

A Multi-level Tree Search Algorithm for Three Dimensional Container Loading Problem
-
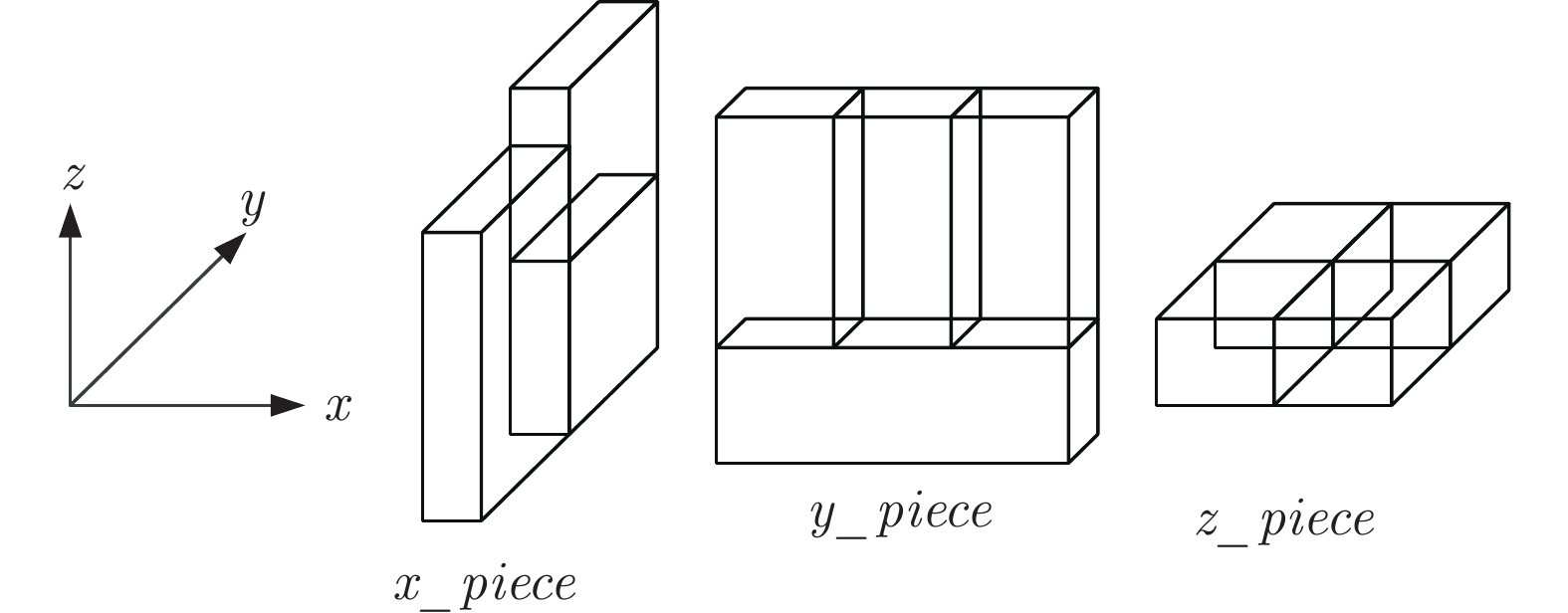
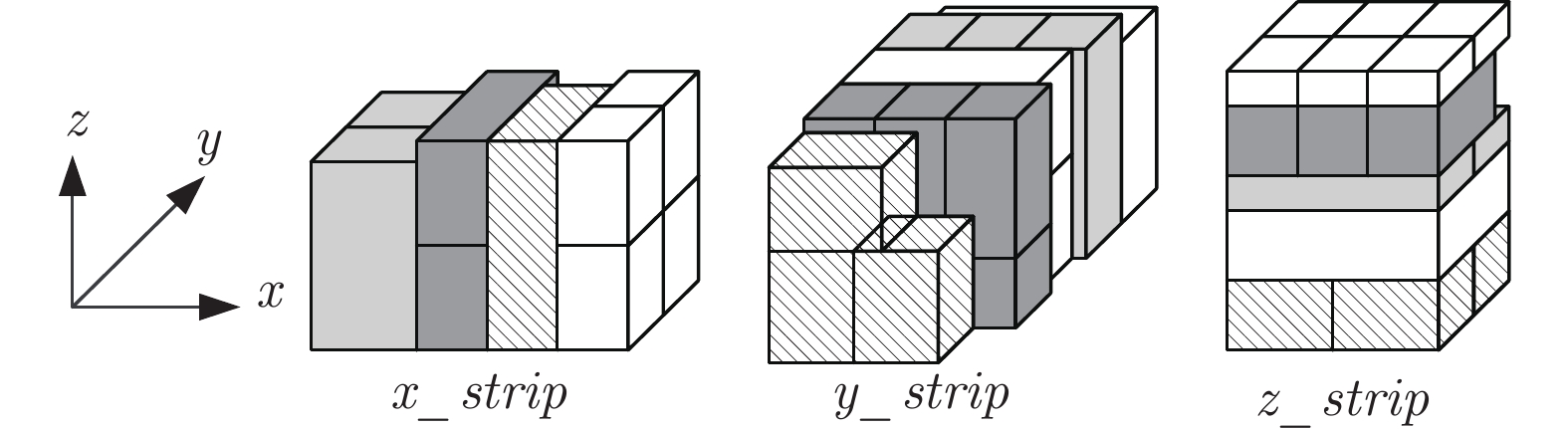
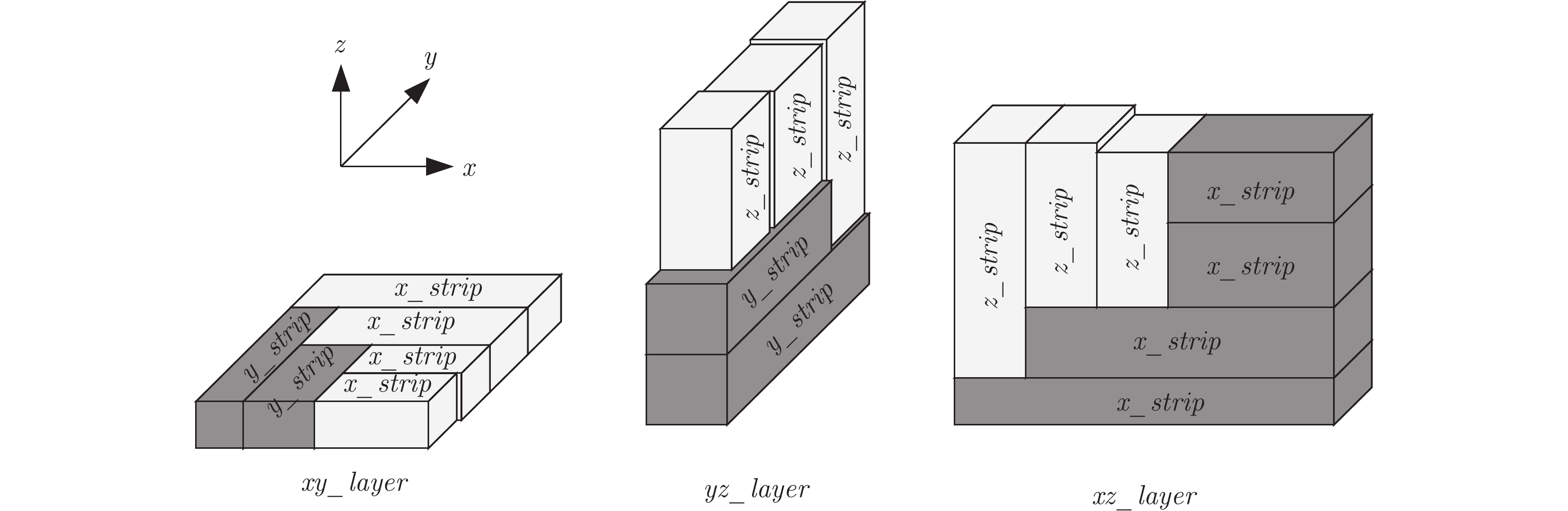
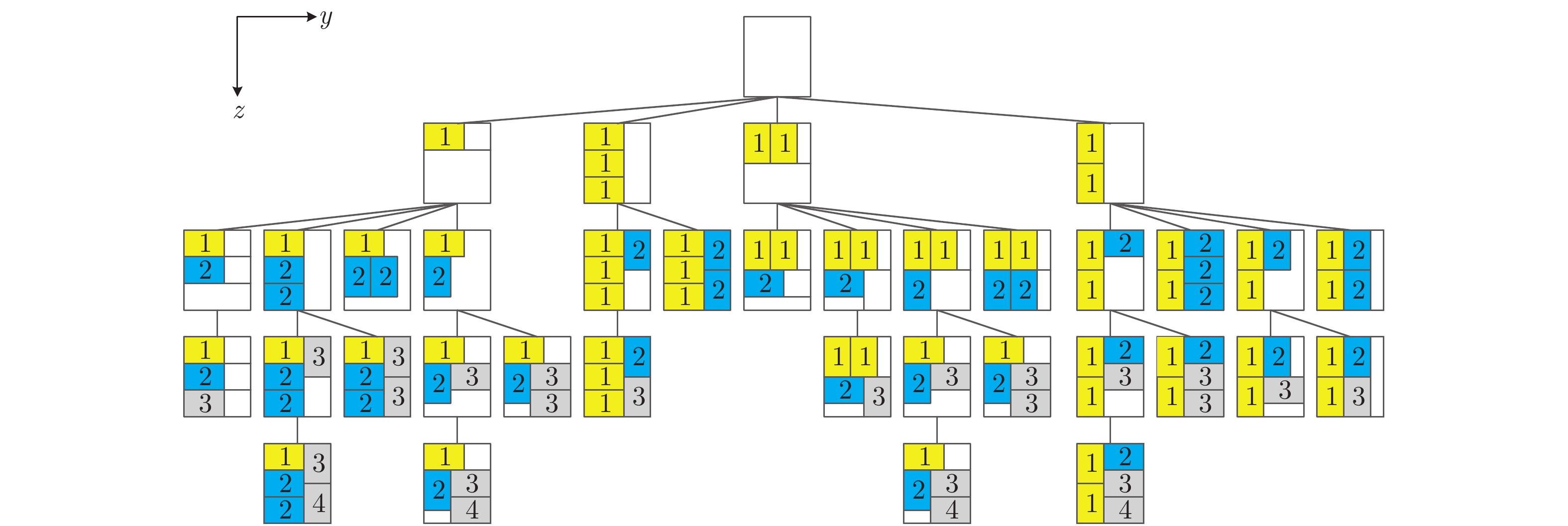
摘要: 提出了一种求解三维装箱问题的多层树搜索算法, 该算法采用箱子–片–条–层–实体的顺序生成装载方案, 装载方案由实体表示. 该算法由3层搜索树构成. 第1层为三叉树, 每个树节点的3个分叉分别对应向实体中填入XY面平行层、XZ面平行层、YZ面平行层; 第2层为二叉树, 每个树节点的两个分叉分别对应向层内装载两个相互垂直的最优条; 第3层为四叉树, 用于将同种的多个箱子生成片. 在同时满足摆放方向约束和完全支撑约束的前提下, 该算法求解BR12~BR15得到的填充率高于现有装箱算法.Abstract: This paper presents a multiple-level tree search algorithm for the three dimensional container loading problem. This algorithm generates a loading plan in the box-piece-strip-layer-entity sequence. Hereby an entity denotes a loading plan. This algorithm consists of three levels of search tree. The first level is a ternary tree. In this tree the three branches of each node correspond to filling three layers which are parallel to the XY-plane, the XZ-plane, and the YZ-plane, respectively. The second level is a binary tree. In this tree the two branches of each node correspond to loading two orthogonal strips into a layer, respectively. The third level is a quad tree to search the best piece. In this tree the boxes of the same kind are integrated into a piece. The proposed algorithm achieves better filling rate for BR12~BR15 than the existing algorithms when the orientation constraint and the full-support constraint are satisfied.
-

图 1 坐标系和容器、箱子尺寸和摆放方向示意图
Fig. 1 Examples of coordination, size, and orientations of container and box
表 1 各种算法对BR1~BR7的填充率比较
Table 1 Comparison of filling rates of BR1~BR7 by various algorithms
算法 约束 填充率 (%) BR1 BR2 BR3 BR4 BR5 BR6 BR7 平均 GA_GB[16] C1&C2 85.80 87.26 88.10 88.04 87.86 87.85 87.68 87.5 GRASP[23] C1 93.52 93.77 93.58 93.05 92.34 91.72 90.55 92.65 FDA[11] C1 92.92 93.93 93.71 93.68 93.73 93.63 93.14 93.53 HSA[21] C1&C2 93.81 93.94 93.86 93.57 93.22 92.72 91.99 93.30 Maximal-space[24] C1 93.85 94.22 94.25 94.09 93.87 93.52 92.94 93.82 A2[12] C1 − − − − − − − − CLTRS[7] C1 95.05 95.43 95.47 95.18 95.00 94.79 94.24 95.02 C1&C2 94.51 94.73 94.74 94.41 94.13 93.85 93.20 94.22 MLHS[31] C1 94.92 95.48 95.69 95.53 95.44 95.38 94.95 95.34 C1&C2 94.49 94.89 95.20 94.94 94.78 94.55 93.95 94.69 MLTrS C1 93.81 93.83 93.80 93.98 93.97 93.83 93.91 93.88 C1&C2 93.48 93.41 93.79 93.85 93.43 93.65 93.63 93.61  下载: 导出CSV
下载: 导出CSV
表 2 各种算法对BR8~BR15的填充率比较
Table 2 Comparison of filling rates of BR8~BR15 by various algorithms
算法 约束 填充率 (%) BR8 BR9 BR10 BR11 BR12 BR13 BR14 BR15 平均 GA_GB[15] C1&C2 87.52 86.46 85.53 84.82 84.25 83.67 82.99 82.47 84.71 GRASP[23] C1 90.26 89.50 88.73 87.87 87.18 86.70 85.81 85.48 87.69 FDA[11] C1 92.92 92.49 92.24 91.91 91.83 91.56 91.30 91.02 91.9 HSA[21] C1&C2 90.56 89.7 89.06 88.18 87.73 86.97 86.16 85.44 87.98 Maximal-space[24] C1 91.02 90.46 89.87 89.36 89.03 88.56 88.46 88.36 89.39 A2[12] C1 88.41 88.14 87.9 87.88 87.92 87.92 87.82 87.73 87.97 CLTRS[7] C1 93.70 93.44 93.09 92.81 92.73 92.46 92.40 92.40 92.88 C1&C2 92.26 91.48 90.86 90.11 89.51 88.98 88.26 87.57 89.88 MLHS[31] C1 94.54 94.14 93.95 93.61 93.38 93.14 93.06 92.90 93.59 C1&C2 93.12 92.48 91.83 91.23 90.59 89.99 89.34 88.54 90.89 MLTrS C1 93.98 93.97 93.78 93.75 93.63 93.43 93.25 93.12 93.61 C1&C2 91.82 91.69 91.55 91.24 91.21 91.03 90.78 90.59 91.24
下载: 导出CSV
-
[1] Dyckhoff H, Finke U. Cutting and Packing in Production and Distribution. Heidelberg: Physica-Verlag, 1992 [2] George J A, Robinson D F. A heuristic for packing boxes into a container. Computers and Operations Research, 1980, 7(3): 147−156 doi: 10.1016/0305-0548(80)90001-5 [3] Dyckhoff, H. A typology of cutting and packing problems. European Journal of Operational Research, 1990, 44(2): 145−159 doi: 10.1016/0377-2217(90)90350-K [4] Wäscher G, Haußner H, Schumann H. An improved typology of cutting and packing problems. European Journal of Operational Research, 2007, 183(3): 1109−1130 doi: 10.1016/j.ejor.2005.12.047 [5] Bortfeldt A, Wäscher G. Constraints in container loading — a state-of-the-art review. European Journal of Operational Research, 2013, 229(1): 1−20 doi: 10.1016/j.ejor.2012.12.006 [6] Scheithauer G. Algorithms for the container loading problem. In: Proceedings of the 1991 on Operations Research. Berlin, Heidelberg, Germany: Springer, 1992. 445−452 [7] Fanslau T, Bortfeldt A. A tree search algorithm for solving the container loading problem. INFORMS Journal on Computing, 2010, 22(2): 222−235 doi: 10.1287/ijoc.1090.0338 [8] Fekete S P, Schepers J, Van der Veen J C. An exact algorithm for higher-dimensional orthogonal packing. Operations Research, 2007, 55(3): 569−587 doi: 10.1287/opre.1060.0369 [9] Bischoff E E, Ratcliff B S W. Issues in the development of approaches to container loading. Omega, 1995, 23(4): 377−390 doi: 10.1016/0305-0483(95)00015-G [10] Bischoff E E, Janetz F, Ratcliff M S W. Loading pallets with non-identical items. European Journal of Operational Research, 1995, 84(3): 681−692 doi: 10.1016/0377-2217(95)00031-K [11] He K, Huang W Q. An efficient placement heuristic for three-dimensional rectangular packing. Computers and Operations Research, 2011, 38(1): 227−233 [12] Huang W Q, He K. A caving degree approach for the single container loading problem. European Journal of Operational Research, 2009, 196(7): 93−101 [13] He K, Huang W Q. A caving degree based flake arrangement approach for the container loading problem. Computers and Industrial Engineering, 2010, 59(2): 344−351 [14] Lim A, Rodrigues B, Wang Y. A multi-faced buildup algorithm for three-dimensional packing problems. Omega, 2003, 31(6): 471−481 doi: 10.1016/j.omega.2003.08.004 [15] 张德富, 魏丽军, 陈青山, 陈火旺. 三维装箱问题的组合启发式算法. 软件学报, 2007, 18(9): 2083−2089 doi: 10.1360/jos182083Zhang De-Fu, Wei Li-Jun, Chen Qing-Shan, Chen Huo-Wang. A combinational heuristic algorithm for the three dimensional packing problem. Journal of Software, 2007, 18(9): 2083−2089 doi: 10.1360/jos182083 [16] Gehring H, Bortfeldt A. A genetic algorithm for solving the container loading problem. International Transactions in Operational Research, 1997, 4(5–6): 401−418 doi: 10.1111/j.1475-3995.1997.tb00095.x [17] Bortfeldt A, Gehring H. A hybrid genetic algorithm for the container loading problem. European Journal of Operational Research, 2001, 131(1): 143−161 doi: 10.1016/S0377-2217(00)00055-2 [18] Sixt M. Dreidimensionale Packprobleme. Losungsverfahren Basierend auf den Meta-Heuristiken Simulated Annealing und Tabu-Suche. Frankfurt am Main: Europaischer Verlag der Wissenschaften, 1996. [19] Bortfeldt A, Gehring H, Mack D. A parallel tabu search algorithm for solving the container loading problem. Parallel Computing, 2003, 29(5): 641−662 doi: 10.1016/S0167-8191(03)00047-4 [20] Mack D, Bortfeldt A, Gehring H. A parallel hybrid local search algorithm for the container loading problem. International Transactions in Operational Research, 2004, 11(5): 511−533 doi: 10.1111/j.1475-3995.2004.00474.x [21] 张德富, 彭煜, 朱文兴, 陈火旺. 求解三维装箱问题的混合模拟退火算法. 计算机学报, 2009, 32(11): 2147−2156Zhang De-Fu, Peng Yu, Zhu Wen-Xing, Chen Huo-Wang. A hybrid simulated annealing algorithm for the three-dimensional packing problem. Chinese Journal of Computers, 2009, 32(11): 2147−2156 [22] Bischoff E E. Three-dimensional packing of items with limited load bearing strength. European Journal of Operational Research, 2006, 168(3): 952−966 doi: 10.1016/j.ejor.2004.04.037 [23] Moura A, Oliveira J F. A GRASP approach to the container-loading problem. IEEE Intelligent Systems, 2005, 20(4): 50−57 doi: 10.1109/MIS.2005.57 [24] Parreno F, Alvarez-Valdes R, Oliveira J F, Tamarit J M. A maximal-space algorithm for the container loading problem. INFORMS Journal on Computing, 2007, 20(3): 412−422 [25] Morabito R, Arenales M. An AND/OR-graph approach to the container loading problem. International Transactions in Operational Research, 1994, 1(1): 59−73 [26] Terno J, Scheithauer G, Sommerweiß U, Riehme J. An efficient approach for the multi-pallet loading problem. European Journal of Operational Research, 2000, 123(2): 372−381 doi: 10.1016/S0377-2217(99)00263-5 [27] Eley M. Solving container loading problems by block arrangement. European Journal of Operational Research, 2002, 141(2): 393−409 doi: 10.1016/S0377-2217(02)00133-9 [28] Hifi, M. Approximate algorithms for the container loading problem. International Transactions in Operational Research, 2002, 9(6): 747−774 doi: 10.1111/1475-3995.00386 [29] Pisinger D. Heuristics for the container loading problem. European Journal of Operational Research, 2002, 141(2): 143−153 [30] Lim A, Ma H, Xu J, Zhang X W. An iterated construction approach with dynamic prioritization for solving the container loading problems. Expert Systems with Applications, 2012, 39(4): 4292−4305 doi: 10.1016/j.eswa.2011.09.103 [31] 张德富, 彭煜, 张丽丽. 求解三维装箱问题的多层启发式搜索算法. 计算机学报, 2012, 35(12): 2553−2561 doi: 10.3724/SP.J.1016.2012.02553Zhang De-Fu, Peng Yu, Zhang Li-Li. A multi-layer heuristic search algorithm three dimensional container loading problem. Chinese Journal of Computers, 2012, 35(12): 2553−2561 doi: 10.3724/SP.J.1016.2012.02553 [32] Liu S, Tan W, Xu Z Y, Liu X W. A tree search algorithm for the container loading problem. Computers and Industrial Engineering, 2014, 75: 20−30 [33] 刘胜, 朱凤华, 吕宜生, 李元涛. 求解三维装箱问题的启发式正交二叉树搜索算法. 计算机学报, 2015, 38(8): 1530−1543 doi: 10.11897/SP.J.1016.2015.01530Liu Sheng, Zhu Feng-Hua, Lv Yi-Sheng, Li Yuan-Tao. A heuristic orthogonal binary tree search algorithm for three dimensional container loading problem. Chinese Journal of Computers, 2015, 38(8): 1530−1543 doi: 10.11897/SP.J.1016.2015.01530 [34] Ren J D, Tian Y J, Sawaragi T. A tree search method for the container loading problem with shipment priority. European Journal of Operational Research, 2011, 214(3): 526−535 doi: 10.1016/j.ejor.2011.04.025 [35] Wang N, Lim A, Zhu W B. A multi-round partial beam search approach for the single container loading problem with shipment priority. International Journal of Production Economics, 2013, 145(2): 531−540 doi: 10.1016/j.ijpe.2013.04.028 [36] Lim A, Ma H, Qiu C Y, Zhu W B. The single container loading problem with axle weight constraints. International Journal of Production Economics, 2013, 144(1): 358−369 doi: 10.1016/j.ijpe.2013.03.001 [37] Liu S, Shang X Q, Cheng C J, Zhao H X, Wang F-Y. Heuristic algorithm for the container loading problem with multiple constraints. Computers and Industrial Engineering, 2017, 108: 149−164 [38] Wang L, Lu J W. A memetic algorithm with competition for the capacitated green vehicle routing problem. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 516−526 [39] Shang X Q, Shen D Y, Wang F-Y, Nyberg T R. A heuristic algorithm for the fabric spreading and cutting problem in apparel factories. IEEE/CAA Journal of Automatica Sinica, 2019, 6(4): 961−968 [40] Luo C, Shen Z, Evangelou S, Xiong G, Wang F-Y. The combination of two control strategies for series hybrid electric vehicles. IEEE/CAA Journal of Automatica Sinica, 2019, 6(2): 596−608 [41] Shen Z, Shang X Q, Dong X S, Xiong G, Wang F-Y. A learning based framework for error compensation in 3D printing. IEEE Transactions on Cybernetics, 2019, 49(11): 4042−4050 -

 下载:
下载:


图(6) / 表(2)
计量
- 文章访问数: 2734
- HTML全文浏览量: 843
- PDF下载量: 275
- 被引次数: 0
