

Model Predict Control Method Based on Higher-order Observer and Disturbance Compensation Control
-
摘要: 针对状态不可测、外部干扰未知, 并且状态和输入受限的离散时间线性系统, 将高阶观测器、干扰补偿控制与标准模型预测控制(Model predictive control, MPC)相结合, 提出了一种新的MPC方法. 首先利用高阶观测器同步观测未知状态和干扰, 使得观测误差一致有界收敛;然后基于该干扰估计值设计新的干扰补偿控制方法, 并将该方法与基于状态估计的标准MPC相结合, 实现上述系统的优化控制. 所提出的MPC方法克服了利用现有MPC方法求解具有外部干扰和状态约束的优化控制问题时存在无可行解的局限, 能够保证系统状态在每一时刻都满足约束条件, 并且使系统的输出响应接近采用标准MPC方法控制线性标称系统时得到的输出响应. 最后, 将所提控制方法应用到船舶航向控制系统中, 仿真结果表明了所提方法的有效性和优越性.Abstract: By combining a higher-order observer with disturbance compensation control and standard model predictive control (MPC), a novel MPC method is proposed for a discrete-time linear system with unmeasurable states, unknown external disturbances and constraints of states and inputs. Firstly, a higher-order observer is used to simultaneously observe unknown states and disturbances, such that the observation errors are uniformly bounded. Then a new disturbance compensation control method is designed based on the disturbance estimation, and the proposed method is obtained by combining the disturbance compensation control with the standard MPC based on the state estimation. The proposed method overcomes the limitation that there is no feasible solution when using the existing MPC methods to solve the optimization control problem with external disturbances and state constraints, which can also assure the system states satisfying their constraint conditions at each time instant, and make the output responses of the system close to those of the linear nominal system controlled by the standard MPC method. Finally, the proposed control method is applied to a ship heading control system, and the simulation results show its effectiveness and superiority.
-
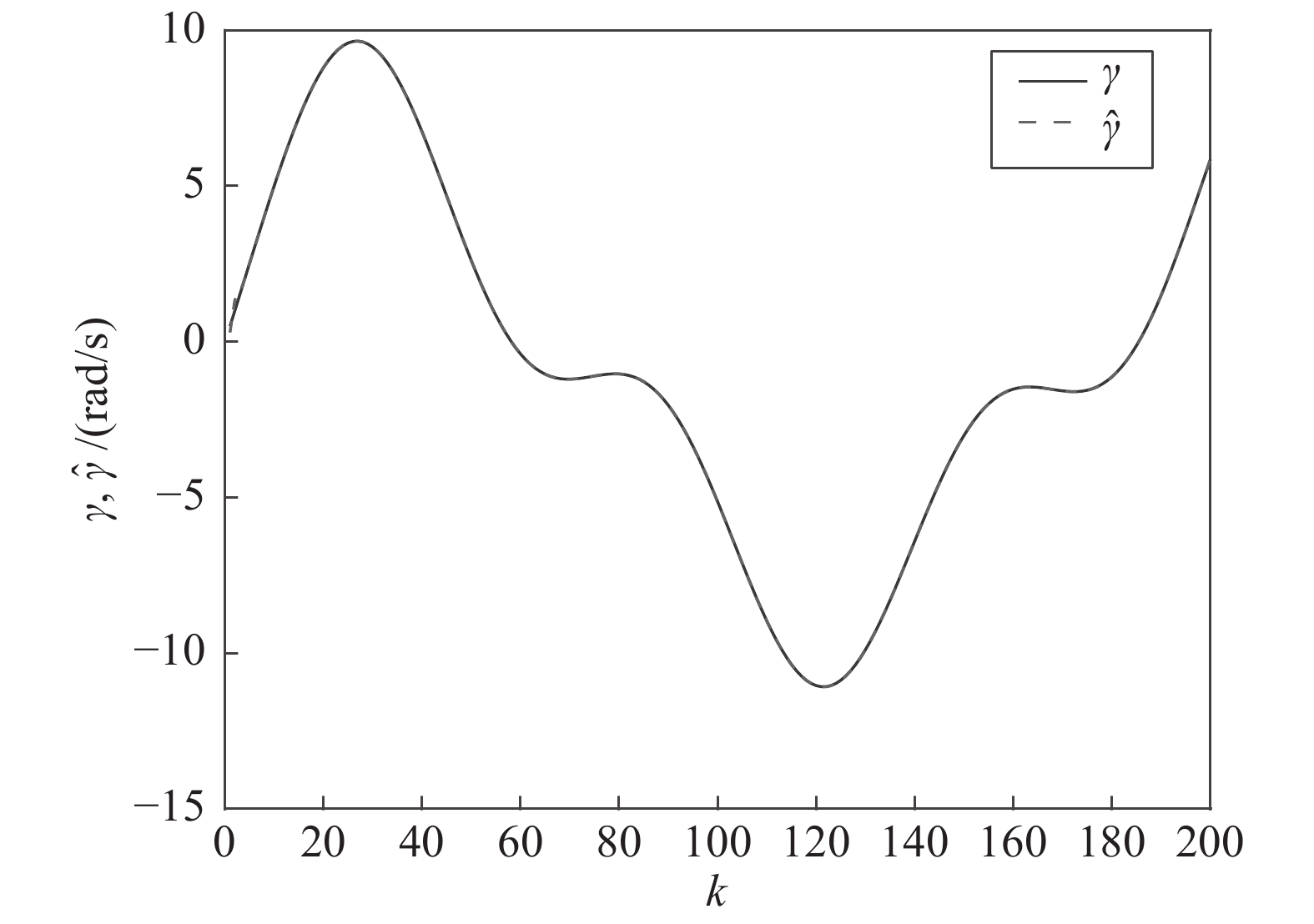
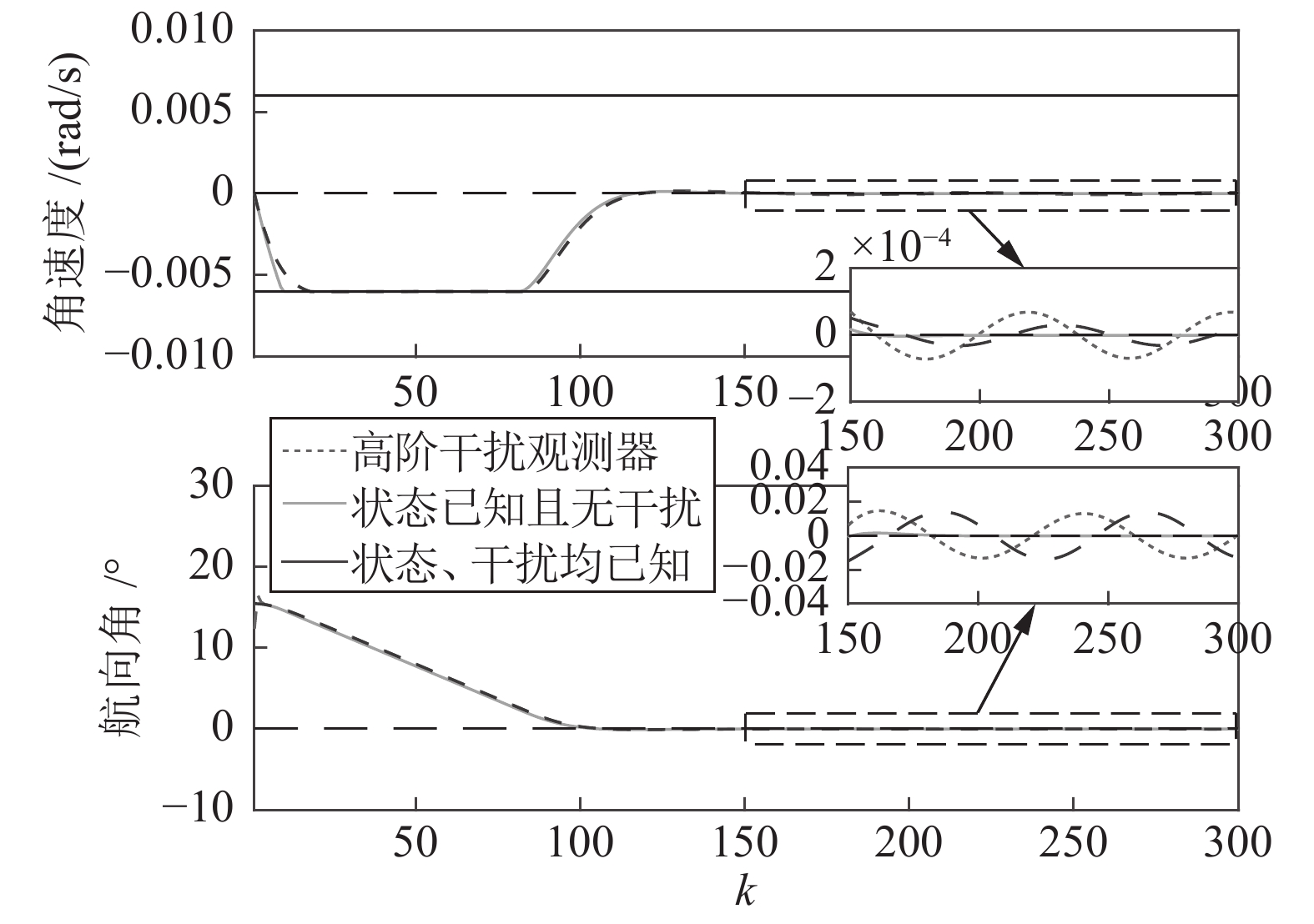
图 1 角速度
$\gamma$ 及高阶观测器观测的结果Fig. 1 Yaw velocity
$\gamma$ and the observed result of higher-order observer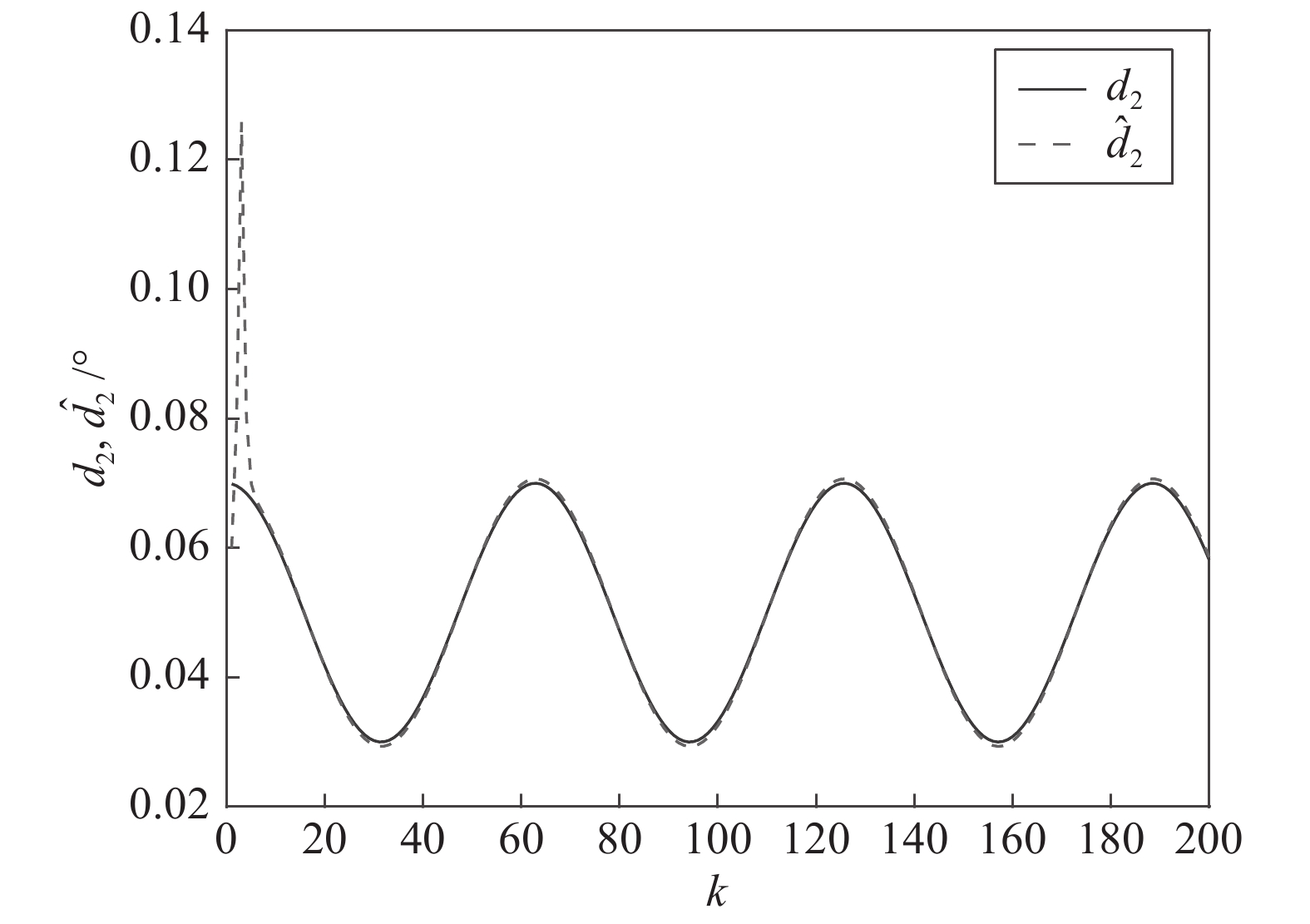
图 4 干扰
$d_{2}$ 及高阶观测器观测的结果Fig. 4 Disturbance
$d_{2}$ and observed result of higher-order observer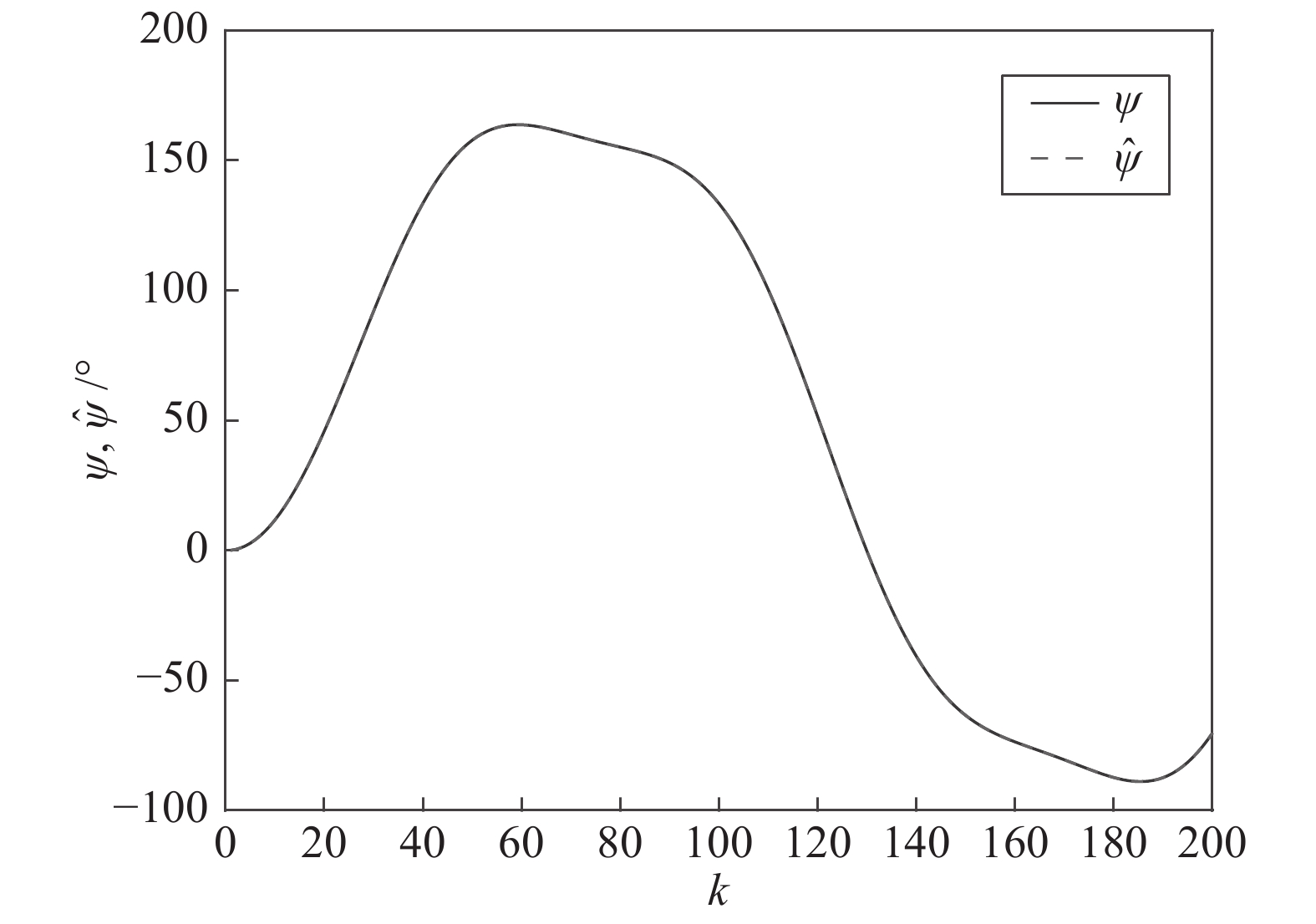
图 2 航向角
$\psi$ 及高阶观测器观测的结果Fig. 2 Heading angle
$\psi$ and the observed result of higher-order observer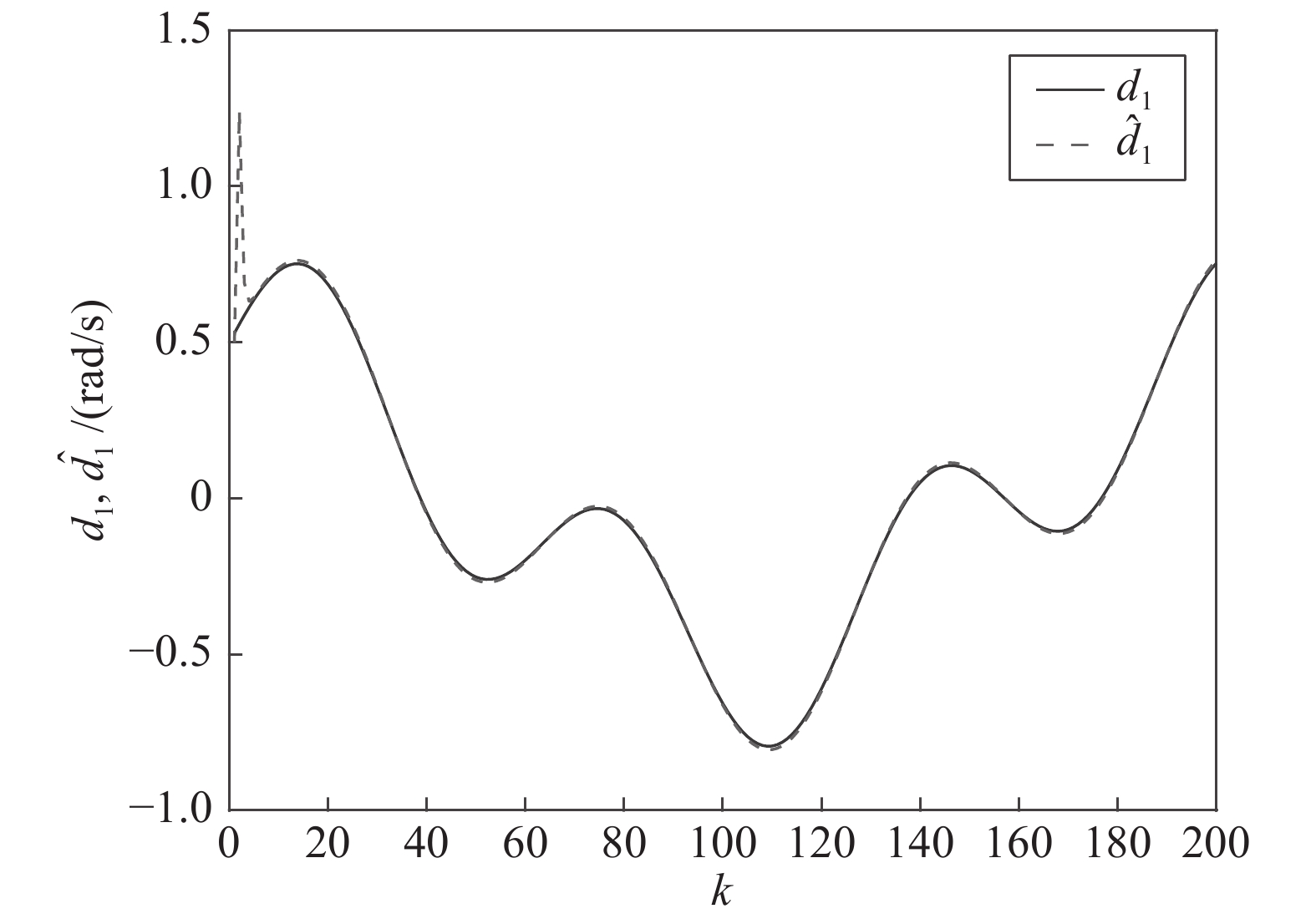
图 3 干扰
$ d_{1}$ 及高阶观测器观测的结果Fig. 3 Disturbance
$ d_{1}$ and observed result of higher-order observer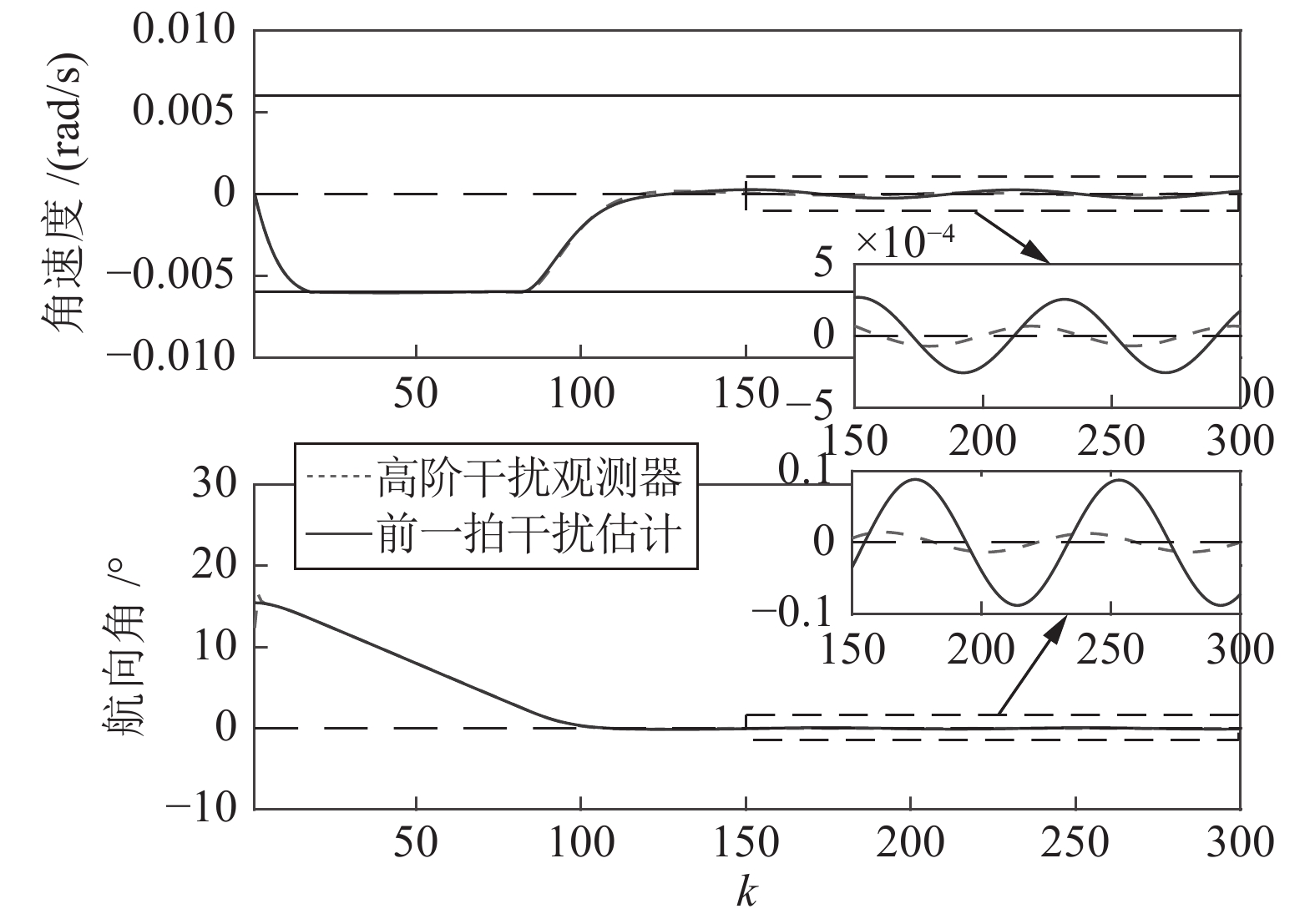
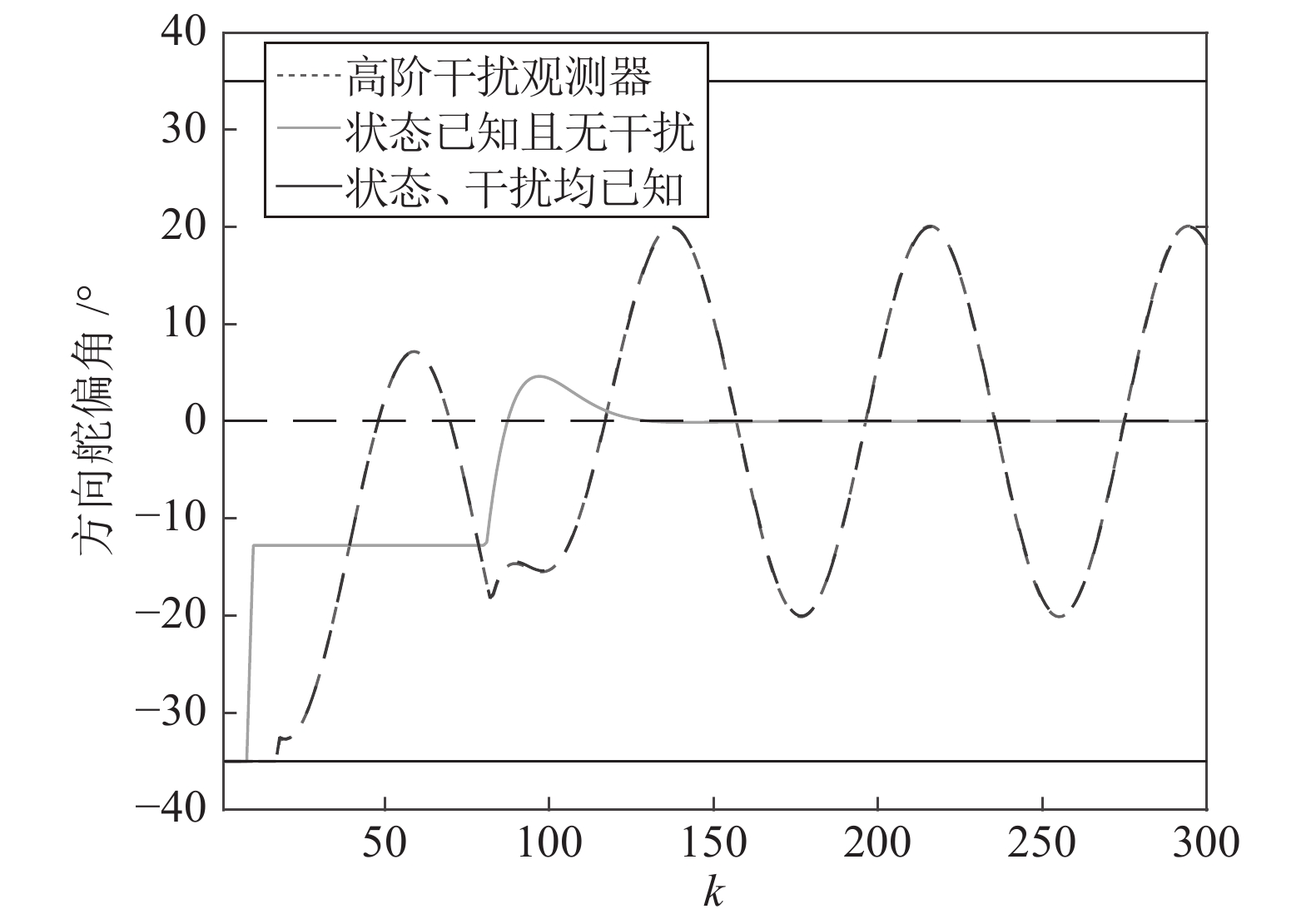
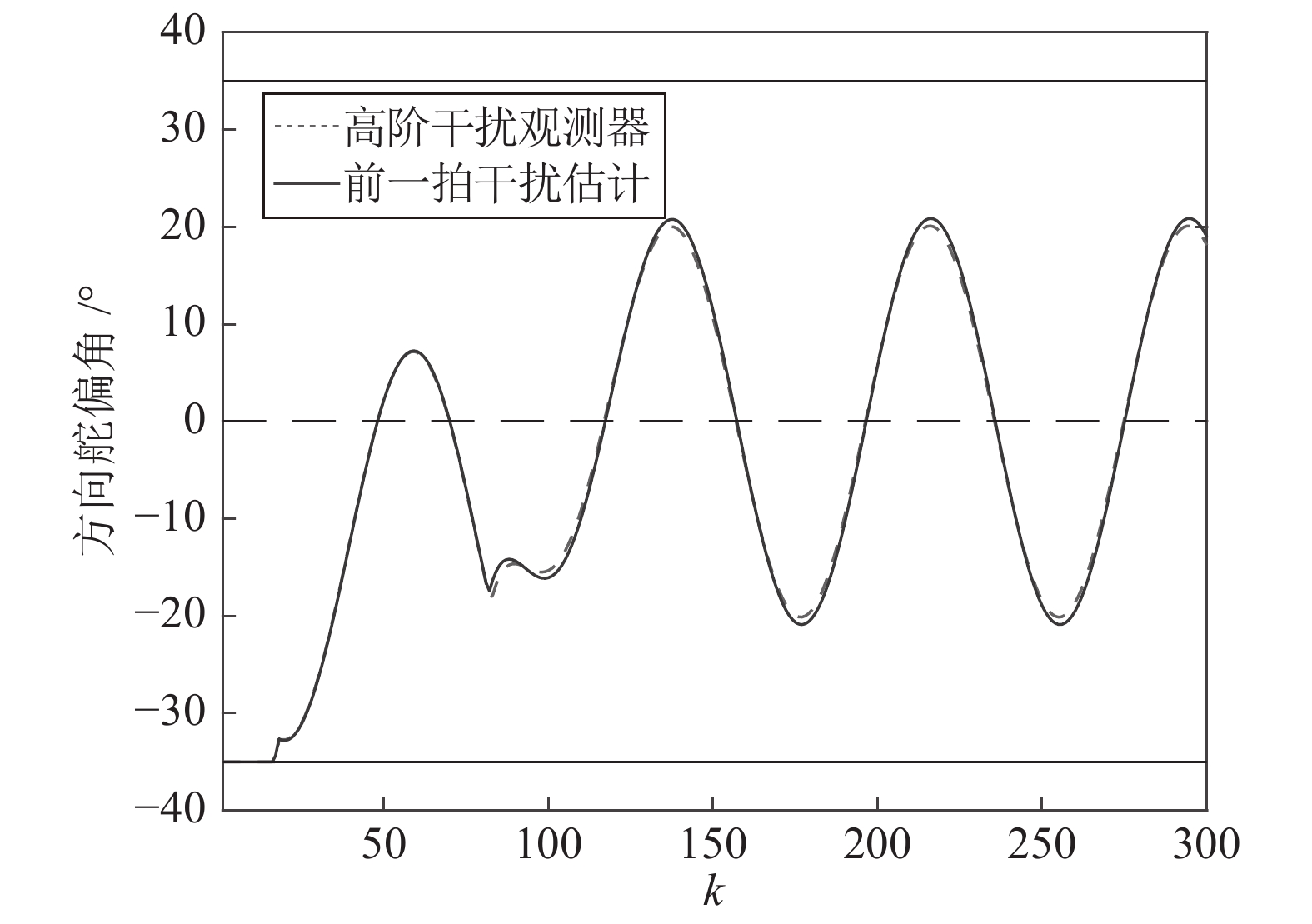
图 7 两种观测方法下系统的输出响应曲线
Fig. 7 Output response curves of the system under two observation methods
-
[1] Qin S J, Badgwell T A. A survey of industrial model predictive control technology. Control Engineering Practice, 2003, 11(7): 733−764 doi: 10.1016/S0967-0661(02)00186-7 [2] 陈虹. 模型预测控制. 北京: 科学出版社, 2013, 1–12Chen Hong. Model Predictive Control. Beijing: Science Press, 2013. 1–12 [3] Kouro S, Cortes P, Vargas R, Ammann U, Rodriguez J. Model predictive control — a simple and powerful method to control power converters. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1826−1838 doi: 10.1109/TIE.2008.2008349 [4] 席裕庚, 李德伟, 林姝. 模型预测控制 — 现状与挑战. 自动化学报, 2013, 39(3): 222−236Xi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control — status and challenges. Acta Automatica Sinica, 2013, 39(3): 222−236 [5] Mayne D Q, Seron M M, Rakovic S V. Robust model predictive control of constrained linear systems with bounded disturbances. Automatica, 2005, 41(2): 245−250 [6] 牛宏, 张向帅, 张思远. 连续搅拌釜的非线性模型预测控制方法. 控制工程, 2017, 24(4): 752−755Niu Hong, Zhang Xiang-Shuai, Zhang Si-Yuan. Nonlinear model predictive control method for continuous stirred tank reactor. Control Engineering, 2017, 24(4): 752−755 [7] Zeilinger M N, Raimondo D M, Domahidi A, Morari M, Jones C N. On real-time robust model predictive control. Automatica, 2014, 50(3): 683−694 doi: 10.1016/j.automatica.2013.11.019 [8] Huang H, Li D W, Xi Y G. The improved robust model predictive control with mixed H2/H∞ control approach. Acta Automatica Sinica, 2012, 38(6): 944−949 [9] Villanueva M E, Quirynen R, Diehl M, Chachuat B, Houska B. Robust MPC via min-max differential inequalities. Automatica, 2017, 77: 311−321 doi: 10.1016/j.automatica.2016.11.022 [10] Li Z, Sun J. Disturbance compensating model predictive control with application to ship heading control. IEEE Transactions on Control Systems Technology, 2012, 20(1): 257−265 [11] Chen W H, Yang J, Guo L, Li S H. Disturbance-observe-based control and related methods — an overview. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1083−1095 doi: 10.1109/TIE.2015.2478397 [12] Kim S K, Park C R, Yoon T W, Lee Y II. Disturbance-observer-based model predictive control for output voltage regulation of three-phase inverter for unint-erruptible-power-supply applications. European Journal of Control, 2015, 23(3): 71−83 [13] Purnawan H, Asfihani T, Adzkiya D, Subchan. Disturbance compensating model predictive control for warship heading control in missile firing mission. Journal of Physics: Conference Series, 2018, 1108(1): 1−6 [14] Liang L H, Wen Y. Integrated rudder/fin control with disturbance compensation distributed model predictive control. IEEE Access, 2018, 44: 72925−72938 [15] Wu C, Yang Y, Li S H, Li Q, Guo L. Disturbance observer based model predictive control for accurate atmospheric entry of spacecraft. Advances in Space Research, 2018, 61(9): 2457−2471 doi: 10.1016/j.asr.2018.02.010 [16] Zhang F, Zhang Y, Wu X, Shen J, Lee K Y. Control of ultra-supercritical once-through boiler-turbine unit using MPC and ESO approaches. In: Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA). Mauna Lani, USA: IEEE, 2017. 994–999 [17] Zhang F, Wu X, Shen J. Extended state observer based fuzzy model predictive control for ultra-supercritical boiler-turbine unit. Applied Thermal Engineering, 2017, 118: 90−100 doi: 10.1016/j.applthermaleng.2017.01.111 [18] Li W H, Sun Y Q, Chen H Q, Wang G. Model predictive controller design for ship dynamic positioning system based on state-space equations. Journal of Marine Science and Technology, 2016, 22(3): 426−431 [19] Simkoff J M, Wang S Y, Baldea M, Chiang L H, Castillo I, Bindlish R, Stanley D B. Plant-model mismatch evaluation for unconstrained MPC with state estimation. In: Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC). Melbourne, Australia: IEEE, 2017. 6177–6188 [20] Simkoff J M, Wang S Y, Baldea M, Chiang L H, Castillo I, Bindlish R, Stanley D B. Plant-model mismatch estimation in unconstrained state-space MPC. In: Proceedings of the 2017 American Control Conference (ACC). Seattle, USA: IEEE, 2017. 3078–3083 [21] Ohhira T, Shimada A. Movement control based on model predictive control with disturbance suppression using kalman filter including disturbance estimation. IEEJ Journal of Industry Applications, 2018, 7(5): 387−395 doi: 10.1541/ieejjia.7.387 [22] Scokaert P O M, Rawlings J B. Feasibility issues in linear model predictive control. Aiche Journal, 2010, 8(45): 1649−1659 [23] Gautam A, Soh Y C. Soft-constrained model predictive control based on off-line-computed feasible sets. In: Proceedings of the 52nd IEEE Conference on Decision and Control. Florence, Italy: IEEE, 2013. 5777–5782 [24] Zeilinger M N, Morari M, Jones C N. Soft constrained model predictive control with robust stability guarantees. IEEE Transactions on Automatic Control, 2014, 59(5): 1190−1202 doi: 10.1109/TAC.2014.2304371 [25] Abidi K, Xu J X. Advanced Discrete-Time Control Designs and Applications: Discrete-Time Sliding Mode Control. Singapur-Verlag: Springer, 2015. [26] Chang J L. Applying discrete-time proportional integral observers for state and disturbance estimations. IEEE Transactions on Automatic Control, 2006, 51(5): 814−818 doi: 10.1109/TAC.2006.875019 [27] Goodwin G C, Ramadge P J, Caines P E. Discrete-time multivariable adaptive control. IEEE Transactions on Automatic Control, 1980, 25(3): 449−456 doi: 10.1109/TAC.1980.1102363 -



 下载:
下载:






计量
- 文章访问数: 1989
- HTML全文浏览量: 150
- PDF下载量: 494
- 被引次数: 0
