LMI approach. Systems & Control Letters, 2012, 61(6): 683-687 [46] Boyd S, Ghaoui L E, Feron E, Balakrishnan V. Linear Matrix Inequalities in System and Control Theory. Philadelphia, Pennsylvania: Society for Industrial and Applied Mathematics, 1995. -

 下载:
下载:


计量
- 文章访问数: 1602
- HTML全文浏览量: 328
- PDF下载量: 200
- 被引次数: 0
