

Classification and Regression Tree Based Traffic Merging for Method Self-driving Vehicles
-
摘要: 决策规划是无人驾驶技术中的重要环节.由于道路结构变化或障碍物引起的车辆被动换道多采用基于逻辑规则或优化算法的决策方式.本文以通行量为优化目标,提出一种基于分类回归树(Classification and regression tree,CART)的汇流决策方法.依据交通流参数,选择大量具有代表性的车辆汇流场景.对场景中车辆的汇流决策序列进行编码,采用遗传算法搜索使得通行量最大的决策方案.将寻优获得的大量汇流决策序列作为样本,训练分类回归树.选取车辆自身信息及与周围车辆的关系等以描述环境特征,运用分类回归树描述环境特征与决策结果的映射关系,获得一种通行量最优的汇流决策方法.在软件中进行仿真实验,对比既有方法,基于分类回归树的汇流方法能够有效减少汇流行为对车流的扰动,在大流量情形下依旧能保持较高的通行效率.此外,该方法对实际实施中可能存在的环境感知误差,如定位误差,有一定的鲁棒性.Abstract: Decision-making and planning are important technologies of unmanned vehicle. Logical rule and optimization algorithm are commonly applied to passive merging strategy for road structure change or obstacles. A traffic merging strategy aiming to improve throughput is proposed in this paper. According to different traffic parameters, a large number of typical traffic merging scenarios are selected. For vehicles in different scenarios, decision sequences are encoded and optimal merging decision is obtained by genetic algorithm based on remainder stochastic sampling with replacement (RSSR). Those optimal decisions are used to train classification and regression tree (CART). Specifically, the environmental feature is described by vehicle state and relationship between other vehicles around. Then the relationship between environmental features and decision is modeled by classification and regression tree. Compared with the previous merging strategy it is shown by simulation that the merging strategy based on CART can effectively mitigate disturbance on traffic flow, brought by merging maneuver, and maintain a high through efficiency even in large flow circumstances. Moreover, this method is also rather robust to environmental perception errors, such as positioning error which may exist in implementation.1) 本文责任编委 张毅
-
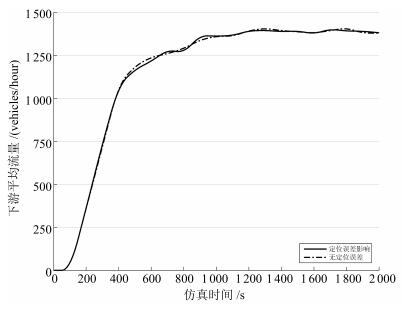
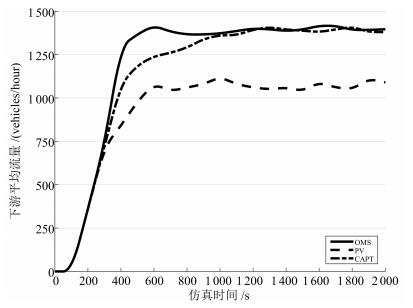
图 9 平均流量1 400 veh/h定位误差对汇流效果影响
Fig. 9 Influence of positioning error on merging efficiency, mean flow 1 400 veh/h
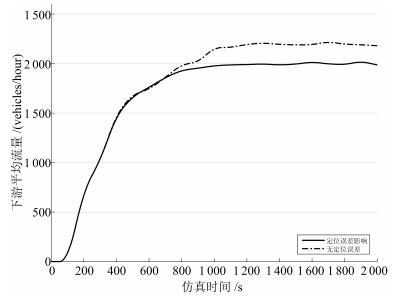
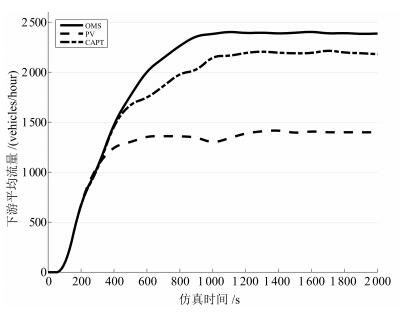
图 10 平均流量2 600 veh/h定位误差对汇流效果影响
Fig. 10 Influence of positioning error on merging efficiency, mean flow 2 600 veh/h
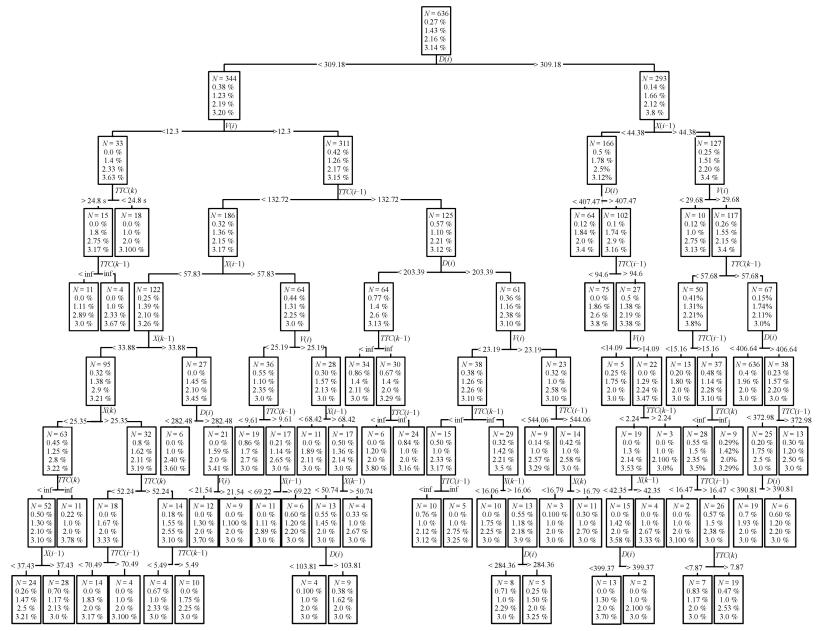
表 1 环境特征变量描述
Table 1 Environment feature description
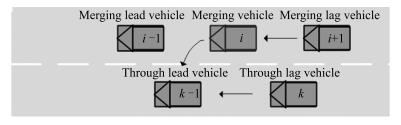
变量(Var) 描述 ${D(i)}$ 汇流车辆距离瓶颈点的距离 ${V(i)}$ 汇流车辆车速 ${X(i-1)}$ 汇流车辆与本车道中前车的纵向距离 ${TTC(i-1)}$ 汇流车辆与本车道中前车的预估碰撞时间 ${X(k-1)}$ 汇流车辆与汇入车道中前车的纵向距离 ${TTC(k-1)}$ 汇流车辆与汇入车道中前车的预估碰撞时间 ${X(k)}$ 汇入车道中后车与汇流车辆的纵向距离 ${TTC(k)}$ 汇入车道中后车与汇流车辆的预估碰撞时间  下载: 导出CSV
下载: 导出CSV
表 2 平均等待时间比较
Table 2 Mean waiting time comparison
汇流方案 到达过程 平均流量 最长等待时间 平均等待时间 (veh/h) (s) (s) CART Poisson 1 200 0 0 CART Poisson 1 800 0 0 CART Poisson 2 400 1.1 0.02 CART Constant 1 800 0 0 CART Constant 2 400 1.4 0.021 PV Poisson 1 200 88.3 20.5 PV Poisson 1 800 203.2 119.9 PV Poisson 2 400 554.8 345.1 PV Constant 1 800 176.6 60.7 PV Constant 2 400 198.4 101.3 OMS Poisson 1 200 0 0 OMS Poisson 1 800 0 0 OMS Poisson 2 400 0.63 0.01 OMS Constant 1 800 0 0 OMS Constant 2 400 0.84 0.01
下载: 导出CSV
-
[1] Kerner B S. Experimental features of self-organization in traffic flow. Physical Review Letters, 1998, 81(17):3797-3800 doi: 10.1103/PhysRevLett.81.3797 [2] Krauß S. Microscopic Modeling of Traffic Flow:Investigation of Collision Free Vehicle Dynamics[Ph.D. dissertation], University of Cologne, Germany, 1998 [3] Cao W J, Muka M, Kawabe T, Nishira H, Fujiki N. Merging trajectory generation for vehicle on a motor way using receding horizon control framework consideration of its applications. In:Proceedings of the 2014 IEEE Conference on Control Applications (CCA). Juan Les Antibes, France:IEEE, 2014. 2127-2134 [4] Marinescu D, Čurn J, Bouroche M, Cahill V. On-ramp traffic merging using cooperative intelligent vehicles:a slot-based approach. In:Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems (ITSC). Anchorage, AK, USA:IEEE, 2012. 900-906 [5] Rios-Torres J, Malikopoulos A, Pisu P. Online optimal control of connected vehicles for efficient traffic flow at merging roads. In:Proceedings of the 18th International Conference on Intelligent Transportation Systems (ITSC). Las Palmas, Spain:IEEE, 2015. 2432-2437 [6] Awal T, Kulik L, Ramamohanrao K. Optimal traffic merging strategy for communication-and sensor-enabled vehicles. In:Proceedings of the 16th International IEEE Conference on Published of the Intelligent Transportation Systems-(ITSC). The Hague, Netherlands:IEEE, 2013. [7] Wang Z Y, Kulik L, Ramamohanarao K. Proactive traffic merging strategies for sensor-enabled cars. In:Proceedings of the 4th ACM International Workshop on Vehicular Ad Hoc Networks. New York, NY, USA:ACM, 2007. 39-48 [8] 陈思曼, 孟宪实, 马钧.匝道口智能车合流避撞模型及仿真研究.农业装备与车辆工程, 2016, 54(2):44-50 http://mall.cnki.net/magazine/Article/SDLG201602026.htmChen Si-Man, Meng Xian-Shi, Ma Jun. Study on the model and simulation for confluence avoidance at ramp intersection. Agricultural Equipment and Vehicle Engineering, 2016, 54(2):44-50 http://mall.cnki.net/magazine/Article/SDLG201602026.htm [9] Kita H. A merging-giveway interaction model of cars in a merging section:a game theoretic analysis. Transportation Research Part A:Policy and Practice, 1999, 33(3-4):305-312 doi: 10.1016/S0965-8564(98)00039-1 [10] Li L, Wen D, Yao D Y. A survey of traffic control with vehicular communications. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1):425-432 doi: 10.1109/TITS.2013.2277737 [11] Li L, Wang F Y, Zhang Y. Cooperative driving at lane closures. In:Proceedings of the 2007 IEEE Intelligent Vehicles Symposium. Istanbul, Turkey:IEEE, 2007. 1156-1161 [12] Li L, Wang F Y. Cooperative driving at blind crossings using intervehicle communication. IEEE Transactions on Vehicular Technology, 2006, 55(6):1712-1724 doi: 10.1109/TVT.2006.878730 [13] Weng J X, Xue S, Yan X D. Modeling vehicle merging behavior in work zone merging areas during the merging implementation period. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4):917-925 doi: 10.1109/TITS.2015.2477335 [14] Brindle A. Genetic Algorithms for Function Optimization[Ph.D. dissertation], University of Alberta, Canada, 1981. [15] Pei Y L, Dai L L. Study on intelligent lane merge control system for freeway work zones. In:Proceedings of the 2007 Intelligent Transportation Systems Conference. Seattle, WA, USA:IEEE, 2007. 586-591 [16] Wegener A, Piórkowski M, Raya M, Hellbrück H, Fischer S, Hubaux J P. TraCI:an interface for coupling road traffic and network simulators. In:Proceedings of the 11th Communications and Networking Simulation Symposium. New York, NY, USA:ACM, 2008. 155-163 [17] Batista G E A P A, Prati R C, Monard M C. A study of the behavior of several methods for balancing machine learning training data. ACM Sigkdd Explorations Newsletter, 2004, 6(1):20-29 doi: 10.1145/1007730 -

 下载:
下载:




计量
- 文章访问数: 3443
- HTML全文浏览量: 704
- PDF下载量: 986
- 被引次数: 0
