

Fault Testing and Validation Simulation Platform for Traction Drive System of High-speed Trains
-
摘要: 牵引传动系统作为高速列车能量传递与转换的核心部分, 是保障高铁安全稳定运行的关键系统之一. 故障测试与验证平台是确保实时故障诊断技术在高速列车上有效应用的重要手段和途径. 围绕高速列车牵引传动系统故障测试与验证平台中面临的挑战性问题和关键技术, 本文从故障注入、仿真可信度评估、算法性能评估和仿真平台实现等方法和技术方面进行分析, 并针对上述难题概述了一些解决方案, 提出并构建了一种集高速列车实时仿真、故障运行行为逼真模拟以及随机故障测试和故障诊断算法评估于一体的牵引传动系统故障测试与验证实时仿真平台. 最后, 总结展望了高速列车安全监测验证平台未来研究方向.
-
关键词:
- 故障测试 /
- 验证平台 /
- 故障注入 /
- 测试评估 /
- 高速列车牵引传动系统
Abstract: As the power system of high-speed train, the traction drive system is one of the key systems to guarantee the safe and stable operation for high-speed train. Fault testing and verification platform is an important way to ensure the effective application of real-time fault diagnosis methods on high-speed trains. Focusing on the challenging issues in the fault testing and verification platform of the traction drive system of high-speed train, this paper analyzes the methods and technologies of fault injection, simulation reliability evaluation, algorithm performance evaluation and simulation platform implementation, and summarizes some solutions to the above problems. Moreover, this paper further proposes and builds a fault testing verification platform for high-speed train traction drive system, which integrates real-time simulation of high-speed train, realistic simulation for fault scenarios, random fault testing and fault diagnosis algorithm evaluation. Finally, the future research direction of the safety monitoring and verification platform for high-speed trains is summarized and prospected. -

图 3 高速列车信息控制系统故障测试实时仿真系统架构
Fig. 3 Real-time simulation system architecture for the fault testing and verification of information control system in high-speed train
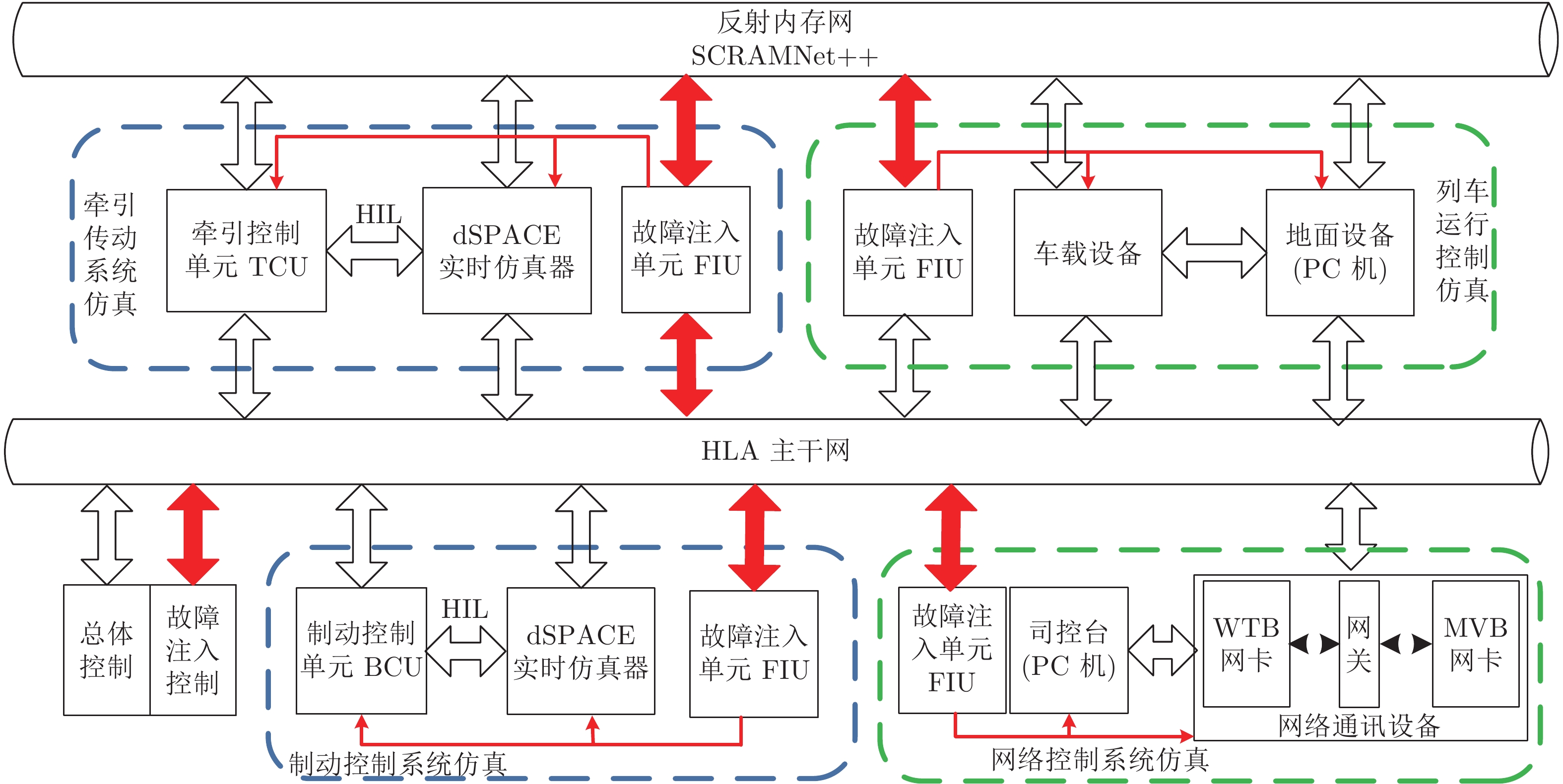
图 4 基于HLA-RTI的高速列车信息控制系统故障测试与验证实时仿真结构
Fig. 4 HLA-RTI-based real-time simulation architecture the fault testing and verification of information control system in high-speed train


图 9 牵引传动系统故障测试软件的用户界面
Fig. 9 The user interface of fault testing software of traction drive system
表 1 平台实现方式的对比
Table 1 Comparison of platform implementation schemes
实现
方式实验
成本测试数据
可信度模拟故障
危险性测试
周期平台实现
难易实物 高 高 高 慢 难 虚拟 低 低 低 中 易 半实物 中 中 中 快 中  下载: 导出CSV
下载: 导出CSV
表 2 现有具备故障模拟功能的高速列车验证平台对比
Table 2 Comparison of the existing high-speed train verification platform with fault simulation injection
实现方式 可控性 故障场景的覆盖面 实时性 实物 手动为主,
可控性差硬件故障为主 满足算法实时性测试 虚拟 自动操作,
可控性高故障类型限制小 不满足算法实时性测试 半实物 自动操作,
可控性高个别元部件、简单故障,
难以模拟复杂故障场景基本满足算法实时性测试
下载: 导出CSV
表 3 实时仿真器不同处理器芯片的对比
Table 3 Comparison of different processor chips in real-time simulator
芯片 运算
方式运算
频率平均耗时
范围运算负载
影响单价 不足 DSP 串行 GHz 毫秒-
微秒级大 低 模型平均解算速度
慢, 且与模型解算
规模成反比FPGA 并行 MHz 纳秒级 小 高 资源有限,
时序受约束
下载: 导出CSV
表 4 三级故障测试性能评估指标
Table 4 Three-level-based performance evaluation index for fault testing
综合性能指标 关键性能指标 基本性能指标 综合性能指标 可维修性指标群 平均检测延迟 灵敏度 检测可用性指标群 检测率 误检率 漏检率 诊断可靠性指标群 故障位置辨识率 故障类型辨识率 故障参数辨识率
下载: 导出CSV
-
[1] 秦勇, 马慧, 贾利民. 先进轨道交通系统发展趋势与主动安全保障技术. 中国铁路, 2015, 2015(12): 77−811 Qin Yong, Ma Hui, Jia Li-Min. Development trend and active safety technology for advanced rail transit system. China Railway, 2015, 2015(12): 77−81 [2] 2 Chen C L. Reshaping Chinese space-economy through high-speed trains: opportunities and challenges. Journal of Transport Geography, 2012, 22(2): 312−316 [3] 杨戈. 复兴路上驶来" 复兴号”. 中国科技奖励, 2017, 2017(8): 20−233 Yang Ge. Fuxing bullet train on the revival road. China Awards for Science and Technology, 2017, 2017(8): 20−23 [4] 李拯. 从" 复兴号”启程看弯道超车. 人民日报, 2017-06-27(005)Li Zheng, Starting from " Fuxing” to see overtaking in corners. People′s Daily, 2017-06-27(005) [5] 国家发展和改革委员会. 铁路" 十三五”发展规划[Online], available: http://www.ndrc.gov.cn/gzdt/201711/t20171124_867822.html. 2019年12月9日National Development and Reform Commission. The " 13th five-year” development plan for railway [Online], available: http://www.ndrc.gov.cn/gzdt/201711/t20171124_867822.html. December 9, 2019 [6] 姜斌, 吴云凯, 陆宁云, 冒泽慧. 高速列车牵引系统故障诊断与预测技术综述. 控制与决策, 2018, 33(5): 841−8556 Jiang Bin, Wu Yun-Kai, Lu Ning-Yun, Mao Ze-Hui. Review of fault diagnosis and prognosis techniques for high-speed railway traction system. Control and Decision, 2018, 33(5): 841−855 [7] 戴舜华. CRH2型系列动车组牵引变流器介绍及故障分析. 铁道机车车辆, 2013, 33(2): 93−977 Dai Shun-Hua. Introduction and failure analysis of traction converter for CRH2 EMUs. Railway Locomotive and Car, 2013, 33(2): 93−97 [8] 8 Ge X, Pu J, Gou B, Liu Y. An open-circuit fault diagnosis approach for single-phase three-level neutral-point-clamped converters. IEEE Transactions on Power Electronics, 2018, 33(3): 2559−2570 doi: 10.1109/TPEL.2017.2691804 [9] 9 Fernando G, Javier P, Patxi M, Jon D O, Gaizka A. A review in fault diagnosis and health assessment for railway traction drives. Applied Sciences, 2018, 8(12): 2475−2494 doi: 10.3390/app8122475 [10] 10 Zhang K K, Jiang B, Yan X G, Shen J. Interval sliding mode observer based incipient sensor fault detection with application to a traction device in china railway high-speed. IEEE Transactions on Vehicular Technology, 2019, 68(3): 2585−2597 doi: 10.1109/TVT.2019.2894670 [11] 尹进田, 谢永芳, 阳春华. 基于RVMD的牵引电机转子初期断条故障监测. 控制与决策, 2018, 33(03): 497−50211 Yin Jin-Tian, Xie Yong-Fang, Yang Chun-Hua. Monitoring of incipient rotor bars broken fault in traction motors based on RVMD method. Control and Decision, 2018, 33(03): 497−502 [12] 12 Chen Z, Li X, Yang C, Peng T, Yang C, Karimi H R, Gui W. A data-driven ground fault detection and isolation method for main circuit in railway electrical traction system. ISA Transactions, 2019, 87: 264−271 doi: 10.1016/j.isatra.2018.11.031 [13] 陶宏伟, 彭涛, 杨超, 阳春华, 陈志文, 桂卫华. 高速列车牵引整流器多类故障联合诊断方法. 自动化学报, 2019, 45(12): 2294−230213 Tao Hong-Wei, Peng Tao, Yang Chao, Yang Chun-Hua, Chen Zhi-Wen, Gui Wei-Hua. Joint fault diagnosis method of multiclass faults for traction rectifler in high-speed train. Acta Automatica Sinica, 2019, 45(12): 2294−2302 [14] 周东华, 纪洪泉, 何潇. 高速列车信息控制系统的故障诊断技术. 自动化学报, 2018, 44(7): 1153−116414 Zhou Dong-Hua, Ji Hong-Quan, He Xiao. Fault diagnosis techniques for the information control system of high-speed trains. Acta Automatica Sinica, 2018, 44(7): 1153−1164 [15] 15 Dong H, Lin X, Yao X, Bai W, Ning B. Composite disturbance- observer-based control and H∞ control for high speed trains with actuator faults. Asian Journal of Control, 2018, 20(2): 735−745 doi: 10.1002/asjc.1590 [16] 16 Fernando G, Jon D O, Javier P, Patxi M, Gaizka A. Integral sensor fault detection and isolation for railway traction drive. Sensors, 2018, 18(5): 1543−1562 doi: 10.3390/s18051543 [17] 17 Alejandro B, Higinio R, Cristina C, García-Prada J C. EMD-based methodology for the Identification of a high-speed train running in a gear operating state. Sensors, 2018, 18(3): 793−809 doi: 10.3390/s18030793 [18] 18 Rankin D J, Jiang J. A hardware-in-the-loop simulation platform for the verification and validation of safety control systems. IEEE Transactions on Nuclear Science, 2011, 58(2): 468−478 doi: 10.1109/TNS.2010.2103325 [19] 丁荣军, 桂卫华, 陈高华. 电力机车交流传动系统的半实物实时仿真. 中国铁道科学, 2008, 29(4): 96−10219 Ding Rong-Jun, Gui Wei-Hua, Chen Gao-Hua. HIL real-time simulation of electric locomotive AC drive system. China Railway Science, 2008, 29(4): 96−102 [20] 20 Lv C, Cao D P, Zhao Y F, Auger D J, Sullman M, Wang H J, Dutka L M, Skrypchuk L, Mouzakitis A. Analysis of autopilot disengagements occurring during autonomous vehicle testing. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 56−68 [21] 李天梅. 装备测试性验证试验优化设计与综合评估方法研究[博士学位论文]. 国防科学技术大学, 中国, 2010.Li Tian-Mei. Research on optimization design and integrated evaluation of testability verification test for equipments [Ph.D. dissertation]. National University of Defense Technology, China, 2010. [22] 黄振晖, 王贵国, 蒋大旺, 曹源, 张玉琢. 国内外高速试验列车综述. 中国铁路, 2013, (4): 100−10522 Huang Zhen-Hui, Wang Gui-Guo, Jiang Da-Wang, Cao Yuan, Zhang Yu-Zhuo. Summary of high-speed test trains at home and abroad. China Railway, 2013, (4): 100−105 [23] ALSTOM, The AGV, Alstom′s latest very high-speed train, starts test runs at 360 km/h [Online], available: https://www.alstom.com/press-releases-news/2008/12/The-AGV-Alstoms-latest-very-high-speed-train-starts-test-runs-at-360-km-h-20081208. December 5, 2019 [24] Ji H Q, He X, Sai H S, Tai X H, Zhou D H. Fault detection of EMU brake cylinder. In: Proceedings of the 35th Chinese Control Conference (CCC). Chengdu, China: IEEE, 2016. 6668−6672 [25] Fang X, Yang Z, Lin F. Virtual development platform of high-speed train traction drive system in view of top-level goals. In: Proceedings fo the 2013 Vehicle Power and Propulsion Conference (VPPC). Beijing, China: IEEE, 2013. 1−5 [26] 26 Feng J, Cao J, Wu Z. Analysis and study of the influence on the train side harmonic as a SMES fabricated into the EMU converter system. IEEE Transactions on Applied Super-Conductivity, 2019, 29(2): 1−5 [27] 27 Zhou Y H, Xin T, Lei L, Ning J J. Revisiting the 7/23 train accident using computer reconstruction simulation for causation and prevention analysis. Mathematics and Computers in Simulation, 2018, 2018(148): 1−15 [28] 28 Gao S, Dong H, Ning B. Adaptive fault-tolerant automatic train operation using RBF neural networks. Neural Computing and Applications, 2015, 2015(26): 141−149 [29] 杨笑悦. 高速列车牵引传动控制系统故障实时仿真与诊断方法研究[博士学位论文]. 中南大学, 中国, 2018.Yang Xiao-Yue. Real-time fault simulation and diagnosis for traction control system of high-speed train [Ph.D. dissertation]. Central South University, China, 2018. [30] 30 Liu Z, Xiang C, Wang Y, Liao Y, Zhang G. A model-based predictive direct power control for traction line-side converter in high-speed railway. IEEE Transactions on Industry Applications, 2017, 53(5): 4934−4943 doi: 10.1109/TIA.2017.2714624 [31] 31 Song W, Jiao S, Li W, Wang J, Huang J. High-frequency harmonic resonance suppression in high-speed railway through single-phase traction converter with LCL filter. IEEE Transactions on Transportation Electrification, 2016, 2(3): 347−356 doi: 10.1109/TTE.2016.2584921 [32] 冯江华, 王坚, 李江红. 高速列车牵引传动系统综合仿真平台的分析与设计. 铁道学报, 2012, 34(2): 21−2632 Feng Jiang-Hua, Wang Jian, Li Jiang-Hong. Integrated simulation platform of high-speed train traction drive system. Journal of the China Railway Society, 2012, 34(2): 21−26 [33] Xia J, Guo Y, Dai B, Zhang X. Sensor fault tolerant control method for electric traction PWM rectifier using sliding mode observer. In: Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan. 2016, 1−6 [34] 34 Willian T H, George M B. Design of built-in tests for active fault detection and isolation of discrete faults. IEEE Access, 2018, 6(2018): 50959−50973 [35] 郝春生, 秦月. 航空发动机故障诊断方法及测试流程分析. 航空发动机, 2014, 40(3): 71−7435 Hao Chun-Sheng, Qin Yue. Fault diagnosis methods and testing procedure of aeroengine. Aeroengine, 2014, 40(3): 71−74 [36] 柴毅, 毛万标, 任浩, 屈剑锋, 尹宏鹏, 杨志敏, 等. 航天发射系统运行安全性评估研究进展与挑战. 自动化学报, 2019, 45(10): 1829−184536 Chai Yi, Mao Wan-Biao, Ren Hao, Qu Jian-Feng, Yin Hong-Peng, Yang Zhi-Min, et al. Research on operational safety assessment for spacecraft launch system: Progress and challenges. Acta Automatica Sinica, 2019, 45(10): 1829−1845 [37] 37 Cunningham A, Kass M. Development, integration, and test architecture for a software-based hardware-agnostic fault tolerant flight computer. IEEE Instrumentation and Measurement Magazine, 2016, 19(4): 38−43 [38] 38 Ananda C M. General aviation aircraft avionics: Integration and system tests. IEEE Aerospace and Electronic Systems Magazine, 2009, 24(5): 19−25 doi: 10.1109/MAES.2009.5109949 [39] 39 Shi Y, Wu X, Chen H, Xu T. A research of weapon system storage reliability simulation method based on fuzzy theory. Physics Procedia: Part C, 2012, 24: 2266−2272 doi: 10.1016/j.phpro.2012.02.334 [40] 李玉洁, 吴延军. 武器装备的测试性设计方法研究. 舰船电子工程, 2017, 37(11): 126−12940 Li Yu-Jie, Wu Yan-Jun. Methods study for testability of weapon equipment. Ship Electronic Engineering, 2017, 37(11): 126−129 [41] 杨金鹏, 连光耀, 邱文昊, 陈然. 装备测试性验证技术研究现状及发展趋势. 现代防御技术, 2018, 46(2): 186−19241 Yang Jin-Peng, Lian Guang-Yao, Qiu Wen-Hao, Chen Ran. Research status and development trend of equipment testability verification technology. Modern Defence Technology, 2018, 46(2): 186−192 [42] 张艳红, 易志虎. 导弹故障诊断系统中的故障注入方法研究. 弹箭与制导学报, 2007, 2007(3): 292−29442 Zhang Yan-Hong, Yi Zhi-Hu. Research of fault injection in missile fault diagnosis system. Journal of Projectiles, Rockets, Missiles and Guidance, 2007, 2007(3): 292−294 [43] Johnson B W, Smith D T, DeLong T A. A Survey of Fault Simulation, Fault Grading and Test Pattern Generation Techniques with Emphasis on the Feasibility of VHDL Based Fault Simulation. Virginia University Charlottesville, 1997. [44] 44 Hsueh M C, Tsai T K, Iyer R K. Fault injection techniques and tools. Computer, 1997, 30(4): 75−82 doi: 10.1109/2.585157 [45] 45 Lago L D, Ferrante O, Passerone R, Ferrari A. Dependability assessment of SOA-based CPS with contracts and model-based fault injection. IEEE Transactions on Industrial Informatics, 2018, 14(1): 360−369 doi: 10.1109/TII.2017.2689337 [46] Kooli M, Di Natale G. A survey on simulation-based fault injection tools for complex systems. In: Proceedings of the 9th IEEE International Conference on Design and Technology of Integrated Systems in Nanoscale Era (DTIS), Santorini, Greece. 2014. 1−6 [47] 崔恒斌, 马志文, 韩坤, 冯晓云, 仝力. 电动车组牵引传动系统的实时仿真研究. 中国铁道科学, 2011, 32(6): 94−10147 Cui Heng-Bin, Ma Zhi-Wen, Han Kun, Feng Xiao-Yun, Tong Li. Research on the real-time simulation of the traction drive system in electric multiple units. China Railway Science, 2011, 32(6): 94−101 [48] 48 Zhang Y, Tang T, Zheng W, Niu H. A train control system simulation and analysis method. International Journal of Simulation and Process Modelling, 2012, 7(1): 57−66 [49] 王子才. 仿真科学的发展及形成. 系统仿真学报, 2005, 17(6): 1279−128149 Wang Zi-Cai. Development and formation of simulation science. Journal of System Simulation, 2005, 17(6): 1279−1281 [50] 李伟, 林圣琳, 周玉臣, 马萍, 杨明. 复杂仿真系统可信度评估研究进展. 中国科学: 信息科学, 2018, 48(7): 29−4450 Li Wei, Lin Sheng-Lin, Zhou Yu-Chen, Ma Ping, Yang Ming. Research progress on credibility assessment of a complex simulation system. Scientia Sinica Imformationis, 2018, 48(7): 29−44 [51] 李军, 苑士华. 车辆动力学仿真的可信度评估方法研究. 北京理工大学学报, 2015, 35(1): 44−4751 Li Jun, Yuan Shi-Hua. Research on credibility evaluation method applied to vehicle dynamic simulation. Transactions of Beijing Institute of Technology, 2015, 35(1): 44−47 [52] 高文天, 吴勇, 张建东, 田海宝, 焦敬涛. 改进型灰色聚类法对航电火控系统仿真可信度评估. 火力与指挥控制, 2012, 37(4): 54−57 doi: 10.3969/j.issn.1002-0640.2012.04.01452 Gao Wen-Tian, Wu Yong, Zhang Jian-Dong, Tian Hai-Bao, Jiao Jing-Tao. A grey theory model using in the simulation credibility evaluation of integrative avionics system. Fire Control and Command Control, 2012, 37(4): 54−57 doi: 10.3969/j.issn.1002-0640.2012.04.014 [53] 53 Fang K, Yang M. Dynamic AHP net for simulation systems verification. Systems Engineering and Electronics, 2011, 33(3): 707−711 [54] 豆建斌, 王小兵, 单斌, 张燕. 制导武器半实物仿真试验可信度评估研究. 系统仿真学报, 2017, 29(12): 3023−302954 Dou Jian-Bin. Wang Xiao-Bing, Shan Bin, Zhang Yan. Credibility evaluation of hardware-in-the-loop simulation test for guided weapons. Journal of System Simulation, 2017, 29(12): 3023−3029 [55] Yang C, Gui W, Chen Z, Zhang J, Tao P, Yang C, et al. Voltage difference residual-based open-circuit fault diagnosis approach for three-level converters in electric traction systems. IEEE Transactions on Power Electronics, to be published. [56] 56 Tao H W, Peng T, Yang C, Chen Z W, Yang C H, Gui W H. Open-circuit fault analysis and modeling for power converter based on single arm model. Electronics, 2019, 8(6): 633−648 doi: 10.3390/electronics8060633 [57] 57 Chen Z, Ding S, Peng T, Yang C, Gui W. Fault detection for non-gaussian processes using generalized canonical correlation analysis and randomized algorithms. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1559−1567 doi: 10.1109/TIE.2017.2733501 [58] 58 Chen H, Jiang B, Lu N, Mao Z. deep PCA based real-time incipient fault detection and diagnosis methodology for electrical drive in high-speed trains. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4819−4830 doi: 10.1109/TVT.2018.2818538 [59] 59 Chen H, Jiang B, Chen W, Yi H. Data-driven detection and diagnosis of incipient faults in electrical drives of high-speed trains. IEEE Transactions on Industrial Electronics, 2019, 66(6): 4716−4725 doi: 10.1109/TIE.2018.2863191 [60] 国家标准. GB/T 21562-2008. 轨道交通-可靠性、可用性、可维修性和安全性规范及示例. 2008.National Standard. GB/T 21562-2008: Railway applications — specification and demonstration of reliability, maintainabilitylity and safety (RAMS). 2008. [61] 61 Rubaai A, Ofoli A R, Cobbinah D. DSP-based real-time implementation of a hybrid H1 adaptive fuzzy tracking controller for servo-motor drives. IEEE Transactions on Industry Applications, 2007, 43(2): 476−484 doi: 10.1109/TIA.2006.889904 [62] 62 Pak L F, Faruque M O, Nie X, Dinavahi V. A versatile cluster-based real-time digital simulator for power engineering research. IEEE Transactions on Power System, 2006, 21(2): 455−465 doi: 10.1109/TPWRS.2006.873414 [63] Dufour C, Blanger J. A PC-based real-time parallel simulatorof electric systems and drive. In: Proceedings of the 2004 International Conference on Parallel Computing in Electrical Engineering, Dresden, Germany: IEEE, 2004. 105−113 [64] RTDS Technology Incorporated. Real-Time Simulation [Online], available: http://www.rtds.com. December 5, 2019 [65] dSPACE GmbH. dSPACE Product Manual [Online], available: http://www.dspace.com. December 9, 2019 [66] 66 Chen Y, Dinavahi V. Multi-FPGA digital hardware design for detailed large-scale real-time electromagnetic transient simulation of power systems. IET Generation Transmission and Distribution, 2013, 7(5): 13−20 [67] 67 Saad H, Member S, Ould-bachir T, Mahseredjian J, Dufour C. Real-Time Simulation of MMCs Using. IEEE Transactions on Power Electronics, 2015, 36(1): 259−267 [68] 阳春华, 冯江华, 彭涛, 尚敬, 杨笑悦, 张宇, 杨超, 徐立恩. 一种高速列车信息控制系统协同故障仿真系统, 中国专利ZL201510362521.6, 2017年10月13日Yang Chun-Hua, Feng Jiang-Hua, Peng Tao, Shang Jing, Yang Xiao-Yue, Zhang Yu, Yang Chao, Xu Li-En. A collaborative fault simulation system for high-speed train information control system, Chian Patent ZL201510362521.6, October 13, 2017 [69] 阳春华, 杨超, 彭涛, 陶宏伟, 赵帅, 史露, 尹进田, 杨笑悦, 贺泽洲, 刘博, 李晟, 故障注入方法及系统, 中国专利ZL201710003376.1, 2019年8年30日Yang Chun-Hua, Yang Chao, Peng Tao, Tao Hong-Wei, Zhao Shuai, Shi Lu, Yin Jin-Tian, Yang Xiao-Yue, He Ze-Zhou, Liu Bo, Li Sheng. A fault injection method and its system, China Patent ZL201710003376.1, August 30, 2019 [70] 尹进田, 谢永芳, 陈志文, 彭涛, 阳春华, 杨超. 基于故障传播与因果关系的故障溯源方法及其在牵引传动控制系统中的应用. 自动化学报, 2019, DOI: 10.16383/j.aas.c19025Yin Jin-Tian, Xie Yong-Fang, Chen Zhi-Wen, Peng Tao, Yang Chun-Hua, Yang Chao. Fault tracing method based on fault propagation and causality with its application to the traction drive control system. Acta Automatica Sinica, 2019, DOI: 10.16383/j.aas.c19025 [71] 彭涛, 赵帅, 阳春华, 史露, 杨超, 尹进田, 杨笑悦、贺泽洲, 刘博, 陶宏伟, 李晟, 鼠笼型异步电机转子导条故障注入方法及故障注入器, 中国专利CN 201611107891.6, 2016年12月6日Peng Tao, Zhao Shuai, Yang Chun-Hua, Shi Lu, Yang Chao, Yin Jin-Tian, Yang Xiao-Yue, He Ze-Zhou, Liu Bo, Tao Hong-Wei, Li Sheng. Fault injection method and fault injector for the rotor bar of squirrel cage asynchronous motor, Patent CN 201611107891.6, December. 6, 2016 [72] 72 Yang C, Yang C, Peng T, Yang X, Gui W. A fault-injection strategy for traction drive control systems. IEEE Transactions on Industrial Electronics, 2017, 64(7): 5719−5727 doi: 10.1109/TIE.2017.2674610 [73] 杨笑悦, 阳春华, 彭涛, 等. 基于替代模型的单粒子瞬态效应注入. 上海应用技术学院学报(自然科学版), 2015, 150(3): 299−30473 Yang Xiao-Yue, Yang Chun-Hua, Peng Tao, Lu Shi, Yang Chao. Single event transient injection method based on substitution model. Journal of Shanghai Institute of Technology (Natural Science), 2015, 150(3): 299−304 [74] 74 Tao H, Peng T, Yang C,. Chen Z, Yang C, Gui W, Hamid R K. A uniform modeling method based on open-circuit faults analysis for NPC-three-level converter. IEEE Transactions on Circuits and Systems II: Express Briefs, 2019, 66(3): 457−461 doi: 10.1109/TCSII.2018.2856862 [75] Li S, Peng X, Peng T. A group evaluation method for complex simulation system credibility based on 2-order additive fuzzy measure. In: Proceedings of the 2016 Chinese Control and Decision Conference (CCDC2016). Yinchuan, China: IEEE, 2016. 147−154 [76] 李晟, 彭小奇, 彭涛. 基于关联群广义直觉模糊软集的仿真可信度指标聚合方法. 控制与决策, 2018, 33(1): 126−13476 Li Sheng, Peng Xiao-Qi, Peng Tao. Aggregation method for simulation credibility index based on group generalized intuitionistic fuzzy soft sets with correlations. Control and Decision, 2018, 33(1): 126−134 [77] 彭涛, 方帝凯, 杨超, 陈志文, 陶宏伟, 桂卫华, 提军伟. 一种基于随机故障注入的诊断算法评估方法, 中国专利CN201811638187.2, 2018年12月30日Peng Tao, Fang Di-Kai, Yang Chao, Chen Zhi-Wen, Tao Hong-Wei, Gui Wei-Hua, Ti Jun-Wei. A random fault injection-based diagnosis algorithm evaluation method, China Patent CN201811638187.2, December 30, 2018 [78] 78 Yang X, Yang C, Peng T, Chen Z, Liu B, Gui W. Hardware-in-the-loop fault injection for traction control system. IEEE Journal on Emerging and Selected Topics in Power Electronics, 2018, 6(2): 696−706 doi: 10.1109/JESTPE.2018.2794339 [79] 中南大学. 基于dSPACE的牵引传动控制系统故障测试软件(D-TDCS-FT, v1.0). 中国软件著作权2018sr878040, 2018年10月10日Central South University. dSPACE-based fault testing software for traction drive control system (D-TDCS-FT, v1.0). China Software Copyright 2018sr878040, October 10, 2018 [80] Laboratory of Energy Saving Control and Safety Monitoring for Rail Transportation [Online], available: http://gfist.csu.edu.cn/IndexE.html, December 9, 2019 [81] 81 Wang H, Liserre M, Blaabjerg F, Rimmen P P, Jackbsen J B, Kvisgaard T, Landkildehus J. Transitioning to physics-of-failure as a reliability driver in power electronics. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2014, 2(1): 97−114 doi: 10.1109/JESTPE.2013.2290282 [82] 82 Schleich B, Anwer N, Mathieu L, Wartzack, S. Shaping the digital twin for design and production engineering. CIRP Annals - Manufacturing Technology, 2017, 66(1): 141−144 doi: 10.1016/j.cirp.2017.04.040 [83] 83 Tuegel E J, Ingraffea A R, Eason T G, Spottswood S M. Reengineering aircraft structural life prediction using a digital twin. International Journal of Aerospace Engineering, 2011, 2011: 1687−5966 -

 下载:
下载:



计量
- 文章访问数: 9289
- HTML全文浏览量: 1833
- PDF下载量: 392
- 被引次数: 0
