

-
摘要: 研究基于T-S (Takagi-Sugeno)模糊模型的采样控制系统鲁棒耗散控制问题. 利用2阶B-L (Bessel-Legendre)不等式和整个采样间隔
$\left[ {{t_k},{t_{k + 1}}} \right)$ 的特征信息, 提出一个基于B-L不等式的双边时间相关不连续L-K (Lyapunov-Krasovskii)泛函. 使用提出的L-K泛函和改进的自由矩阵不等式, 建立了确保系统严格($\mathcal{Q}$ ,$\mathcal{S}$ ,$\mathcal{R}$ )-$\gamma$ -耗散的充分条件. 基于所得耗散条件, 给出了T-S模糊采样控制器的设计方法, 并用于处理卡车拖车的控制问题. 仿真结果表明所提出的控制器设计方法非常有效.-
关键词:
- T-S模糊模型 /
- 采样控制系统 /
- 基于B-L不等式的双边时间相关不连续L-K泛函 /
- T-S模糊采样控制器
Abstract: This paper investigates the problem of robust dissipative control for sampled-data control system based on Takagi-Sugeno (T-S) fuzzy model. By employing the second-order Bessel-Legendre (B-L) inequality and the characteristic information on the whole sampling interval$\left[ {{t_k},{t_{k + 1}}} \right)$ , a B-L-inequality-based two-side time-dependent discontinuous Lyapunov-Krasovskii (L-K) functional is proposed. By using the proposed functional and improved free-matrix-based inequality, a sufficient condition is established to ensure that the sampled-data system is strictly ($\mathcal{Q}$ ,$\mathcal{S}$ ,$\mathcal{R}$ )-$\gamma$ -dissipative. Based on the obtained condition, a method to design desired T-S fuzzy sampled-data controller is presented, which is applied to deal with the control problem of a truck-trailer system. The obtained results show that the proposed design approach for the controller is very effective. -

图 2 变周期采样
$h_k \in (0,0.26]$ 的系统状态响应Fig. 2 State response of system in the case of variable sampling with
$h_k \in (0,0.26]$ 
图 3 变周期采样
$h_k \in (0,0.26]$ 的系统控制输入Fig. 3 Control input of system (38) in the case of variable sampling with
$h_k \in (0,0.26]$ 
图 4 定周期采样
$h_2 = 0.32$ 的系统状态响应Fig. 4 State response of system in the case of constant sampling with
$h_2 = 0.32$ 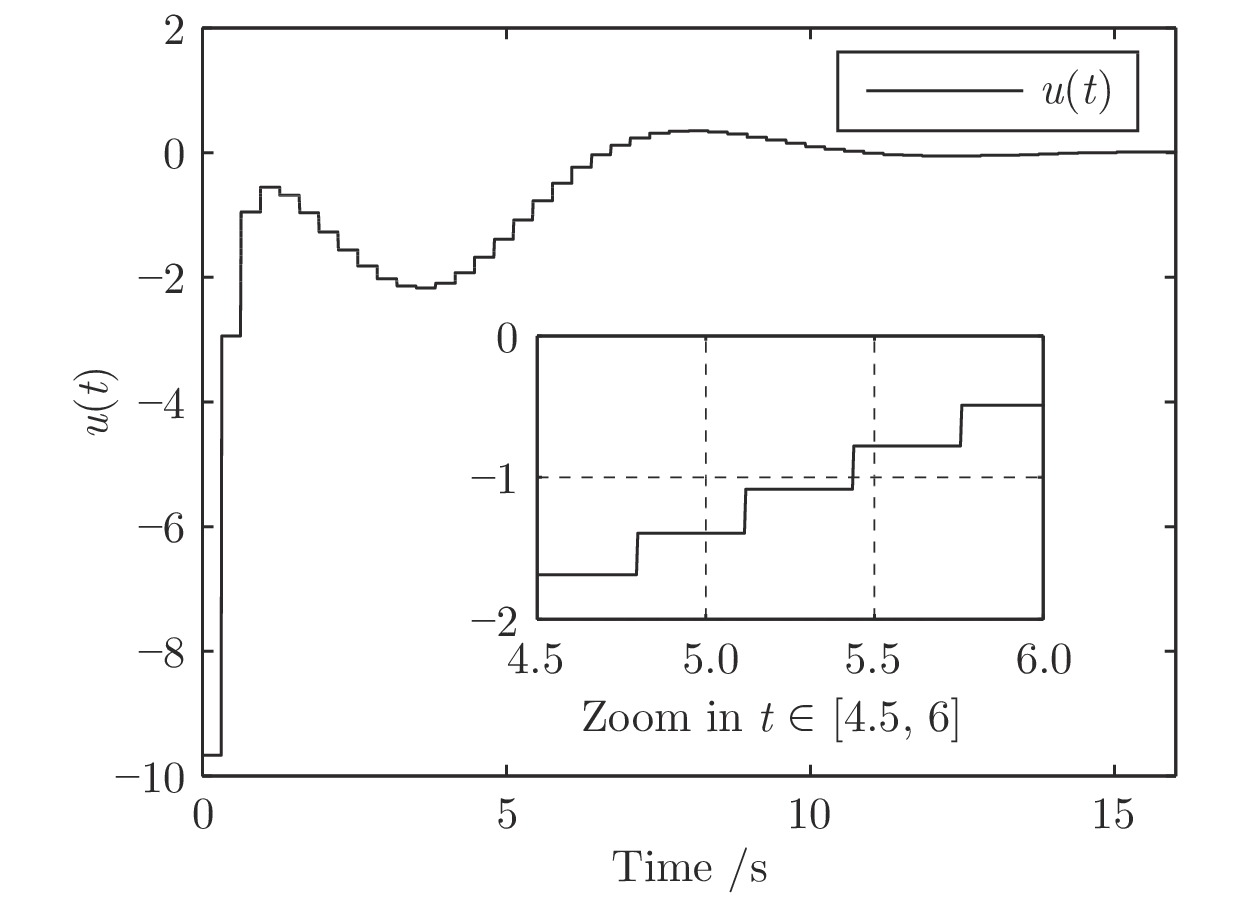
图 5 定周期采样
$h_2 = 0.32$ 的系统控制输入Fig. 5 Control input of system in the case of constant sampling with
$h_2 = 0.32$ 表 1 对不同
$ h_2 $ 的$\gamma_{\max}$ Table 1
$\gamma_{\max}$ for different$ h_2 $ $h_2$ 0.05 0.10 0.15 0.20 0.25 0.35 文献 [30] 0.9971 0.9671 0.9311 0.8842 0.8193 − 推论 1 1.0636 1.0463 1.0264 0.9978 0.9554 0.7484 定理 2 1.0643 1.0472 1.0272 0.9994 0.9559 0.7564  下载: 导出CSV
下载: 导出CSV
表 2 对不同
$ h_1 $ 的$\gamma_{\max}$ Table 2
$\gamma_{\max}$ for different$ h_1 $ $h_1$ 0.10 0.15 0.20 0.25 0.3 0.35 定理 2 0.8108 0.8350 0.8546 0.8716 0.8854 0.9026
下载: 导出CSV
表 3 对不同
$ h_1 = h_2 $ 的$\gamma_{\max}$ Table 3
$\gamma_{\max}$ for different$ h_1 = h_2 $ $h_1=h_2$ 0.05 0.10 0.15 0.20 0.25 0.35 定理 2 1.0679 1.0572 1.0447 1.0283 1.0072 0.9026
下载: 导出CSV
-
[1] Takagi T, Sugeno M. Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics, 1985, 15(1): 116−132 [2] Garcia-Nunes P I, Souza R M, Sliva A E. Mental models analysis and comparison based on fuzzy rules: A case study of the protests of June and July 2013 in Brazil. IEEE Transactions on Systems, Man, and Cybernetics, 2017, 47(8): 2021−2033 doi: 10.1109/TSMC.2016.2598767 [3] Li H, Jing X, Lam H K, Shi P. Fuzzy sampled-data control for uncertain vehicle suspension systems. IEEE Transactions on Cybernetics, 2014, 44(7): 1111−1126 doi: 10.1109/TCYB.2013.2279534 [4] Wu Z G, Dong S, Su H, Huang T. Fuzzy-model-based nonfragile guaranteed cost control of nonlinear markov jump systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(8): 2388−2397 doi: 10.1109/TSMC.2017.2675943 [5] 肖会芹, 何勇, 吴敏, 肖伸平. 基于T-S模糊模型的采样数据网络控制系统H∞输出跟踪控制. 自动化学报, 2015, 41(3): 661−668Xiao Hui-Qin, He Yong, Wu Min, Xiao Shen-Ping. H∞ output tracking for sampled-data networked control systems in T-S Fuzzy model. Acta Automatica Sinica, 2015, 41(3): 661−668 [6] Xiao H Q, He Y, Wu M, Xiao S P. New results on H∞ tracking control based on the T-S fuzzy model for sampleddata networked control system. IEEE Transactions on Fuzzy Systems, 2015, 23(6): 2439−2448 doi: 10.1109/TFUZZ.2015.2410790 [7] Zhang D, Cai W, Xie L, Wang Q G. Nonfragile distributed filtering for T-S fuzzy systems in sensor networks. IEEE Transactions on Fuzzy Systems, 2015, 23(5): 1883−1890 doi: 10.1109/TFUZZ.2014.2367101 [8] Su X, Shi P, Wu L, Basin M V. Reliable filtering with strict dissipativity for T-s fuzzy time-delay systems. IEEE Transactions on Cybernetics, 2014, 44(12): 2470−2483 doi: 10.1109/TCYB.2014.2308983 [9] Li H, Gao Y, Wu L, Lam H K. Fault detection for T-S fuzzy time-delay systems: delta operator and input-output methods. IEEE Transactions on Cybernetics, 2015, 45(2): 229−241 doi: 10.1109/TCYB.2014.2323994 [10] Fujioka H. A Discrete-time approach to stability analysis of systems with aperiodic sample-and-hold devices. IEEE Transactions on Automatica Control, 2009, 54(10): 2440−2445 doi: 10.1109/TAC.2009.2029304 [11] Jiang X, Yin Z, Wu J. Stability analysis of linear systems under time-varying samplings by a non-standard discretization method. Eelectonics, 2018, 7(11): 1−11 [12] Briatab C, Seuret A. A looped-functional approach for robust stability analysis of linear impulsive systems. Systems & Control Letters, 2012, 61(10): 980−998 [13] Fridman E, Seuret A, Richard J P. Robust sampled-data stabilization of linear systems: an input delay approach. Automatica, 2004, 40(8): 378−385 [14] Seuret A, Couaisbaut F. Wirtinger-based integral inequality: application to time-delay systems. Automatica, 2013, 49: 2860−2866 doi: 10.1016/j.automatica.2013.05.030 [15] Seuret A, Briat C. Stability analysis of uncertain sampleddata systems with incremental delay using loopedfunctionals. Automatica, 2015, 55: 274−278 doi: 10.1016/j.automatica.2015.03.015 [16] Lian H H, Xiao S P, Wang Z, Zhang X F, Xiao H Q. Further results on sampled-data synchronization control for chaotic neural networks with actuator saturation. Nerocomputing, 2019, 346: 30−37 doi: 10.1016/j.neucom.2018.08.090 [17] Lee T H, Ju H P. Stability analysis of sampled-data systems via free-matrix-based time-dependent discontinuous Lyapunov approach . IEEE Transactions on Automatic Control, 2017, 48(1): 3653−3657 [18] Zeng H B, Teo K. L, He Y. A new looped-functional for stability analysis of sampled-data systems. Automatica, 2017, 82: 328−331 doi: 10.1016/j.automatica.2017.04.051 [19] Lee S M, Kwon O M, Lee S H. Improved stability criteria for sampled-data systems using modified free weighting matrix. Journal of the Franklin Institute, 2019, 356: 2198−2211 doi: 10.1016/j.jfranklin.2018.12.016 [20] Zeng H B, Teo K L, He Y, Wang W. Sampled-data stabilization of chaotic systems based on a T-S fuzzy model. Information Sciences, 2019, 483: 262−272 doi: 10.1016/j.ins.2019.01.046 [21] Zhang R, Zeng D, Park J H, Liu Y, Zhong S. A new approach to stabilization of chaotic systems with nonfragile fuzzy proportional retarded sampled-data control. IEEE Transactions on Cyberneticss, 2019, 49(9): 3218−3229 doi: 10.1109/TCYB.2018.2831782 [22] Lee T H, Park J H. New methods of fuzzy sampled-data control for stabilization of chaotic systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(12): 2026−2034 doi: 10.1109/TSMC.2017.2690803 [23] Xiao S P, Lian H H, Teo K L, Zeng H B, ZHANG X H. A new Lyapunov functional approach to sampled-data synchronization control for delayed neural networks. Journal of the Franklin Institute, 2018, 355: 8857−8873 doi: 10.1016/j.jfranklin.2018.09.022 [24] B. Zhang, W. X. Zheng, S. Xu. Filtering of Markovian jump delay systems based on a new performance index. IEEE Transactions on Circuits and Systems I: Regular Paper, 2013, 60(3): 1250−1263 [25] Shi P, Su X, Li F. Dissipativity-based filtering for fuzzy switched systems with stochastic perturbation. IEEE Transactions on Automatic Control, 2016, 61(6): 694−1699 [26] 肖伸平, 练红海, 陈刚, 冯磊. 时变时滞神经网络的时滞相关鲁棒稳定性和耗散性分析. 控制与决策, 2017, 32(6): 1084−1090Xiao Shen-Ping, Lian Hong-Hai, Chen Gang, Feng Lei. Delay-dependent robust stability and dissipativity analysis of neural networks with time-varying delays. Control and Decision, 2017, 32(6): 1084−1090 [27] Ma Y, Jia X, Liu D. Finite-time dissipative control for singular discrete-time Markovian jump systems with actuator saturation and partly unknown transition rates. Applied Mathematical Modelling, 2018, 53: 49−70 doi: 10.1016/j.apm.2017.07.035 [28] Tao J, Lu R, Shi P, Su H, Wu Z G. Dissipativity-based reliable control for fuzzy Markov jump systems with actuator faults. IEEE Transactions on Cybernetics, 2017, 47(9): 2377−2388 doi: 10.1109/TCYB.2016.2584087 [29] Wang S, Ji W, Pang J, Jian Y. Dissipativity-based sampleddata reliable control design for T-S fuzzy system using limited Bessel-Legendre inequaliity. IEEE Access, 2018, 6: 73405−73415 doi: 10.1109/ACCESS.2018.2882125 [30] Wu Z G, Shi P, Su H, Lu R. Dissipativity-based sampleddata fuzzy control design and its application to truck-trailer system. IEEE Transactions on Fuzzy Systems, 2015, 23(5): 1669−1679 doi: 10.1109/TFUZZ.2014.2374192 [31] Zeng H B, Teo K L, He Y, Wang W. Sampled-data-Based dissipative control of T-S fuzzy systems. Applied Mathematical Modelling, 2019, 65: 415−427 doi: 10.1016/j.apm.2018.08.012 [32] Hill D, Moylan P. The stability of nonlinear dissipative system. IEEE Transactions on Automatic Control, 1976, 21: 708−711 doi: 10.1109/TAC.1976.1101352 [33] Zhang X M, Han Q L, Zeng Z G. Hierarchical type stability criteria for delayed neural networks via canonical sessellegendre inequalities. IEEE Transactions on Cybernetics, 2018, 48(5): 1660−1671 doi: 10.1109/TCYB.2017.2776283 [34] Seuret A, Gouaisbaut F. Stability of linear systems with time-varying delays using Bessel-Legendre inequalities. IEEE Transactions on Automatic Control, 2018, 63(1): 225−232 doi: 10.1109/TAC.2017.2730485 [35] Zeng H B, He Y, Wu M. New results on stability analysis for systems with discrete distributed delay. Automatica, 2015, 60: 189−192 doi: 10.1016/j.automatica.2015.07.017 [36] Lian Z, He Y, Zhang C K, Wu M. Stability and stabilization of T-S fuzzy systems with time-varying delays via delay-product-type functional method. IEEE Transactions on Cybernetics, 2020, 50(6): 2580−2589 [37] 唐晓铭, 邓梨, 虞继敏, 屈洪春. 基于区间二型T-S模糊模型的网络控制系统的输出反馈预测控制. 自动化学报, 2019, 45(3): 604−616Tang Xiao-Ming, Deng Li, Yu Ji-Min, Qu Hong-Chun. Output feedback model predictive control for interval Type-2 T-S Fuzzy Networked Control Systems. Acta Automatica Sinica, 2019, 45(3): 604−616 [38] 张必山, 马忠军, 杨美香. 既含有一般多个随机延迟以及多个测量丢失和随机控制丢失的鲁棒H∞模糊输出反馈控制. 自动化学报, 2017, 43(9): 1656−1664Zhang Bi-Shan, Ma Zhong-Jun, Yang Mei-Xiang. Robust H∞ fuzzy output-feedback control with both general multiple probabilistic delays and multiple missing measurements and random missing control. Acta Automatica Sinica, 2017, 43(9): 1656−1664 -











 下载:
下载:





















计量
- 文章访问数: 1198
- HTML全文浏览量: 270
- PDF下载量: 255
- 被引次数: 0
