

Joint Fault Diagnosis Method of Multiclass Faults for Traction Rectifier in High-speed Train
-
摘要: 提出了一种高速列车牵引整流器多类故障联合诊断方法. 首先, 基于三电平牵引整流器开路故障分析, 建立整流器所有功率器件开路故障以及正常运行的状态空间模型并构建相应状态观测器. 然后, 基于正常状态观测器进行故障检测, 检测到故障后, 基于故障观测器区分功率器件开路故障和网侧电流传感器故障, 进而诊断出功率器件开路故障位置和网侧电流传感器故障类型. 实时仿真结果验证了本文方法的正确性和有效性.Abstract: A joint fault diagnosis method of multiclass faults for the traction rectifier in high-speed train is proposed. First of all, based on open-circuit fault analysis of three-level traction rectifier, the state space models of rectifier operating in the normal condition and abnormal conditions that open-circuit fault happened in all power devices are built respectively. The corresponding state observers are established as well. Next the fault is detected by the normal state observer, open-circuit faults in power devices and grid side current sensor faults are distinguished by the fault state observers. Then the open-circuit fault location of power devices and fault type of grid side current sensor are obtained. The feasibility and effectiveness of the proposed method are verified by the real-time simulation results.
-
Key words:
- Open-circuit fault /
- sensor fault /
- joint diagnosis /
- traction rectifier /
- high-speed train
-
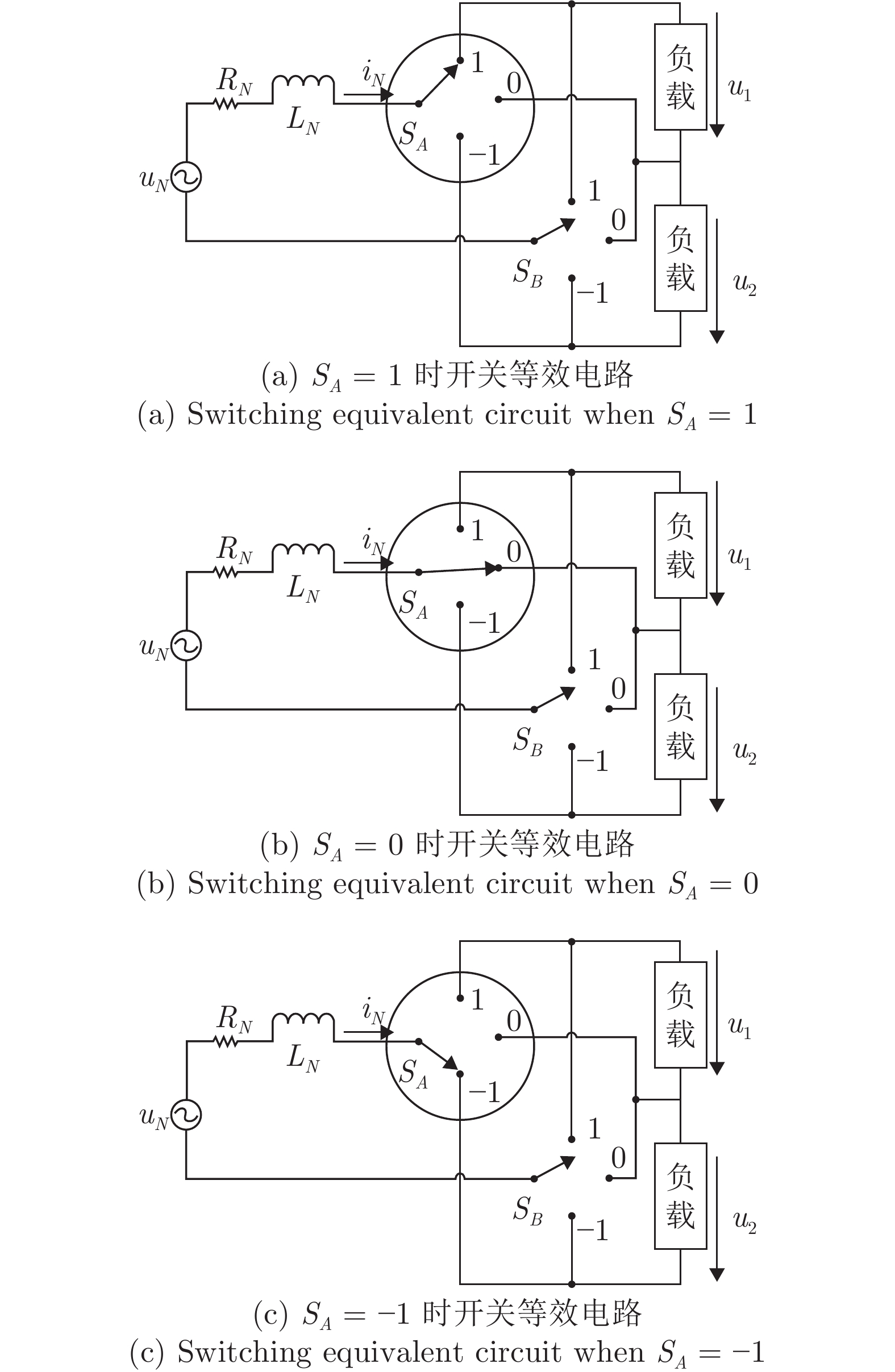
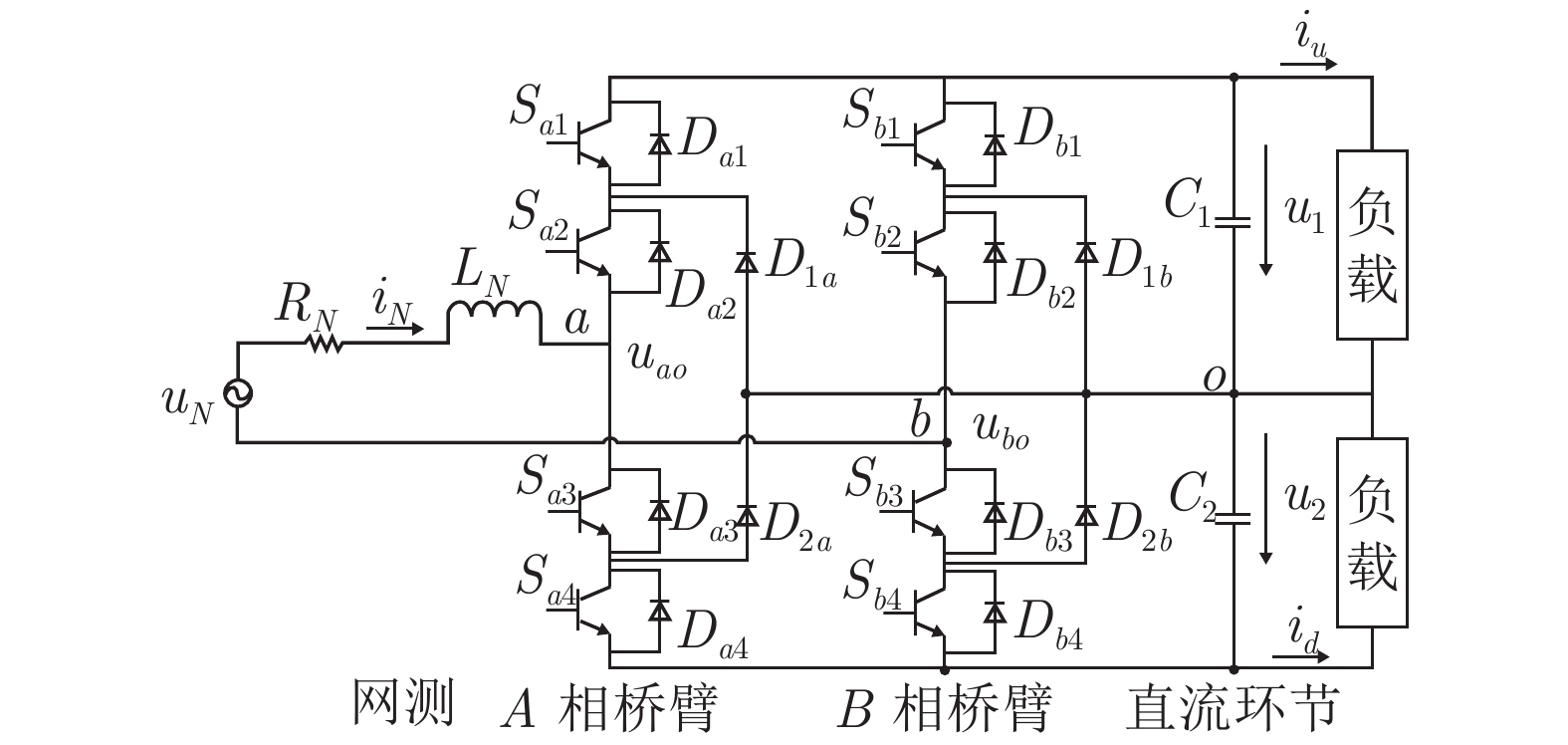
图 3 不同运行情况下三电平整流器开关等效电路
Fig. 3 Switching equivalent circuit of three-level rectifier in different operation conditions

图 4 多类故障联合诊断方法流程图
Fig. 4 Flowchart of joint fault diagnosis method for multiclass faults
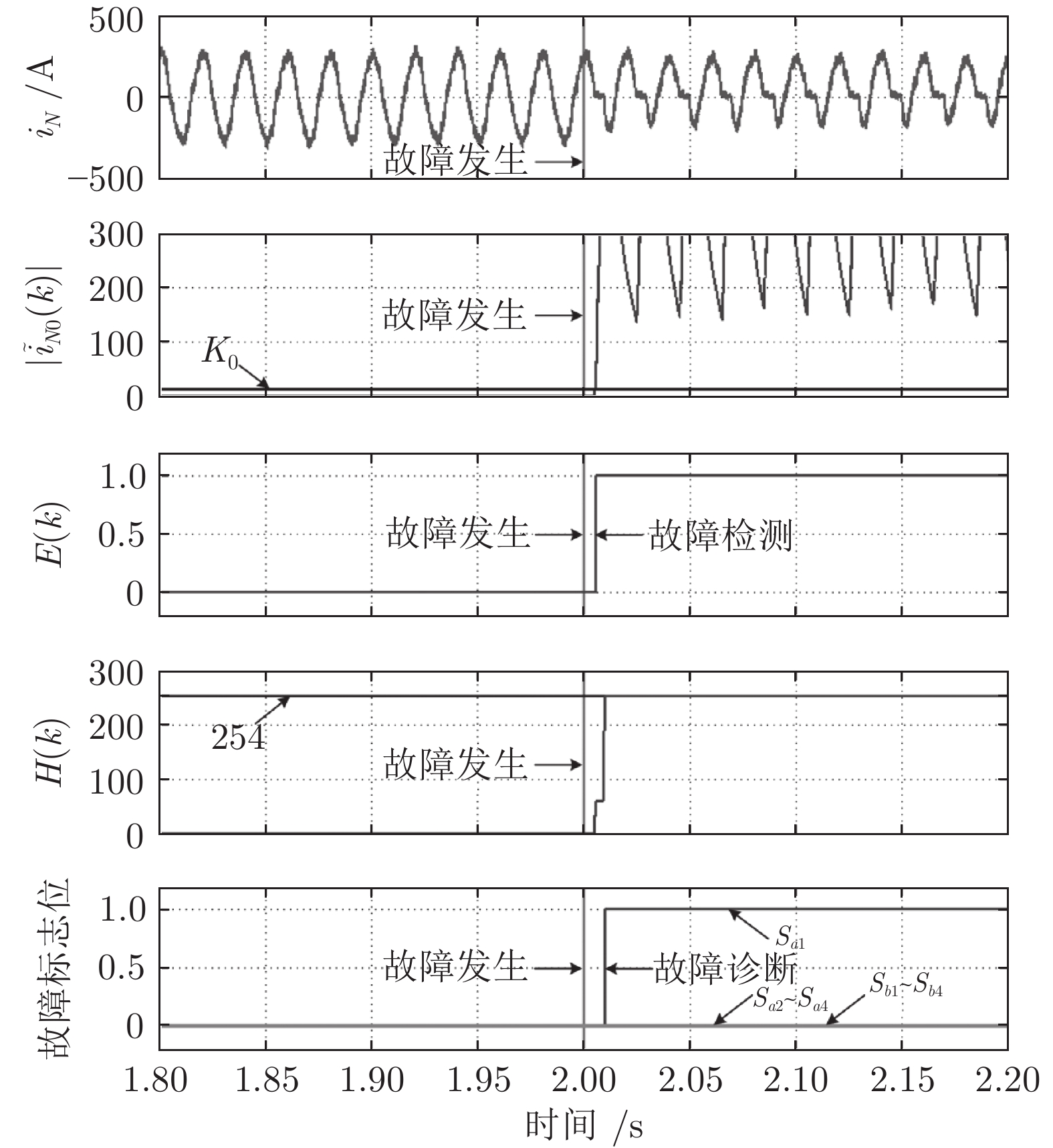
图 6
$S_{a1}$ 开路故障诊断结果Fig. 6 Results of fault diagnosis when open-circuit fault occurs in
$S_{a1}$ 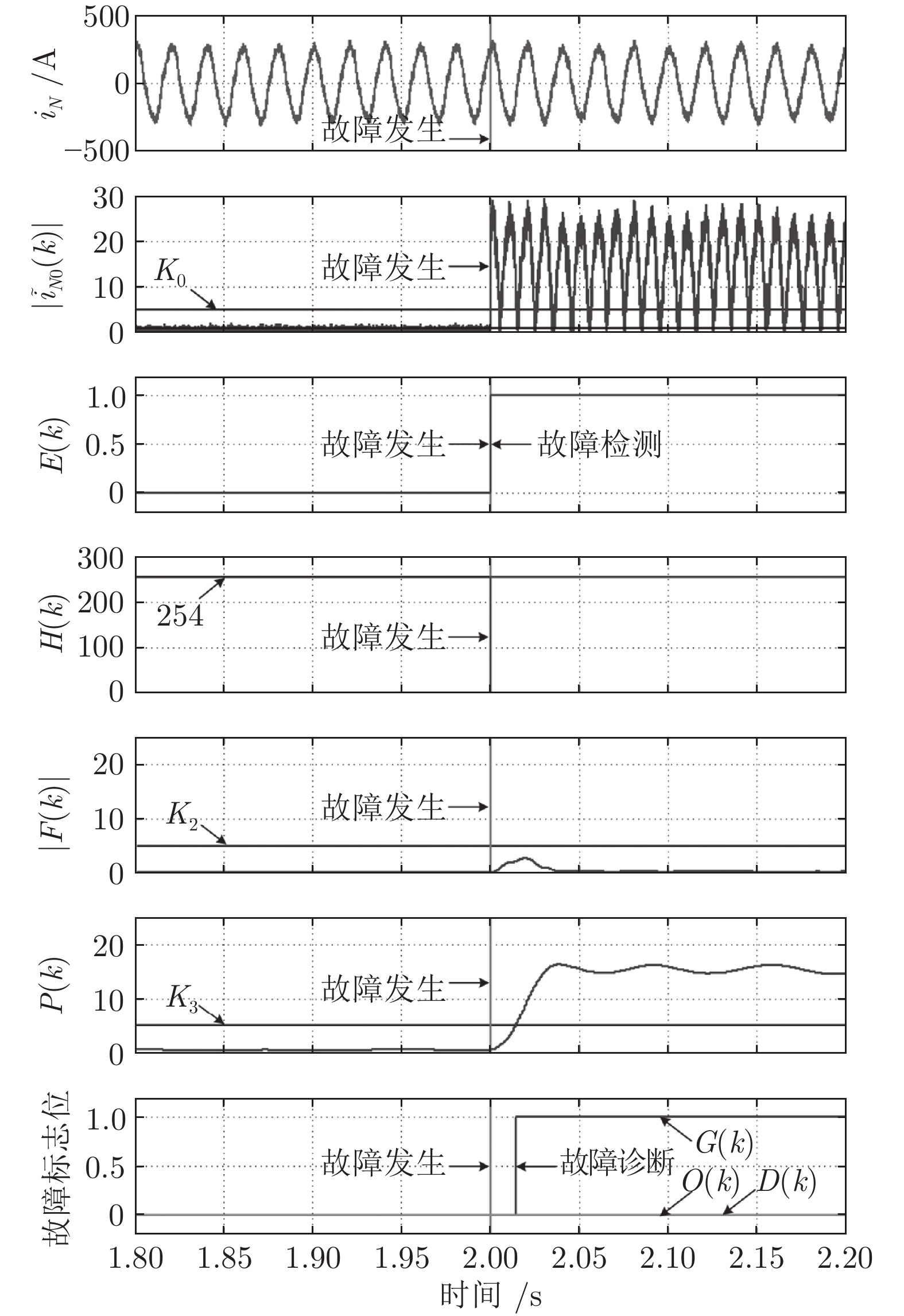
图 7 网侧电流传感器增益故障诊断结果
Fig. 7 Results of fault diagnosis when gain fault occurs in grid current sensor

图 8 网侧电流传感器偏移故障诊断结果
Fig. 8 Results of fault diagnosis when offset fault occurs in grid current senso

图 9 网侧电流传感器漂移故障诊断结果
Fig. 9 Results of fault diagnosis when drift fault occurs in grid current sensor
表 1
$ H(k) $ 与故障位置的关系Table 1 Relationship of
$ H(k) $ and fault loaction$ H(k) $ 故障位置 255 电流传感器 254 $ S_{a1} $ 253 $ S_{a2} $ 251 $ S_{a3} $ 247 $ S_{a4} $ 236 $ S_{b1} $ 223 $ S_{b2} $ 191 $ S_{b3} $ 127 $ S_{b4} $  下载: 导出CSV
下载: 导出CSV
表 2 变流器参数
Table 2 Parameter of converter
参数 符号 值 网侧电压有效值 $u_{N}$ 1500 V 变压器电感 $L_{N}$ 2 mH 变压器电阻 $R_{N}$ 0.2 $\Omega$ 直流环节电压 $u_{1},u_{2}$ 1 300 V 支撑电容 $C_{1},C_{2}$ 1 600 mF
下载: 导出CSV
表 3 牵引电机参数
Table 3 Parameter of traction motor
参数 符号 值 定子电阻 $R_{s}$ 0.15 $\Omega$ 定子电感 $L_{ls}$ 1.42 mH 转子电阻 $R_{r}$ 0.16 $\Omega$ 转子电感 $L_{lr}$ 0.6 mH 互感 $L_{m}$ 25.4 mH 额定电压 $U_{\rm{rate}}$ 2 000 V 额定频率 $f_{\rm{rate}}$ 140 Hz 额定转速 $n_{\rm{rate}}$ 4 140 r/min 额定输出功率 $P_{\rm{rate}}$ 300 kW 额定转差率 $s_{\rm{rate}}$ 1.4 %
下载: 导出CSV
-
[1] 周东华, 纪洪泉, 何潇. 高速列车信息控制系统的故障诊断技术. 自动化学报, 2018, 44(7): 1153−11641 Zhou Dong-Hua, Ji Hong-Quan, He Xiao. Fault diagnosis techniques for the information control system of high-speed trains. Acta Automatica Sinica, 2018, 44(7): 1153−1164 [2] 2 Steimel A. Electric railway traction in Europe. IEEE Industry Applications Magazine, 2002, 2(6): 6−17 [3] 3 Yang X Y, Yang C H, Peng T, Chen Z W, Liu B, Gui W H. Hardware-in-the-Loop fault injection for traction control system. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2018, 6(2): 697−706 [4] 戴舜华. CRH 2型系列动车组牵引变流器介绍及故障分析. 铁道机车车辆, 2013, 33(2): 93−97 doi: 10.3969/j.issn.1008-7842.2013.02.214 Dai Shun-Hua. Introduction and failure analysis of traction converter for CRH 2 EMUs. Railway Locomotive and Car, 2013, 33(2): 93−97 doi: 10.3969/j.issn.1008-7842.2013.02.21 [5] 5 Yang S Y, Xiang D W, Bryant A, Mawby P, Ran L, Tavner P. Condition monitoring for device reliability in power electronic converters: a review. IEEE Transactions on Power Electronics, 2010, 25(11): 2734−2752 doi: 10.1109/TPEL.2010.2049377 [6] 6 Tao H W, Peng T, Yang C, Chen Z W, Yang C H, Gui W H. Open-circuit fault analysis and modeling for power converter based on single arm model. Electronics, 2019, 8(6): 633 doi: 10.3390/electronics8060633 [7] 7 Lu B, Sharma S K. A literature review of IGBT fault diagnostic and protection methods for power inverters. IEEE Transactions on Industry Applications, 2009, 45(5): 1770−1777 doi: 10.1109/TIA.2009.2027535 [8] 8 Peng T, Tao H W, Yang C, Chen Z W, Yang C H, Gui W H, Karimi H R. A uniform modeling method based on open-circuit faults analysis for NPC-three-level converter. IEEE Transactions on Circuits and Systems II: Express Briefs, 2019, 66(3): 457−461 doi: 10.1109/TCSII.2018.2856862 [9] 9 Huang Z J, Wang Z S, Zhang H G. A diagnosis algorithm for multiple open-circuited faults of microgrid inverters based on main fault component analysis. IEEE Transactions on Energy Conversion, 2018, 33(3): 925−937 doi: 10.1109/TEC.2018.2822481 [10] 10 Zhao H S, Cheng L L. Open-circuit faults diagnosis in back-to-back converters of DF wind turbine. IET Renewable Power Generation, 2017, 11(4): 417−424 doi: 10.1049/iet-rpg.2016.0150 [11] 11 Li Z, Peng T, Zhang P F, Han H, Yang J. Fault diagnosis and fault-tolerant control of photovoltaic micro-inverter. Journal of Central South University, 2016, 23(9): 2284−2295 doi: 10.1007/s11771-016-3286-7 [12] 12 Xie D, Ge X L. A state estimator-based approach for opencircuit fault diagnosis in single-phase cascaded H-bridge rectifiers. IEEE Transactions on Industry Applications, 2019, 55(2): 1608−1618 doi: 10.1109/TIA.2018.2873533 [13] 13 Wu F, Zhao J. Current similarity analysis based opencircuit fault diagnosis for two-level three-phase PWM rectifier. IEEE Transactions on Power Electronic, 2017, 32(5): 3935−3945 doi: 10.1109/TPEL.2016.2587339 [14] 14 Youssef A B, El Khil S K, Slama-Belkhodja I. State observer-based sensor fault detection and isolation, and fault tolerant control of a single-phase PWM rectifier for electric railway traction. IEEE Transactions on Power Electronics, 2013, 28(12): 5842−5853 doi: 10.1109/TPEL.2013.2257862 [15] 15 Wang X Q, Wang Z, Xu Z X, Cheng M, Wang W, Hu Y H. Comprehensive diagnosis and tolerance strategies for electrical faults and sensor faults in dual three-phase PMSM drives. IEEE Transactions on Power Electronics, 2019, 34(7): 6669−6684 doi: 10.1109/TPEL.2018.2876400 [16] 16 Chen Z W, Yang C H, Peng T, Dan H B, Li C G, Gui W H. A cumulative canonical correlation analysis-based sensor precision degradation detection method. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6321−6330 doi: 10.1109/TIE.2018.2873100 [17] 17 Gou B, Ge X L, Wang S L, Feng X Y, Kuo J B, Haberler T G. An open-switch fault diagnosis method for singlephase PWM rectifier using a model-based approach in high-speed railway electrical traction drive system. IEEE Transactions on Power Electronics, 2016, 31(5): 3816−3826 doi: 10.1109/TPEL.2015.2465299 [18] 18 Ge X L, Pu J K, Gou B, Liu Y C. An open-circuit fault diagnosis approach for single-phase three-level neutralpoint-clamped converters. IEEE Transactions on Power Electronics, 2018, 33(3): 2559−2570 doi: 10.1109/TPEL.2017.2691804 [19] 19 Wu F, Zhao J. A real-time multiple open-circuit fault diagnosis method in voltage-source-inverter fed vector controlled drives. IEEE Transactions on Power Electronics, 2016, 31(2): 1425−1437 doi: 10.1109/TPEL.2015.2422131 [20] 苟斌, 蒲俊楷, 葛兴来, 冯晓云. 基于状态观测器的单相整流系统传感器故障诊断与容错控制方法. 铁道学报, 2017, 39(2): 44−51 doi: 10.3969/j.issn.1001-8360.2017.02.00720 Gou Bin, Pu Jun-Kai, Ge Xing-Lai, Feng Xiao-Yun. A fault diagnosis and fault-Tolerant control method based on state observer for sensor in single-phase PWM rectifiers. Journal of the China Railway Society, 2017, 39(2): 44−51 doi: 10.3969/j.issn.1001-8360.2017.02.007 [21] 于冰, 蒋生成, 王高林, 赵文龙, 徐殿国. 基于状态观测器的感应电机速度传感器故障诊断及容错控制. 中国电机工程学报, 2012, 32(18): 123−13021 Yu Bing, Jiang Sheng-Cheng, Wang Gao-Lin, Zhao Wen-Long, Xu Dian-Guo. Fault diagnosis and tolerant control for speed sensors based on state observers in induction motor drives. Proceedings of the CSEE, 2012, 32(18): 123−130 [22] 22 Yang C H, Yang C, Peng T, Yang X Y, Gui W H. A fault-injection strategy for traction drive control systems. IEEE Transactions on Industrial Electronics, 2017, 6(7): 5719−5727 -

 下载:
下载:






计量
- 文章访问数: 2664
- HTML全文浏览量: 1004
- PDF下载量: 226
- 被引次数: 0
