

Event-triggered Adaptive Neural Network Control for a Class of Stochastic Nonlinear Systems
-
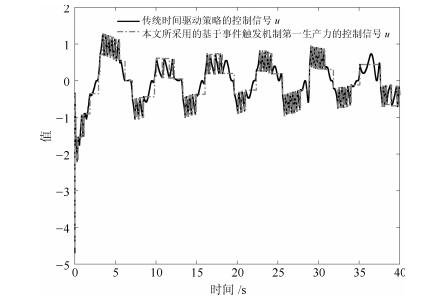
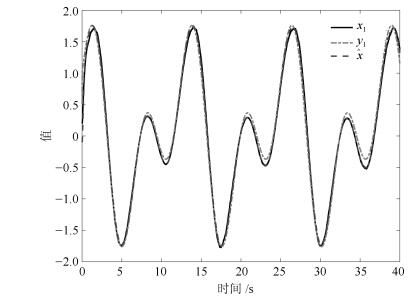
摘要: 针对一类具有严格反馈结构且控制方向未知的随机非线性系统,提出了基于事件触发机制的自适应神经网络(Adaptive neural network,ANN)输出反馈控制方法.利用径向基神经网络逼近系统中未知的非线性函数.通过引入Nussbaum增益函数并设计滤波器,解决了系统控制方向未知的问题.通过设计具有相对阈值的事件触发机制,保证了闭环随机非线性系统的有界性.最后给出数值仿真例子验证所提控制方法的有效性.Abstract: This paper investigates the event-triggered adaptive output-feedback control problem for a class of strict-feedback stochastic nonlinear systems, and a novel event-triggered adaptive neural network output-feedback control strategy is proposed. The radial basis function neural networks are utilized to approximate the unknown nonlinear functions. By introducing Nussbaum gain function and designing filter during the backstepping design procedure, the effect of unknown control direction is compensated. The boundness of the closed-loop stochastic nonlinear system is guaranteed by designing a relative threshold event-triggered mechanism. Finally, a numerical example is given to show the effectiveness of the proposed control strategy.1) 本文责任编委 鲁仁全
-
[1] Polycarpou M M, Mears M J. Stable adaptive tracking of uncertain systems using nonlinearly parametrized on-line approximators. International Journal of Control, 1998, 70(3):363-384 doi: 10.1080/002071798222280 [2] Krstic M, Kanellakopoulos I, Kokotovic P V. Adaptive nonlinear control without overparametrization. Systems & Control Letters, 1992, 19(3):177-185 http://d.old.wanfangdata.com.cn/Periodical/kzyjc200004006 [3] Kanellakopoulos I, Kokotovic P V, Morse A S. Systematic design of adaptive controller for feedback linearizable systems. IEEE Transactions on Automatic Control, 1991, 36:1241-1253 doi: 10.1109/9.100933 [4] Krstic M, Kanellakopoulos I, Kokotovic P. Nonlinear and Adaptive Control Design. New York:Wiley, 1995 [5] Zhang Y, Peng P Y, Jiang Z P. Stable neural controller design for unknown nonlinear systems using backstepping. IEEE Transactions on Neural Networks, 2000, 11(6):1347-1360 doi: 10.1109/72.883443 [6] Chen B, Liu X, Liu K, Lin C. Novel adaptive neural control design for nonlinear MIMO time-delay systems. Automatica, 2009, 45(6):1554-1560 doi: 10.1016/j.automatica.2009.02.021 [7] Li T S, Wang D, Feng G, Tong S C. A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(3):915-927 doi: 10.1109/TSMCB.2009.2033563 [8] Wang M, Liu X, Shi P. Adaptive neural control of pure-feedback nonlinear time-delay systems via dynamic surface technique. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2011, 41(6):1681-1692 doi: 10.1109/TSMCB.2011.2159111 [9] Sun W, Gao H, Kaynak O. Adaptive backstepping control for active suspension systems with hard constraints. IEEE/ASME Transactions on Mechatronics, 2013, 18(3):1072-1079 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c789a5e2dce51b1b01a17ffeba1e3319 [10] Deng H, Krstic M. Output-feedback stochastic nonlinear stabilization. IEEE Transactions on Automatic Control, 1999, 44(2):328-333 doi: 10.1109/9.746260 [11] Liu S J, Zhang J F, Jiang Z P. Decentralized adaptive output-feedback stabilization for large-scale stochastic nonlinear systems. Automatica, 2007, 43(2):238-251 doi: 10.1016/j.automatica.2006.08.028 [12] Wu Z J, Xie X J, Zhang S Y. Adaptive backstepping controller design using stochastic small-gain theorem. Automatica, 2007, 43(4):608-620 doi: 10.1016/j.automatica.2006.10.020 [13] Chen W, Jiao L, Li J, Li R. Adaptive NN backstepping output-feedback control for stochastic nonlinear strict-feedback systems with time-varying delays. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2010, 40(3):939-950 doi: 10.1109/TSMCB.2009.2033808 [14] Li J, Chen W, Li J M. Adaptive NN output-feedback decentralized stabilization for a class of large-scale stochastic nonlinear strict-feedback systems. International Journal of Robust and Nonlinear Control, 2011, 21(4):452-472 doi: 10.1002/rnc.v21.4 [15] Tallapragada P, Chopra N. On event triggered tracking for nonlinear systems. IEEE Transactions on Automatic Control, 2013, 58(9):2343-2348 doi: 10.1109/TAC.2013.2251794 [16] Liu T, Jiang Z P. A small-gain approach to robust event-triggered control of nonlinear systems. IEEE Transactions on Automatic Control, 2015, 60(8):2072-2085 doi: 10.1109/TAC.2015.2396645 [17] Abdelrahim M, Postoyan R, Daafouz J, Dragan Nesic. Stabilization of nonlinear systems using event-triggered output feedback controllers. IEEE Transactions on Automatic Control, 2016, 61(9):2682-2687 doi: 10.1109/TAC.2015.2502145 [18] Li H, Chen Z, Wu L, Lam H K. Event-triggered control for nonlinear systems under unreliable communication links. IEEE Transactions on Fuzzy Systems, 2017, 25(4):813-824 doi: 10.1109/TFUZZ.2016.2578346 [19] Ding D, Wang Z, Shen B, Wei G. Event-triggered consensus control for discrete-time stochastic multi-agent systems:the input-to-state stability in probability. Automatica, 2015, 62:284-291 doi: 10.1016/j.automatica.2015.09.037 [20] Ma L, Wang Z, Lam H K. Event-triggered mean-square consensus control for time-varying stochastic multi-agent system with sensor saturations. IEEE Transactions on Automatic Control, 2017, 62(7):3524-3531 doi: 10.1109/TAC.2016.2614486 [21] Wu L, Gao Y, Liu J, Li H. Event-triggered sliding mode control of stochastic systems via output feedback. Automatica, 2017, 82:79-92 doi: 10.1016/j.automatica.2017.04.032 [22] Dong H, Wang Z, Shen B, Ding D. Variance-constrained H∞ control for a class of nonlinear stochastic discrete time-varying systems:the event-triggered design. Automatica, 2016, 72:28-36 doi: 10.1016/j.automatica.2016.05.012 [23] Yu Z, Li S. Neural-network-based output-feedback adaptive dynamic surface control for a class of stochastic nonlinear time-delay systems with unknown control directions. Neurocomputing, 2014, 129:540-547 doi: 10.1016/j.neucom.2013.09.005 -

 下载:
下载:

图(2)
计量
- 文章访问数: 4076
- HTML全文浏览量: 719
- PDF下载量: 1267
- 被引次数: 0
