

-
摘要:
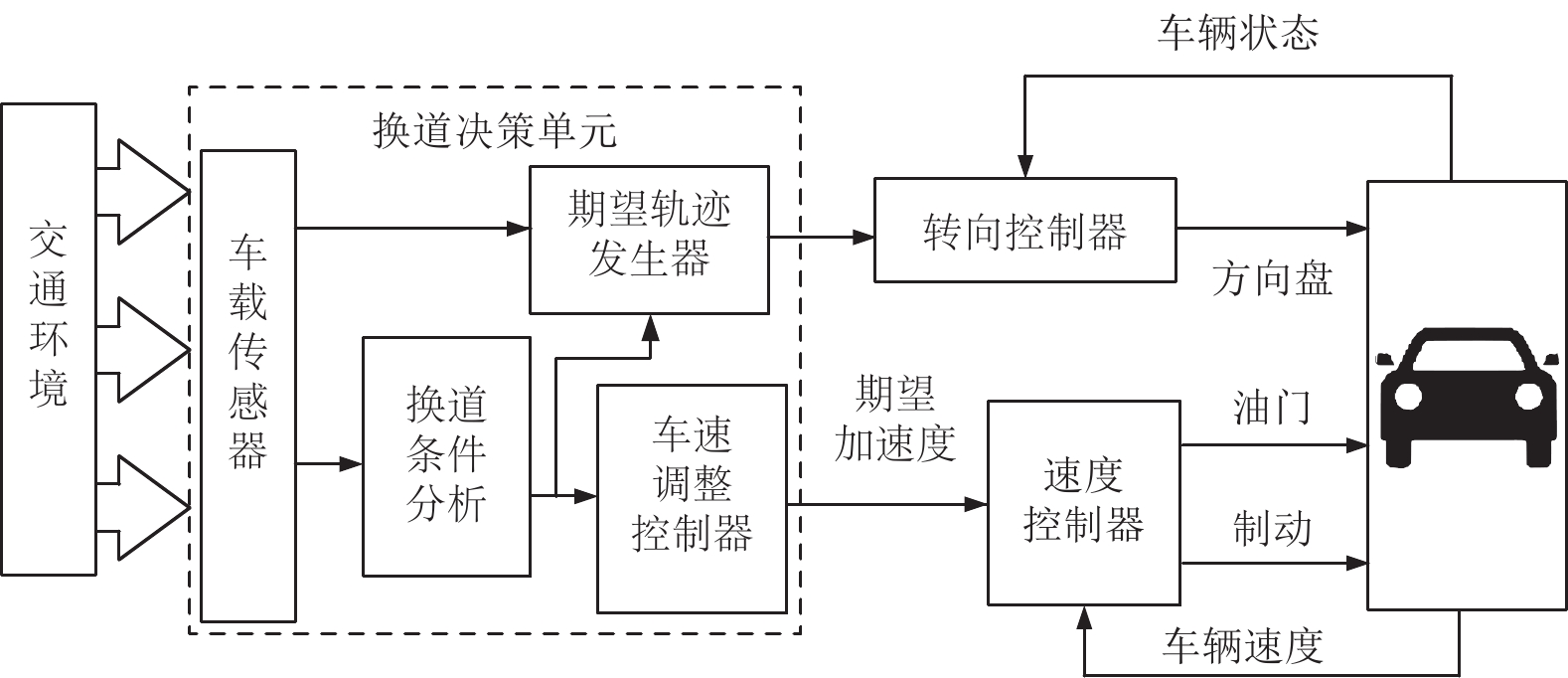
结合智能车面临的横向安全问题, 设计了一种具有横向安全性的智能驾驶员模型. 该系统由转向控制、速度控制和决策规划三个模块组成. 该系统的主要作用包括: 一是通过在转向控制中加入主要约束提高车辆在转向过程中的横向稳定性, 减小车辆发生侧滑、侧倾、侧偏等风险; 二是在换道场景下, 决策规划单元合理分析交通环境中的车间距并计算出驶入临近车道的速度和轨迹, 使智能车实现安全换道. CarSim/Simulink仿真结果表明, 该智能驾驶员系统提高了车辆行驶的横向安全性.
Abstract:In this paper, an intelligent driver model with lateral safety will be designed to solve the lateral safety problems faced by intelligent vehicles. The system consists of three modules: steering control module, speed control module and decision-making module. The lateral safety problems include: firstly, the lateral stability of the vehicle in the steering process is improved by adding major constraints to the steering controller to reduce the risk of vehicle sideslip, roll and sideslip; secondly, in the lane-changing scenario, the decision-making module analyses the environment and calculates the speed and the trajectory of the lane-changing. The simulation results show that the intelligent driver model improves the lateral safety of the vehicle.
-
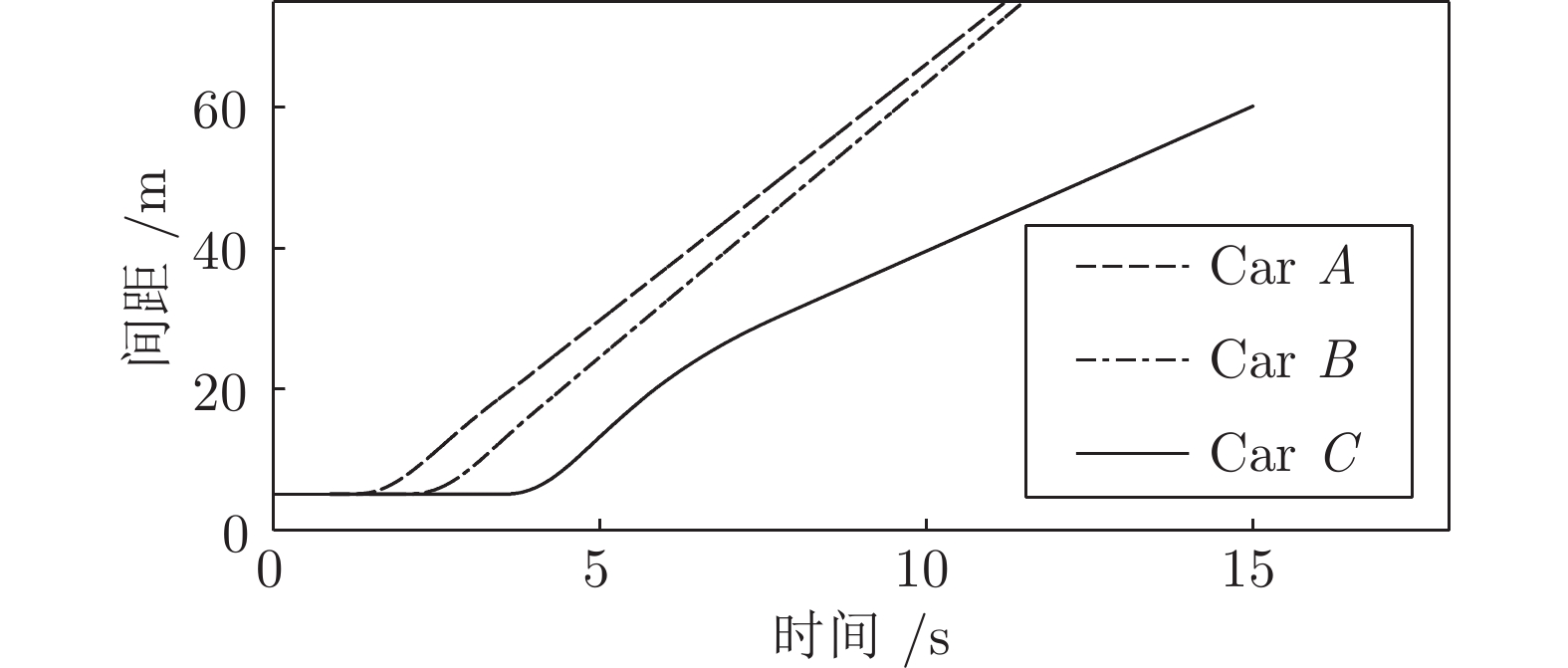
图 15 工况1智能车与目标车道后车间距
Fig. 15 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 1

图 13 工况1智能车与原车道前车间距
Fig. 13 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 1

图 14 工况1智能车与目标车道前车间距
Fig. 14 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 1
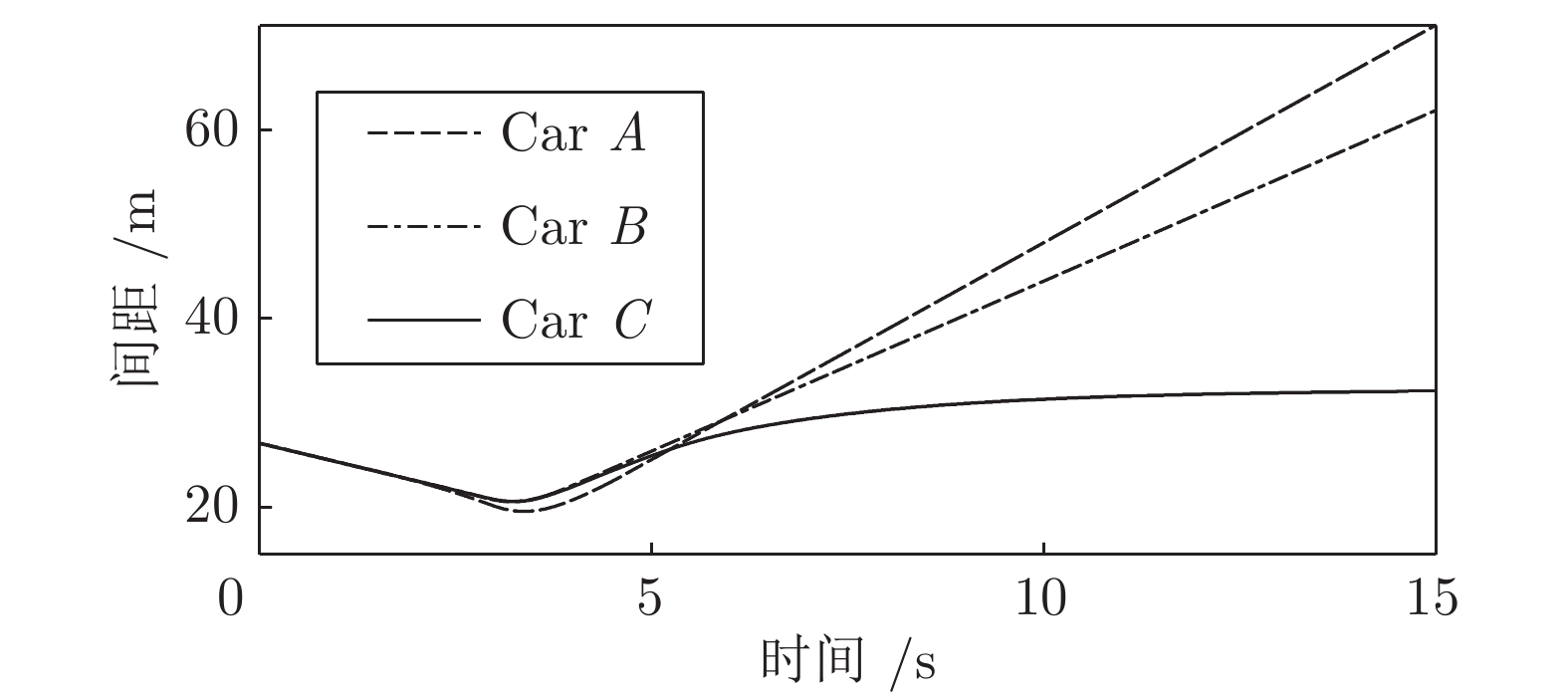
图 20 工况2智能车与目标车道后车间距
Fig. 20 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 2

图 18 工况2智能车与原车道前车间距
Fig. 18 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 2
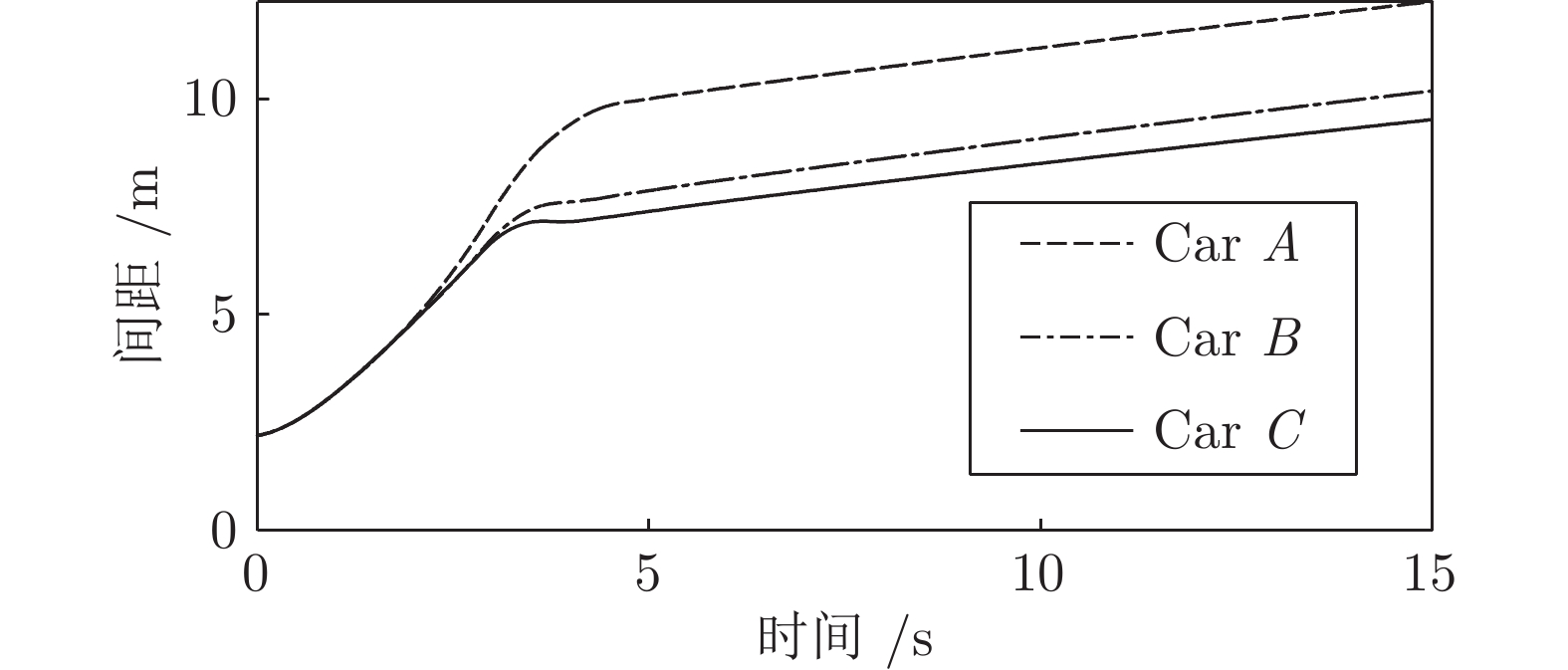
图 19 工况2智能车与目标车道前车间距
Fig. 19 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 2
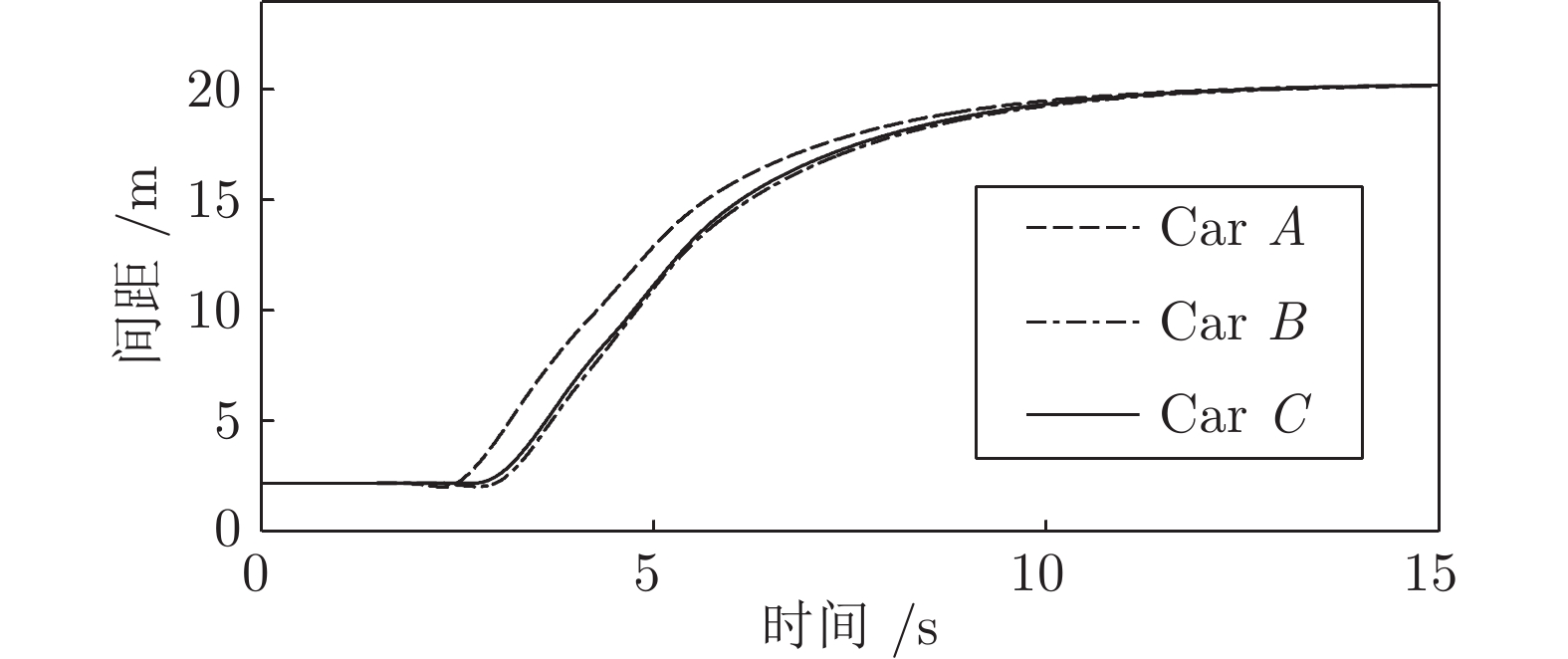
图 25 工况3智能车与目标车道后车间距
Fig. 25 The distance between the intelligent vehicle with the follow vehicle of the target lane on work Condition 3
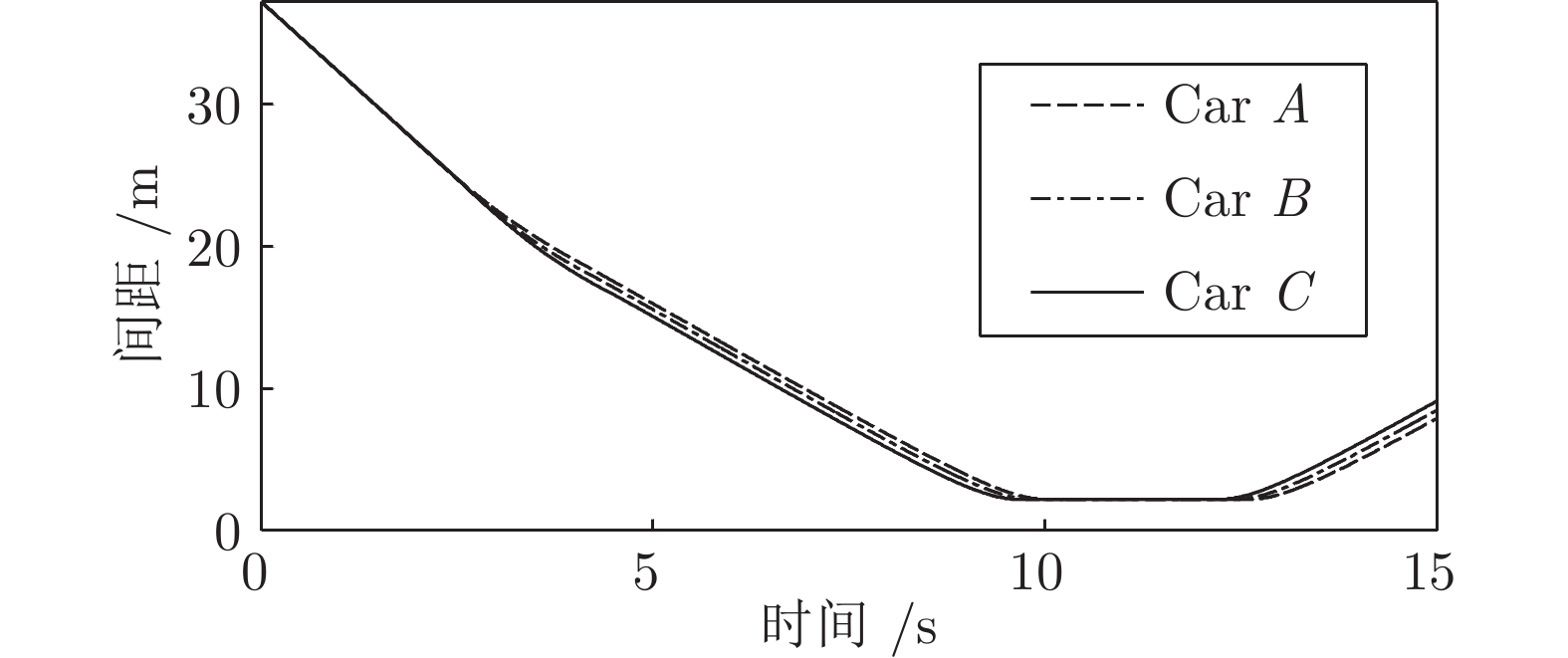
图 23 工况3智能车与原车道前车间距
Fig. 23 The distance between the intelligent vehicle with the lead vehicle of the original lane on work Condition 3
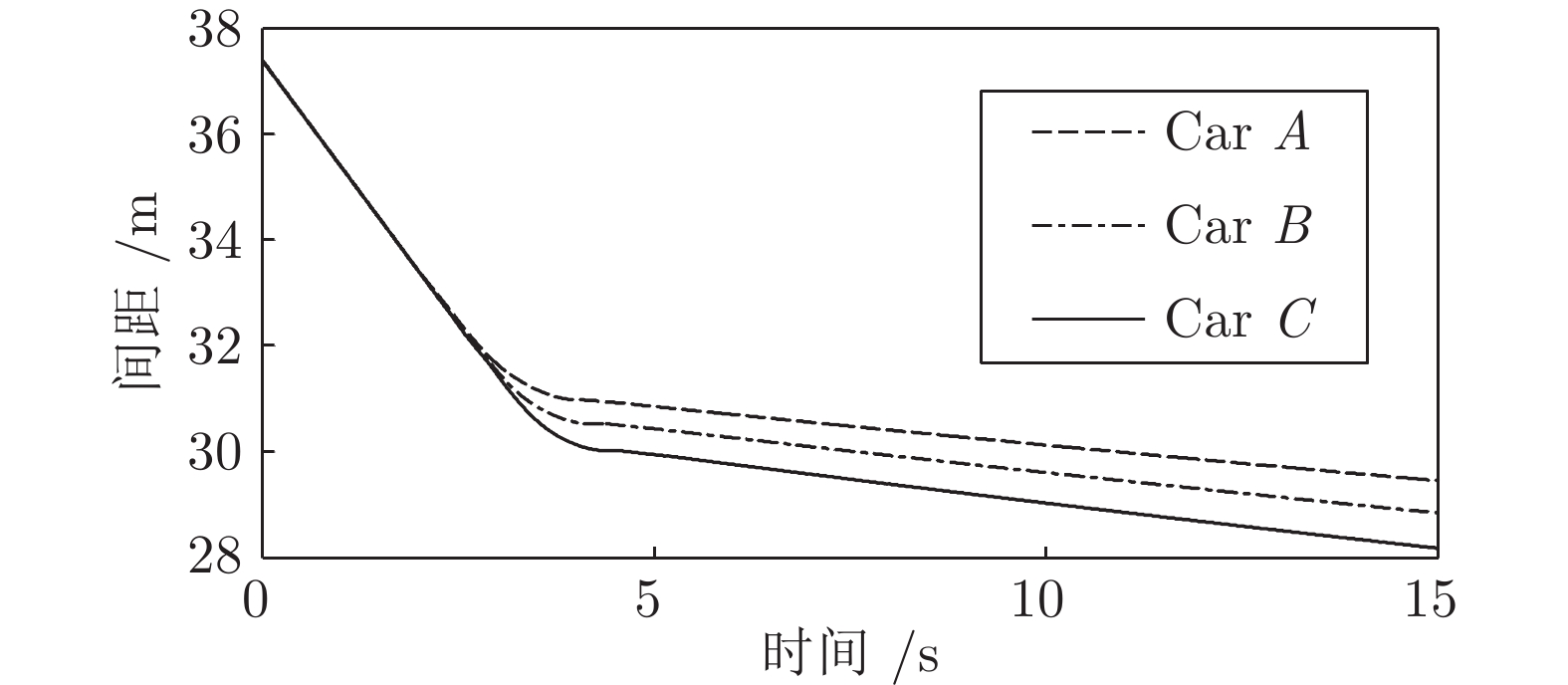
图 24 工况3智能车与目标车道前车间距
Fig. 24 The distance between the intelligent vehicle with the lead vehicle of the target lane on work Condition 3
表 1 智能驾驶员系统参数设置
Table 1 The definition of the intelligent driver system
实验车M Car A Car B Car C 最小安全间距${d_o}({\rm{m}})$ $ {d_o}(3) $ $ {d_o}(2) $ ${d_o}(1)$ 加速度幅度$({\rm{m/{s}}^2})$ 1.8 2.2 2.5 加速度增量$({\rm{m/{s}}^2})$ 0.09 0.11 0.12 反应时间$({\rm{s}})$ 0.4 0.7 0.9  下载: 导出CSV
下载: 导出CSV
-
[1] 李力, 王飞跃, 郑南宁, 张毅. 驾驶行为智能分析的研究与发展. 自动化学报, 2007, 33(10): 1014-1022Li Li, Wang Fei-Yue, Zheng Nan-Ning, Zhang Yi. Research and developments of intelligent driving behavior analysis. Acta Automatica Sinica, 2007, 33(10): 1014-1022 [2] Yoshida Y, Wang Q, Oya M, Okumura K. Adaptive longitudinal velocity and lane keeping control of four-wheel-steering vehicles. In: Proceedings of the 2007 SICE Annual Conference. Takamatsu, Japan: IEEE, 2007. 1305−1310 [3] Qu T, Chen H, Ji Y, Guo H Y, Cao D P. Modeling driver steering control based on stochastic model predictive control. In: Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester, UK: IEEE, 2013. 3704−3709 [4] Qu T, Chen H, Cao D P, Guo H Y, Gao B Z. Switching-based stochastic model predictive control approach for modeling driver steering skill. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 365-375 doi: 10.1109/TITS.2014.2334623 [5] Falcone P, Tufo M, Borrelli F, Asgari J, Tseng H E. A linear time varying model predictive control approach to the integrated vehicle dynamics control problem in autonomous systems. In: Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, USA: IEEE, 2007. 2980−2985 [6] Du X X, Tan K K. Autonomous vehicle velocity and steering control through nonlinear model predictive control scheme. In: Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific). Busan, Korea (South): IEEE, 2016: 1−6 [7] Amsalu S B, Homaifar A, Afghah F, Ramyar S, Kurt A. Driver behavior modeling near intersections using support vector machines based on statistical feature extraction. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV). Seoul, Korea (South): IEEE, 2015. 1270−1275 [8] 陈虹, 宫洵, 胡云峰, 刘奇芳, 高炳钊, 郭洪艳. 汽车控制的研究现状与展望. 自动化学报, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6Chen Hong, Gong Xun, Hu Yun-Feng, Liu Qi-Fang, Gao Bing-Zhao, Guo Hong-Yan. Automotive control: The state of the art and perspective. Acta Automatica Sinica, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6 [9] Kehtarnavaz N, Groswold N, Miller K, Lascoe P. A transportable neural-network approach to autonomous vehicle following. IEEE Transactions on Vehicular Technology, 1998, 47(2): 694-702 doi: 10.1109/25.669106 [10] 陈虹. 模型预测控制. 北京: 科学出版社, 2013.Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. [11] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制. 北京: 北京理工大学出版社, 2014.Gong Jian-Wei, Jiang Yan, Xu Wei. Model Predictive Control for Self-Driving Vehicles. Beijing: Beijing Institute of Technology Press, 2014. [12] 赵曰贺. 驾驶员—汽车闭环系统侧翻稳定性分析及防侧翻控制 [硕士学位论文], 南京航空航天大学, 中国, 2016.Zhao Yue-He. Research on Rollover Stability and Anti-Roll Control for Driver-Vehicle Closed-Loop System [Master thesis], Nanjing University of Aeronautics and Astronautics, China, 2016. [13] 徐杨, 陆丽萍, 褚端峰, 黄子超. 无人车辆轨迹规划与跟踪控制的统一建模方法. 自动化学报, 2019, 45(4): 799-807Xu Yang, Lu Li-Ping, Chu Duan-Feng, Huang Zi-Chao. Unified modeling of trajectory planning and tracking for unmanned vehicle. Acta Automatica Sinica, 2019, 45(4): 799-807 [14] 刘运通, 石建军, 熊辉. 交通系统仿真技术. 北京: 人民交通出版社, 2002.Liu Yun-Tong, Shi Jian-Jun, Xiong Hui. Traffic System Simulation Technology. Beijing: People's Communications Publishing House, 2002. [15] 袁清. 基于驾驶行为分析的自适应巡航控制算法研究 [硕士学位论文], 吉林大学, 中国, 2018.Yuan Qing. Adaptive Cruise Control Algorithm Based on Driving Behavior Analysis [Master thesis], Jilin University, China, 2018. [16] 祁智. 无人驾驶车辆换道与超车控制方法研究 [硕士学位论文], 燕山大学, 中国, 2017.Qi Zhi. Study on Lane-Changing and Overtaking Control Method of Autonomous Vehicle [Master thesis], Yanshan University, China, 2017. [17] 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述. 汽车安全与节能学报, 2016, 7(2): 151-159 doi: 10.3969/j.issn.1674-8484.2016.02.003Guo Jing-Hua, Li Ke-Qiang, Luo Yu-Gong. Review on the research of motion control for intelligent vehicles. Journal of Automotive Safety and Energy, 2016, 7(2): 151-159 doi: 10.3969/j.issn.1674-8484.2016.02.003 [18] Lu J B, Filev D, Prakah-Asante K, Tseng F, Kolmanovsky I V. From vehicle stability control to intelligent personal minder: Real-time vehicle handling limit warning and driver style characterization. In: Proceedings of the 2009 IEEE Workshop on Computational Intelligence in Vehicles and Vehicular Systems. Nashville, USA: IEEE, 2009. 43−50 -

 下载:
下载:






计量
- 文章访问数: 1865
- HTML全文浏览量: 1382
- PDF下载量: 312
- 被引次数: 0
