

A Robot Scene Recognition Method Based on Improved Autonomous Developmental Network
-
摘要:
场景识别是移动机器人在陌生动态环境中完成任务的前提. 考虑到现有方法的不足, 本文提出了一种基于改进型自主发育网络的场景识别方法, 它通过引入基于多优胜神经元的Top-k竞争机制、基于负向学习的权值更新、基于连续性样本的加强型学习等步骤实现对场景的快速识别, 并使该方法具有更好的适应能力. 对于这种基于改进型自主发育网络的场景识别方法, 通过实验进行了对比测试. 结果表明, 这种改进型自主发育神经网络节点利用率高, 场景识别准确可靠, 可以较好地满足机器人作业的实际需求.
-
关键词:
- 机器人 /
- 场景识别 /
- 改进型自主发育神经网络
Abstract:Scene recognition is a prerequisite for mobile robots to complete tasks in unfamiliar dynamic environments. Considering the drawbacks of existing methods, this paper proposes a scene recognition method based on improved autonomous developmental network, which introduces important steps, such as Top-k competition mechanism based on multi-winning neurons, weight update based on negative learning, and reinforcement learning with continuous sample images, into the basic algorithm, so as to efficiently achieve scene recognition tasks with good adaptability to various environment. To test the performance of the scene recognition method based on improved autonomous developmental network, numerous comparative experiments are implemented, with the obtained results showing that the improved autonomous developmental neural network model presents such advantages as high node utilization rate, reliable scene recognition results, and it thus better meets the practical needs of robot operations.
-
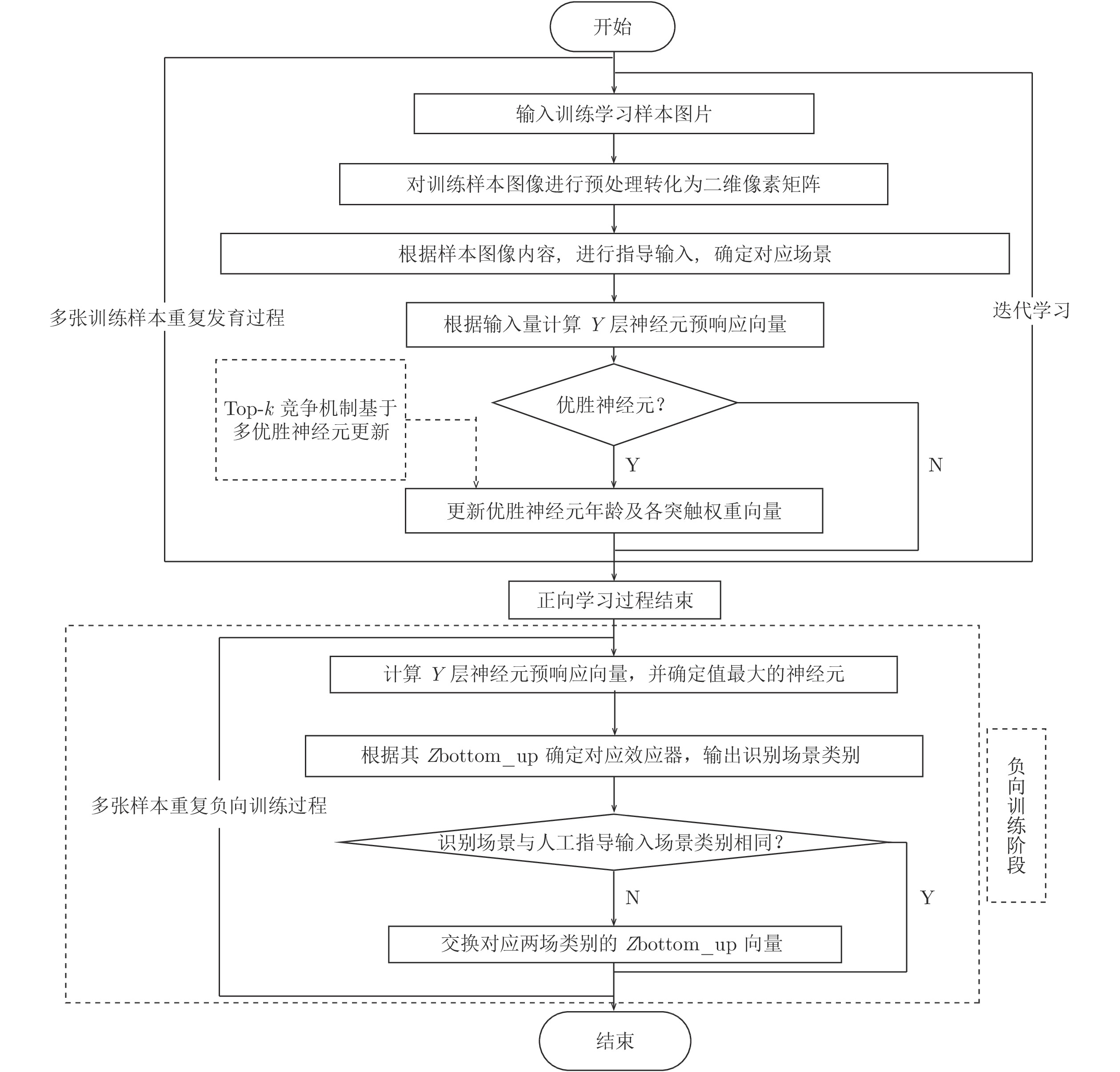
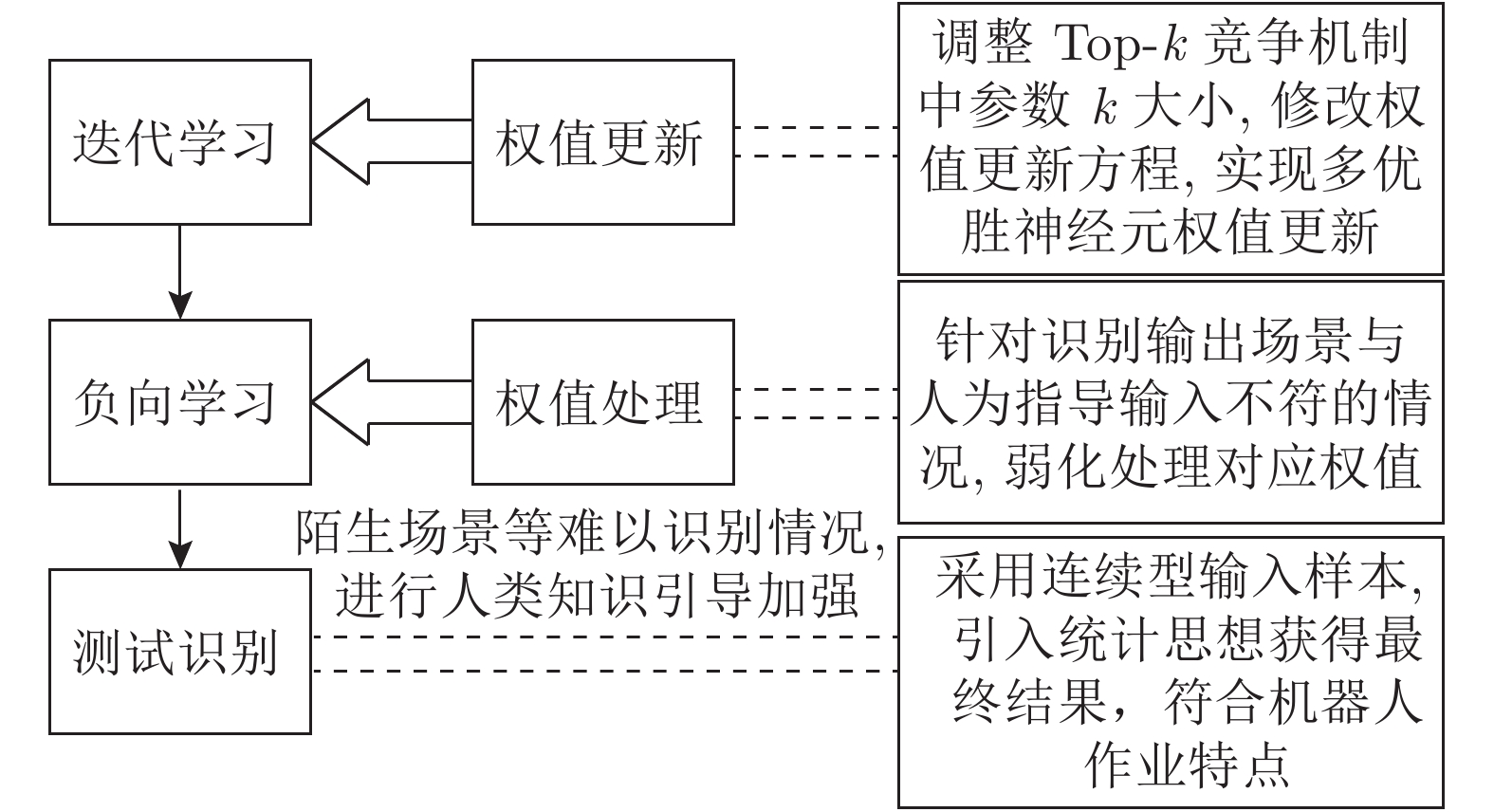
图 3 改进型发育网络进行场景识别的算法流程
Fig. 3 Algorithm flow for scene recognition in improved developmental network
表 1 不同室内场景类别识别准确率
Table 1 Classification accuracy of different indoor scenes
不同室内场景类别 实验室 教室 会议室 识别准确率 92.4% 83.23% 87.07%  下载: 导出CSV
下载: 导出CSV
-
[1] 刘畅. 一种机器人室内场景图像识别方法. 量子电子学报, 2017, 34(3): 293−304Liu Chang. A robot indoor scene image recognition method. Chinese Journal of Quantum Electronics, 2017, 34(3): 293−304 [2] 牛杰, 卜雄洙, 钱堃, 李众. 一种融合全局及显著性区域特征的室内场景识别方法. 机器人, 2015, 37(1): 122−128Niu Jie, Bu Xiong-Zhu, Qian Kun, Li Zhong. An indoor scene recognition method combining global and saliency region features. Robot, 2015, 37(1): 122−128 [3] 严晗, 刘佶鑫, 龚建荣. 典型室内场景显著性稀疏识别. 南京师大学报(自然科学版), 2017, 40(1): 79−85Yan Han, Liu Ji-Xin, Gong Jian-Rong. Significant spare representation of typical indoor scene recognition. Journal of Nanjing Normal University (Natural Science Edition), 2017, 40(1): 79−85 [4] Luo R C, Ee V W S, Hsieh C K. 3D point cloud based indoor mobile robot in 6-DoF pose localization using fast scene recognition and alignment approach. In: Proceedings of the 2016 IEEE Intemational Conference on Multisensor Fusion and Integration for Intelligent Systems. Kongresshaus Baden-Baden, Germany: IEEE, 2016. 470−475 [5] Li F F, Perona P. A bayesian hierarchical model for learning natural scene categories. In: Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, USA: IEEE, 2005. 524−531 [6] Weng J Y, McClelland J, Pentland A, Spornse O, Stockman I, Sur M, et al. Autonomous mental development by robots and animals. Science, 2001, 291(5504): 599−600 doi: 10.1126/science.291.5504.599 [7] Weng J Y. Three theorems: Brain-like networks logically reason and optimally generalize. In: Proceedings of the 2011 IEEE International Joint Conference on Neural Networks. San Jose, California, USA: IEEE, 2011. 2983−2990 [8] 王作为, 张汝波. 自主发育智能机器人体系结构研究. 计算机应用与软件, 2011, 28(11): 37−40Wang Zuo-Wei, Zhang Ru-Bo. Research on the architecture of autonomous developmental robot. Computer Applications and Software, 2011, 28(11): 37−40 [9] 陈祥章, 殷智浩, 蔡则苏. 自主环境认知的发育机器人发育模型. 解放军理工大学学报(自然科学版), 2013, 14(5): 507−510Chen Xiang-Zhang, Yin Zhi-Hao, Cai Ze-Su. Development model of autonomous developing robots with independent environmental cognition. Journal of PLA University of Science and Technology (Natural Science Edition), 2013, 14(5): 507−510 [10] 陈洋, 张道辉, 赵新刚, 韩建达. 基于IHDR自主学习框架的无人机3维路径规划. 机器人, 2012, 34(5): 513−518 doi: 10.3724/SP.J.1218.2012.00513Chen Yang, Zhang Dao-Hui, Zhao Xin-Gang, Han Jian-Da. UAV 3D path planning based on IHDR autonomous-learning-framework. Robot, 2012, 34(5): 513−518 doi: 10.3724/SP.J.1218.2012.00513 [11] 钱夔, 宋爱国, 章华涛, 张立云. 基于自主发育神经网络的机器人室内场景识别. 机器人, 2013, 35(6): 703−709 doi: 10.3724/SP.J.1218.2013.00703Qian Kui, Song Ai-Guo, Zhang Hua-Tao, Zhang Li-Yun. Robot indoor scenes recognition based on autonomous developmental neural network. Robot, 2013, 35(6): 703−709 doi: 10.3724/SP.J.1218.2013.00703 [12] 钱夔, 宋爱国, 章华涛, 张立云. 基于单胺类神经递质调节发育算法的机器人视觉定位. 机器人, 2014, 36(3): 362−368Qian Kui, Song Ai-Guo, Zhang Hua-Tao, Zhang Li-Yun. Robot vision location based on developmental algorithm of monoamine neurotransmitters modulation. Robot, 2014, 36(3): 362−368 [13] 王东署, 谭达佩, 韦晓琴. 基于发育网络的人脸朝向识别研究. 郑州大学学报(工学版), 2017, 38(5): 23−27Wang Dong-Shu, Tan Da-Pei, Wei Xiao-Qin. Face orientation recognition based on development network. Journal of Zhengzhou University (Engineering Science), 2017, 38(5): 23−27 [14] Castro-Garcia J L, Weng J. Emergent multilingual language acquisition using developmental networks. In: Proceedings of the 2019 IEEE International Joint Conference on Neural Networks. Budapest, Hungary: IEEE, 2019. 1−8 [15] Zheng Z, Wu X, Weng J. Emergent neural turing machine and its visual navigation. Neural Networks, 2019, 110(2019): 116−130 -

 下载:
下载:




计量
- 文章访问数: 1830
- HTML全文浏览量: 441
- PDF下载量: 276
- 被引次数: 0
