

Research on Efficient Algorithm of Robot Along the Wall Combined With Historical Motion State
-
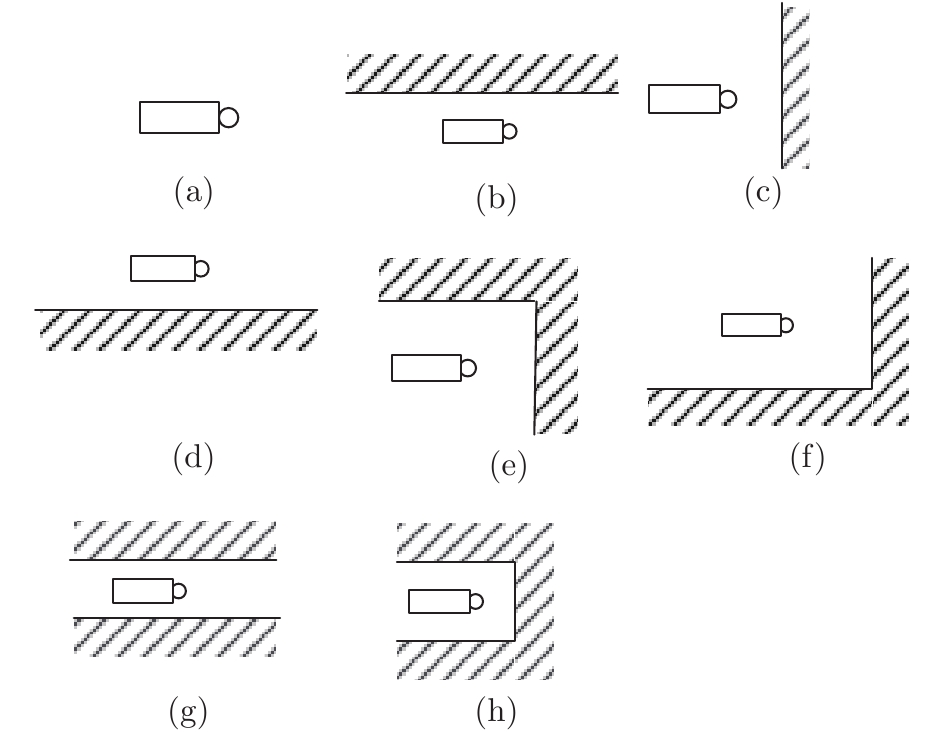
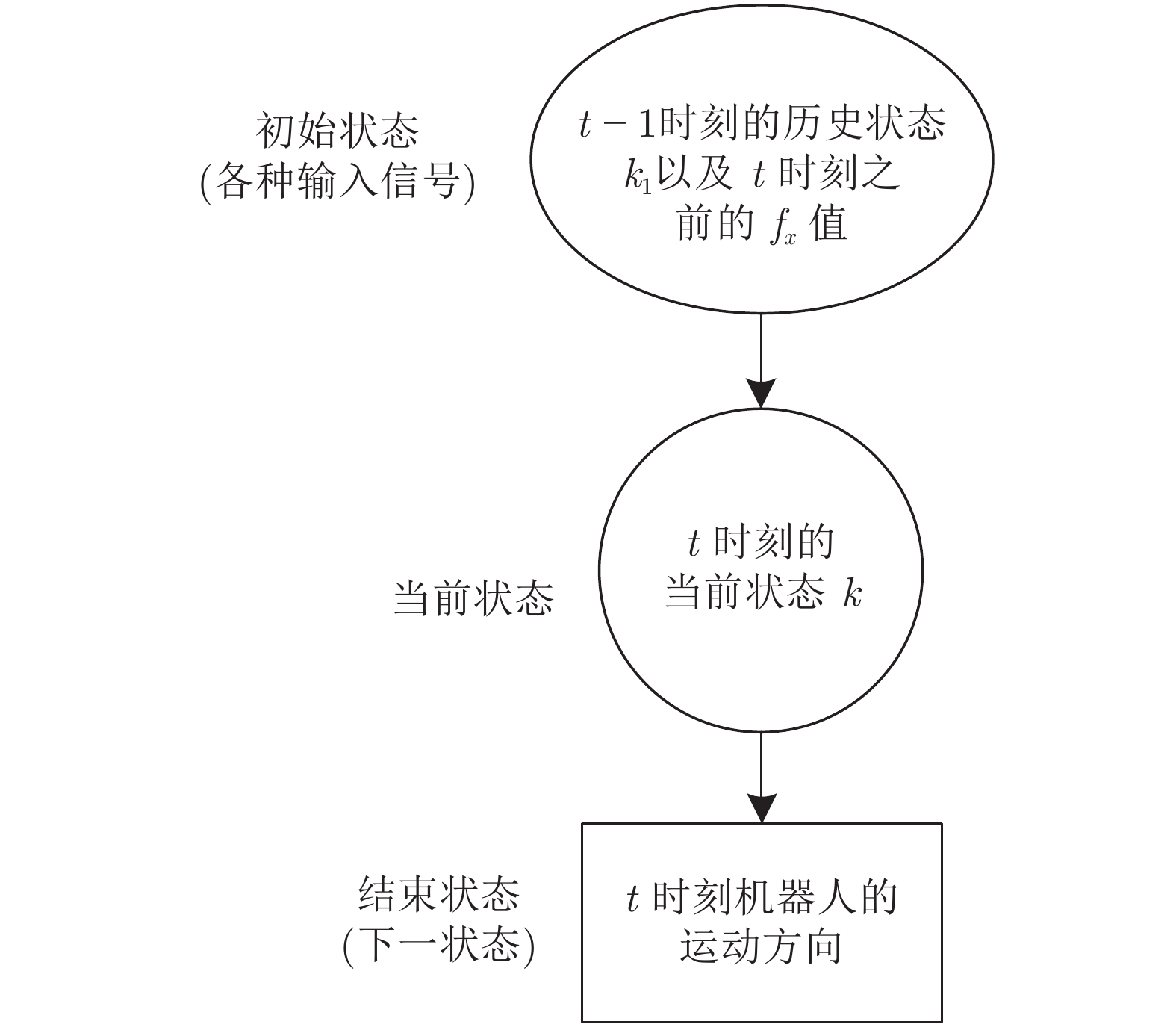
摘要: 针对目前室内移动机器人沿墙走算法过于复杂、路径易重复、不能完全遍历、效率低等问题, 采用室内未知环境下结合历史状态的机器人沿墙高效遍历研究来解决这些问题. 该算法由移动机器人的上一个周期历史环境运动状态(分8类)、当前环境运动状态(分8类)和旋向信息(分2类)建立运动规则库, 沿墙行走时移动机器人时时采集这三类信息(上一个周期历史环境运动状态、当前环境运动状态和旋向信息)决定移动机器人当前的运动方向, 如此循环直到完成指定的沿墙任务. 最后对该算法进行了仿真与实际实验, 实验结果证明该算法可以在不同的、复杂的环境中高效、快速地完成沿墙走的任务, 并且对室内未知环境有很好的适应性.Abstract: The indoor mobile robots moving along the wall will encounter the issue of complex algorithm, easy repetitive path, partial traversal and low efficiency, to end these problems, efficient traversal research of robots along the wall in the unknown environment is proposed in this work. The algorithm establishes a motion rule based on the previous cycle historical environment motion state of the mobile robot (in 8 categories), the current environmental motion state (in 8 categories), and the direction information (in 2 categories). The mobile robot collects timely while walking along the wall. These three types of information (previous cycle historical environment motion state, current environmental motion state, and direction information) determine the current motion direction of the mobile robot, and thus cycle until the specified wall-to-wall task is completed. Finally, the algorithm is simulated and experimented. The experimental results show that the algorithm can efficiently and quickly complete the task along the wall in different and complex environments, which indicates that the algorithm has good adaptability to indoor unknown environment.
-
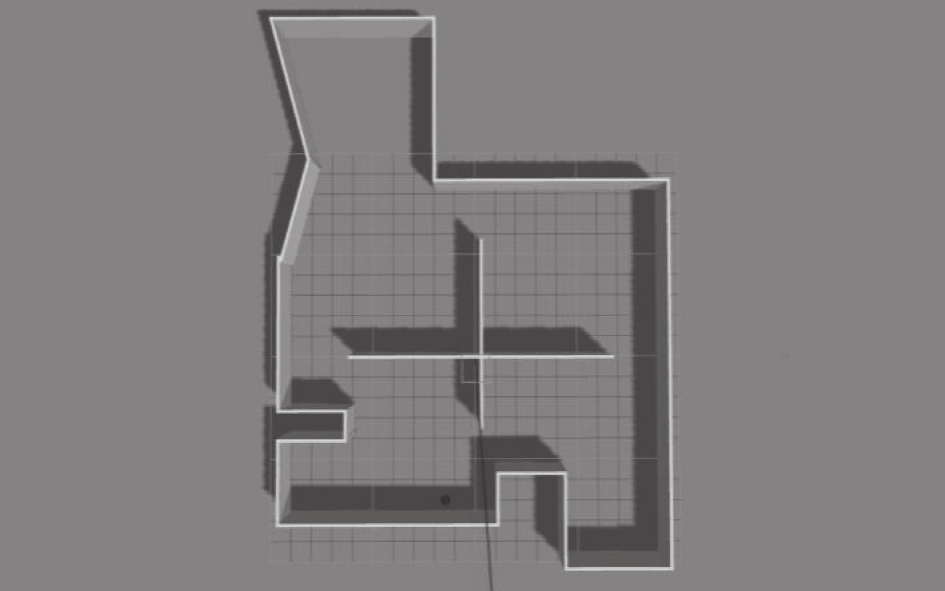
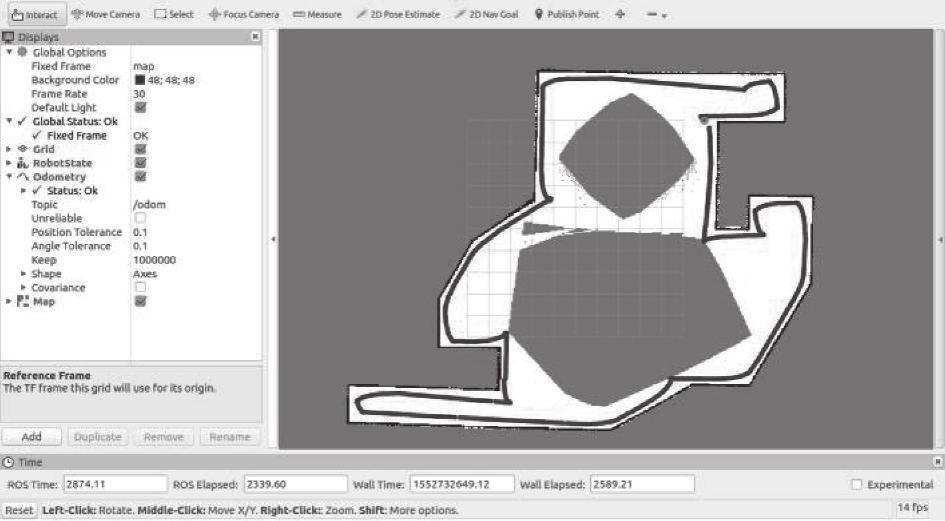
图 14 室内中央有墙体的模拟环境
Fig. 14 A simulated environment with a wall in the center of the room
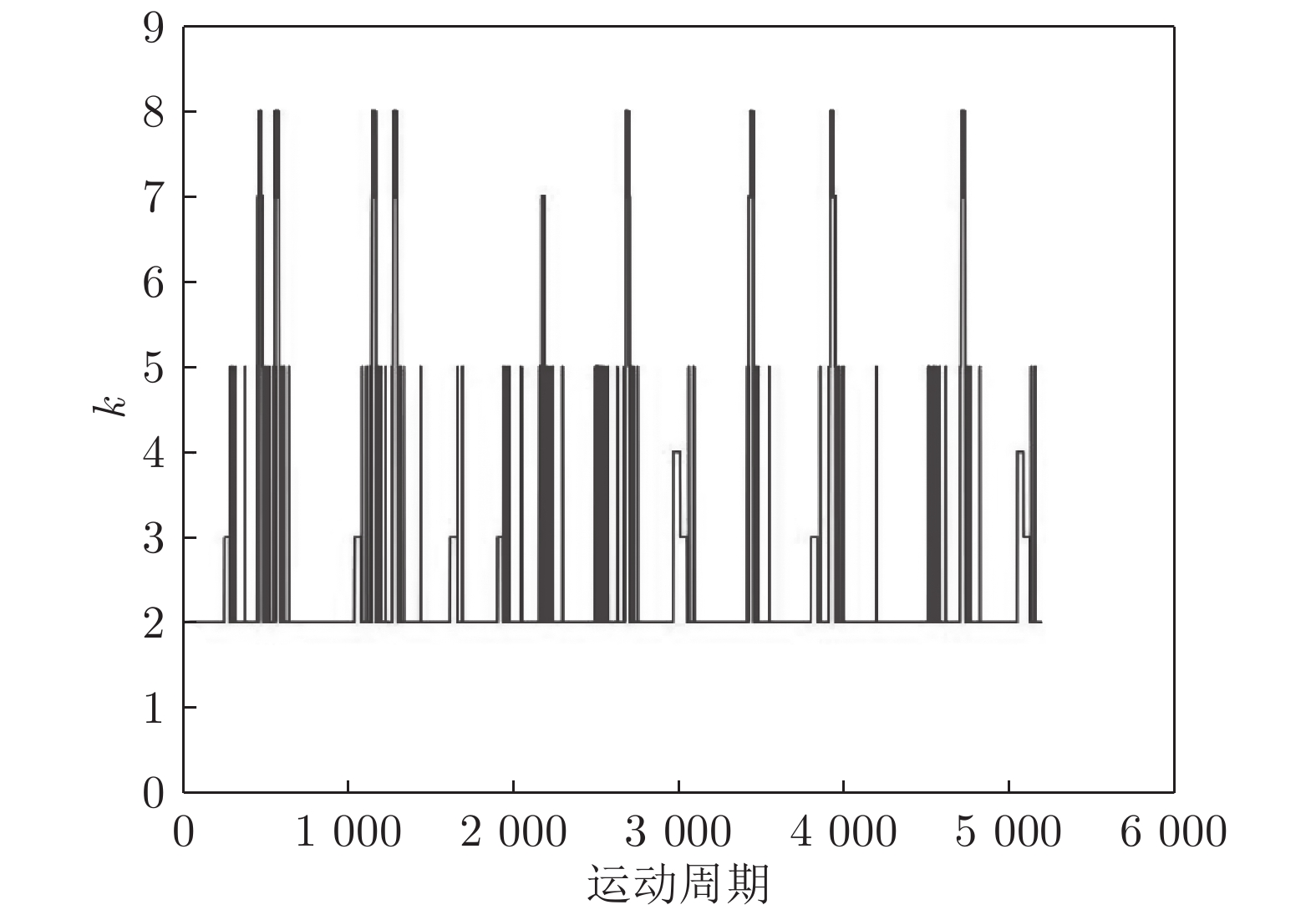
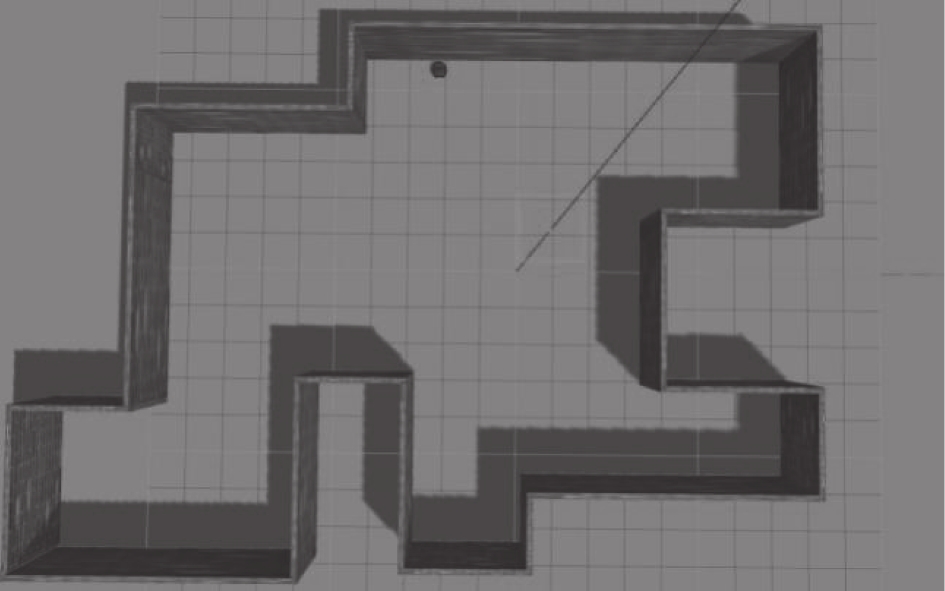
图 18 拐角较多环境下
$ k $ 值变化Fig. 18 Change in
$ k $ value in indoor simulated environment with more corners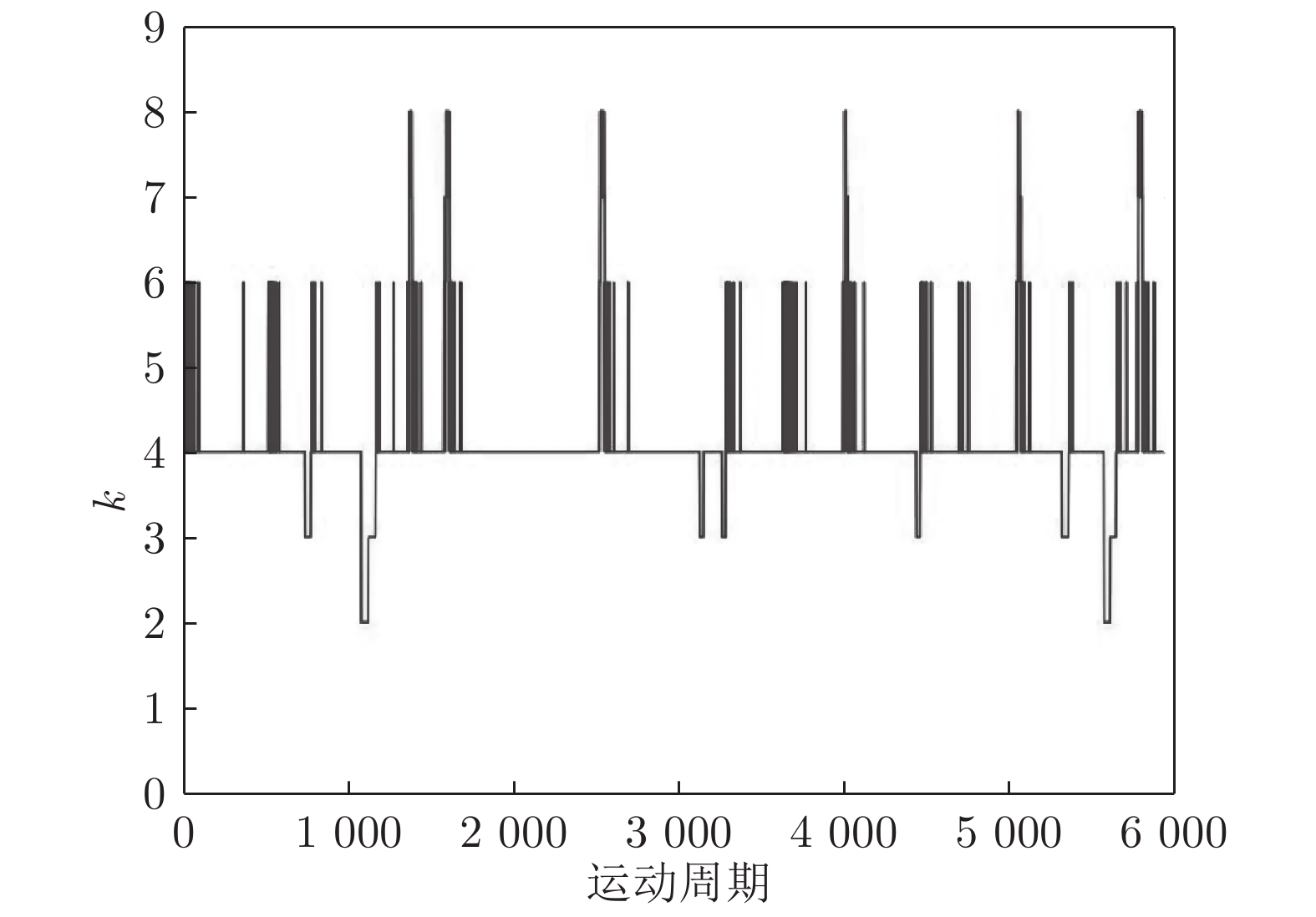
图 20 室内中央有墙体的模拟环境下
$ k $ 值变化Fig. 20 Change in
$ k $ value in a simulated environment with a wall in the center of the room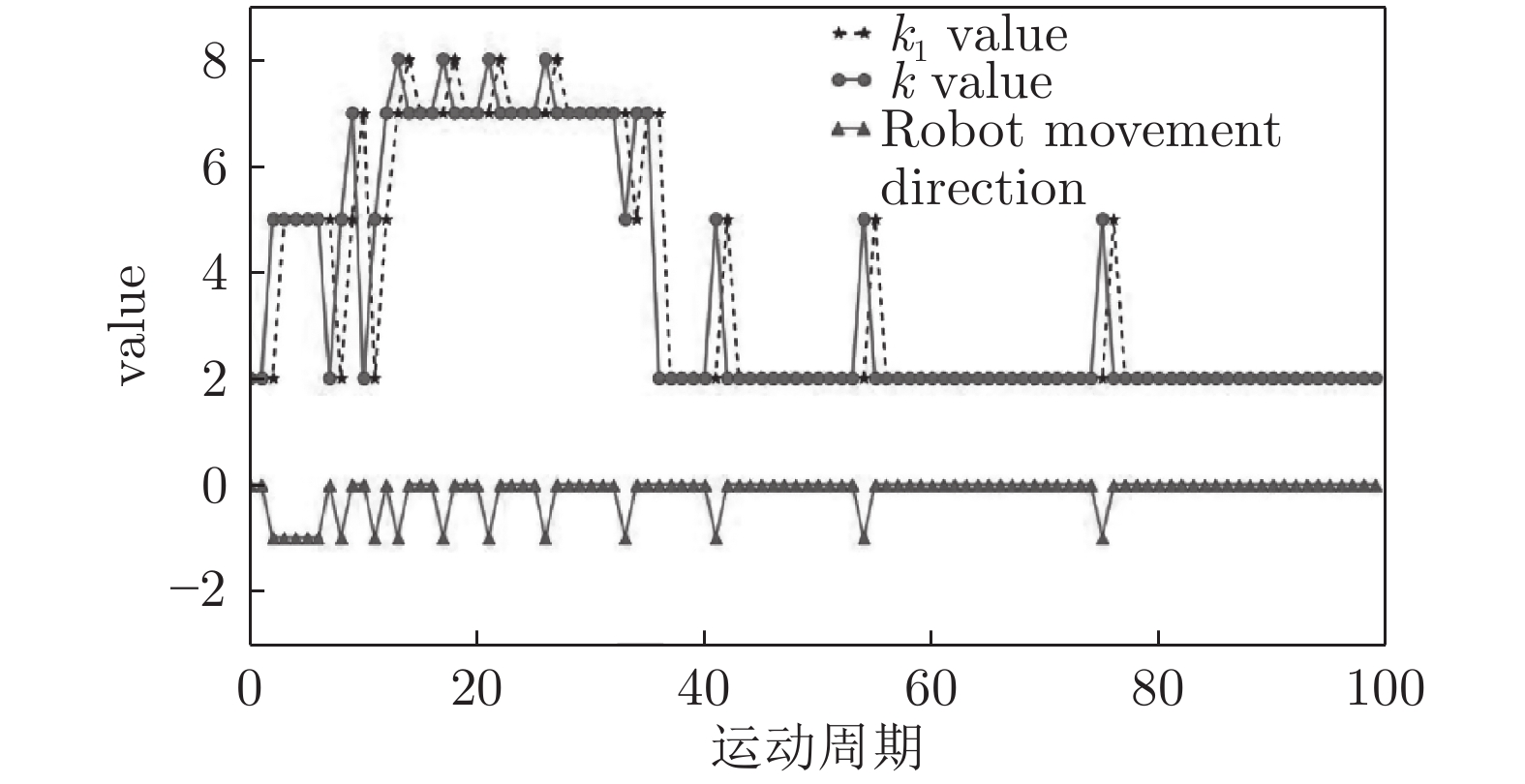
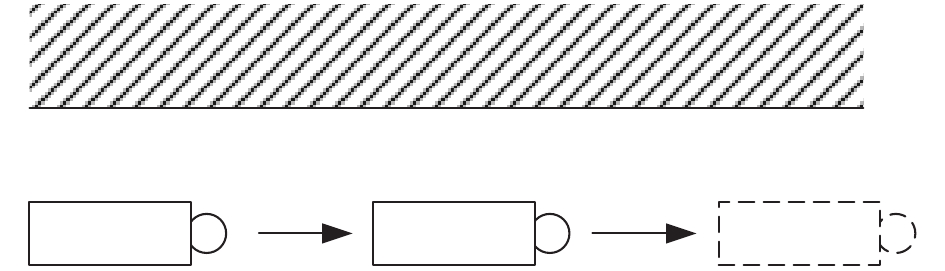
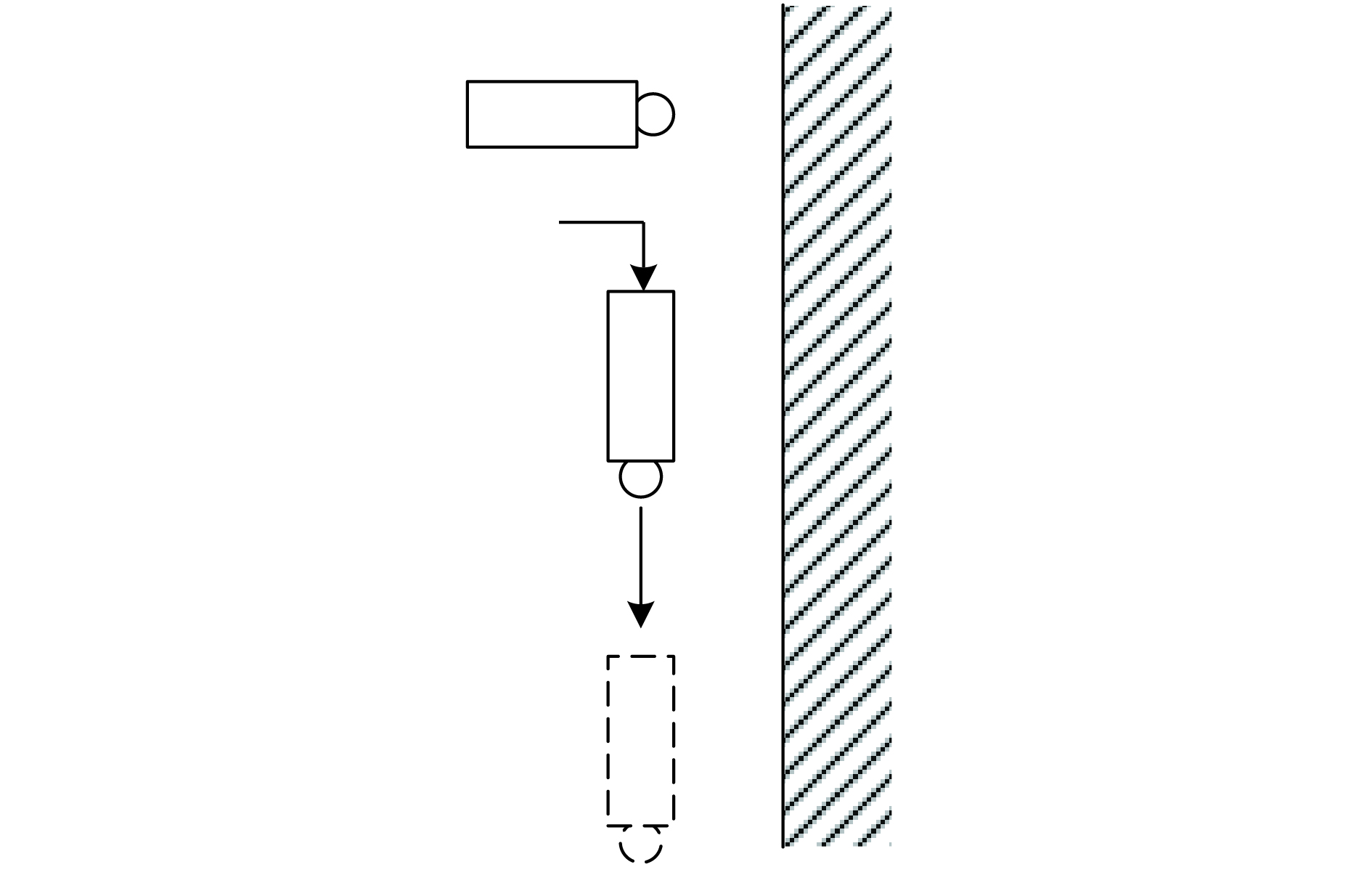
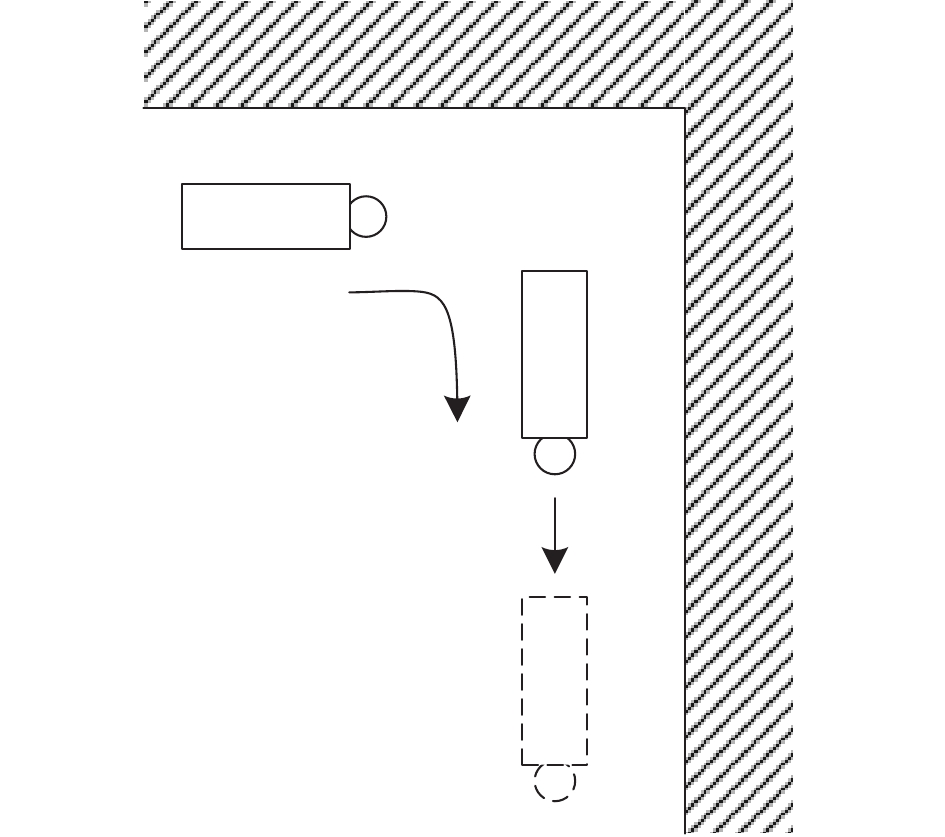
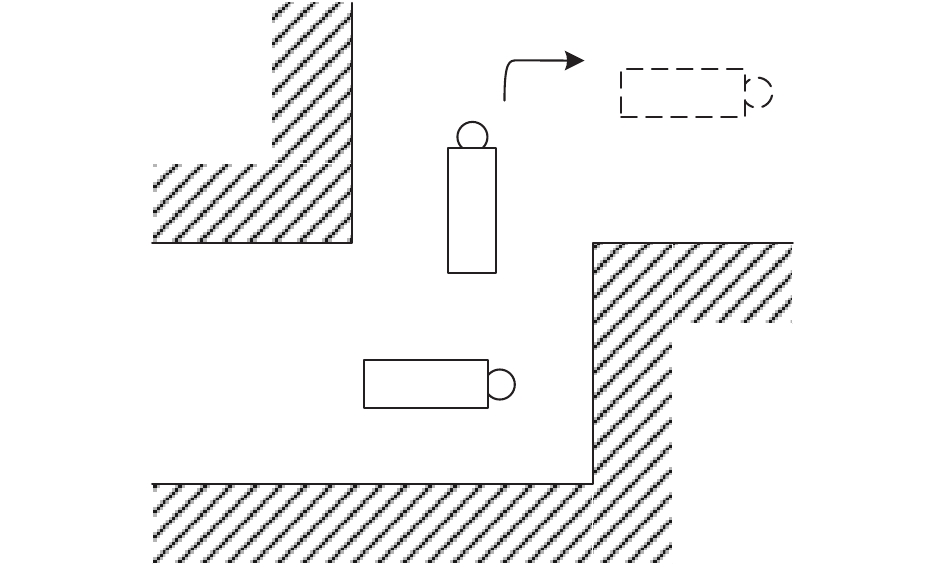
图 21 拐角较多环境下机器人运动方向判断局部图
Fig. 21 Partial diagram of the direction of motion of the robot in a corner environment
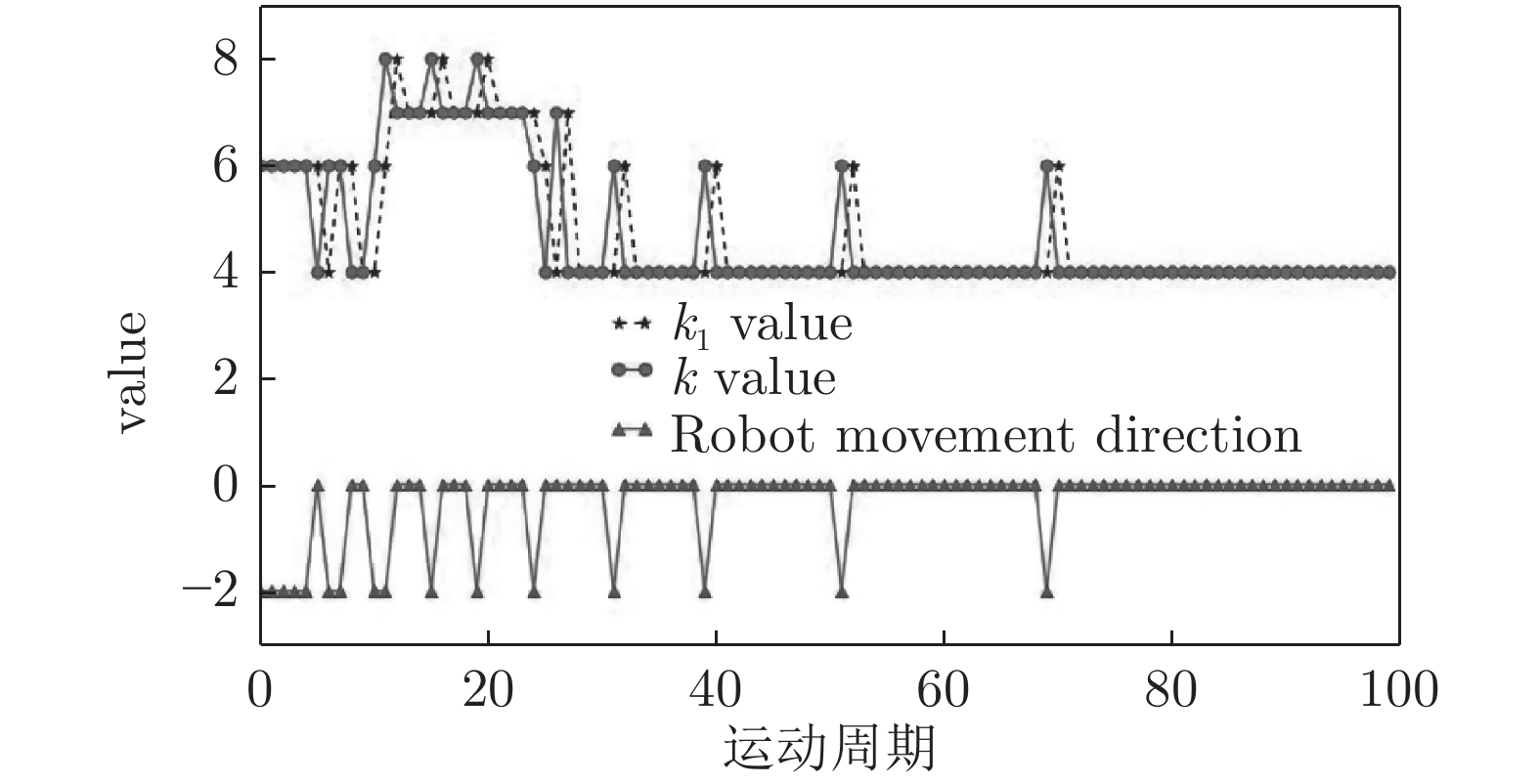
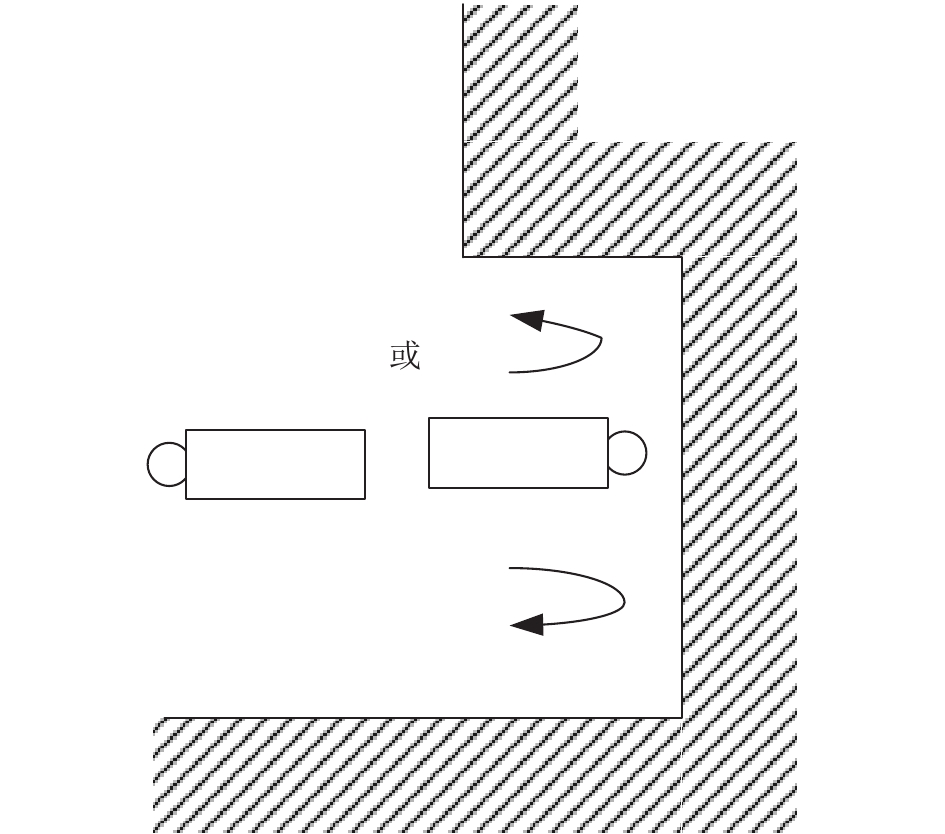
图 23 室内中央有墙体下机器人运动方向判断局部图
Fig. 23 The local figure of the movement direction of the robot under the wall in the center of the room
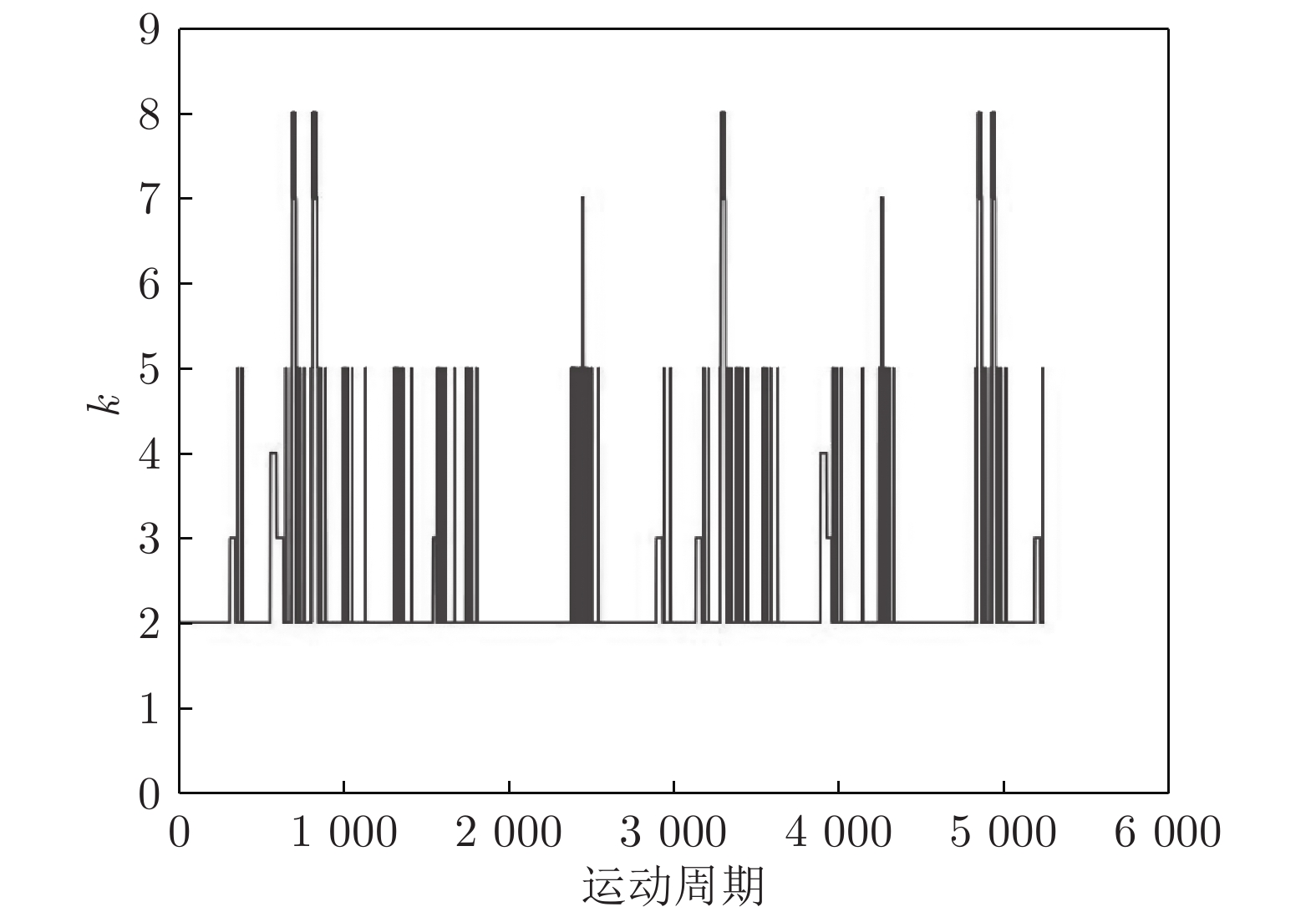
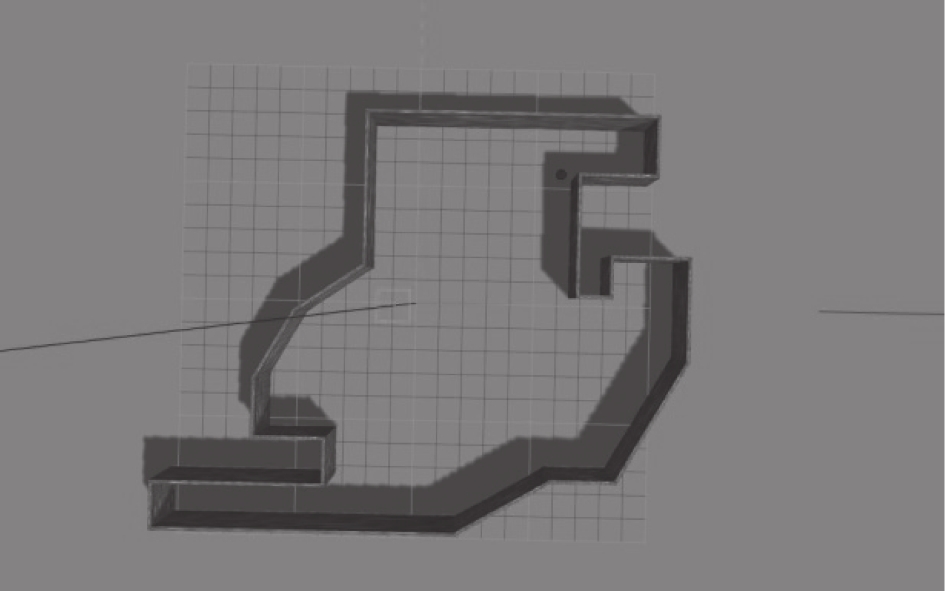
图 19 不规则墙体模拟下
$ k $ 值变化Fig. 19 Variation of
$ k $ value under irregular wall simulation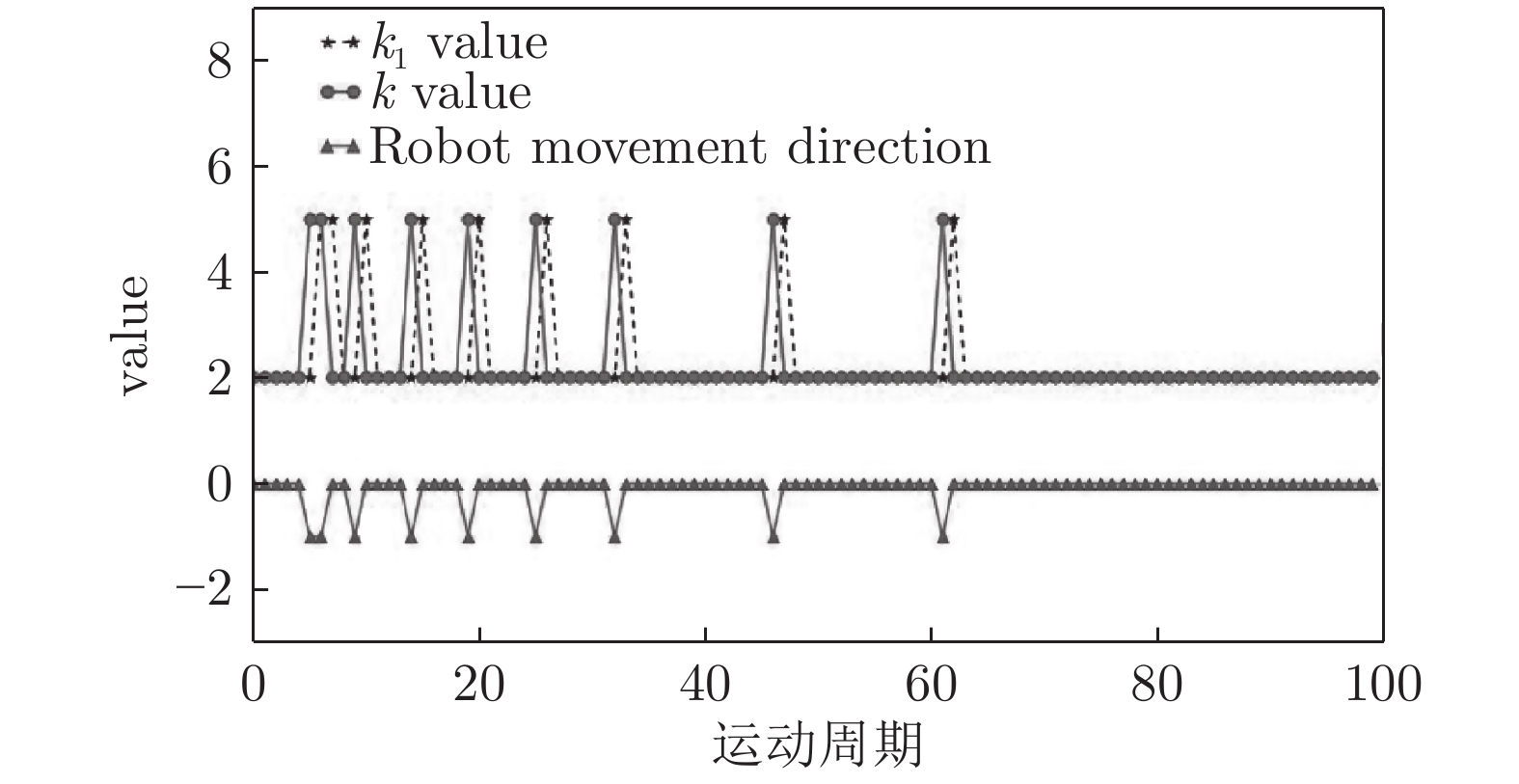
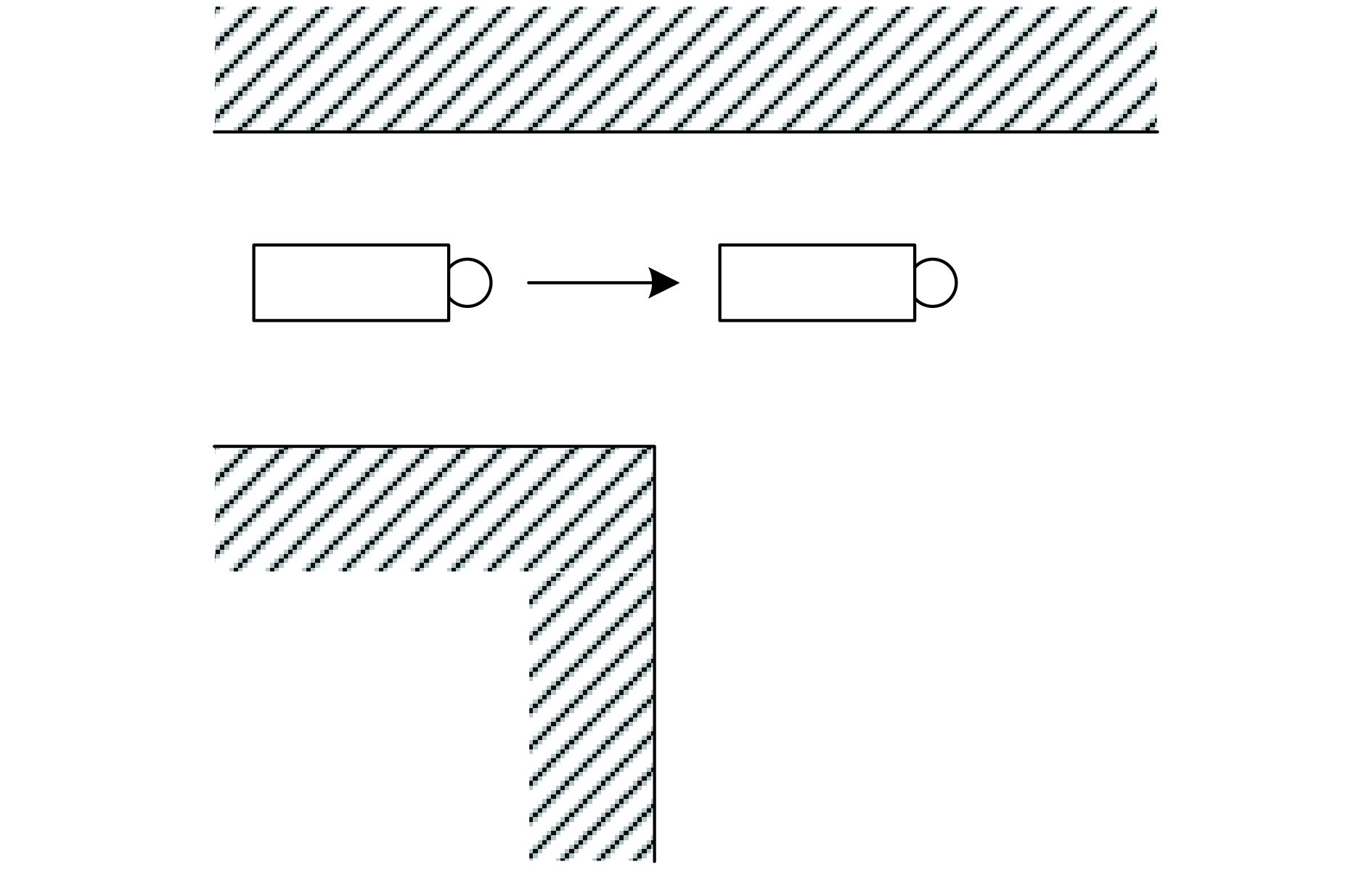
图 22 不规则墙体下机器人运动方向判断局部图
Fig. 22 Figure of the motion direction of the robot under the irregular wall
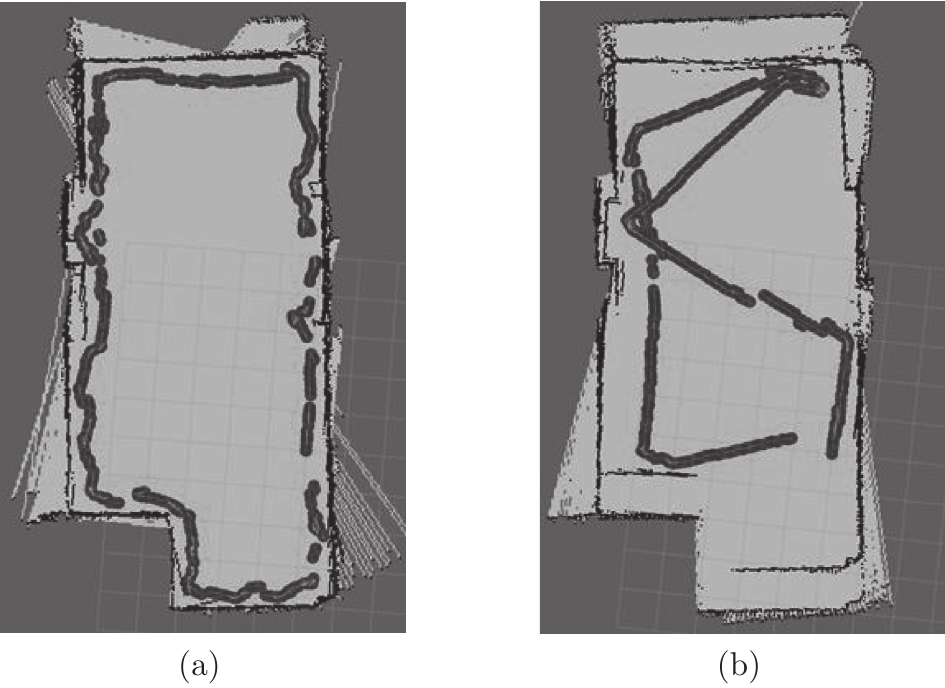
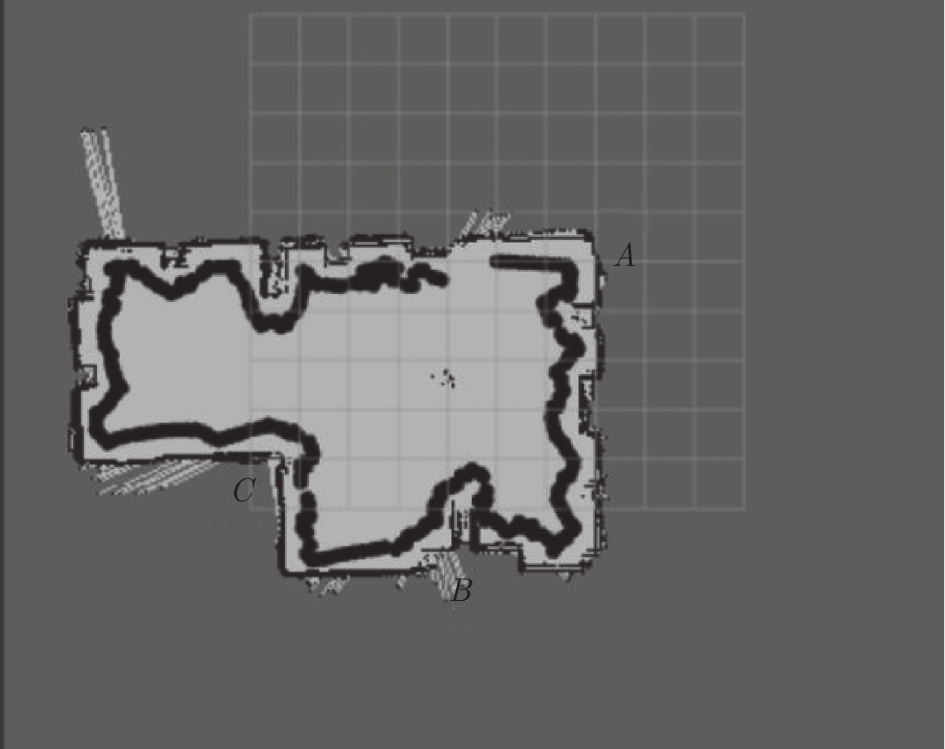
图 26 空环境下采用算法与不采用算法对比图
Fig. 26 Comparison diagram between using algorithm and not using algorithm in empty environment
表 1 移动机器人运动转向判断关系
Table 1 Mobile robot motion steering judgment relationship
$k$ $k_1$ 1 2 3 4 5 6 7 8 1 前进 左转 $f_x$ 决定右转 左转 右转 $f_x$ 决定$f_x$ 决定2 前进 前进 前进 右转 前进 右转 $f_x$ 决定$f_x$ 决定3 $f_x$ 决定左转 $f_x$ 决定右转 左转 右转 $f_x$ 决定$f_x$ 决定4 前进 左转 前进 前进 左转 前进 $f_x$ 决定$f_x$ 决定5 右转 右转 右转 右转 右转 右转 右转 右转 6 左转 左转 左转 左转 左转 左转 左转 左转 7 前进 前进 前进 前进 前进 前进 前进 前进 8 $f_x$ 决定右转 $f_x$ 决定左转 右转 左转 $f_x$ 决定$f_x$ 决定 下载: 导出CSV
下载: 导出CSV
表 2 机器人沿墙顺时针行走运动转向判断表
Table 2 Robot walking along the wall clockwise movement steering judgment table
$k$ $k_1$ 1 3 7 8 1 左转 左转 左转 2 前进 前进 3 右转 右转 左转 左转 4 左转 左转 8 右转 右转 右转 右转
下载: 导出CSV
表 3 机器人沿墙逆时针行走运动转向判断表
Table 3 Counterclockwise walking movement steering judgment table of robot along the wall
$k$ $k_1$ 1 3 7 8 1 右转 右转 右转 2 右转 右转 3 左转 左转 右转 右转 4 前进 前进 8 左转 左转 左转 左转
下载: 导出CSV
表 4 机器人状态转移表
Table 4 Robot state transfer table
$k$ $k_1$ 1 2 3 4 5 6 7 8 1 $p_{11}$ $p_{12}$ $p_{13}$ $p_{14}$ $p_{15}$ $p_{16}$ $p_{17}$ $p_{18}$ 2 $p_{21}$ $p_{22}$ $p_{23}$ $p_{24}$ $p_{25}$ $p_{26}$ $p_{27}$ $p_{28}$ 3 $p_{31}$ $p_{32}$ $p_{33}$ $p_{34}$ $p_{35}$ $p_{36}$ $p_{37}$ $p_{38}$ 4 $p_{41}$ $p_{42}$ $p_{43}$ $p_{44}$ $p_{45}$ $p_{46}$ $p_{47}$ $p_{48}$ 5 $p_{51}$ $p_{52}$ $p_{53}$ $p_{54}$ $p_{55}$ $p_{56}$ $p_{57}$ $p_{58}$ 6 $p_{61}$ $p_{62}$ $p_{63}$ $p_{64}$ $p_{65}$ $p_{66}$ $p_{67}$ $p_{68}$ 7 $p_{71}$ $p_{72}$ $p_{73}$ $p_{74}$ $p_{75}$ $p_{76}$ $p_{77}$ $p_{78}$ 8 $p_{81}$ $p_{82}$ $p_{83}$ $p_{84}$ $p_{85}$ $p_{86}$ $p_{87}$ $p_{88}$
下载: 导出CSV
-
[1] 王栋耀, 马旭东, 戴先中. 基于声纳的移动机器人沿墙导航控制. 机器人, 2004, 26(4): 346−350 doi: 10.3321/j.issn:1002-0446.2004.04.012Wang Dong-Yao, Ma Xu-Dong, Dai Xian-Zhong. Wall-following navigation control for a sonar-based mobile robot. Robot, 2004, 26(4): 346−350 doi: 10.3321/j.issn:1002-0446.2004.04.012 [2] 朱毅, 张涛, 宋靖雁. 未知环境下势场法路径规划的局部极小问题研究. 自动化学报, 2010, 36(8): 88−96Zhu Yi, Zhang Tao, Song Jing-Yan. Study on the local minima problem of path planning using potential field method in unknown environments. Acta Automatica Sinica, 2010, 36(8): 88−96 [3] Nasrinahar A, Chuah J H. Intelligent motion planning of a mobile robot with dynamic obstacle avoidance. Journal on Vehicle Routing Algorithms, 2018, 1: 89−104 [4] Van Turennout P, Honderd G, Van Schelven L J. Wall-following control of a mobile robot. In: Proceedings of the 1992 IEEE International Conference on Robotics. IEEE, 1992. 280–285 [5] Y. Ando, S. Yuta. Following a wall by an autonomous mobile robot with a sonar-ring. In: Proceedings of the 1995 IEEE International Conference on Robotics and Automation. IEEE, 1995. 2599−2606 [6] Lee C L, Lin C J, Lin H Y. Smart robot wall-following control using a sonar behavior-based fuzzy controller in unknown environments. Smart Science, 2017, 5(3): 1−7 [7] Wu G D, Zhu Z W, Chien C W. Sparse-sensing-based wall-following control design for a mobile-robot. In: Proceedings of the 2016 IEEE International Conference on Control and Robotics Engineering (ICCRE). IEEE, 2016. 1–5 [8] 周慧, 李剑汶, 江昊威, 童峰. 基于单超声传感器的移动机器人沿墙导航. 声学技术, 2014, 33(2): 243−246Zhou Hui, Li Jian-Wen, Jiang Hao-Wei, Tong Feng. Mobile robot wall-following navigation based on a single ultrasonic sensor. Technical Acoustics, 2014, 33(2): 243−246 [9] 李霞, 孙秋凤. 沿墙走算法在竞赛灭火机器人中的应用. 实验室研究与探索, 2018, 37(5): 38−41Li Xia, Sun Qiu-Feng. Application and exploration of the algorithm of walking along the wall in the fire extinguishing robot. Research and Exploration in Laboratory, 2018, 37(5): 38−41 [10] Wei X, Dong E B, Liu C S, Han G M, Yang J. A wall-following algorithm based on dynamic virtual walls for mobile robots navigation. In: Proceedings of the 2018 IEEE International Conference on Real-time Computing. IEEE, 2018. 46–51 [11] Zuo S X, Ou Y S, Zhu X R. A path planning framework for indoor low-cost mobile robots. In: Proceedings of the 2017 IEEE International Conference on Information. IEEE, 2017. 18–23 [12] Juang C F, Chen Y H, Jhan Y H. Wall-following control of a hexapod robot using a data-driven fuzzy controller learned through differential evolution. IEEE Transactions on Industrial Electronics, 2015, 62(1): 611−619 doi: 10.1109/TIE.2014.2319213 [13] Hsu C H, Juang C F. Evolutionary robot wall-following control using type-2 fuzzy controller with species-DE-activated continuous ACO. IEEE Transactions on Fuzzy Systems, 2013, 21(1): 100−112 doi: 10.1109/TFUZZ.2012.2202665 [14] 徐明亮, 柴志雷, 须文波. 移动机器人模糊Q-学习沿墙导航. 电机与控制学报, 2010, 14(6): 83−97 doi: 10.3969/j.issn.1007-449X.2010.06.015Xu Ming-Liang, Chai Zhi-Lei, Xu Wen-Bo. Wall-following control of a mobile robot with fuzzy Q-learning. Electric Machines And Control, 2010, 14(6): 83−97 doi: 10.3969/j.issn.1007-449X.2010.06.015 [15] Wardana A A, Widyotriatmo A, Turnip A. Wall following control of a mobile robot without orientation sensor. In: Proceedings of the 3rd International Conference on Instrumentation Control and Automation (ICA). IEEE, 2013. 212–215 [16] Silva Ortigoza R, Garcia Sanchez J R, Hernandez Guzman V M, Marquez Sanchez C, Marcelino Aranda M. Trajectory tracking control for a differential drive wheeled mobile robot considering the dynamics related to the actuators and power stage. IEEE Latin America Transactions, 2016, 14(2): 657−664 doi: 10.1109/TLA.2016.7437207 -





































































































































计量
- 文章访问数: 1394
- HTML全文浏览量: 190
- PDF下载量: 188
- 被引次数: 0
