

Autonomous Vehicle Motion Planning Based on Improved RRT* Algorithm and Trajectory Optimization
-
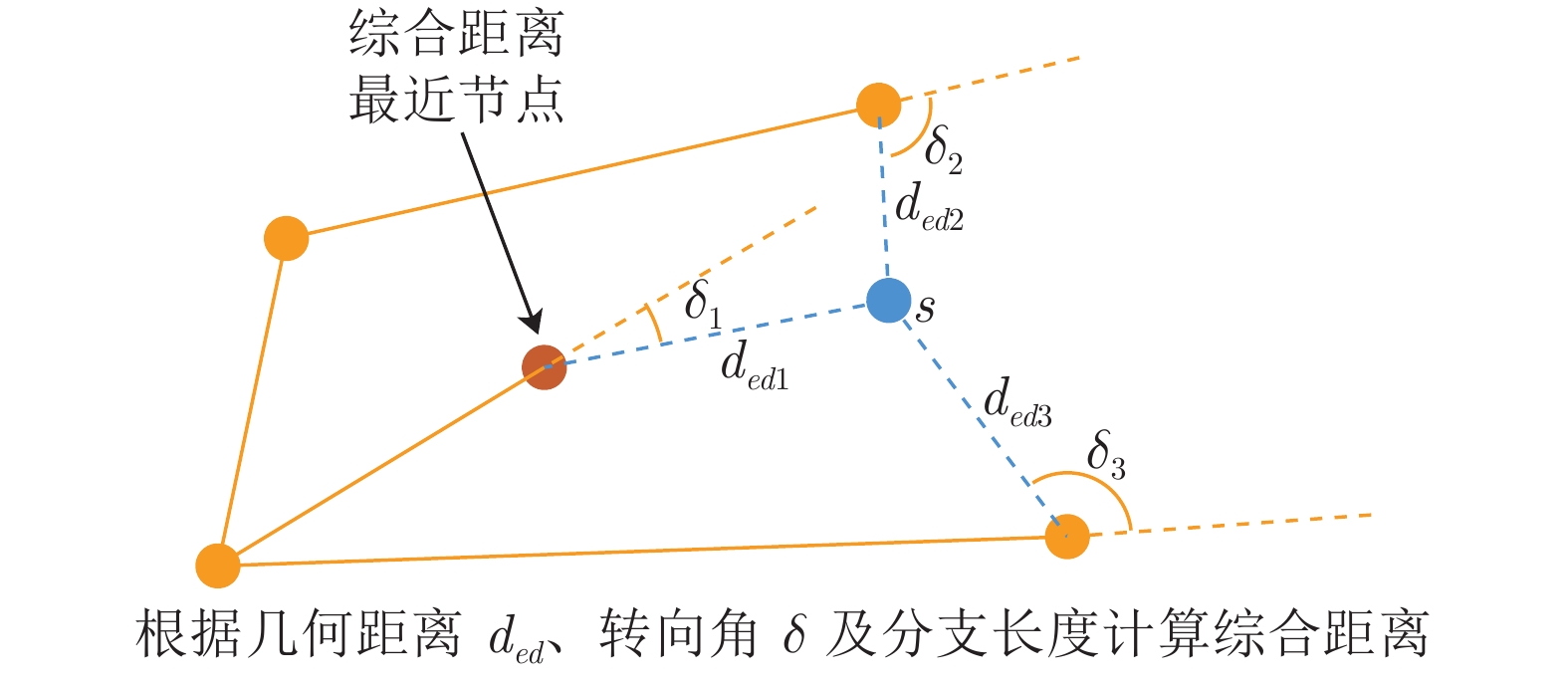
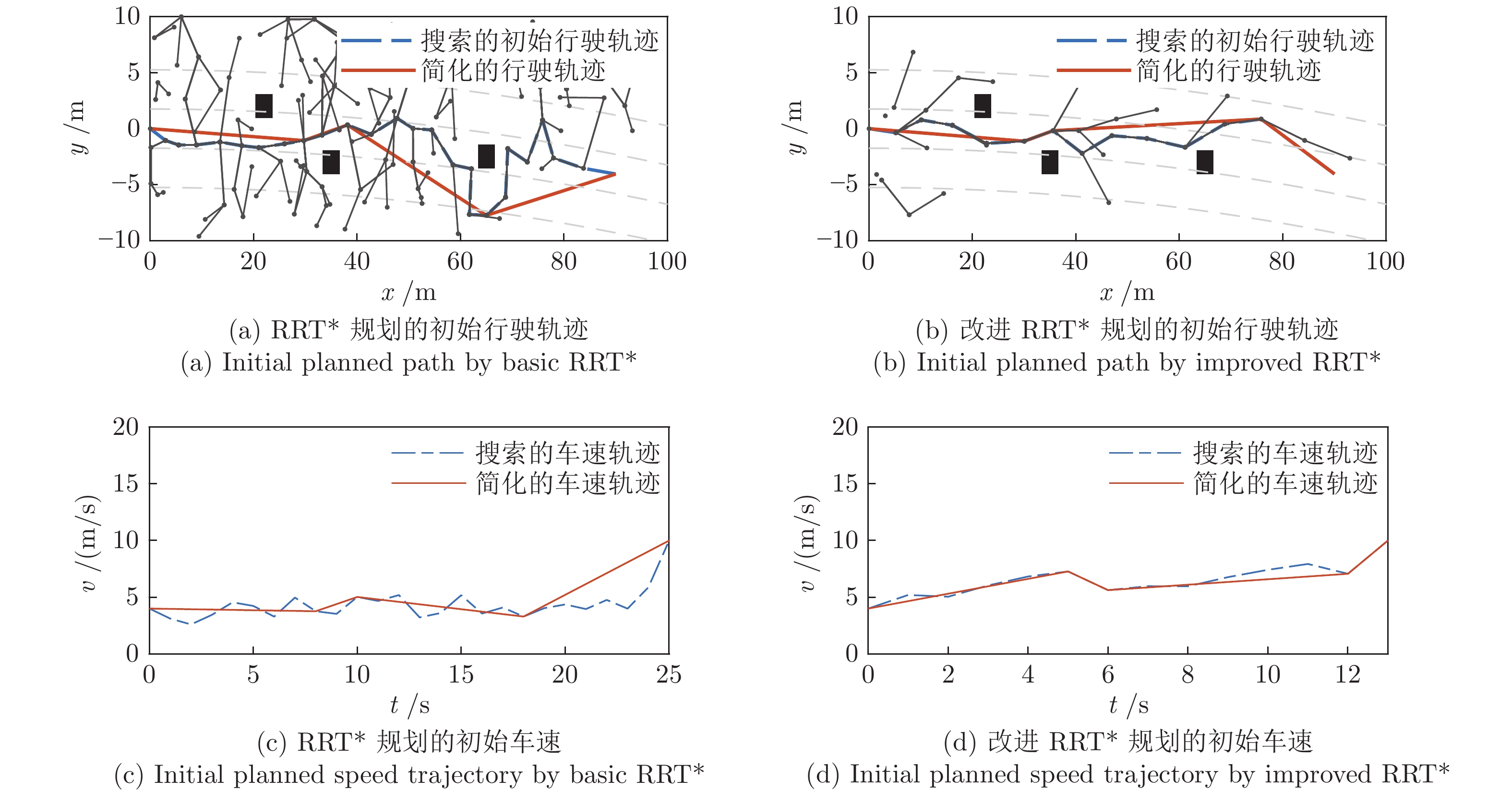
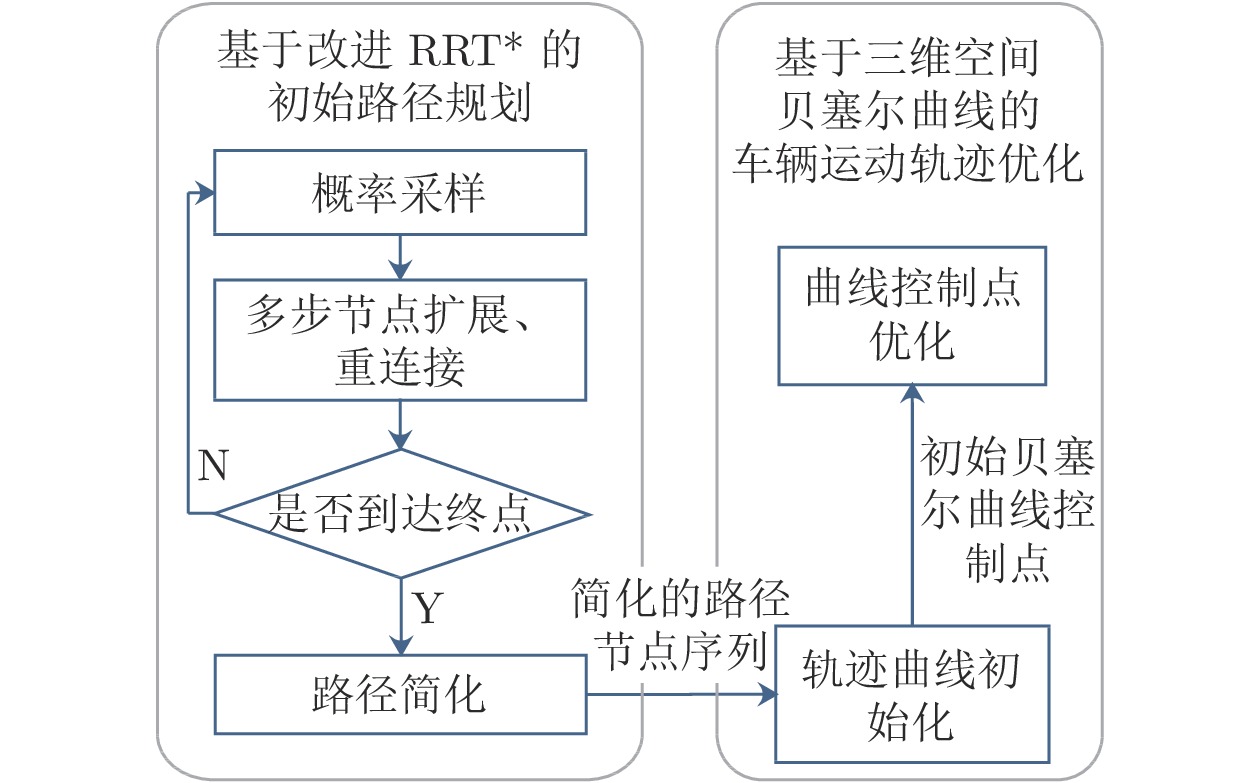
摘要: 针对传统快速扩展随机树算法 (Rapidly-exploring random tree, RRT)搜索较慢、规划路径曲折、平顺性差等问题, 提出了一种结合改进RRT* 与贝塞尔曲线控制点优化的智能车辆运动规划方法. 该方法通过在给定概率分布下采样, 结合基于方向相似性的多步扩展与路径简化, 使用贝塞尔曲线拟合生成规划问题初始解, 最后使用序列二次规划优化曲线控制点, 从而在动态障碍物环境中生成兼具安全性与驾驶舒适性的车辆行驶轨迹. 在仿真实验中将本文算法与常规RRT及曲线拟合方法进行了比较, 结果显示本文算法在搜索速度、平顺性、安全性等方面有较大提升.Abstract: An autonomous vehicle motion planning algorithm based on improved rapidly-exploring random tree (RRT) and Bezier control point optimization is proposed to accelerate the search, avoid tortuous paths and improve path smoothness. The proposed algorithm combines RRT* with the probability sampling, multi-step expansion and path simplification to generate an initial trajectory. This trajectory is used to calculate a set of initial control points of Bezier curve. Then the control points are optimized by sequential quadratic programming to improve path smoothness and safety in the environment with dynamic obstacles. The proposed algorithm is compared with the conventional method in the simulation. The results show that the algorithm can reduce the search time, improve the path smoothness and the trajectory satisfies the vehicle dynamics constraint.
-
[1] 胡云峰, 曲婷, 刘俊, 施竹清, 朱冰, 曹东璞. 智能汽车人机协同控制的研究现状与展望. 自动化学报, 2019, 45 (7): 1261-1280Hu Yun-Feng, Qu Ting, Liu Jun, Shi Zhu-Qing, Zhu Bing, Cao Dong-Pu. Human-machine cooperative control of intelligent vehicle: recent developments and future perspectives. Acta Automatica Sinica, 2019, 45 (7): 1261-1280 (in Chinese) [2] Yong S Z, Yershov D, Frazzoli E, Paden B, Michal C. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55 doi: 10.1109/TIV.2016.2578706 [3] 李柏, 张友民, 邵之江. 自动驾驶车辆运动规划方法综述. 控制与信息技术, 2018, 456(6): 7-12Li Bai, Zhang You-Min, Shao Zhi-Jiang. Motion planning methodologies for automated vehicles: a critical review. Control and Information Technology, 2018, 456(6): 7-12 (in Chinese) [4] Kawabata K, Ma L, Xue J, Zhu C, Zheng N. A path generation for automated vehicle based on Bezier curve and via-points. Robotics and Autonomous Systems, 2015, 74(A): 243-252 [5] Li X, Sun Z, Cao D, Liu D, He H. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mechanical Systems and Signal Processing, 2017, 87(B): 118-137 [6] Oliveira R, Cirillo M, Jonas M, Wahlberg B. Combining lattice-based planning and path optimization in autonomous heavy duty vehicle applications. In: Proceedings of the 2018 IEEE Intelligent Vehicles Symposium. Changshu, China: IEEE, 2018. 2090−2097 [7] Bounini F, Gingras D, Pollart H, Gruyer D. Modified artificial potential field method for online path planning applications. In: Proceedings of the 2017 IEEE Intelligent Vehicles Symposium. Los Angeles, CA, USA: IEEE, 2017. 180−185 [8] Ma L, Xue J, Kawabata K. Efficient sampling-based motion planning for on-road autonomous driving. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4) : 1961-1976 doi: 10.1109/TITS.2015.2389215 [9] 韩月起, 张凯, 宾洋, 秦闯, 徐云霄, 李小川, 等. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法. 自动化学报, 2020, 46(1): 153-167Han Yue-Qi, Zhang Kai, Bin Yang, Qin Chuang, Xu Yun-Xiao, Li Xiao-Chuan, et al. Convex approximation based avoidance theory and path planning MPC for driver-less vehicles. Acta Automatica Sinica, , 2020, 46(1): 153-167 (in Chinese) [10] 吴伟, 刘洋, 刘威, 吴国弘, 马万经. 自动驾驶环境下交叉口车辆路径规划与最优控制模型. 自动化学报, 2020, 46(9): 1971-1985Wu Wei, Liu Yang, Liu Wei, Wu Guo-Hong, Ma Wan-Jing. A novel autonomous vehicle trajectory planning and control model for connected-and-autonomous intersections. Acta Automatica Sinica, 2020, 46(9): 1971-1985 (in Chinese) [11] Qureshi A H, Miao Y L, Simeonov A, Yip M C. Motion planning networks: Bridging the gap between learning-based and classical motion planners. IEEE Transactions on Robotics, 2020, 37(1): 48-66 [12] Ye F, Zhang S, Wang P, Chan C Y. A survey of deep reinforcement learning algorithms for motion planning and control of autonomous vehicles. In: Proceedings of the 2021 IEEE Intelligent Vehicles Symposium (IV). Nagoya, Japan: IEEE, 2021. 1073−1080 [13] Kavraki L E, Svestka P, Latombe J C, Overmars M H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Transactions on Robotics and Automation, 2002, 12(4): 566-580 [14] Janson L, Schmerling E, Clark A, Pavone M. Fast marching tree?: a fast marching sampling-based method for optimal motion planning in many dimensions. The International Journal of Robotics Research, 2015, 34(7): 883-921 doi: 10.1177/0278364915577958 [15] LaValle S M. Rapidly-exploring Random Trees: A New Tool for Path Planning. Technical Report, TR98-11, Ames, USA: Department of Computer Science, Iowa State University, 1998. [16] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 2011, 30(7): 846−894 [17] 宋晓琳, 周南, 黄正瑜, 曹昊天. 改进RRT在汽车避障局部路径规划中的应用. 湖南大学学报(自然科学版), 2017, 44: 30-37Song Xiao-Lin, Zhou Nan, Huang Zheng-Yu, Cao Hao-Tian. An improved RRT algorithm of local path planning for vehicle collision avoidance. Journal of Hunan University (Natural Sciences), 2017, 44: 30-37 (in Chinese) [18] 贺伊琳, 高奇, 赵丹, 刘伟. 基于改进RRT算法的无人驾驶汽车轨迹规划. 西北大学学报(自然科学版), 2018, 48: 651-658He Yi-Lin, Gao Qi, Zhao Dan, Liu Wei. The trajectory planning of autonomous vehicle based on improved RRT algorithm. Journal of Northwest University (Natural Science Edition), 2018, 48: 651-658 (in Chinese) [19] Yoon S, Lee D, Jung J, Hyunchul D. Fast marching tree: a fast marching sampling-based method for optimal motion planning in many dimensions. Journal of Intelligent & Robotic Systems, 2015, 34(7): 883-921 [20] Yoshiaki K, Justin T, Sertac K, Gaston F, Emilio F, Jonathan P H. Motion planning in complex environments using closed-loop prediction. In: Proceedings of the 2008 AIAA Guidance, Navigation and Control Conference and Exhibit. Honolulu, Hawaii, USA: AIAA, 2008. [21] Gong H, Yin C, Zhang F, Hou Z, Member S, Zhang R. A path planning algorithm for unmanned vehicles based on target-oriented rapidly-exploring random tree. In: Proceedings of the 11th Asian Control Conference. Gold Coast Convention Centre, Australia: IEEE, 2017. [22] 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述. 兵工学报, 2017, 38(6): 1203-1214 doi: 10.3969/j.issn.1000-1093.2017.06.021Chen Hui-Yan, Chen Shu-Ping, Gong Jian-Wei. A review on the research of lateral control for intelligent vehicles. Acta Armamentarii, 2017, 38(6): 1203-1214 (in Chinese) doi: 10.3969/j.issn.1000-1093.2017.06.021 [23] 李耀宇, 朱一凡, 李群. 基于Legendre伪谱法的UGV避障路径规划. 指挥控制与仿真, 2012, 34(4): 124-127Li Yao-Yu, Zhu Yi-Fan, Li Qun. Legendre pseudospectral path planning method for UGV obstacle avoidance. Command Control & Simulation, 2012, 34(4): 124-127 (in Chinese) [24] 王炳琪, 杨明, 王春香, 王冰. 一种基于最优状态点的无人车路径跟踪横向控制方法. 自动化学报, 2019, 45(10): 1883-1892Wang Bing-Qi, Yang Ming, Wang Chun-Xiang, Wang Bing. Path tracking lateral control of self-driving vehicles based on the optimal state point. Acta Automatica Sinica, 2019, 45(10): 1883-1892 (in Chinese) -

 下载:
下载:





图(7)
计量
- 文章访问数: 3012
- HTML全文浏览量: 1687
- PDF下载量: 599
- 被引次数: 0
