

A Master-slave Cross-coupled Iterative Learning Control for Repetitive Tracking of Nonlinear Contours in Multi-axis Precision Motion Systems
-
摘要: 针对多轴运动系统非线性轮廓的重复跟踪,传统时域交叉耦合迭代学习控制器(Cross-coupled iterative learning control,CCILC)的设计,各轴间的耦合算子计算精度要求高,计算效率低.本文提出一种主从交叉耦合迭代学习控制方法.基于主从控制设计方法,主动轴采用时域CCILC,从动轴采用位置域交叉耦合迭代学习控制(Position domain CCILC,PDCCILC).保证各轴间运动同步性,同时减轻对耦合算子精确性的依赖.因而可以引入轮廓误差矢量法估算耦合算子提高计算效率.采用Lifting的系统时域矩阵展开方法对所提出的算法进行了稳定性分析和性能分析.基于一个两轴毫米级运动平台,三种典型非线性轮廓跟踪(即半圆、抛物线和螺旋线)的数值仿真和实验分析验证了所提出算法的有效性.Abstract: In traditional time domain cross-coupled iterative learning control (CCILC) design, the requirements of high calculation accuracy of coupling gains between axes and low computational efficiency restrict its application to nonlinear contour tracking in repetitive tasks. This paper presents a master-slave cross-coupled iterative learning control. Based on the master-slave control design concept, the master motion axis applies time domain CCILC, while the slave motion axis adopts position domain CCILC (PDCCILC). The proposed PDCCILC control can improve synchronization between axes as well as relieve the dependence on accuracy of coupling gains, therefore, the efficient contour error vector method can be adopted to estimate the coupling gains. both stability and performance analyses are conducted using the lifted system representation method. Simulation and experimental results of the three typical nonlinear contour tracking cases (i.e., semi-circle, parabola and spiral) with a two-axis micro-motion stage have demonstrated superiority and efficacy of the proposed controller.1) 本文责任编委 侯忠生
-
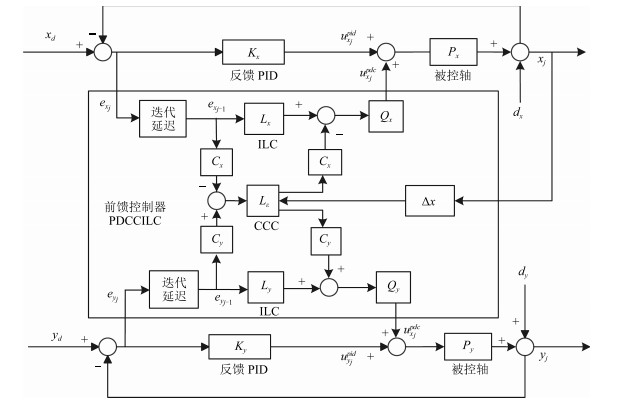
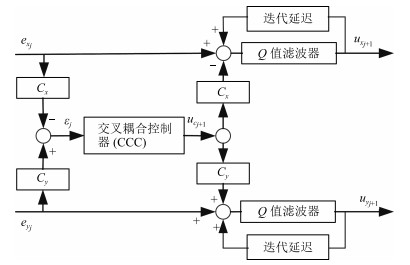
图 3 融合反馈PID和前馈PDCCILC的控制结构
Fig. 3 Combined feedback PID and feedforward PDCCILC control structure

图 7 半圆轮廓跟踪均方根轮廓误差的仿真结果(RMS)
Fig. 7 RMS contour error versus iteration for the semi-circle contour in the simulations
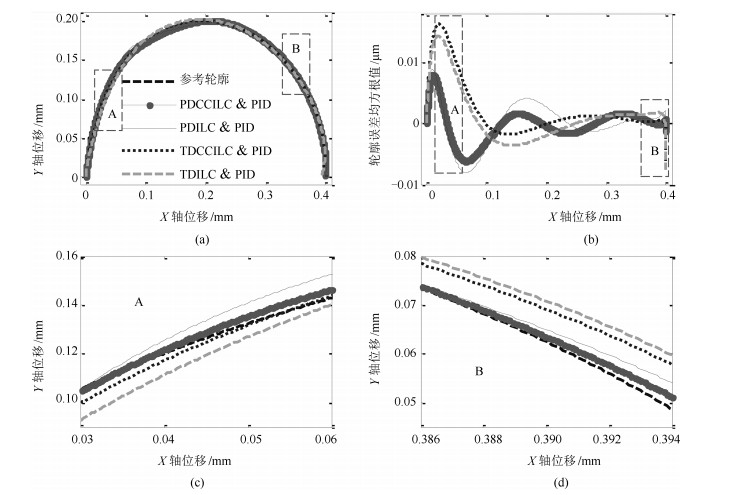
图 8 半圆轮廓跟踪的稳态仿真结果
Fig. 8 Steady tracking results of the semi-circle contour in the simulations
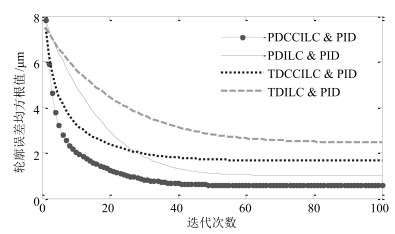
图 9 抛物线轮廓跟踪的仿真均方根轮廓误差(RMS)
Fig. 9 RMS contour error versus iteration for the semi-circle contour in the simulations
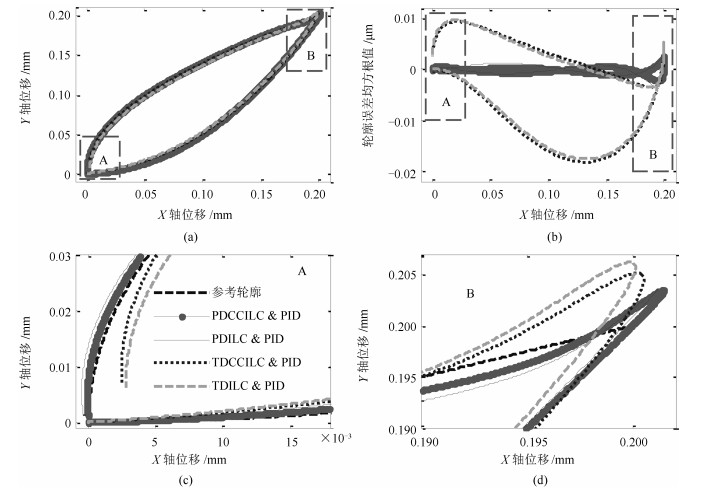
图 10 抛物线轮廓跟踪的稳态仿真结果
Fig. 10 Steady tracking results of the parabolic contour in the simulations
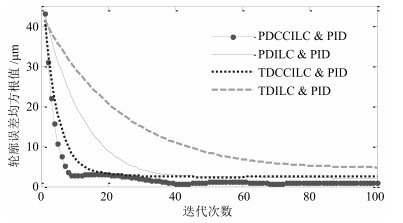
图 11 螺旋线轮廓跟踪的仿真均方根轮廓误差(RMS)
Fig. 11 RMS contour error versus iteration for the spiral contour in the simulations
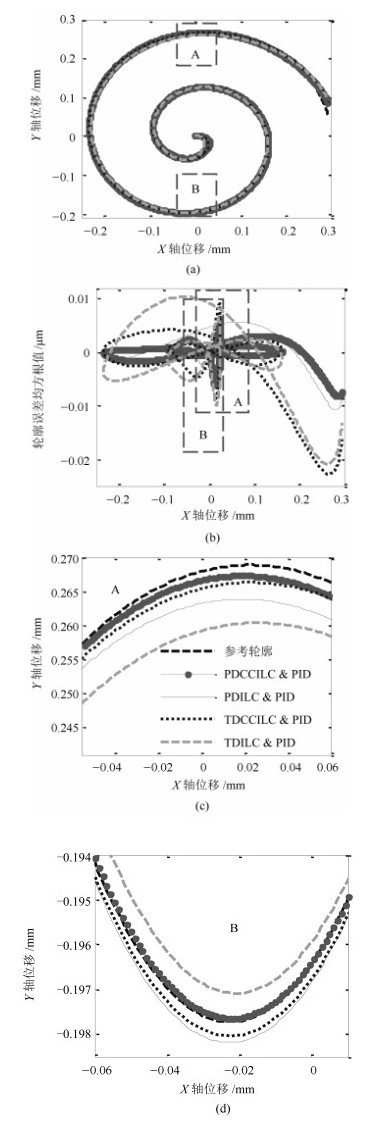
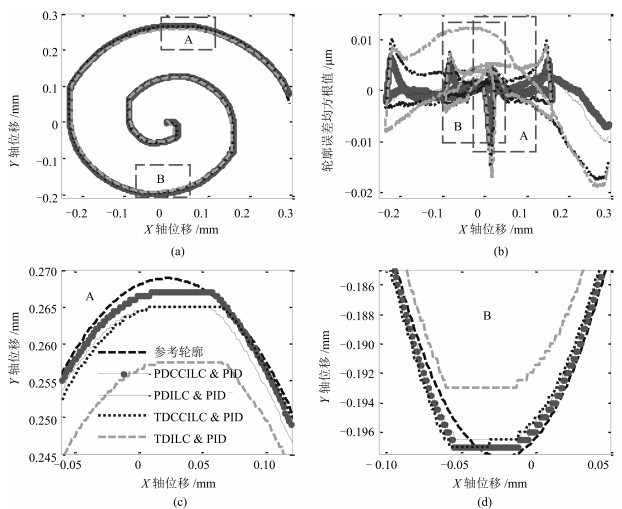
图 12 螺旋线轮廓跟踪的稳态仿真结果
Fig. 12 Steady tracking results of the spiral contour in the simulations
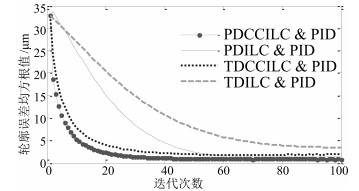
图 13 半圆轮廓跟踪的实验均方根轮廓误差(RMS)
Fig. 13 RMS contour error versus iteration for the semi-circle contour in the experiments
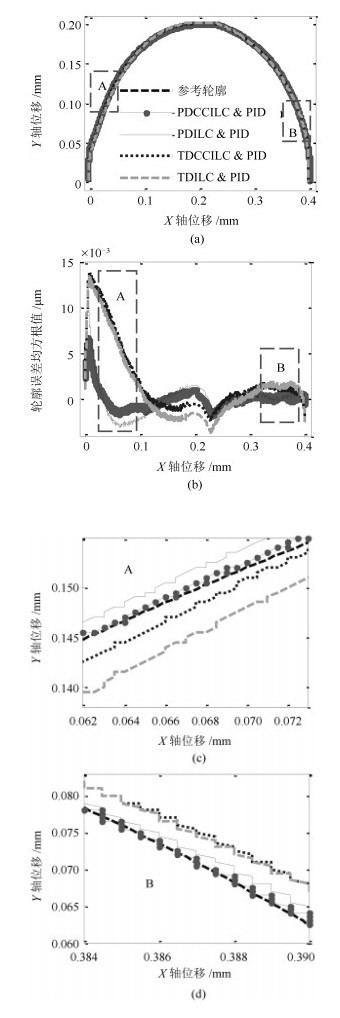
图 14 半圆轮廓跟踪的实验结果
Fig. 14 Tracking results of the semi-circle contour in the experiments
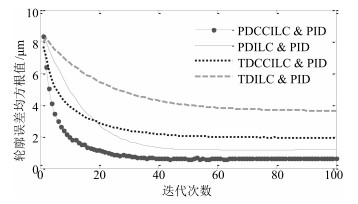
图 15 抛物线轮廓跟踪的实验均方根轮廓误差(RMS)
Fig. 15 RMS contour error versus iteration for the parabolic contour in the experiments
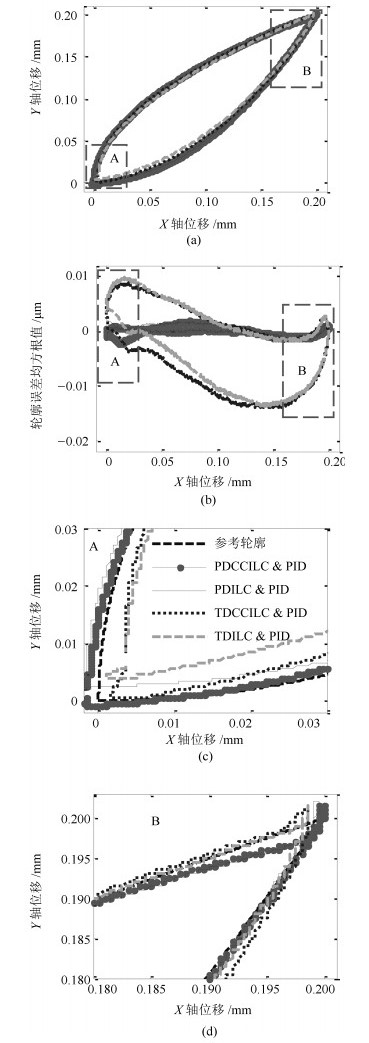
图 16 抛物线轮廓跟踪的实验结果
Fig. 16 Tracking results of the parabolic contour in the experiments
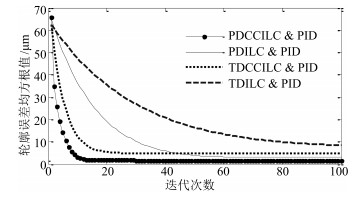
图 17 螺旋线轮廓跟踪的实验均方根轮廓误差(RMS)
Fig. 17 RMS contour error versus iteration for the spiral contour in the experiments
表 1 控制器参数
Table 1 Controller parameters
控制器 增益 ${K_p}$ ${K_i}$ ${K_d}$ PID 3 1 0 ILC 0.3 0.1 0.1 CCC 1 0.5 0  下载: 导出CSV
下载: 导出CSV
表 2 单调收敛的计算结果
Table 2 Computational results of monotonic convergence
控制器 $\bar \sigma \left(M \right)$的计算结果 半圆轮廓 抛物线轮廓 螺旋线轮廓 PDCCILC & PID 3 1 0 TDCCILC & PID 0.3 0.1 0.1 PDILC & PID 1 0.5 0 TDILC & PID 1 0.5 0
下载: 导出CSV
表 3 四种控制器下的三种非线性轮廓跟踪结果实验统计数据(${\mu}$m)
Table 3 Experimental statistics of tracking performance (${\mu}$m)
稳态误差 半圆 抛物线 螺旋线 TDILC & PID RMS 3.405 3.637 7.566 MAX 8.501 8.334 17.429 TDCCILC & PID RMS 1.869 1.924 4.897 MAX 5.170 6.001 15.420 PDILC & PID RMS 1.344 1.197 2.992 MAX 4.348 4.696 11.106 PDCCILC & PID RMS 0.821 0.631 1.551 MAX 2.108 2.907 7.240
下载: 导出CSV
-
[1] Lee D E, Hwang I, Valente C M O, Oliveira J F G, Dornfeld D A. Precision manufacturing process monitoring with acoustic emission. International Journal of Machine Tools and Manufacture, 2006, 46 (2):176-188 doi: 10.1016/j.ijmachtools.2005.04.001 [2] Devasia S, Eleftheriou E, Moheimani S O R. A survey of control issues in nanopositioning. IEEE Transactions on Control Systems Technology, 2007, 15 (5):802-823 doi: 10.1109/TCST.2007.903345 [3] 杨进, 朱煜, 尹文生, 杨开明, 张鸣.超精密微动台离散回路成形控制器优化.机械工程学报, 2013, 49(10):178-185 http://www.cnki.com.cn/Article/CJFDTotal-KZLY201410008.htmYang Jin, Zhu Yu, Yin Wen-Sheng, Yang Kai-Ming, Zhang Ming. Discrete loop shaping controller optimization for ultra-precision positioning stage. Journal of Mechanical Engineering, 2013, 49 (10):178-185 http://www.cnki.com.cn/Article/CJFDTotal-KZLY201410008.htm [4] Shen J C, Lu Q Z, Wu C H, Jywe W Y. Sliding-mode tracking control with DNLRX model-based friction compensation for the precision stage. IEEE/ASME Transactions on Mechatronics, 2014, 19 (2):788-797 doi: 10.1109/TMECH.2013.2260762 [5] 侯忠生, 董航瑞, 金尚泰.基于坐标补偿的自动泊车系统无模型自适应控制.自动化学报, 2015, 41 (4):823-831 http://www.aas.net.cn/CN/abstract/abstract18656.shtmlHou Zhong-Sheng, Dong Hang-Rui, Jin Shang-Tai. Model-free adaptive control with coordinates compensation for automatic car parking systems. Acta Automatica Sinica, 2015, 41 (4):823-831 http://www.aas.net.cn/CN/abstract/abstract18656.shtml [6] 卜旭辉, 侯忠生, 余发山, 付子义.基于迭代学习的农业车辆路径跟踪控制.自动化学报, 2014, 40 (2):368-372 http://www.aas.net.cn/CN/abstract/abstract18298.shtmlBu Xu-Hui, Hou Zhong-Sheng, Yu Fa-Shan, Fu Zi-Yi. Iterative learning control for trajectory tracking of farm vehicles. Acta Automatica Sinica, 2014, 40 (2):368-372 http://www.aas.net.cn/CN/abstract/abstract18298.shtml [7] 李翠艳, 张东纯, 庄显义.重复控制综述.电机与控制学报, 2005, 9(1):37-44 https://www.wenkuxiazai.com/doc/30b99ff17c1cfad6195fa75d...Li Cui-Yan, Zhang Dong-Chun, Zhuang Xian-Yi. Repetitive control-a survey. Electric Machines and Control, 2005, 9 (1):37-44 https://www.wenkuxiazai.com/doc/30b99ff17c1cfad6195fa75d... [8] Ouyang P R, Dam T, Huang J, Zhang W J. Contour tracking control in position domain. Mechatronics, 2012, 22 (7):934-944 doi: 10.1016/j.mechatronics.2012.06.001 [9] Koren Y. Cross-coupled biaxial computer control for manufacturing systems. Journal of Dynamic Systems, Measurement, and Control, 1980, 102 (4):265-272 doi: 10.1115/1.3149612 [10] Sun H Q, Alleyne A G. A cross-coupled non-lifted norm optimal iterative learning control approach with application to a multi-axis robotic testbed. IFAC Proceedings Volumes, 2014, 47 (3):2046-2051 doi: 10.3182/20140824-6-ZA-1003.00519 [11] Barton K L, Alleyne A G. A cross-coupled iterative learning control design for precision motion control. IEEE Transactions on Control Systems Technology, 2008, 16 (6):1218-1231 doi: 10.1109/TCST.2008.919433 [12] Barton K L, Hoelzle D J, Alleyne A G, Johnson A J W. Cross-coupled iterative learning control of systems with dissimilar dynamics:design and implementation. International Journal of Control, 2011, 84 (7):1223-1233 doi: 10.1080/00207179.2010.500334 [13] 李轩, 莫红, 李双双, 王飞跃. 3D打印技术过程控制问题研究进展.自动化学报, 2016, 42 (7):983-1003 http://www.aas.net.cn/CN/abstract/abstract18890.shtmlLi Xuan, Mo Hong, Li Shuang-Shuang, Wang Fei-Yue. Research progress on 3D printing technology process control problem. Acta Automatica Sinica, 2016, 42 (7):983-1003 http://www.aas.net.cn/CN/abstract/abstract18890.shtml [14] Paul P C, Knoll A W, Holzner F, Despont S, Duerig U. Rapid turnaround scanning probe nanolithography. Nanotechnology, 2011, 22 (27):Article No. 275306 doi: 10.1088/0957-4484/22/27/275306 [15] Tuma T, Sebastian A, Lygeros J, Pantazi A. The four pillars of nanopositioning for scanning probe microscopy:the position sensor, the scanning device, the feedback controller, and the reference trajectory. IEEE Control Systems, 2013, 33 (6):68-85 doi: 10.1109/MCS.2013.2279473 [16] 马立, 荣伟彬, 孙立宁, 龚振邦.面向光学精密装配的微操作机器人.机械工程学报, 2009, 45 (2):280-287 http://www.wenkuxiazai.com/doc/2079f680ec3a87c24028c47f.htmlMa Li, Rong Wei-Bin, Sun Li-Ning, Gong Zhen-Bang. Micro operation robot for optical precise assembly. Journal of Mechanical Engineering, 2009, 45 (2):280-287 http://www.wenkuxiazai.com/doc/2079f680ec3a87c24028c47f.html [17] Koren Y, Lo C C. Variable-gain cross-coupling controller for contouring. CIRP Annals-Manufacturing Technology, 1991, 40 (1):371-374 doi: 10.1016/S0007-8506(07)62009-5 [18] Koren Y, Lo C C. Advanced controllers for feed drives. CIRP Annals-Manufacturing Technology, 1992, 41 (2):689-698 doi: 10.1016/S0007-8506(07)63255-7 [19] Yeh S S, Hsu P L. Estimation of the contouring error vector for the cross-coupled control design. IEEE/ASME Transactions on Mechatronics, 2002, 7 (1):44-51 doi: 10.1109/3516.990886 [20] Ouyang P R, Dam T. Position domain PD control:stability and comparison. In:Proceedings of the 2011 IEEE International Conference on Information and Automation (ICIA). Shenzhen, China:IEEE, 2011 8-13 [21] Ouyang P R, Pano V, Acob J. Position domain contour control for multi-DOF robotic system. Mechatronics, 2013, 23 (8):1061-1071 doi: 10.1016/j.mechatronics.2013.08.005 [22] Bristow D A, Tharayil M, Alleyne A G. A survey of iterative learning control. IEEE Control Systems, 2006, 26 (3):96-114 doi: 10.1109/MCS.2006.1636313 [23] Boeren F, Bareja A, Kok T, Oomen T. Unified ILC framework for repeating and varying tasks:a frequency domain approach with application to a wire-bonder. In:Proceedings of the 54th IEEE Annual Conference on Decision and Control (CDC). Osaka, Japan:IEEE, 2015 6724-6729 [24] Ahn H S, Chen Y Q, Moore K L. Iterative learning control:brief survey and categorization. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2007, 37 (6):1099-1121 doi: 10.1109/TSMCC.2007.905759 [25] Shan Y F, Leang K K. Design and control for high-speed nanopositioning:serial-kinematic nanopositioners and repetitive control for nanofabrication. IEEE Control Systems, 2013, 33 (6):86-105 doi: 10.1109/MCS.2013.2279474 [26] Ramdani A, Said G, Youcef S. Application of predictive controller tuning and a comparison study in terms of PID controllers. International Journal of Hydrogen Energy, 2016, 41 (29):12454-12464 doi: 10.1016/j.ijhydene.2016.05.102 [27] Ang K H, Chong G, Li Y. PID control system analysis, design, and technology. IEEE Transactions on Control Systems Technology, 2005, 13 (4):559-576 doi: 10.1109/TCST.2005.847331 [28] Garcia D, Karimi A, Longchamp R. PID controller design for multivariable systems using Gershgorin bands. In:Proceedings of the 16th IFAC World Congress. Prague, Czech Republic:IFAC, 2005. [29] Norrlöf M, Gunnarsson S. Time and frequency domain convergence properties in iterative learning control. International Journal of Control, 2002, 75 (14):1114-1126 doi: 10.1080/00207170210159122 -

计量
- 文章访问数: 2502
- HTML全文浏览量: 289
- PDF下载量: 914
- 被引次数: 0
