

Summary of Research on Electronic Differential Control Technology of Electric Vehicle
-
摘要:
首先, 阐述电动汽车(Electric vehicle, EV)驱动系统的布置结构以及差速控制的原理和优缺点, 并介绍用于电子差速控制(Electronic differential control, EDC)的Acekermann转向模型和3自由度整车动力学模型, 进而剖析非线性扰动和整车模型的设计理念; 其次, 重点综述电动汽车分布式驱动结构的电子差速控制策略、多机抗扰控制及优化算法的相关研究成果, 并从成果走向、局限性及可能的发展空间分析其发展态势; 最后, 从整车模型、控制策略、抗扰算法和效果验证等四个方面, 总结电动汽车电子差速控制技术的现状, 并展望未来发展可能.
Abstract:Firstly, the arrangement structure of electric vehicle (EV) driving system and the principle, advantages and disadvantages of differential control are expounded. It also introduces the Ackermann steering model and the 3-DOF (degree of freedom) dynamic model used for electronic differential control (EDC) of EV. Based on the two models above mentioned, the nonlinear perturbation of vehicle dynamic system is explained deeply, and the concept of vehicle design is explored; Secondly, the research focuses on achievements reviewing on EDC strategies, multi-motor disturbance rejection control methods and optimization algorithm for EVs whose drive systems are of the distributed framework. Then, by scanning related researches, the EDC development state is summarized and EDC development trend is forecasted from points of the results tendency, application limitations and the possible development opportunities. Finally, it summarizes the status and forecasts the prospect of EV' s EDC technology from four aspects including vehicle model, control strategy, disturbance rejection method and verification mode for EDC effect.
-
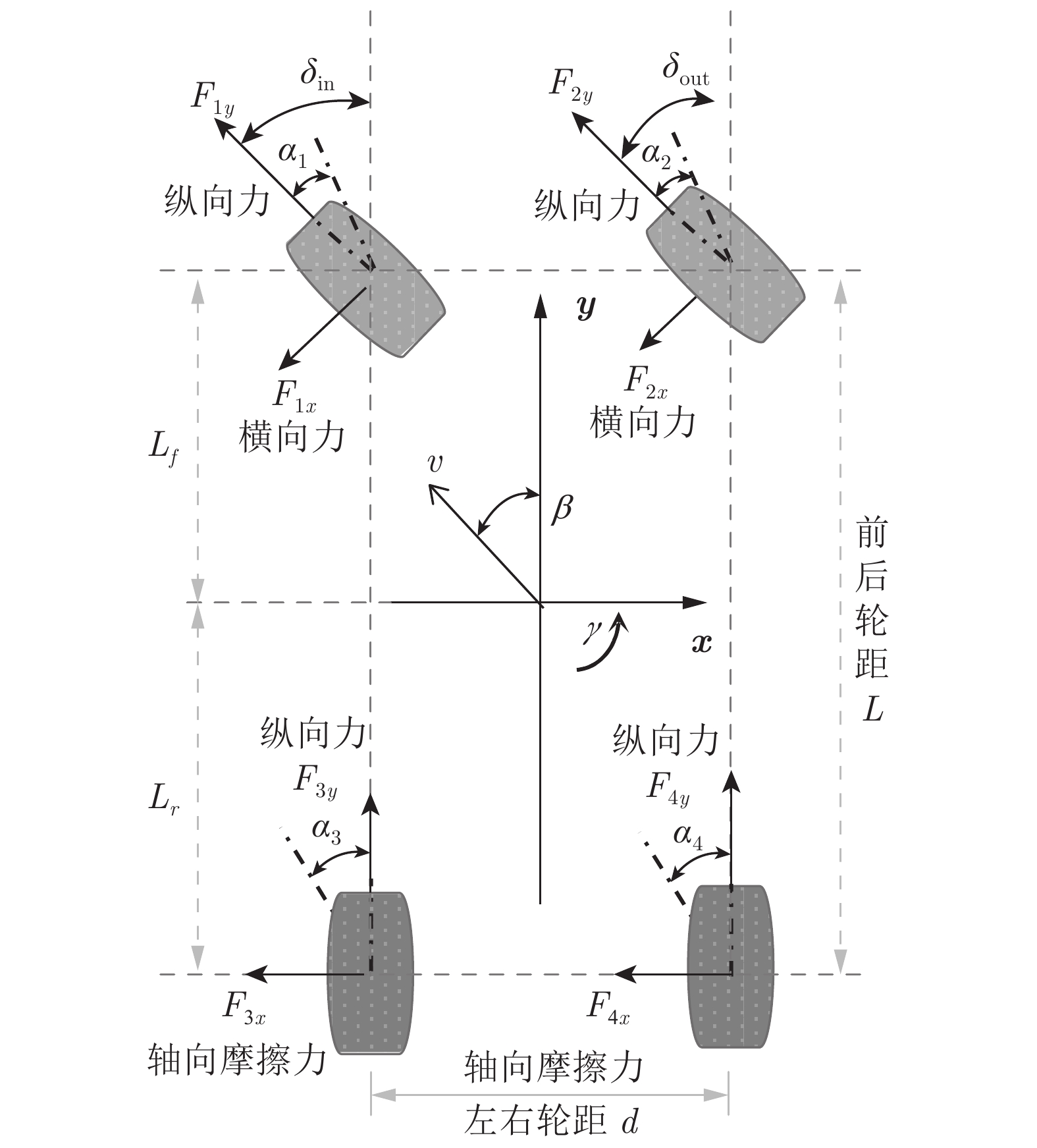
图 4 汽车转向时整车受力示意图
Fig. 4 Schematic diagram of force acting on the whole vehicle during steering

图 5 基于转速的电子差速控制策略原理
Fig. 5 Principle of electronic differential control strategy based on speed

图 6 基于转矩的电子差速控制策略原理
Fig. 6 Principle of electronic differential control strategy based on torque

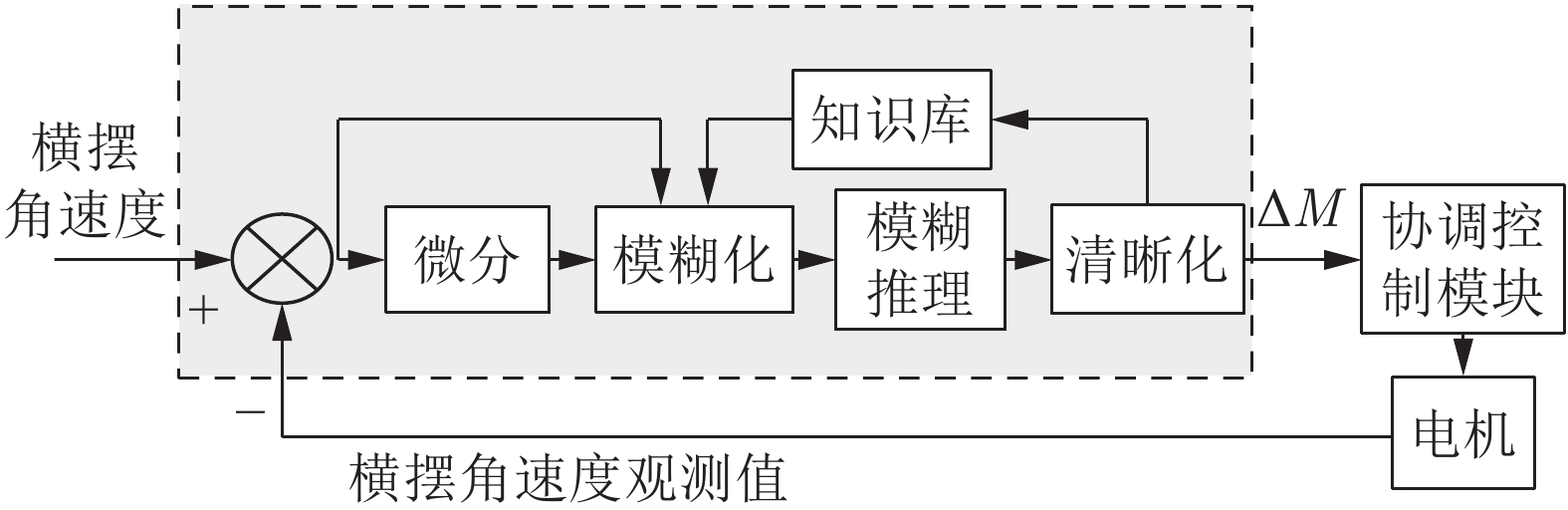
图 10 多机神经网络抗扰控制原理
Fig. 10 Principle of disturbance rejection control based on multi-machine neural network
-
[1] 靳立强, 田端洋, 刘阅. 电动轮汽车驱动助力转向与稳定性协调控制. 机械工程学报, 2018, 54(16): 160-169 doi: 10.3901/JME.2018.16.160Jin Li-Qiang, Tian Duan-Yang, Liu Yue. Coordinated control of DDAS and ESC systems for electric vehicle driven by in-wheel motors. Journal of Mechanical Engineering, 2018, 54(16): 160-169 doi: 10.3901/JME.2018.16.160 [2] You S, Lee H, Lee D, Mok H, Lee Y, Han S. Speed ratio control for electronic differentials. Electronics Letters, 2011, 47(16): 933-934. doi: 10.1049/el.2011.1546 [3] 杨欣欣, 何克忠, 郭木河, 张钹. 基于神经网络的室外移动机器人前轮转向模型. 自动化学报, 2000, 26(2): 154-161Yang Xin-Xin, He Ke-Zhong, Guo Mu-He, Zhang Bo. Front wheel steering model of outdoor mobile robot based on neural networks. Acta Automatica Sinica, 2000, 26(2): 154-161 [4] 靳彪, 张欣, 杨庆保. 纯电动汽车低速转向差速控制模型. 北京交通大学学报, 2013, 37(4): 158-161 doi: 10.3969/j.issn.1673-0291.2013.04.031Jin Biao, Zhang Xin, Yang Qing-Bao. Low speed steering differential control model for pure electric vehicle. Journal of Beijing Jiaotong University, 2013, 37(4): 158-161 doi: 10.3969/j.issn.1673-0291.2013.04.031 [5] 徐寅, 陈东. 电动汽车差速系统研究综述. 中国机械工程, 2011, 22(4): 498-503Xu Yin, Chen Dong. Summary on research of differential for a electric vehicle. China Mechanical Engineering, 2011, 22(4): 498-503 [6] 胡云峰, 曲婷, 刘俊, 施竹清, 朱冰, 曹东璞, 等. 智能汽车人机协同控制的研究现状与展望. 自动化学报, 2019, 45(7): 1261-1280Hu Yun-Feng, Qu Ting, Liu Jun, Shi Zhu-Qing, Zhu Bing, Cao Dong-Pu, et al. Human-machine cooperative control of intelligent vehicle: Recent developments and future perspectives. Acta Automatica Sinica, 2019, 45(7): 1261-1280 [7] 陈虹, 宫洵, 胡云峰, 刘奇芳, 高炳钊, 郭洪艳. 汽车控制的研究现状与展望. 自动化学报, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6Chen Hong, Gong Xun, Hu Yun-Feng, Liu Qi-Fang, Gao Bing-Zhao, Guo Hong-Yan. Automotive control: The state of the art and perspective. Acta Automatica Sinica, 2013, 39(4): 322-346 doi: 10.1016/S1874-1029(13)60033-6 [8] Chen Y, Chen S Z, Zhao Y Z, Gao Z P, Li C L. Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle. IEEE Access, 2019, 7: 17017-17032 doi: 10.1109/ACCESS.2019.2893894 [9] 余卓平, 刘军, 熊璐, 冯源. 分布式驱动电动汽车操纵性改善控制策略设计. 同济大学学报(自然科学版), 2014, 42(7): 1088-1095Yu Zhuo-Ping, Liu Jun, Xiong Lu, Feng Yuan. Control strategies of handling improvement of distributed drive electric vehicle. Journal of Tongji University (Natural Science), 2014, 42(7): 1088-1095 [10] Daya J L F, Sanjeevikumar P, Blaabjerg F, Wheeler P W, Ojo J O. Implementation of wavelet-based robust differential control for electric vehicle application. IEEE Transactions on Power Electronics, 2015, 30(12): 6510-6513 doi: 10.1109/TPEL.2015.2440297 [11] 张雷. 分布式驱动电动汽车制动系统关键技术研究[博士学位论文], 清华大学, 中国, 2015.Zhang Lei. Research on the Key Technologies of Braking System of Distributed Driven Electric Vehicle [Ph.D. dissertation], Tsinghua University, China, 2015. [12] Nahidi A, Kasaiezadeh A, Khosravani S, Khajepour A, Chen S K, Litkouhi B. Modular integrated longitudinal and lateral vehicle stability control for electric vehicles. Mechatronics, 2017, 44: 60-70 doi: 10.1016/j.mechatronics.2017.04.001 [13] Tahami F, Kazemi R, Farhanghi S. A novel driver assist stability system for all-wheel-drive electric vehicles. IEEE Transactions on Vehicular Technology, 2003, 52(3): 683-692. doi: 10.1109/TVT.2003.811087 [14] 科技部. “十三五”力推新能源汽车技术创新. 工具技术, 2016, 50(9): 104 (查阅所有网上资料,未找到本条文献信息,请联系作者确认)Ministry of science and technology. Push forward new energy vehicle technology innovation in the 13th five-year plan. Tool Technology, 2016, 50(9): 104 [15] IEA. Global EV outlook 2018 [Online], available: https://webstore.iea.org/global-ev-outlook-2018, August 9, 2019 [16] IEA. Global EV outlook 2019 [Online], available: https://webstore.iea.org/global-ev-outlook-2019, August 9, 2019 [17] 陈国栋, 王志胜. 基于阿克曼定理的四轮独立转向模糊控制算法研究. 机械与电子, 2014(8): 26-29 doi: 10.3969/j.issn.1001-2257.2014.08.007Chen Guo-Dong, Wang Zhi-Sheng. Fuzzy control method based on ackermann steering theorem for four wheel independent steering. Machinery & Electronics, 2014(8): 26-29 doi: 10.3969/j.issn.1001-2257.2014.08.007 [18] 李卫硕, 徐颖, 郭超, 李亚超, 严亚亚, 黄伟兵. 基于阿克曼算法的轮毂电动汽车控制方法研究. 测控技术, 2017, 36(3): 59-62 doi: 10.3969/j.issn.1000-8829.2017.03.015Li Wei-Shuo, Xu Ying, Guo Chao, Li Ya-Chao, Yan Ya-Ya, Hang Wei-Bing. Study on control method of motor-in-wheel electric vehicles based on ackermann algorithm. Measurement & Control Technology, 2017, 36(3): 59-62 doi: 10.3969/j.issn.1000-8829.2017.03.015 [19] Hrbacek J, Ripel T, Krejsa J. Ackermann mobile robot chassis with independent rear wheel drives. In: Proceedings of the 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010. Ohrid, Macedonia: IEEE, 2010. T5-46−T5-51 [20] Ackermann J, Utkin V. Sliding mode control design based on Ackermann's formula. IEEE Transactions on Automatic Control, 1998, 43(2): 234-237 doi: 10.1109/9.661072 [21] 方敏, 应艳杰, 汪洪波, 陈无畏. 基于整车转向模型的汽车主动悬架控制研究. 中国机械工程, 2006, 17(4): 431-434, 439 doi: 10.3321/j.issn:1004-132X.2006.04.025Fang Min, Ying Yan-Jie, Wang Hong-Bo, Chen Wu-Wei. Study on active suspension control based on full-vehicle model of steering and suspension systems. China Mechanical Engineering, 2006, 17(4): 431-434, 439 doi: 10.3321/j.issn:1004-132X.2006.04.025 [22] Di Cairano S, Tseng H E, Bernardini D, Bemporad A. Vehicle yaw stability control by coordinated active front steering and differential braking in the tire sideslip angles domain. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1236-1248 doi: 10.1109/TCST.2012.2198886 [23] Gao D W, Mi C, Emadi A. Modeling and simulation of electric and hybrid vehicles. Proceedings of the IEEE}, 2007, 95(4): 729-745 doi: 10.1109/JPROC.2006.890127 [24] Rajamani R, Piyabongkarn D N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 249-261 doi: 10.1109/TITS.2012.2215856 [25] Zhang X D, Gohlich D, Li J Y. Energy-efficient toque allocation design of traction and regenerative braking for distributed drive electric vehicles. IEEE Transactions on Vehicular Technology, 2018, 671: 285-295. [26] Mavromatis S, Laiou A, Yannis G. Safety assessment of control design parameters through vehicle dynamics model. Accident Analysis and Prevention, 2019, 125: 330-335 [27] 张亚新. 基于轮毂电机的电子差速控制系统研究[硕士学位论文], 山东理工大学, 中国, 2016.Zhang Ya-Xin. Research on Electronic Differential Control System Based on Wheel Hub Motor [Master thesis], Shandong University of Technology, China, 2016. [28] Lee J S, Ryoo Y J, Lim Y C, Freere P, Kim T G, Son S J, et al. A neural network model of electric differential system for electric vehicle. In: Proceedings of the 26th Annual Conference of the IEEE Industrial Electronics Society. IECON 2000. 2000 IEEE International Conference on Industrial Electronics, Control and Instrumentation. 21st Century Technologies. Nagoya, Japan: IEEE, 2000. 83−88 [29] Cordeiro A, Foito D, Guerreiro M. A sensolrless speed control system for an electric vehicle without mechanical differential gear. In: Proceedings of the 2006 IEEE Mediterranean Electrotechnical Conference. Malaga, Spain: IEEE, 2006. 1174−1177 [30] 周勇, 李声晋, 田海波, 方宗德, 周奇勋. 四轮毂电机电动车的电子差速控制方法. 电机与控制学报, 2007, 11(5): 467-471, 476 doi: 10.3969/j.issn.1007-449X.2007.05.007Zhou Yong, Li Sheng-Jin, Tian Hai-Bo, Fang Zong-De, Zhou Qi-Xun. Control method of electronic differential of EV with four in-wheel motors. Electric Machines and Control, 2007, 11(5): 467-471, 476 doi: 10.3969/j.issn.1007-449X.2007.05.007 [31] 邱恒浪. 基于轮毂电机的四轮驱动差速转向控制系统的研究[硕士学位论文], 西南大学, 中国, 2012.Qiu Heng-Lang. Research on Differential Steering Control System of Four-wheel Drive With In-wheel Motor [Master thesis], Southwest University, China, 2012. [32] Ravi A, Palani S. Robust electronic differential controller for an electric vehicle. American Journal of Applied Sciences, 2013, 10(11): 1356-1362 doi: 10.3844/ajassp.2013.1356.1362 [33] 潘汉明. 基于模糊神经网络的电动汽车电子差速控制系统的研究与开发[硕士学位论文], 浙江农林大学, 中国, 2016.Pan Han-Ming. Study and Exploitation on Electronic Differential Control System for Electric Vehicles Based on Fuzzy Neural Network [Master thesis], Zhejiang A&F University, China, 2016. [34] 杨朝阳. 多轴转向电动车辆的轮毂电机驱动控制研究[硕士学位论文], 集美大学, 中国, 2016.Yang Chao-Yang. Driving Control of the In-wheel Motor of Multi-axis Steering Electric Vehicls [Master thesis], Jimei University, China, 2016. [35] 葛英辉, 倪光正. 新的轮式驱动电动车电子差速控制算法的研究. 汽车工程, 2005, 27(3): 340-343 doi: 10.3321/j.issn:1000-680X.2005.03.020Ge Ying-Hui, Ni Guang-Zheng. A novel electronic differential algorithm for in-wheel motor driven EV. Automotive Engineering, 2005, 27(3): 340-343 doi: 10.3321/j.issn:1000-680X.2005.03.020 [36] 葛英辉. 轮式驱动电动车控制系统的研究[博士学位论文]. 浙江大学, 中国, 2005.Ge Ying-Hui. The Control System for In-wheel Driven Electric Vehicle [Ph.D. dissertation], Zhejiang University, China, 2005. [37] Hartani K, Bourahla M, Miloud Y, Sekour M. Electronic differential with direct torque fuzzy control for vehicle propulsion system. Turkish Journal of Electrical Engineering and Computer Sciences, 2009, 17(1): 21-38 [38] Chen Y, Wang J M. Design and evaluation on electric differentials for overactuated electric ground vehicles with four independent in-wheel motors. IEEE Transactions on Vehicular Technology, 2012, 61(4): 1534-1542 doi: 10.1109/TVT.2012.2187940 [39] Huu P N. Design of an electronic differential for a formula electric racecar. In: Proceedings of the 2013 International Electric Machines & Drives Conference. Chicago, USA: IEEE, 2013. 62−66 [40] 张素燕. 基于滑移率的轮毂式电动汽车电子差速控制方法研究 [硕士学位论文], 燕山大学, 中国, 2016.Zhang Su-Yan. Study on Electronic Differential Speed Control of Wheel Hub Electric Vehicles Based on Slip Ratio [Master thesis], Yanshan University, China, 2016. [41] 陈江松, 童亮, 陈勇. 纯电动汽车轮毂电机驱动电子差速研究. 北京信息科技大学学报, 2018, 33(5): 88-92Chen Jiang-Song, Tong Liang, Chen Yong. Electronic differential control of pure electric vehicle driven by hub motor. Journal of Beijing Information Science & Technology University, 2008, 33(5): 88-92 [42] Hou R F, Zhai L, Sun T M, Hou Y H, Hu G X. Steering stability control of a four in-wheel motor drive electric vehicle on a road with varying adhesion coefficient. IEEE Access, 2019, 7: 32617-32627 (本条文献与第26条文献重复,请联系作者确认) doi: 10.1109/ACCESS.2019.2901058 [43] 邹中华. 轮毂电机驱动电动汽车电子差速控制策略研究[硕士学位论文], 重庆大学, 中国, 2016.Zou Zhong-Hua. Research on Electronic Differential Control Strategies of In-wheel Motor Driving Vehicle [Master thesis], Chongqing University, China, 2016. [44] 马浩军. 电动汽车电子差速控制系统研究[硕士学位论文], 浙江大学, 中国, 2016.Ma Hao-Jun. Research of Electronic Differential Control System for Electric Vehicle [Master thesis], Zhejiang University, China, 2016. [45] 吴宏鑫, 沈少萍. PID控制的应用与理论依据. 控制工程, 2003, 10(1): 37-42 doi: 10.3969/j.issn.1671-7848.2003.01.009Wu Hong-Xin, Shen Shao-Ping. Basis of theory and applications on PID control. Control Engineering of China, 2003, 10(1): 37-42 doi: 10.3969/j.issn.1671-7848.2003.01.009 [46] Ang K H, Chong G, Li Y. PID control system analysis, design, and technology. IEEE Transactions on Control Systems Technology, 2005, 13(4): 559-576 doi: 10.1109/TCST.2005.847331 [47] Jung J W, Leu V Q, Do T D, Kim E K, Choi H H. Adaptive PID speed control design for permanent magnet synchronous motor drives. IEEE Transactions on Power Electronics, 2015, 30(2): 900-908 doi: 10.1109/TPEL.2014.2311462 [48] 谭会生, 廖雯. 模糊PID在轮式机器人转向控制中的应用. 湖南工业大学学报, 2018, 32(1): 81-87Tan Hui-Sheng, Liao Wen. Application of fuzzy PID in steering control of wheeled robots. Journal of Hunan University of Technology, 2008, 32(1): 81-87 [49] 王永富, 柴天佑, 迟瑛, 佟绍成. 基于观测器的一类非线性系统的自适应模糊控制. 控制理论与应用, 2005, 22(3): 395-401 doi: 10.3969/j.issn.1000-8152.2005.03.011Wang Yong-Fu, Chai Tian-You, Chi Ying, Tong Shao-Cheng. Observer-based adaptive fuzzy control for a class of nonlinear systems. Control Theory & Applications, 2005, 22(3): 395-401 doi: 10.3969/j.issn.1000-8152.2005.03.011 [50] Feng G. Analysis and Synthesis of Fuzzy Control Systems: A Model-based Approach. Boca Raton: CRC Press, 2010. [51] Zhang N N, Xu C M, Niu W J, Lu X H. The electronic differential control based on the slip ratio. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: IEEE, 2017. [52] 童贻银. 双电机后轮驱动电动汽车电子差速系统的仿真研究[硕士学位论文], 华南理工大学, 中国, 2016.Tong Yi-Yin. Simulation and Research on Electric Differential System of Electric Vehicle with Dual Motors [Master thesis], South China University of Technology, China, 2016. [53] 陆文昌, 张勇, 张厚忠. 轮毂电机驱动汽车电子差速系统P-模糊PID控制研究. 机械制造与自动化, 2017, 46(6): 193-196Lu Wen-Chang, Zhang Yong, Zhang Hou-Zhong. Research on p-fuzzy PID control of electronic differential system for in-wheel motor drive vehicle. Machine Building & Automation, 2017, 46(6): 193-196 [54] 沈勇, 吴新文. 基于复合神经网络模型的四轮独立驱动电动车控制. 汽车工程, 2004, 26(4): 458-460, 475 doi: 10.3321/j.issn:1000-680X.2004.04.022Shen Yong, Wu Xin-Wen. Multiplex neural network control of four-wheel drived electric vehicle. Automotive Engineering, 2004, 26(4): 458-460, 475 doi: 10.3321/j.issn:1000-680X.2004.04.022 [55] 焦李成, 杨淑媛, 刘芳, 王士刚, 冯志玺. 神经网络七十年: 回顾与展望. 计算机学报, 2016, 39(8): 1697-1717Jiao Li-Cheng, Yang Shu-Yuan, Liu Fang, Wang Shi-Gang, Feng Zhi-Xi. Seventy years beyond neural networks: Retrospect and prospect. Chinese Journal of Computers, 2016, 39(8): 1697-1717 [56] Yu J P, Shi P, Dong W J, Chen B, Lin C. Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(3): 640-645 doi: 10.1109/TNNLS.2014.2316289 [57] 翟丽, 董守全, 罗开宇. 四轮毂电机独立驱动车辆转向电子差速控制. 北京理工大学学报, 2010, 30(8): 901-905Zhai Li, Dong Shou-Quan, Luo Kai-Yu. Electronic differential speed steering control for four in-wheel motors independent drive vehicle. Transactions of Beijing Institute of Technology, 2010, 30(8): 901-905 [58] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展. 控制理论与应用, 2007, 24(3): 407-418 doi: 10.3969/j.issn.1000-8152.2007.03.015Liu Jin-Kun, Sun Fu-Chun. Research and development on theory and algorithms of sliding mode control. Control Theory & Applications, 2007, 24(3): 407-418 doi: 10.3969/j.issn.1000-8152.2007.03.015 [59] 穆效江, 陈阳舟. 滑模变结构控制理论研究综述. 控制工程, 2007, 14(S1): 1-5Mu Xiao-Jiang, Chen Yang-Zhou. Overview of sliding mode variable structure control. Control Engineering of China, 2007, 14(S1): 1-5 [60] 卢山峰, 徐兴, 陈龙, 王峰, 王吴杰. 轮毂电机驱动汽车电子差速与差动助力转向的协调控制. 机械工程学报, 2017, 53(16): 78-85 doi: 10.3901/JME.2017.16.078Lu Shan-Feng, Xu Xing, Chen Long, Wang Feng, Wang Wu-Jie. Coordinated control of electronic differential and differential assist steering for electric vehicle driven by in-wheel motors. Journal of Mechanical Engineering, 2017, 53(16): 78-85 doi: 10.3901/JME.2017.16.078 [61] 杨云庆, 赵红兵, 王吴杰, 徐兴. 双轮毂电机驱动电动汽车电子差速控制研究. 拖拉机与农用运输车, 2018, 45(5): 34-39, 50Yang Yun-Qing, Zhao Hong-Bing, Wang Wu-Jie, Xu Xing. Study on electronic differential control of electric vehicle with dual in-wheel-motor drive. Tractor & Farm Transporter, 2008, 45(5): 34-39, 50 [62] Esmailzadeh E, Goodarzi A, Vossoughi G R. Optimal yaw moment control law for improved vehicle handling. Mechatronics, 2003, 13(7): 659-675 doi: 10.1016/S0957-4158(02)00036-3 [63] 高桂革. 最优控制理论的发展与展望. 上海电机学院学报, 2005, 8(3): 33-35, 39 doi: 10.3969/j.issn.2095-0020.2005.03.010Gao Gui-Ge. Development and prospect of optimal control. Journal of Shanghai Dianji University, 2005, 8(3): 33-35, 39 doi: 10.3969/j.issn.2095-0020.2005.03.010 [64] 臧怀泉, 戴彦, 张素燕, 邸聪那. 一种基于相对滑移率的电动汽车电子差速控制方法研究. 机械工程学报, 2017, 53(16): 112-119 doi: 10.3901/JME.2017.16.112Zang Huai-Quan, Dai Yan, Zhang Su-Yan, Di Cong-Na. Research on electronic differential control method of electric vehicle based on relatively slip rate. Journal of Mechanical Engineering, 2017, 53(16): 112-119 doi: 10.3901/JME.2017.16.112 [65] 管萍, 黄巧亮. 轮毂电动汽车电子差速控制器设计研究. 计算机仿真, 2018, 35(9): 155-160 doi: 10.3969/j.issn.1006-9348.2018.09.031Guan Ping, Huang Qiao-Liang. Research on electronic differential controller forin-wheeldriven electric vehicle. Computer Simulation, 2008, 35(9): 155-160 doi: 10.3969/j.issn.1006-9348.2018.09.031 -

 下载:
下载:





计量
- 文章访问数: 5307
- HTML全文浏览量: 1848
- PDF下载量: 538
- 被引次数: 0
