

-
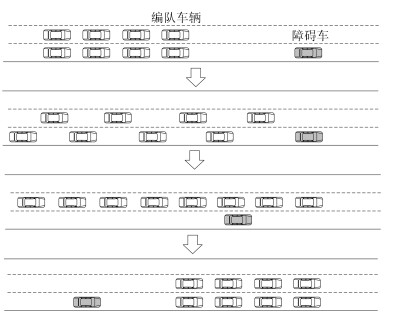
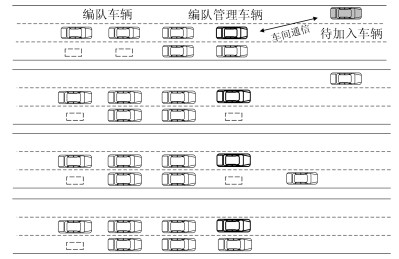
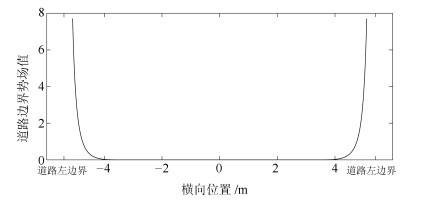
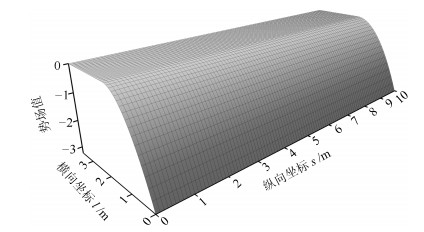
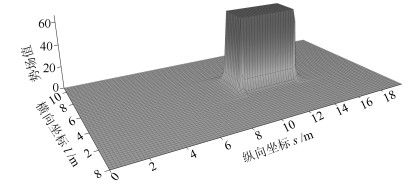
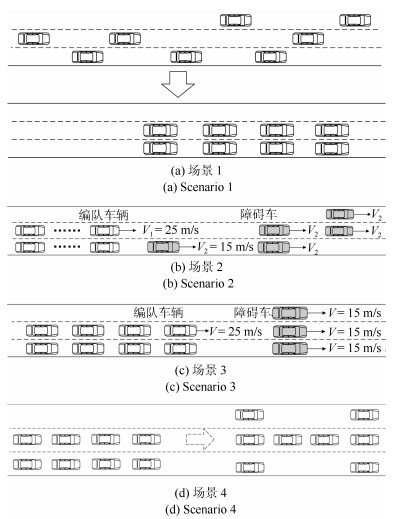
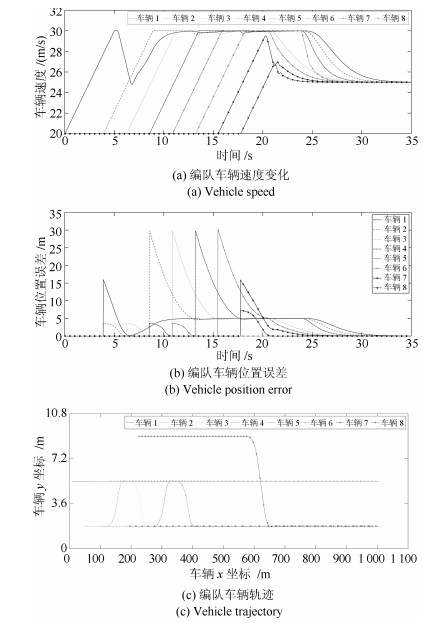
摘要: 多车协同驾驶能显著提高交通安全和效率, 是未来5G网联自动驾驶技术的重要应用场景之一.传统上, 多车协同驾驶的主要形式为单一车道上的无人车队列, 其队列稳定性受队列长度、通信距离及延迟的限制.本文提出一种无人车编队方法, 将单车道队列扩展为多车道护航编队.针对不同场景下的需求设计多车道编队调整策略, 结合基于图的分布式控制, 完成任意预定义的编队结构; 同时, 利用势场法对行车环境建立势场模型, 实现无人车的避障轨迹规划, 提高编队的避障能力; 最后, 结合纵横向控制器, 实现无人车多车道护航编队控制.仿真实验表明, 本文提出的无人车多车道护航编队方法, 能适应不同交通场景, 如道路变化、障碍车运动等, 完成自动变换编队结构, 实现安全、高效通行.Abstract: Multi-vehicle cooperative driving can significantly improve traffic safety and efficiency, and is one of the important application scenarios for the automatic driving technologies using the 5G network. Traditionally, multi-vehicle cooperative driving is mainly in the form of a single lane vehicle platoon. And the string stability of a vehicle platoon is limited by the platoon length, communication distance and delay. The unmanned vehicle formation method presented in this paper expands the single lane platoon into a multi-lane convoy. Specifically, a multi-lane formation adjustment strategy is designed for the requirements in different scenarios, and any pre-defined formation structure can be completed through the graph-based distributed control. Meanwhile, the potential field models of the driving environment are established by the potential field method for realizing the local trajectory planning of the unmanned vehicle, and the obstacle avoidance capability of the formation is enhanced. Finally, combined with the lateral and longitudinal controllers, the multi-lane convoy formation control of the unmanned vehicle is implemented. The simulation results show that the multi-lane convoy of unmanned vehicles can adapt different traffic conditions with various road environments and obstacles, and can autonomously transform the formation structure to pass the experimental segments safely and efficiently.
-
Key words:
- Multi-lane convoys /
- graph method /
- potential field /
- trajectory planning /
- unmanned vehicles
1) 本文责任编委 郭戈 -
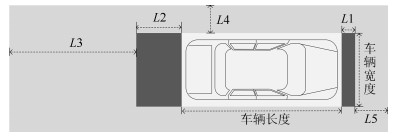
表 1 势场与控制器相关参数
Table 1 Parameters of the potentials and the controller and potential field
参数 值 单位 参数 值 单位 $k_{*}$ 0.8 - $L3$ 135 m $\lambda_{*}$ $2.1/K$ - $L4$ 0.8 m ${S1}$ 5 m $L$ 3 m ${S2}$ 2 m $l_{1}$ 3 - ${S3}$ 0.8 m $l_{2}$ 10 - ${L1}$ 5 m $\lambda_{1}$ 0.5 - ${L2}$ 15 m $K$ 1.25 -  下载: 导出CSV
下载: 导出CSV
-
[1] Xu L, Wang L Y, Yin G, Zhang H. Communication information structures and contents for enhanced safety of highway vehicle platoons. IEEE Transactions on Vehicular Technology, 2014, 63(9): 4206-4220 doi: 10.1109/TVT.2014.2311384 [2] Farokhi F, Johansson K H. A game-theoretic framework for studying truck platooning incentives. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems. Hague, Netherlands: IEEE, 2013. 1253-1260 [3] Liang K Y, Martensson J, Johansson K H. When is it fuel efficient for a heavy duty vehicle to catch up with a platoon? International Federation of Automatic Control Proceedings Volumes, 2013, 46(21): 738-743 [4] Xiao L, Gao F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194 doi: 10.1109/TITS.2011.2143407 [5] Seiler P, Pant A, Hedrick K. Disturbance propagation in vehicle strings. IEEE Transactions on Automatic Control, 2004, 49(10): 1835-1842 doi: 10.1109/TAC.2004.835586 [6] Kato S, Tsugawa S, Tokuda K. Vehicle control algorithms for cooperative driving with automated vehicles and intervehicle communications. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(3): 155-161 doi: 10.1109/TITS.2002.802929 [7] Gowal S, Falconi R, Martinoli A. Local graph-based distributed control for safe highway platooning. In: Proceedings of the 2010 IEEE International Conference on Intelligent Robots and Systems. Taiwan, China: IEEE, 2010. 6070-6076 [8] Falconi R, Gowal S, Martinoli A. Graph based distributed control of non-holonomic vehicles endowed with local positioning information engaged in escorting missions. In: Proceedings of the 2010 IEEE International Conference on Intelligent Robots and Systems. Taiwan, China: IEEE, 2010. 3207-3214 [9] Marjovi A, Vasic M, Lemaitre J, Martinoli A. Distributed graph-based convoy control for networked intelligent vehicles. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium. Seoul, South Korea: IEEE, 2015. 138-143 [10] Qian X, De La Fortelle A, Moutarde F. A hierarchical model predictive control framework for on-road formation control of autonomous vehicles. In: Proceedings of the 2016 IEEE Intelligent Vehicles Symposium. Gotenburg, Sweden: IEEE, 2016. 376-381 [11] Navarro I, Zimmermann F, Vasic M, Martinoli A. Distributed graph-based control of convoys of heterogeneous vehicles using curvilinear road coordinates. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016. 879-886 [12] Bounini F, Gingras D, Pollart H, Gruyer D. Modified artificial potential field method for online path planning applications. In: Proceedings of the the 2017 IEEE Intelligent Vehicles Symposium. California, USA: IEEE, 2017. 180-185 [13] Gautam R, Kala R. Motion planning for a chain of mobile robots using A* and potential field. Robotics, 2018, 7(2): 20-21 doi: 10.3390/robotics7020020 [14] Huang Z, Chu D, Wu C, He Y. Path planning and cooperative control for automated vehicle platoon using hybrid automata. IEEE Transactions on Intelligent Transportation Systems, 2018, 1(99): 1-16 [15] Mesbahi M, Egerstedt M. Graph Theoretic Methods in Multiagent Networks. New Jersey: Princeton University Press, 2010. [16] Linderoth M, Soltesz K, Murray R M. Nonlinear lateral control strategy for nonholonomic vehicles. In: Proceedings of the the 2008 American Control Conference. Washington, USA: IEEE, 2008. 3219-3224 -

 下载:
下载:








图(16) / 表(1)
计量
- 文章访问数: 3041
- HTML全文浏览量: 896
- PDF下载量: 350
- 被引次数: 0
