

Hierarchical Human-robot Cooperative Control Based on GPR and Deep Reinforcement Learning
-
摘要: 提出了一种基于高斯过程回归与深度强化学习的分层人机协作控制方法, 并以人机协作控制球杆系统为例检验该方法的高效性. 主要贡献是: 1)在模型未知的情况下, 采用深度强化学习算法设计了一种有效的非线性次优控制策略, 并将其作为顶层期望控制策略以引导分层人机协作控制过程, 解决了传统控制方法无法直接应用于模型未知人机协作场景的问题; 2)针对分层人机协作过程中人未知和随机控制策略带来的不利影响, 采用高斯过程回归拟合人体控制策略以建立机器人对人控制行为的认知模型, 在减弱该不利影响的同时提升机器人在协作过程中的主动性, 从而进一步提升协作效率; 3)利用所得认知模型和期望控制策略设计机器人末端速度的控制律, 并通过实验对比验证了所提方法的有效性.Abstract: In this paper, a hierarchical human-robot collaboration control problem is investigated by Gaussian process regression and deep reinforcement learning approaches, and a ball and beam system controlled jointly by human and robot is used to verify the proposed method. The main contributions are as follows: 1) To deal with the problem that the classical control method can not be directly used in the human-robot collaboration scenario without a known model, a deep reinforcement learning algorithm is adopted to design an effective nonlinear suboptimal policy without the system model, and this suboptimal policy is considered as the expected control policy to guide the Human-robot collaboration process; 2) To weaken the negative influences caused by the unknown and random human-control strategies, the Gaussian process regression method is used to fit the human-control strategies and build the cognitive model of robot for human control behaviors, which can improve the efficiency of collaboration by enhancing the initiative of the robot through the Human-robot collaboration process; 3) A controller for the end-effector velocity is designed based on the cognitive model and the expected control policy, and the effectiveness of the proposed method is verified by experimental comparison.
-

图 7 志愿者控制过程中产生数据的滤波结果图
Fig. 7 Filtering results of the data generated by volunteers' control process
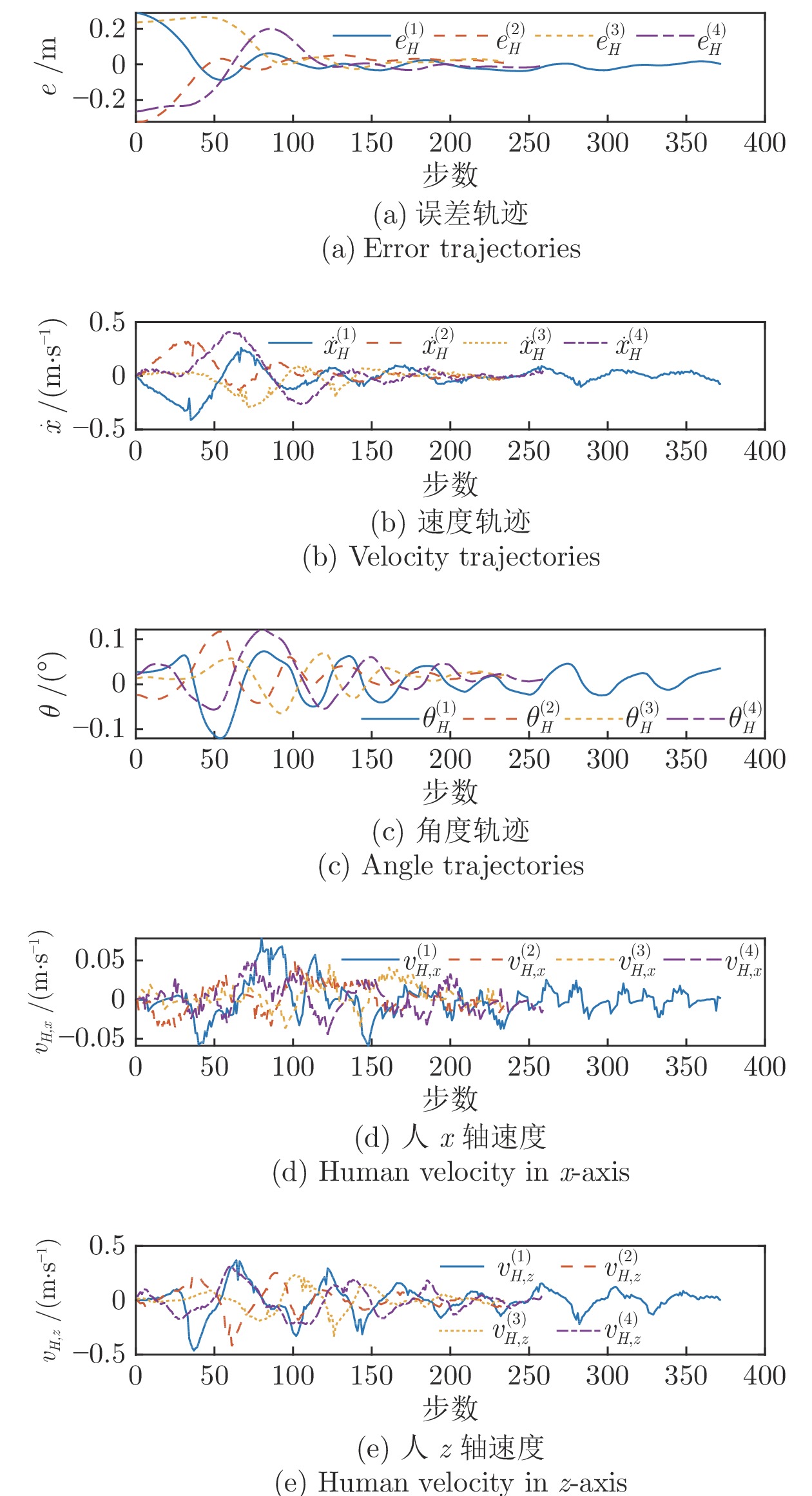
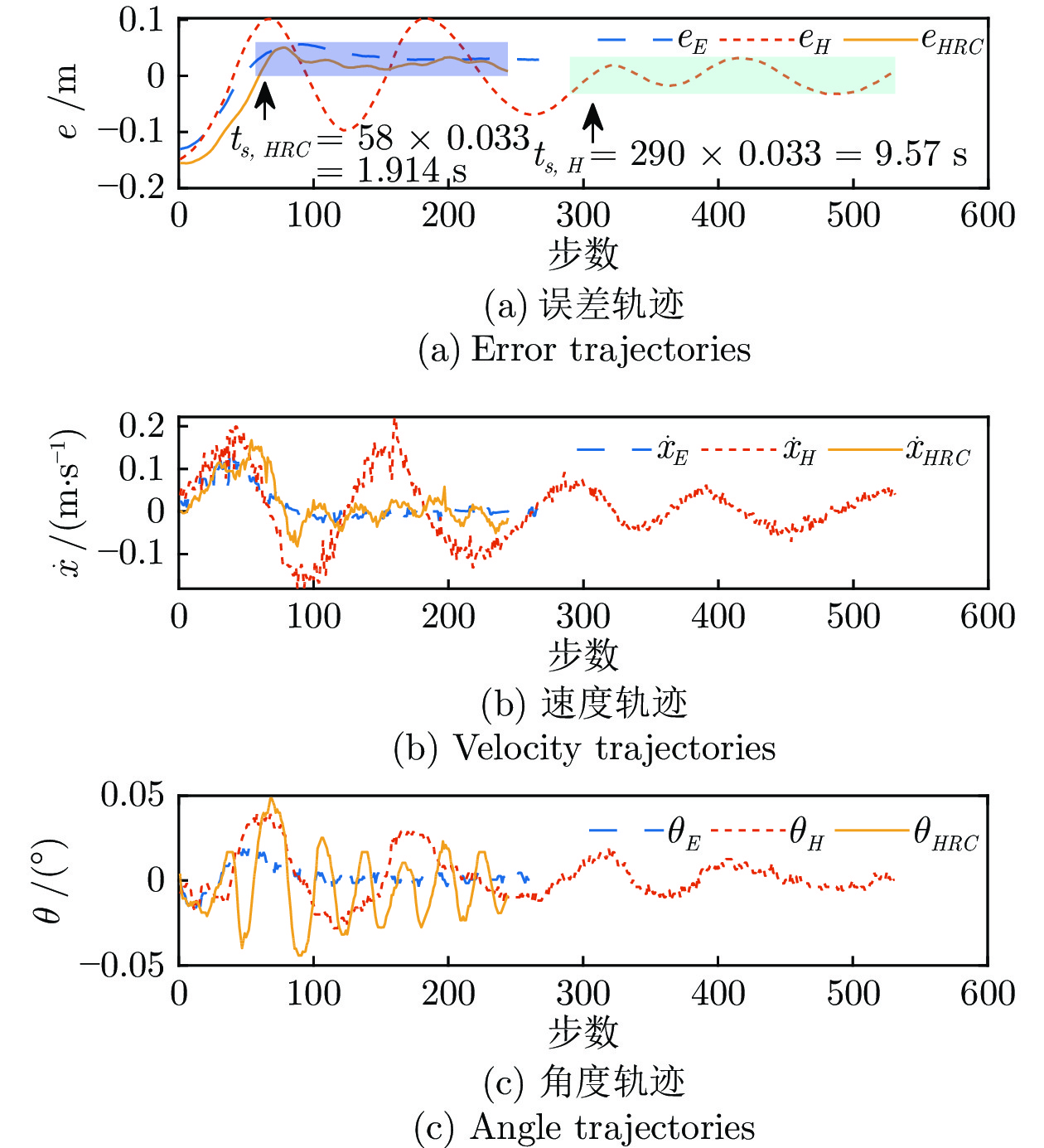
图 8 志愿者控制过程中产生的部分轨迹图
Fig. 8 Some trajectories generated by the volunteers' control process

图 9 人体控制策略预测模型拟合结果图
Fig. 9 The fitting results of human-control policy prediction model
-
[1] Amirshirzad N, Kumru A, Oztop E. Human adaptation to human–robot shared control. IEEE Transactions on Human-Machine Systems, 2019, 49(2): 126-136 doi: 10.1109/THMS.2018.2884719 [2] Wojtara Y, Murayama H, Howard M, Shimoda S, Sakai S, Fujimoto H, et al. Human-robot collaboration in precise positioning of a three-dimensional object. Automatica, 2009, 45(2): 333-342 doi: 10.1016/j.automatica.2008.08.021 [3] Dumora J, Geffard F, Bidard C, Brouillet T, Fraisse P. Experimental study on haptic communication of a human in a shared human-robot collaborative task. In: Proceedings of the 2012 IEEE/ RSJ International Conference on Intelligent Robots and Systems. Vilamoura, Portugal: IEEE, 2012. 5137−5144 [4] Karayiannidis Y, Smith C, Kragic D. Mapping human intentions to robot motions via physical interaction through a jointly-held object. In: Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication. Edinburgh, UK: IEEE, 2014. 391−397 [5] Karayiannidis Y, Smith C, Vina F E, Kragic D. Online kinematics estimation for active human-robot manipulation of jointly held objects. In: Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 4872−4878 [6] Burdet E, Milner T E. Quantization of human motions and learning of accurate movements. Biological cybernetics, 1998, 78(4): 307-318 doi: 10.1007/s004220050435 [7] Maeda Y, Hara T, Arai T. Human-robot cooperative manipulation with motion estimation. In: Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Maui, USA: IEEE, 2001. 2240−2245 [8] Corteville B, Aertbelien E, Bruyninckx H, Schutter J D, Brussel H V. Human-inspired robot assistant for fast point-to-point movements. In: Proceedings of the 2007 IEEE International Conference on Robotics and Automation. Roma, Italy: IEEE, 2007. 3639−3644 [9] Miossec S, Kheddar A. Human motion in cooperative tasks: Moving object case study. In: Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics. Bangkok, Thailand: IEEE, 2009. 1509−1514 [10] Sheng W H, Thobbi A, Gu Y. An integrated framework for human–robot collaborative manipulation. IEEE Transactions on Cybernetics, 2015, 45(10): 2030-2041 doi: 10.1109/TCYB.2014.2363664 [11] Thobbi A, Gu Y, Sheng W H. Using human motion estimation for human-robot cooperative manipulation. In: Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011. 2873−2878 [12] Deng Z, Mi J P, Han D, Huang R, Xiong X F, Zhang J W. Hierarchical robot learning for physical collaboration between humans and robots. In: Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics. Macau, China: IEEE, 2017. 750−755 [13] Agravante D J, Cherubini A, Bussy A, Kheddar A. Humanhumanoid joint haptic table carrying task with height stabilization using vision. In: Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 4609−4614 [14] Agravante D J, Cherubini A, Bussy A, Gergondet P, Kheddar A. Collaborative human-humanoid carrying using vision and haptic sensing. In: Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014. 607−612 [15] Mainprice J, Berenson D. Human-robot collaborative manipulation planning using early prediction of human motion. In: Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. Tokyo, Japan: IEEE, 2013. 299−306 [16] Maria K, Muhammad A H, Danijela R D, Axel G. Robot learning of industrial assembly task via human demonstrations. Autonomous Robots, 2019, 43(1): 239-257 doi: 10.1007/s10514-018-9725-6 [17] Ghadirzadeh A, Butepage J, Maki A, Kragic D, Bjorkman M. A sensorimotor reinforcement learning framework for physical human-robot interaction. In: Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon, South Korea: IEEE, 2016. 2682−2688 [18] Wang P, Liu H Y, Wang L H, Gao R X. Deep learning-based human motion recognition for predictive context-aware human-robot collaboration. CIRP Annals - Manufacturing Technology, 2018, 67(1): 17-20 doi: 10.1016/j.cirp.2018.04.066 [19] Wang Z, Peer A, Buss M. An HMM approach to realistic haptic human-robot interaction. In: Proceedings of the World Haptics 3rd Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems. Teleoperator System. Salt Lake City, USA: 2016. 374−379 [20] Mainprice J, Berenson D. Learning human-robot collaboration with POMDP. In: Proceedings of the 2013 International Conference on Control, Automation and Systems. Gyeongju, South Korea: IEEE, 2013. 1238−1243 [21] Hawkins K P, Vo N, Bansal S, Bobick A F. Probabilistic human action prediction and wait-sensitive planning for responsive human-robot collaboration. In: Proceedings of the 2013 13th IEEE-RAS International Conference on Humanoid Robots. Atlanta, USA: 2013. 499−506 [22] Lillicrap T P, Hunt J J, Pritzel A, Heess N, Erez T, Silver D, et al. Continuous control with deep reinforcement learning. In: Proceedings of the 2016 International Conference on Learning Representations. San Juan, Puerto Rico: IEEE, 2016. 1−14 [23] Mnih V, Kavukcuoglu K, Silver D, Rusu A A, Veness J, Bellemare M G, et al. Human-level control through deep reinforcement learning. Nature, 2015, 518(7540): 529-533 doi: 10.1038/nature14236 [24] Hado V H, Guez A, Silver D. Deep reinforcement learning with double Q-learning. In: Proceedings of the 2016 AAAI Conference on Artificial Intelligence. Arizona, USA: 2016. 2094−2100 [25] Silver D, Lever G, Hess N, Degris T, Wierstra D, Riedmiller M. Deterministic policy gradient algorithms. In: Proceedings of the 2014 International Conference on Machine Learning. Beijing, China: 2014. 605−619 [26] Espersson M. Vision Algorithms for Ball on Beam and Plate[Master thesis], Lund University, Sweden, 2010 -

 下载:
下载:




图(12)
计量
- 文章访问数: 1821
- HTML全文浏览量: 837
- PDF下载量: 412
- 被引次数: 0
