2019年 第45卷 第6期
2019, 45(6): 1015-1030.
doi: 10.16383/j.aas.c180100
摘要:
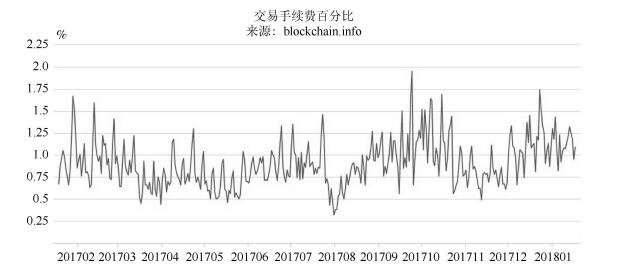
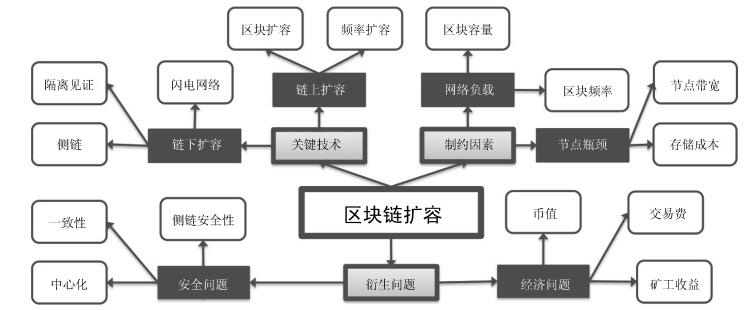
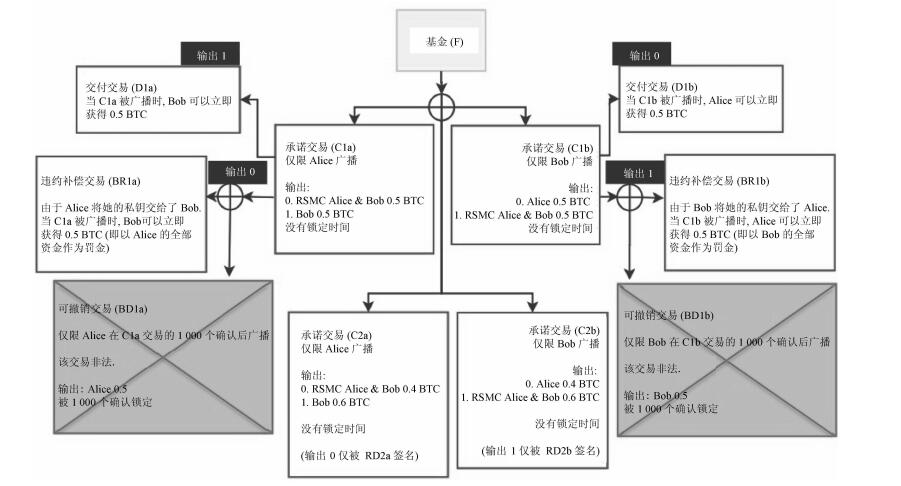
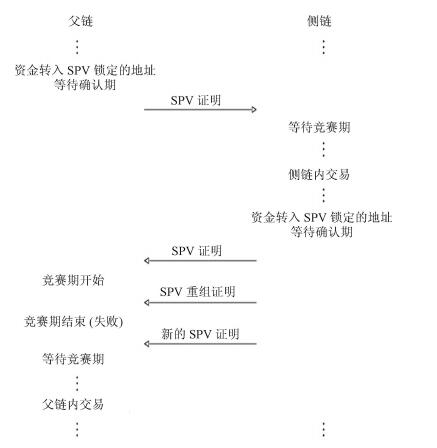
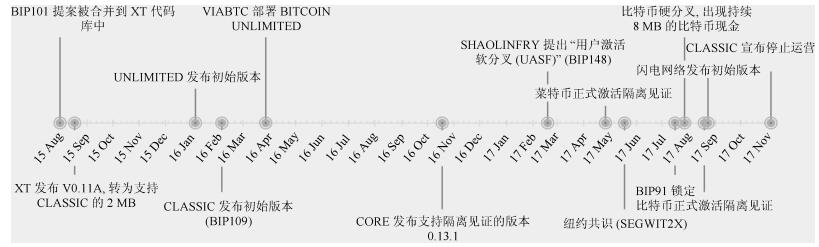
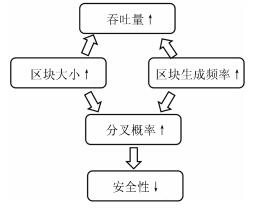
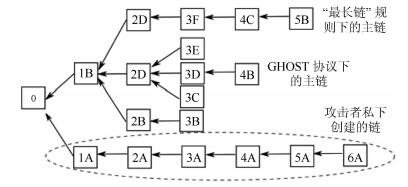
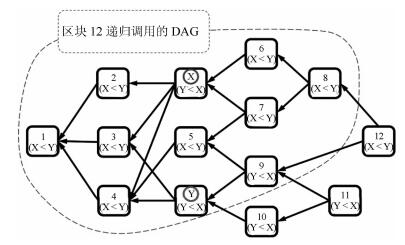
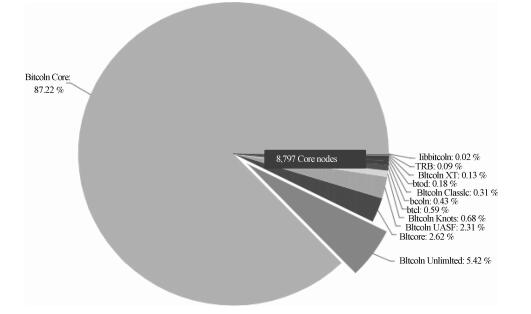
比特币是一种利用区块链技术的点对点记账系统.随着比特币的发展,现有的比特币系统架构已经不能满足日益增长的交易需求,亟需扩容以寻求长期发展.比特币是以人为核心的复杂社会经济系统,比特币扩容是涉及多方利益的复杂问题,引起了业界与学术界的广泛关注.本文提出了一个比特币系统扩容问题的研究框架,包括关键技术,制约因素与衍生问题三部分,以深入探讨和研究比特币扩容问题.在该研究框架下,首先介绍链上和链下两类扩容关键技术及发展现状;其次从网络负载和节点瓶颈两方面,总结制约比特币扩容方案的宏观与微观因素;最后,探讨两类衍生问题:从系统安全性的角度,探讨比特币扩容可能引发的安全问题及解决策略;从币值、交易费与矿工收益等方面,阐述比特币扩容涉及的经济问题.
比特币是一种利用区块链技术的点对点记账系统.随着比特币的发展,现有的比特币系统架构已经不能满足日益增长的交易需求,亟需扩容以寻求长期发展.比特币是以人为核心的复杂社会经济系统,比特币扩容是涉及多方利益的复杂问题,引起了业界与学术界的广泛关注.本文提出了一个比特币系统扩容问题的研究框架,包括关键技术,制约因素与衍生问题三部分,以深入探讨和研究比特币扩容问题.在该研究框架下,首先介绍链上和链下两类扩容关键技术及发展现状;其次从网络负载和节点瓶颈两方面,总结制约比特币扩容方案的宏观与微观因素;最后,探讨两类衍生问题:从系统安全性的角度,探讨比特币扩容可能引发的安全问题及解决策略;从币值、交易费与矿工收益等方面,阐述比特币扩容涉及的经济问题.






2019, 45(6): 1031-1043.
doi: 10.16383/j.aas.c170701
摘要:
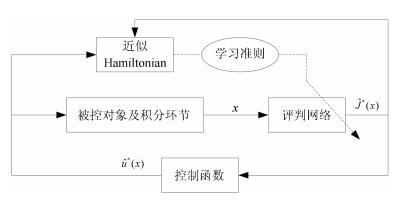
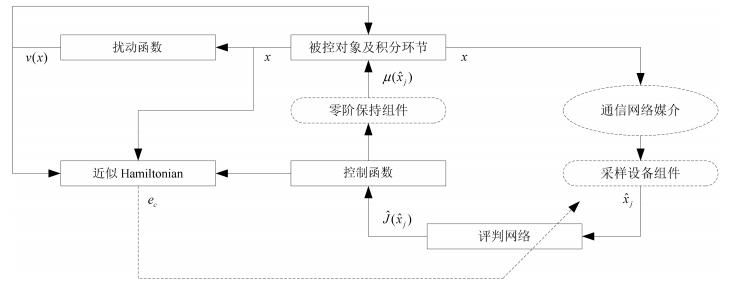
在作为人工智能核心技术的机器学习领域,强化学习是一类强调机器在与环境的交互过程中进行学习的方法,其重要分支之一的自适应评判技术与动态规划及最优化设计密切相关.为了有效地求解复杂动态系统的优化控制问题,结合自适应评判,动态规划和人工神经网络产生的自适应动态规划方法已经得到广泛关注,特别在考虑不确定因素和外部扰动时的鲁棒自适应评判控制方面取得了很大进展,并被认为是构建智能学习系统和实现真正类脑智能的必要途径.本文对基于智能学习的鲁棒自适应评判控制理论与主要方法进行梳理,包括自学习鲁棒镇定,自适应轨迹跟踪,事件驱动鲁棒控制,以及自适应H∞控制设计等,并涵盖关于自适应评判系统稳定性、收敛性、最优性以及鲁棒性的分析.同时,结合人工智能、大数据、深度学习和知识自动化等新技术,也对鲁棒自适应评判控制的发展前景进行探讨.
在作为人工智能核心技术的机器学习领域,强化学习是一类强调机器在与环境的交互过程中进行学习的方法,其重要分支之一的自适应评判技术与动态规划及最优化设计密切相关.为了有效地求解复杂动态系统的优化控制问题,结合自适应评判,动态规划和人工神经网络产生的自适应动态规划方法已经得到广泛关注,特别在考虑不确定因素和外部扰动时的鲁棒自适应评判控制方面取得了很大进展,并被认为是构建智能学习系统和实现真正类脑智能的必要途径.本文对基于智能学习的鲁棒自适应评判控制理论与主要方法进行梳理,包括自学习鲁棒镇定,自适应轨迹跟踪,事件驱动鲁棒控制,以及自适应H∞控制设计等,并涵盖关于自适应评判系统稳定性、收敛性、最优性以及鲁棒性的分析.同时,结合人工智能、大数据、深度学习和知识自动化等新技术,也对鲁棒自适应评判控制的发展前景进行探讨.

2019, 45(6): 1044-1054.
doi: 10.16383/j.aas.2018.c170425
摘要:
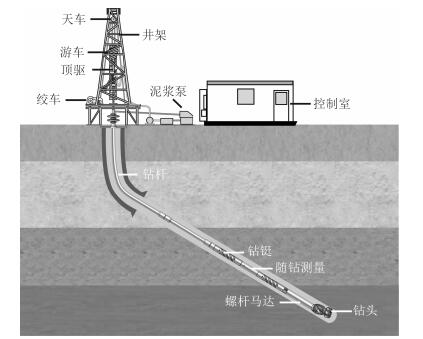
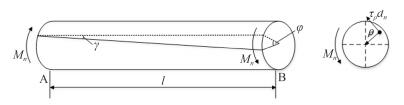
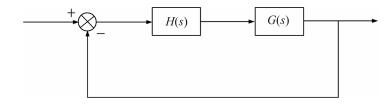
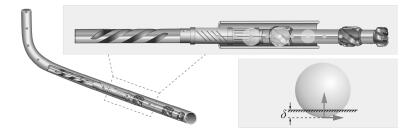
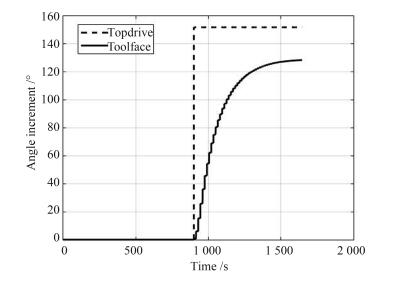
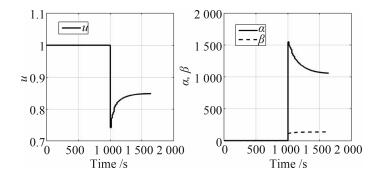
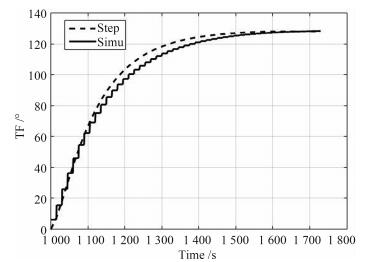
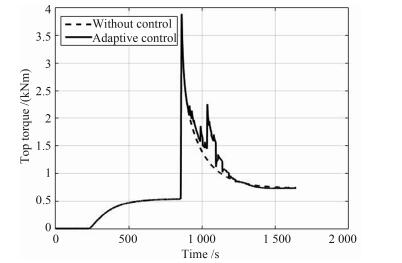
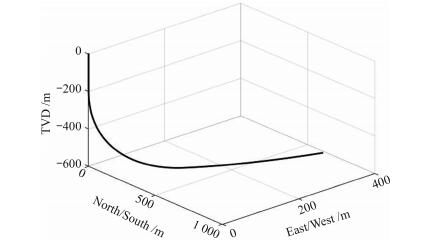
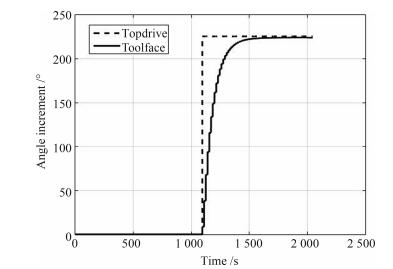
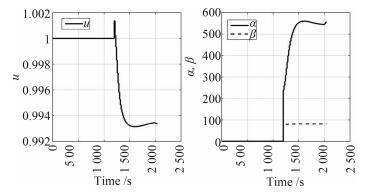
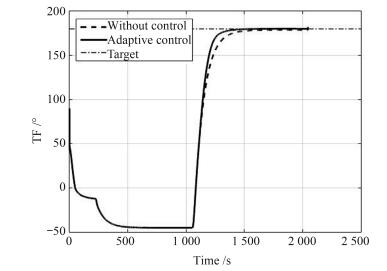
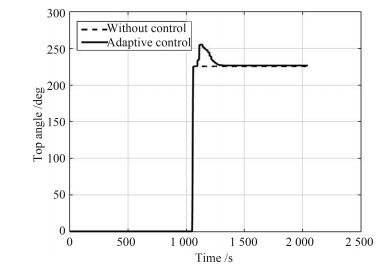
滑动导向钻井过程中,由于钻柱滑动摩擦阻力较大,工具面角的调整速度较为缓慢,且大多依赖司钻的经验,大大降低了钻井工作效率.论文建立了滑动导向钻井系统工具面控制对象的简化传递函数模型,并针对该模型提出一种具有自适应性的工具面动态控制方法.该方法采用微分正反馈控制律以提高工具面角的调整速度,并利用自适应方法对模型参数进行在线辨识,实时修正控制参数.最后通过动力学仿真验证了该方法能实现工具面角无超调无稳态误差的快速响应,且能根据参数辨识结果自动调整控制参数,无需依赖司钻经验,从而有效提高滑动导向钻井的工具面调整效率.
滑动导向钻井过程中,由于钻柱滑动摩擦阻力较大,工具面角的调整速度较为缓慢,且大多依赖司钻的经验,大大降低了钻井工作效率.论文建立了滑动导向钻井系统工具面控制对象的简化传递函数模型,并针对该模型提出一种具有自适应性的工具面动态控制方法.该方法采用微分正反馈控制律以提高工具面角的调整速度,并利用自适应方法对模型参数进行在线辨识,实时修正控制参数.最后通过动力学仿真验证了该方法能实现工具面角无超调无稳态误差的快速响应,且能根据参数辨识结果自动调整控制参数,无需依赖司钻经验,从而有效提高滑动导向钻井的工具面调整效率.







2019, 45(6): 1055-1064.
doi: 10.16383/j.aas.c180177
摘要:
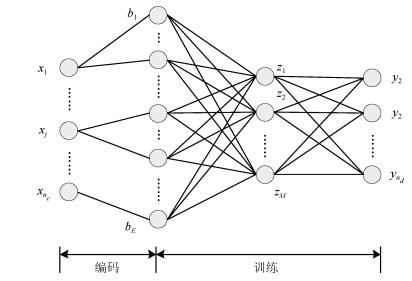
针对仿真实验设计方法众多而在实际应用中难以准确选择的问题,提出一种用于仿真实验设计方法智能选择的混合推理方法.首先,给出了基于混合推理的仿真实验智能化设计流程;然后,针对案例检索策略,将仿真实验设计案例的属性分为三种类型,分别给出其属性差异度量模型及特征值归一化方法,并采用训练后的神经网络模型分配属性权重;进一步,当推荐的案例未能满足给定的相似度阈值时,引入属性优先级的概念,提出了一种基于规则的柔性逐层推理方法;在此基础上,设计了案例库和规则库;最后,通过实验验证了所提出方法的有效性.
针对仿真实验设计方法众多而在实际应用中难以准确选择的问题,提出一种用于仿真实验设计方法智能选择的混合推理方法.首先,给出了基于混合推理的仿真实验智能化设计流程;然后,针对案例检索策略,将仿真实验设计案例的属性分为三种类型,分别给出其属性差异度量模型及特征值归一化方法,并采用训练后的神经网络模型分配属性权重;进一步,当推荐的案例未能满足给定的相似度阈值时,引入属性优先级的概念,提出了一种基于规则的柔性逐层推理方法;在此基础上,设计了案例库和规则库;最后,通过实验验证了所提出方法的有效性.



2019, 45(6): 1065-1073.
doi: 10.16383/j.aas.2018.c170506
摘要:
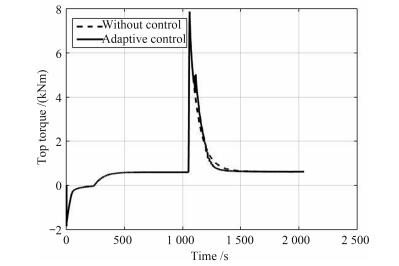
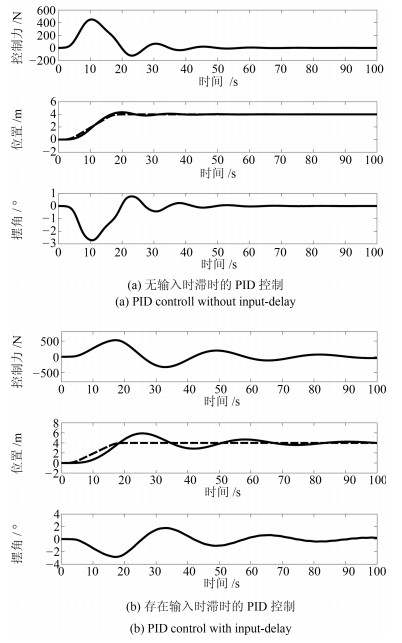
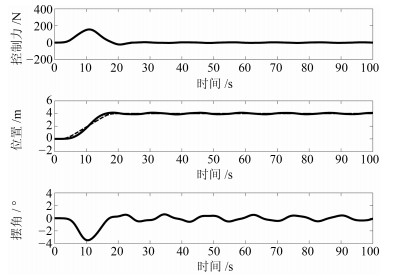
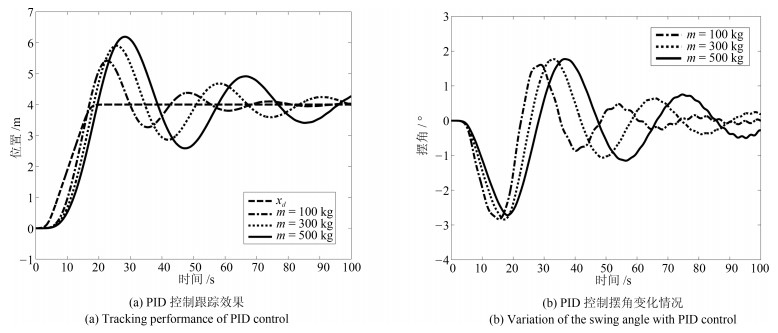
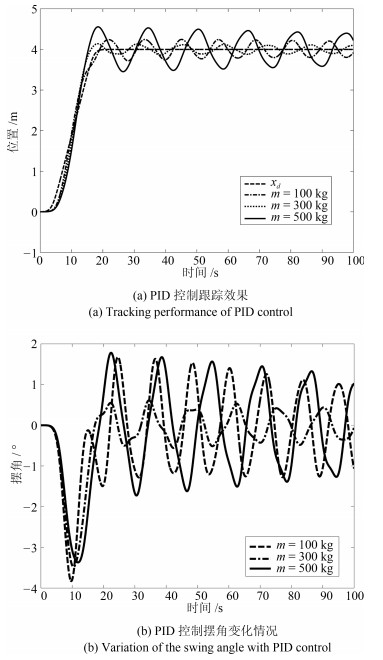
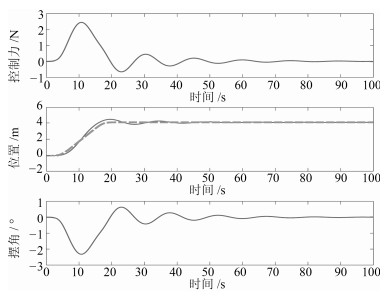
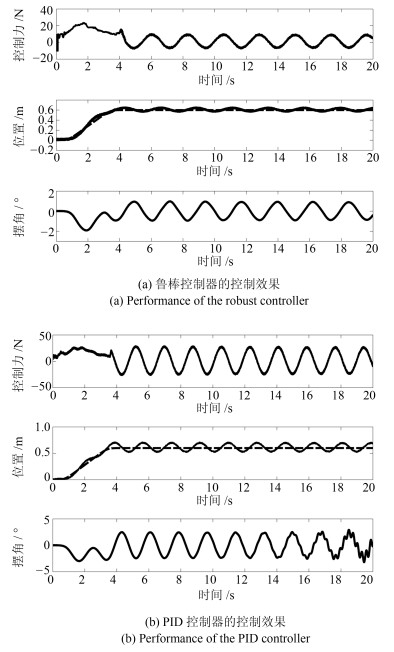
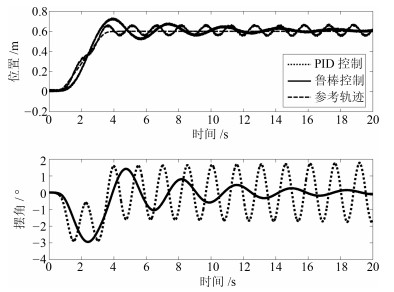
针对工业桥式起重机输入信号存在时滞的问题,本文设计了一种鲁棒跟踪控制器.具体而言,本文通过分析欠驱动桥式起重机的特性,引入辅助系统,将时滞模型等效为不存在时滞的模型.在此基础上,考虑系统参数的不确定性,设计了一种鲁棒跟踪控制器.本文使用基于Lyapunov理论的稳定性分析及证明方法,通过建立Lyapunov-Krasovskii(LK)方程证明了位置跟踪误差以及摆角可以在有限时间内收敛到一个界内,且界的大小与控制增益负相关.完成控制器设计后,将其与工业上常用的比例-积分-微分(Proportion-integration-differentiation,PID)控制方法进行比较.仿真及实验结果表明,本文所设计的控制器优于PID控制器,具有良好的控制性能.
针对工业桥式起重机输入信号存在时滞的问题,本文设计了一种鲁棒跟踪控制器.具体而言,本文通过分析欠驱动桥式起重机的特性,引入辅助系统,将时滞模型等效为不存在时滞的模型.在此基础上,考虑系统参数的不确定性,设计了一种鲁棒跟踪控制器.本文使用基于Lyapunov理论的稳定性分析及证明方法,通过建立Lyapunov-Krasovskii(LK)方程证明了位置跟踪误差以及摆角可以在有限时间内收敛到一个界内,且界的大小与控制增益负相关.完成控制器设计后,将其与工业上常用的比例-积分-微分(Proportion-integration-differentiation,PID)控制方法进行比较.仿真及实验结果表明,本文所设计的控制器优于PID控制器,具有良好的控制性能.

2019, 45(6): 1074-1086.
doi: 10.16383/j.aas.c180558
摘要:
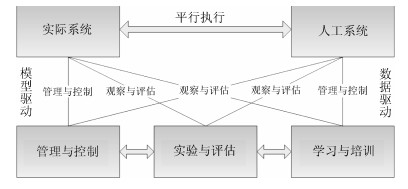
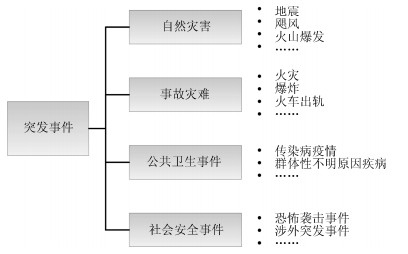
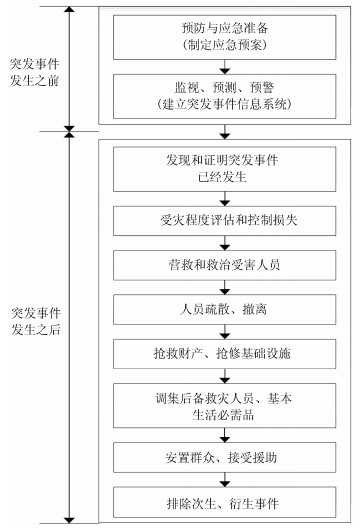
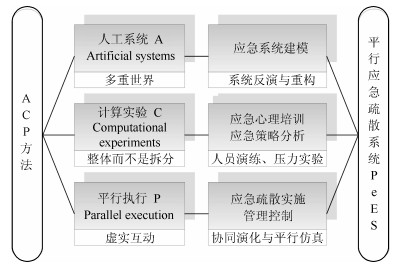
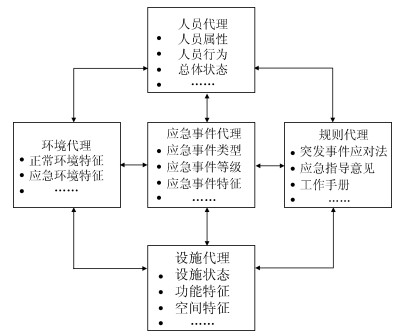
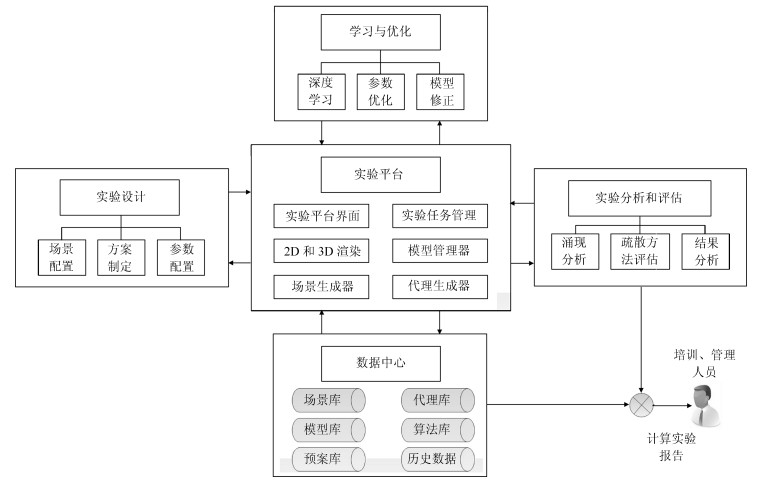
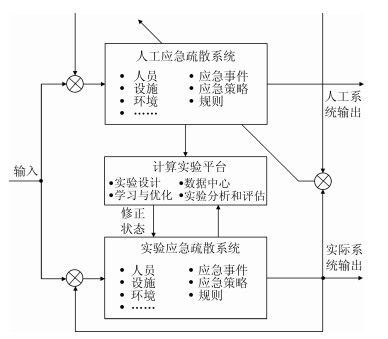
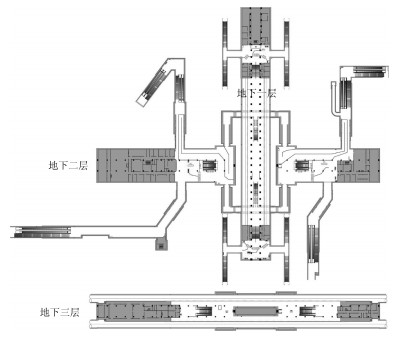
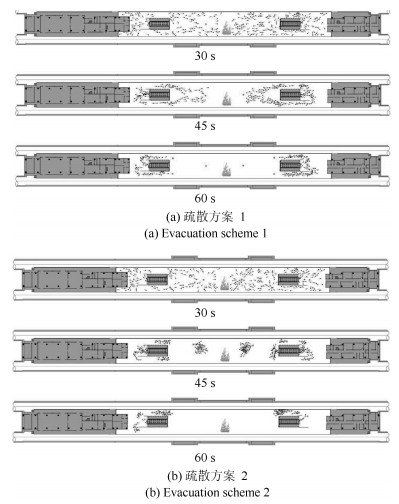
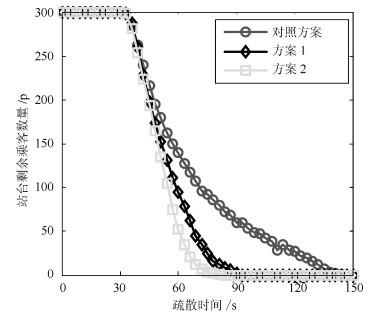
突发事件通常具有难以预测、多成因关联、危害性大及演变复杂等特点,应急情况下如何安全高效疏散人员是应急管控领域的重要研究内容.本文将基于人工系统(Artificial systems,A)、计算实验(Computational experiments,C)、平行执行(Parallel excution,P)方法的平行系统理论引入到应急管控领域,提出平行应急疏散系统(Parallel emergency evacuation systems,PeES)基本概念,构建系统体系框架及集成平台,并介绍人工应急疏散系统、计算实验、平行执行等主要功能模块的基本功能及实现方法.通过PeES能实现虚实应急疏散系统的管理与控制、应急方案的实验与评估以及相关人员的学习与培训.最后,以轨道交通枢纽站火灾场景下的乘客应急疏散为典型应用对平行应急疏散系统进行初步验证.
突发事件通常具有难以预测、多成因关联、危害性大及演变复杂等特点,应急情况下如何安全高效疏散人员是应急管控领域的重要研究内容.本文将基于人工系统(Artificial systems,A)、计算实验(Computational experiments,C)、平行执行(Parallel excution,P)方法的平行系统理论引入到应急管控领域,提出平行应急疏散系统(Parallel emergency evacuation systems,PeES)基本概念,构建系统体系框架及集成平台,并介绍人工应急疏散系统、计算实验、平行执行等主要功能模块的基本功能及实现方法.通过PeES能实现虚实应急疏散系统的管理与控制、应急方案的实验与评估以及相关人员的学习与培训.最后,以轨道交通枢纽站火灾场景下的乘客应急疏散为典型应用对平行应急疏散系统进行初步验证.


2019, 45(6): 1087-1093.
doi: 10.16383/j.aas.c160794
摘要:
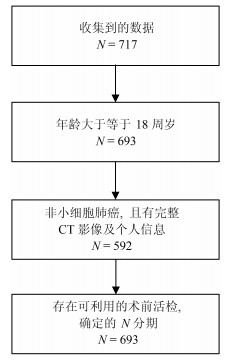
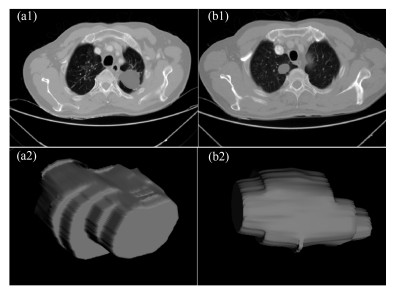
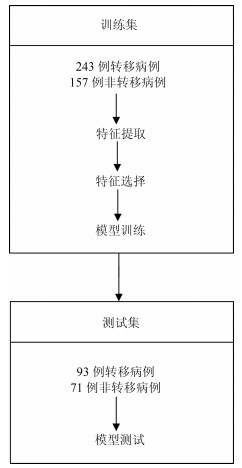
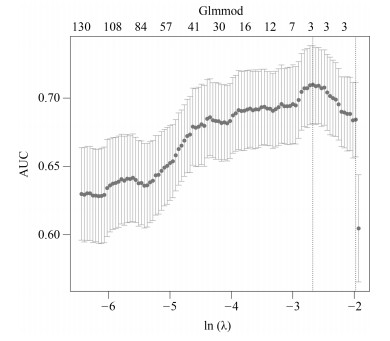
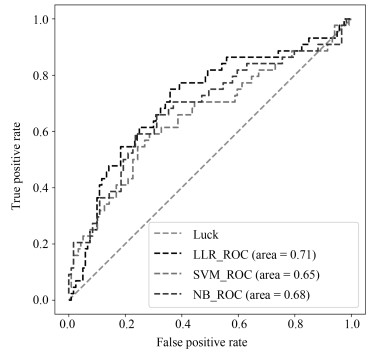
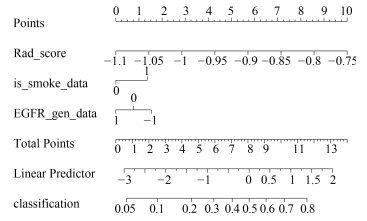
在非小细胞肺癌的临床诊疗中,淋巴结是否转移对于医生制定手术方案有重要指导意义.但是目前临床上缺乏能够安全准确地预测非小细胞肺癌淋巴结转移的方法.本文应用影像组学方法对肺部CT影像进行定量分析来实现对非小细胞肺癌淋巴结是否转移的预测.从广东省人民医院收集了564例满足分析要求的非小细胞肺癌病例数据,并从每例CT影像中提取了386个定量影像特征,包括肿瘤的三维形状特征,表面纹理特征,Gabor特征以及小波特征:然后利用Lasso logistic regression(LLR)来构造非小细胞肺癌淋巴结转移的影像组学标签(Rad-score),并结合临床信息进行多元分析,构造了诺模图个性化预测模型.其中,LLR淋巴结转移预测模型性能在训练集上AUC为0.710,测试集AUC为0.712:在个性化诺模图上,用所有数据进行预测,得到C-index为0.724(95% CI:0.678~0.770),在一致性曲线上表现较佳,可为临床决策提供有价值的信息.
在非小细胞肺癌的临床诊疗中,淋巴结是否转移对于医生制定手术方案有重要指导意义.但是目前临床上缺乏能够安全准确地预测非小细胞肺癌淋巴结转移的方法.本文应用影像组学方法对肺部CT影像进行定量分析来实现对非小细胞肺癌淋巴结是否转移的预测.从广东省人民医院收集了564例满足分析要求的非小细胞肺癌病例数据,并从每例CT影像中提取了386个定量影像特征,包括肿瘤的三维形状特征,表面纹理特征,Gabor特征以及小波特征:然后利用Lasso logistic regression(LLR)来构造非小细胞肺癌淋巴结转移的影像组学标签(Rad-score),并结合临床信息进行多元分析,构造了诺模图个性化预测模型.其中,LLR淋巴结转移预测模型性能在训练集上AUC为0.710,测试集AUC为0.712:在个性化诺模图上,用所有数据进行预测,得到C-index为0.724(95% CI:0.678~0.770),在一致性曲线上表现较佳,可为临床决策提供有价值的信息.


2019, 45(6): 1094-1102.
doi: 10.16383/j.aas.c180809
摘要:
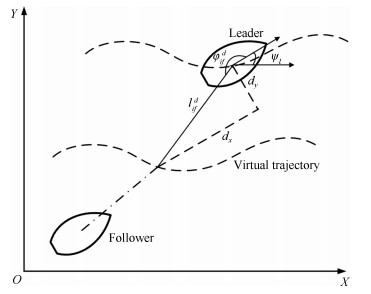
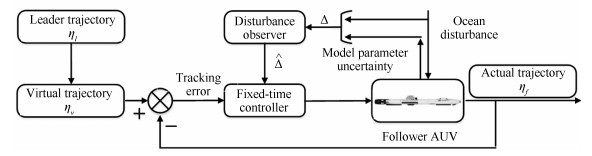
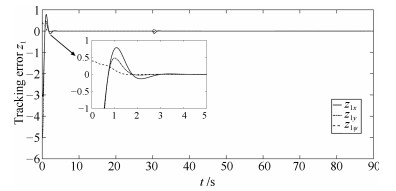
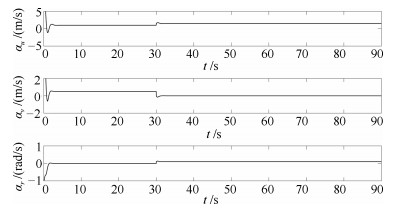
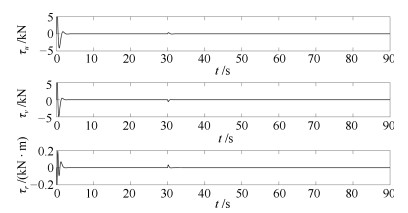
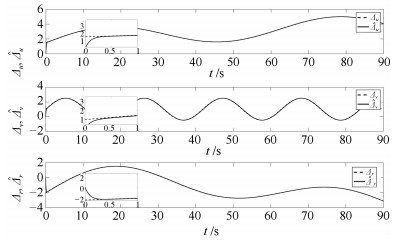
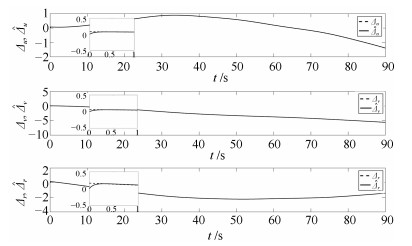
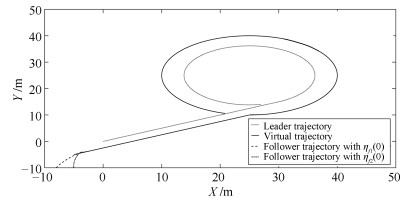
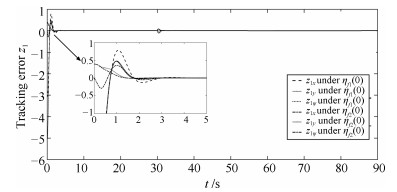
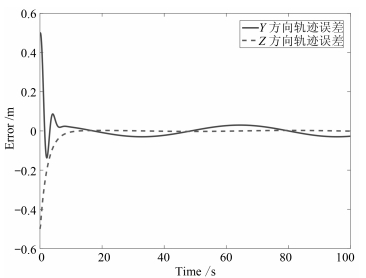
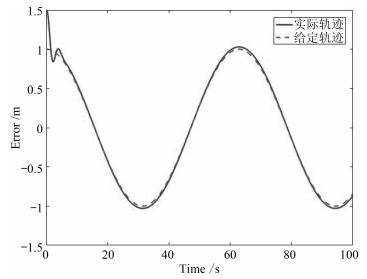
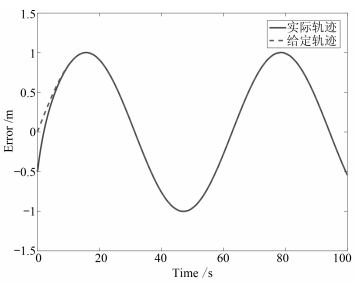
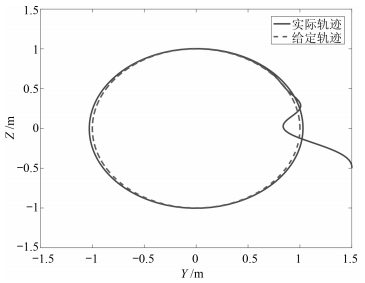
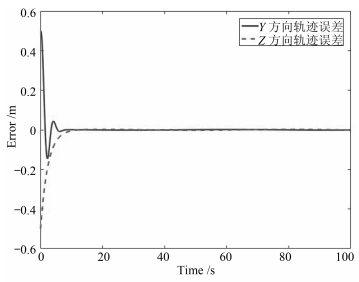
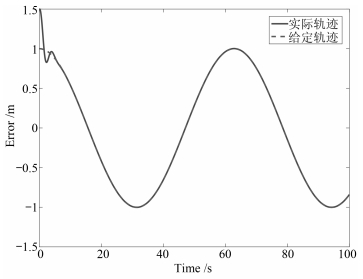
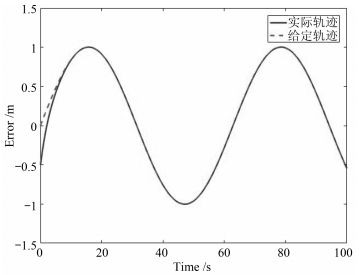
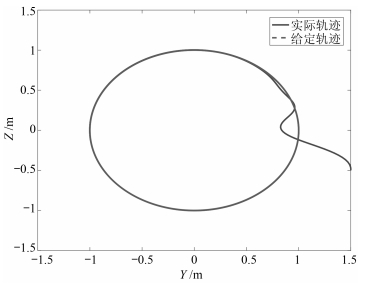
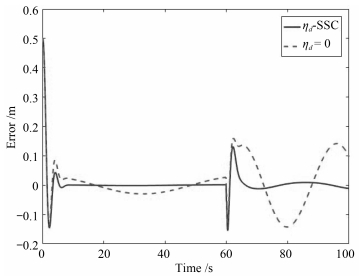
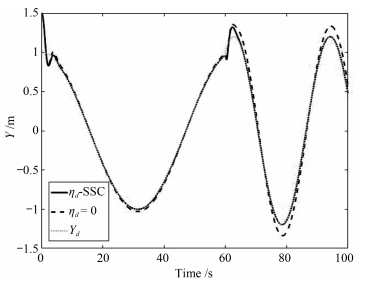
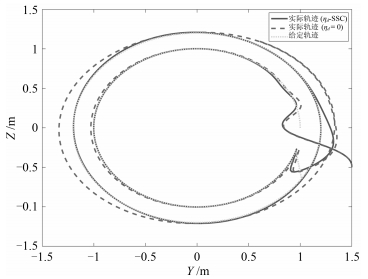
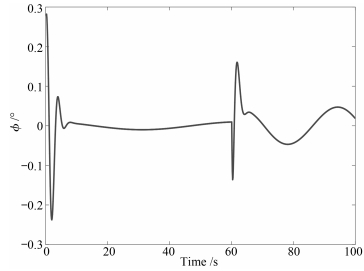
考虑含有模型参数不确定及未知海洋扰动的多AUVs协同编队问题,本文提出一种新的控制方法,该方法可保证编队在固定时间内实现.首先,将模型参数不确定及海洋扰动看作复合扰动,设计扰动观测器,实现固定时间内对扰动的精确估计.基于扰动观测器,指令滤波技术、固定时间理论及虚拟轨迹概念,设计编队控制律,实现编队目标,并保证闭环系统中的所有信号是全局固定时间稳定的.最后通过两艘AUV的编队仿真验证了所提算法的有效性.
考虑含有模型参数不确定及未知海洋扰动的多AUVs协同编队问题,本文提出一种新的控制方法,该方法可保证编队在固定时间内实现.首先,将模型参数不确定及海洋扰动看作复合扰动,设计扰动观测器,实现固定时间内对扰动的精确估计.基于扰动观测器,指令滤波技术、固定时间理论及虚拟轨迹概念,设计编队控制律,实现编队目标,并保证闭环系统中的所有信号是全局固定时间稳定的.最后通过两艘AUV的编队仿真验证了所提算法的有效性.



2019, 45(6): 1103-1110.
doi: 10.16383/j.aas.c180191
摘要:
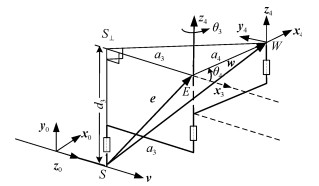
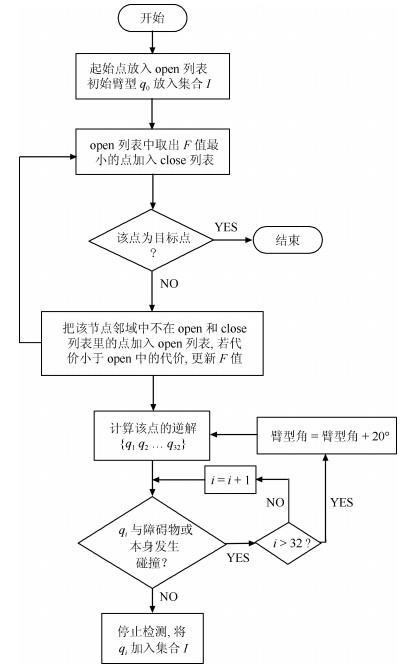
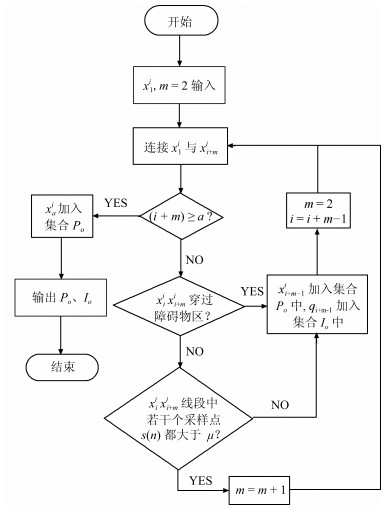
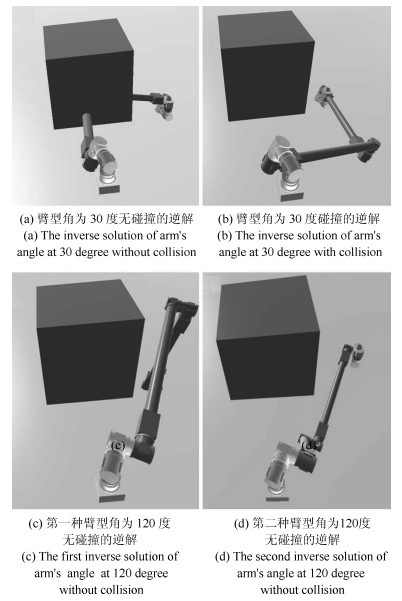
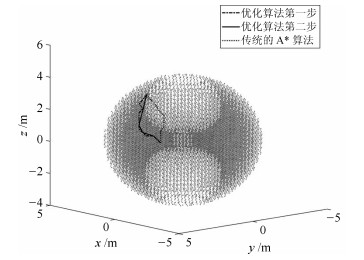
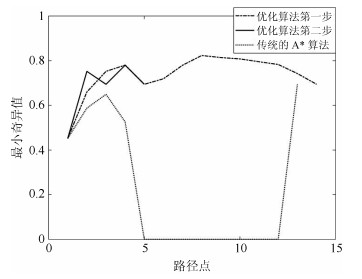
针对空间站遥操作7DOF冗余机械臂路径规划的安全性、可靠性问题,提出了基于臂型角逆运动学的优化A*路径规划算法.本文根据臂型角参数化完善了逆运动学方法,得到了32组完备逆解集,增加了路径规划时逆解选择的灵活性;通过臂型角搜索和最小奇异值优化A*路径规划算法,提高机械臂避障、避奇异能力,机械臂操作的灵活性和路径的安全可靠性;同时根据路径优化策略,有效平滑了路径,减少了机械臂的磨损.仿真结果说明了该方法的有效性.
针对空间站遥操作7DOF冗余机械臂路径规划的安全性、可靠性问题,提出了基于臂型角逆运动学的优化A*路径规划算法.本文根据臂型角参数化完善了逆运动学方法,得到了32组完备逆解集,增加了路径规划时逆解选择的灵活性;通过臂型角搜索和最小奇异值优化A*路径规划算法,提高机械臂避障、避奇异能力,机械臂操作的灵活性和路径的安全可靠性;同时根据路径优化策略,有效平滑了路径,减少了机械臂的磨损.仿真结果说明了该方法的有效性.


2019, 45(6): 1111-1121.
doi: 10.16383/j.aas.2018.c170647
摘要:
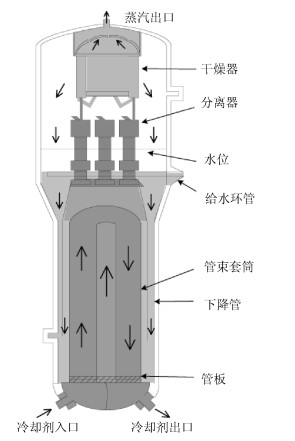
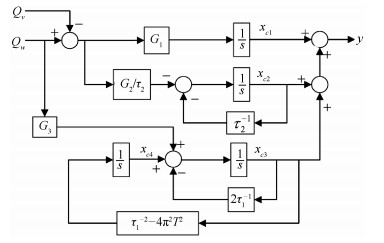
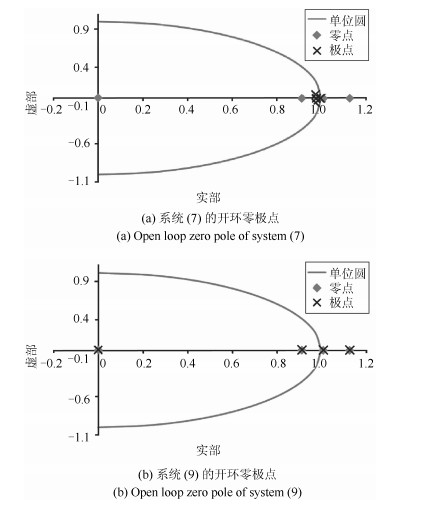
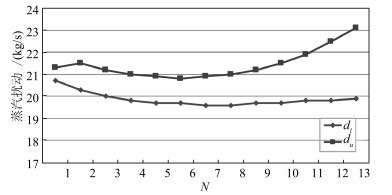
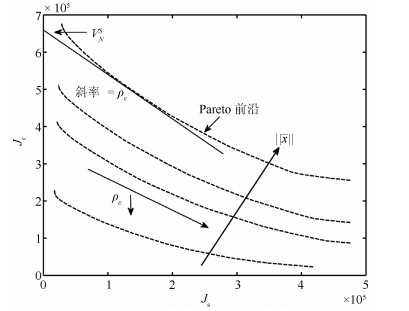
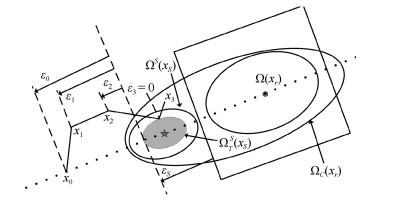
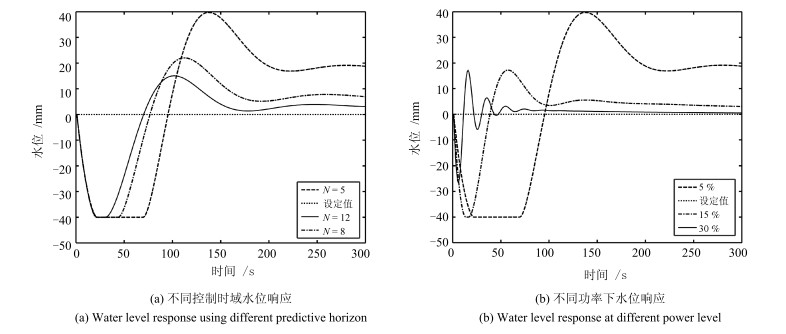
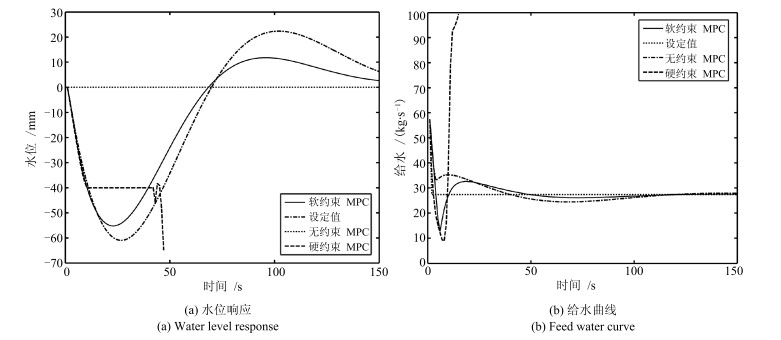
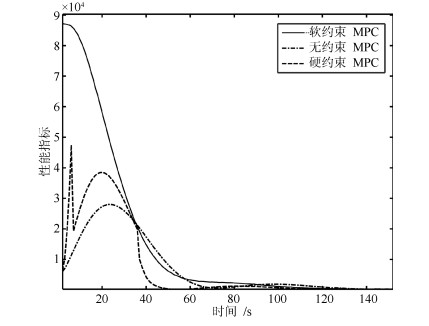
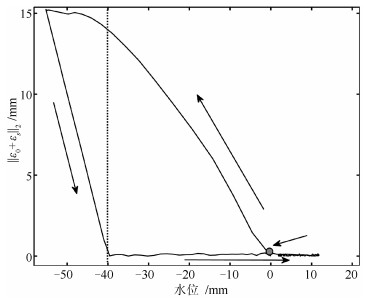
核电站的蒸汽发生器(U-tube steam generator,UTSG)水位控制对核反应堆安全运行至关重要.模型预测控制(Model predictive control,MPC)具有内在的约束处理能力,是UTSG水位控制的有效方法.然而在大范围变功率情况下,水位硬约束会降低水位的控制性能,甚至导致系统不稳定.本文基于UTSG的分段线性输入输出模型,设计了水位软约束MPC.离线计算终端约束集,减少在线计算量,保证稳定性;引入两种松弛变量来放宽水位约束和终端约束集;在蒸汽流量扰动和功率变化情况下的仿真结果表明了算法的有效性.
核电站的蒸汽发生器(U-tube steam generator,UTSG)水位控制对核反应堆安全运行至关重要.模型预测控制(Model predictive control,MPC)具有内在的约束处理能力,是UTSG水位控制的有效方法.然而在大范围变功率情况下,水位硬约束会降低水位的控制性能,甚至导致系统不稳定.本文基于UTSG的分段线性输入输出模型,设计了水位软约束MPC.离线计算终端约束集,减少在线计算量,保证稳定性;引入两种松弛变量来放宽水位约束和终端约束集;在蒸汽流量扰动和功率变化情况下的仿真结果表明了算法的有效性.



2019, 45(6): 1122-1135.
doi: 10.16383/j.aas.c180202
摘要:
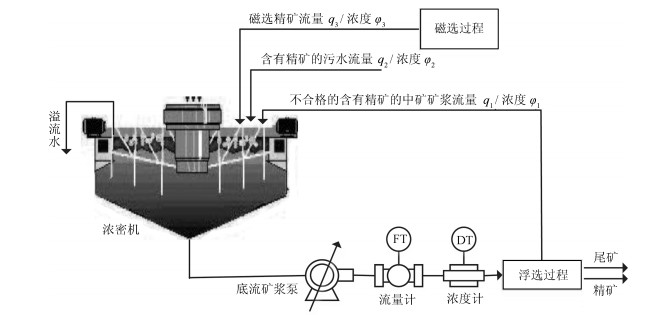
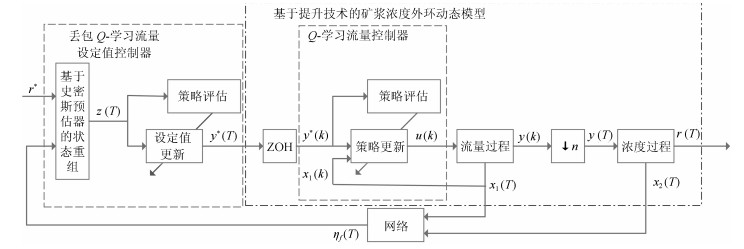
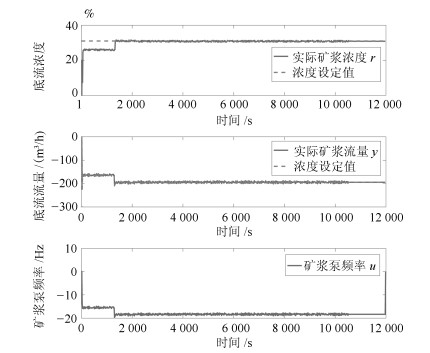
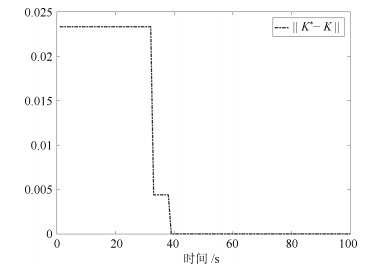
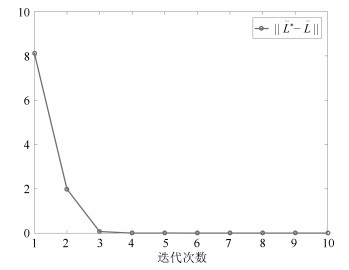
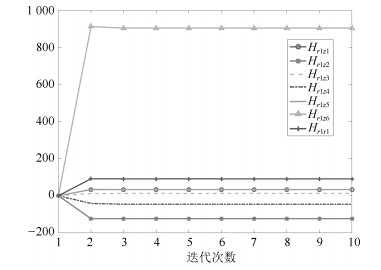
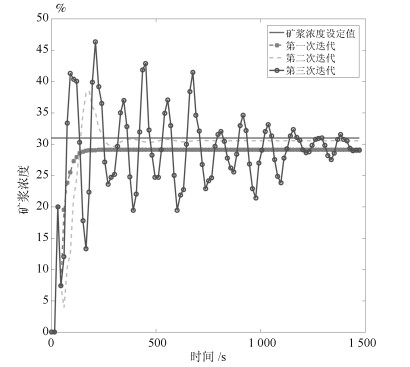
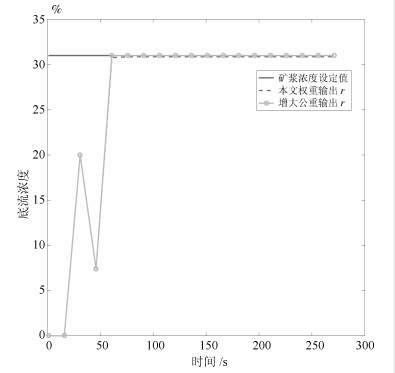
无线网络环境下赤铁矿混合选别浓密过程控制问题是以底流矿浆泵频率为内环输入,以底流矿浆流量为内环输出外环输入,以底流矿浆浓度为外环输出的非线性串级工业过程控制问题.其外环反馈回路存在丢包,且模型参数难以辨识,故本文利用工业运行过程的在线数据,设计不依赖模型参数的跟踪控制器.首先,利用浓密过程运行在工作点附近的特点进行线性化,对流量过程设计Q-学习控制器,保证流量过程能够跟踪给定的流量设定值;然后采用提升技术,得到统一时间尺度的以底流矿浆流量设定值为输入,以底流矿浆浓度为输出的被控对象;最后,考虑到在无线网络环境下浓度过程存在反馈丢包,当前的状态可能无法获得,故采用史密斯预估器的思想,利用历史的数据估计系统当前的状态,设计丢包Q-学习设定值控制器为流量过程提供最优设定值.通过仿真实验验证所提算法的有效性.
无线网络环境下赤铁矿混合选别浓密过程控制问题是以底流矿浆泵频率为内环输入,以底流矿浆流量为内环输出外环输入,以底流矿浆浓度为外环输出的非线性串级工业过程控制问题.其外环反馈回路存在丢包,且模型参数难以辨识,故本文利用工业运行过程的在线数据,设计不依赖模型参数的跟踪控制器.首先,利用浓密过程运行在工作点附近的特点进行线性化,对流量过程设计Q-学习控制器,保证流量过程能够跟踪给定的流量设定值;然后采用提升技术,得到统一时间尺度的以底流矿浆流量设定值为输入,以底流矿浆浓度为输出的被控对象;最后,考虑到在无线网络环境下浓度过程存在反馈丢包,当前的状态可能无法获得,故采用史密斯预估器的思想,利用历史的数据估计系统当前的状态,设计丢包Q-学习设定值控制器为流量过程提供最优设定值.通过仿真实验验证所提算法的有效性.


2019, 45(6): 1136-1145.
doi: 10.16383/j.aas.c180288
摘要:
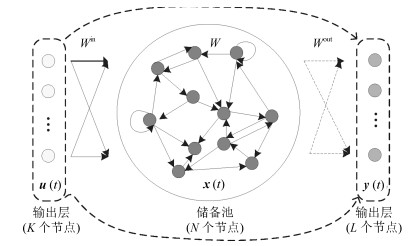
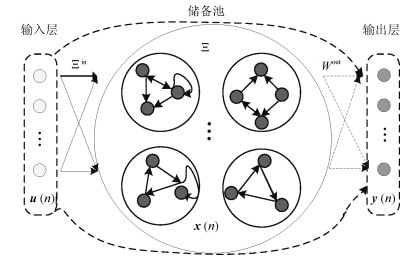
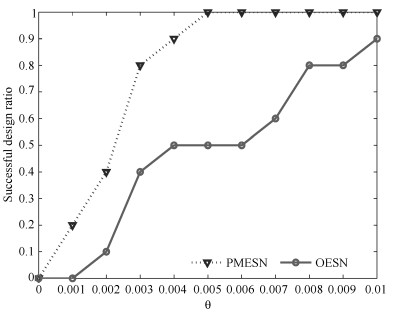
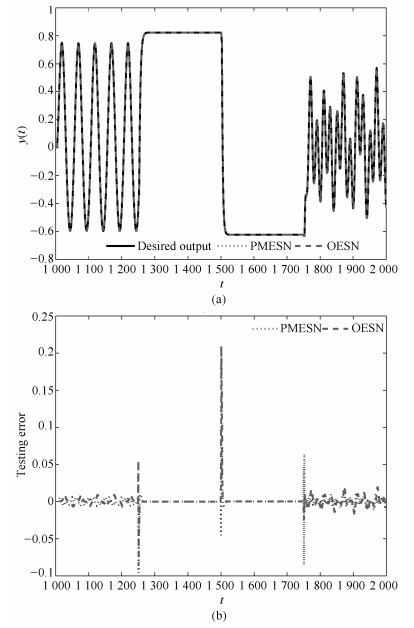
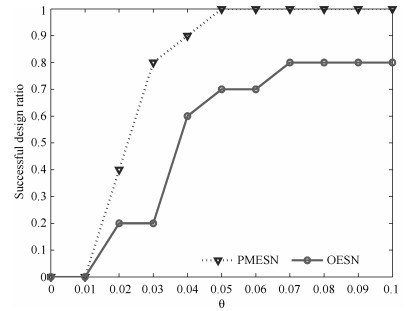
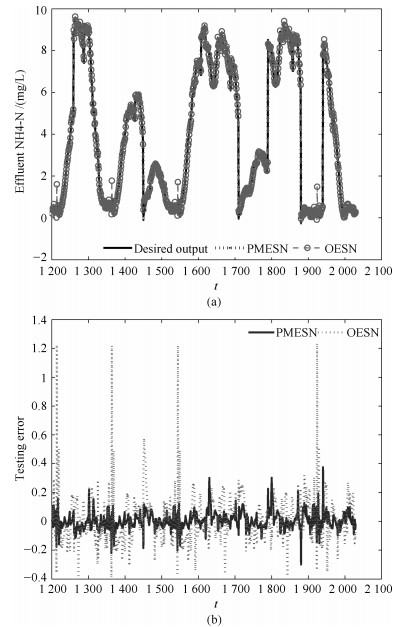
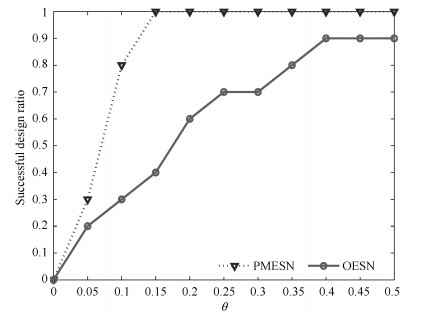
针对回声状态网络(Echo state network,ESN)的结构设计问题,提出基于灵敏度分析的模块化回声状态网络修剪算法(Pruning algorithm for modular echo state network,PMESN).该网络由相互独立的子储备池模块构成.首先利用矩阵的奇异值分解(Singular value decomposition,SVD)构造子储备池模块的权值矩阵,并利用分块对角阵原理生成储备池.然后利用子储备池模块输出和相应的输出层权值向量,定义学习残差对于子储备池模块的灵敏度以及网络规模适应度.利用灵敏度大小判断子储备池模块的贡献度,并根据网络规模适应度确定子储备池模块的个数,删除灵敏度低的子模块.在网络的修剪过程中,不需要缩放权值就可以保证网络的回声状态特性.实验结果说明,所提出的算法有效解决了ESN的网络结构设计问题,基本能够确定与样本数据相匹配的网络规模,具有较好的泛化能力和鲁棒性.
针对回声状态网络(Echo state network,ESN)的结构设计问题,提出基于灵敏度分析的模块化回声状态网络修剪算法(Pruning algorithm for modular echo state network,PMESN).该网络由相互独立的子储备池模块构成.首先利用矩阵的奇异值分解(Singular value decomposition,SVD)构造子储备池模块的权值矩阵,并利用分块对角阵原理生成储备池.然后利用子储备池模块输出和相应的输出层权值向量,定义学习残差对于子储备池模块的灵敏度以及网络规模适应度.利用灵敏度大小判断子储备池模块的贡献度,并根据网络规模适应度确定子储备池模块的个数,删除灵敏度低的子模块.在网络的修剪过程中,不需要缩放权值就可以保证网络的回声状态特性.实验结果说明,所提出的算法有效解决了ESN的网络结构设计问题,基本能够确定与样本数据相匹配的网络规模,具有较好的泛化能力和鲁棒性.

2019, 45(6): 1146-1156.
doi: 10.16383/j.aas.2018.c170583
摘要:
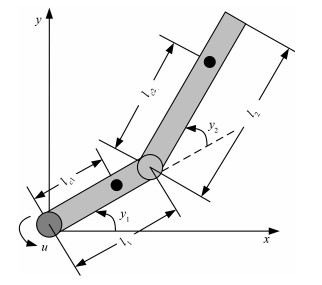
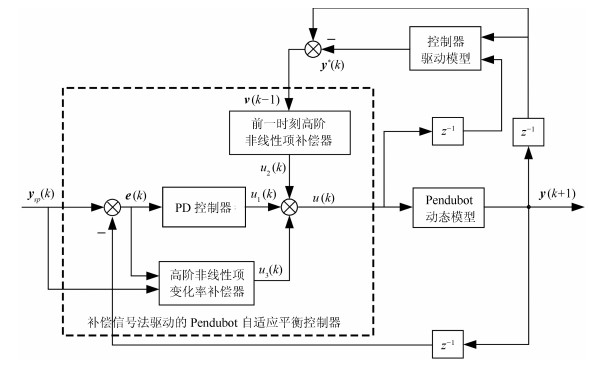
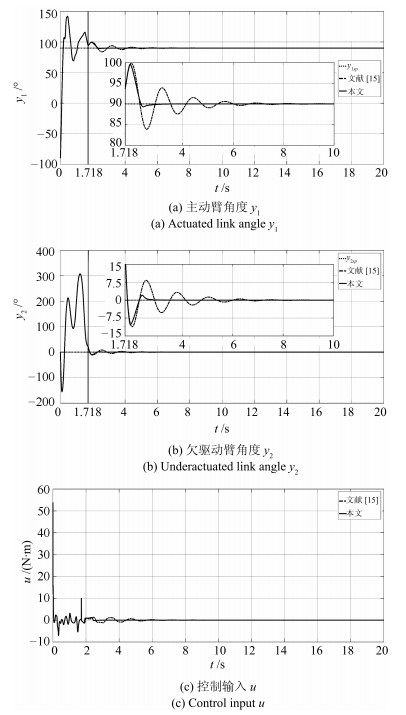
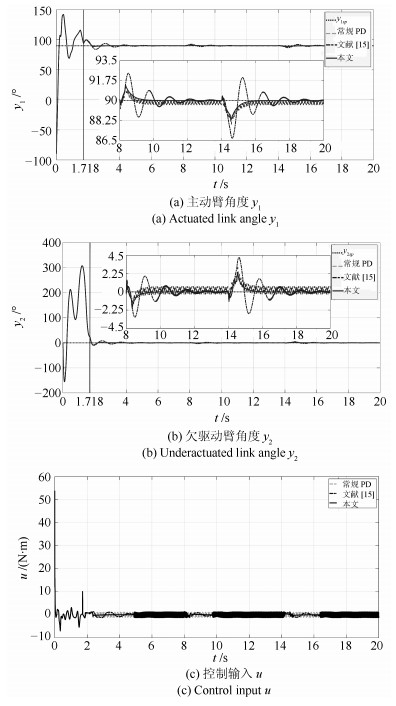
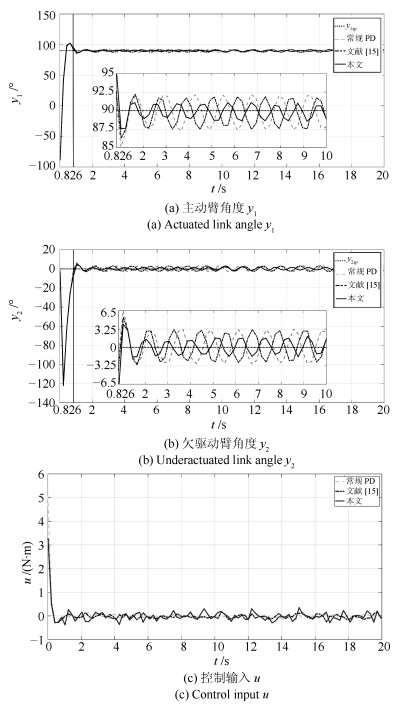
Pendubot是以电机转矩为输入,主动臂角度和欠驱动臂角度为输出的强非线性、多变量、欠驱动机械系统,受到具有时变不确定性的摩擦影响,且模型参数随摆臂质量与长度的改变而变化.本文将上述被控对象采用确定线性模型与未知高阶非线性项来描述,设计消除前一时刻高阶非线性项及其变化率对系统输出影响的补偿器,叠加于基于确定线性模型设计的PD控制器,提出了补偿信号法驱动的自适应平衡控制方法,并对所提方法进行了稳定性和收敛性分析.仿真和物理对比实验表明,当Pendubot系统模型参数改变时,所提控制算法可以有效地消除摩擦的影响,将两摆臂输出角度稳定在目标位置.
Pendubot是以电机转矩为输入,主动臂角度和欠驱动臂角度为输出的强非线性、多变量、欠驱动机械系统,受到具有时变不确定性的摩擦影响,且模型参数随摆臂质量与长度的改变而变化.本文将上述被控对象采用确定线性模型与未知高阶非线性项来描述,设计消除前一时刻高阶非线性项及其变化率对系统输出影响的补偿器,叠加于基于确定线性模型设计的PD控制器,提出了补偿信号法驱动的自适应平衡控制方法,并对所提方法进行了稳定性和收敛性分析.仿真和物理对比实验表明,当Pendubot系统模型参数改变时,所提控制算法可以有效地消除摩擦的影响,将两摆臂输出角度稳定在目标位置.


2019, 45(6): 1157-1165.
doi: 10.16383/j.aas.c180334
摘要:
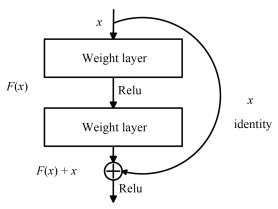
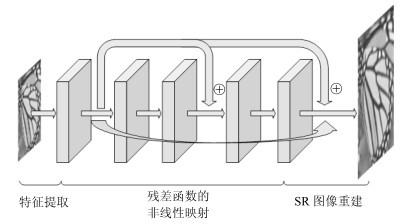
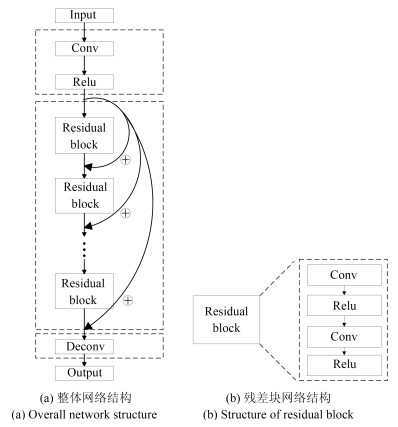
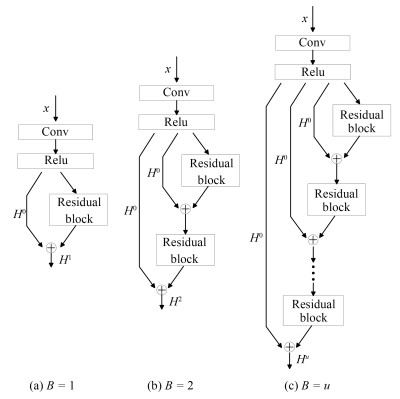
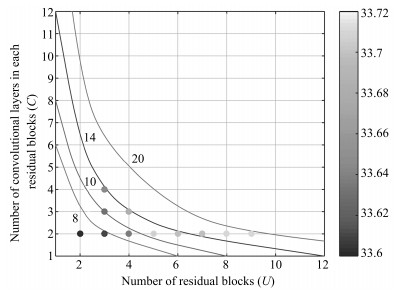
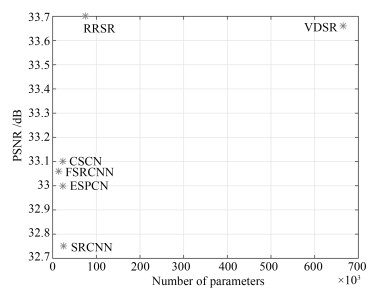
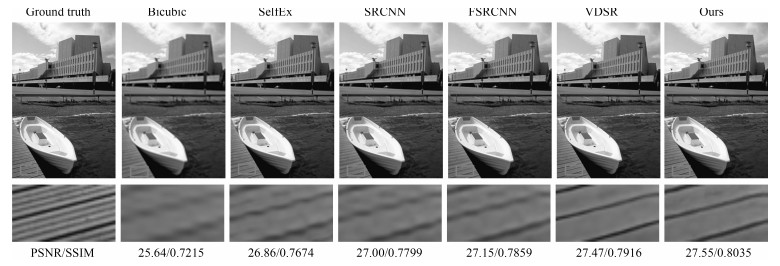
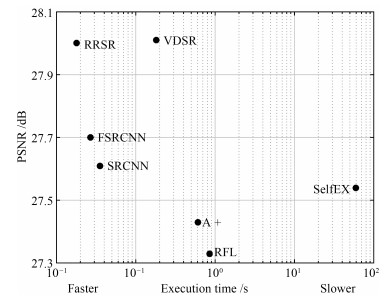
深度卷积神经网络在单图像超分辨率重建方面取得了卓越成就,但其良好表现通常以巨大的参数数量为代价.本文提出一种简洁紧凑型递归残差网络结构,该网络通过局部残差学习减轻训练深层网络的困难,引入递归结构保证增加深度的同时控制模型参数数量,采用可调梯度裁剪方法防止产生梯度消失/梯度爆炸,使用反卷积层在网络末端直接上采样图像到超分辨率输出图像.基准测试表明,本文在重建出同等质量超分辨率图像的前提下,参数数量及计算复杂度分别仅为VDSR方法的1/10和1/(2n2).
深度卷积神经网络在单图像超分辨率重建方面取得了卓越成就,但其良好表现通常以巨大的参数数量为代价.本文提出一种简洁紧凑型递归残差网络结构,该网络通过局部残差学习减轻训练深层网络的困难,引入递归结构保证增加深度的同时控制模型参数数量,采用可调梯度裁剪方法防止产生梯度消失/梯度爆炸,使用反卷积层在网络末端直接上采样图像到超分辨率输出图像.基准测试表明,本文在重建出同等质量超分辨率图像的前提下,参数数量及计算复杂度分别仅为VDSR方法的1/10和1/(2n2).

2019, 45(6): 1166-1176.
doi: 10.16383/j.aas.2017.c170467
摘要:
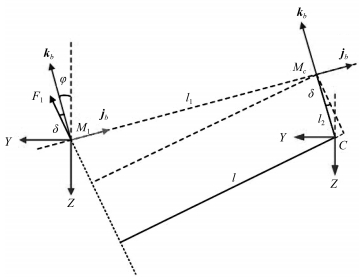
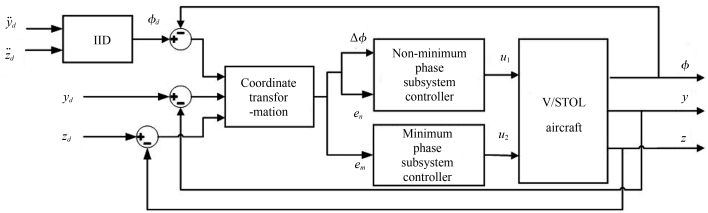
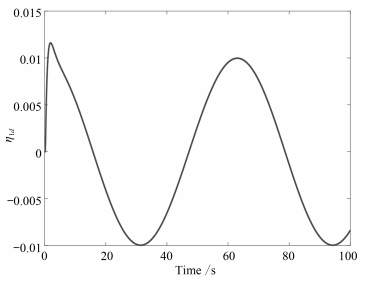
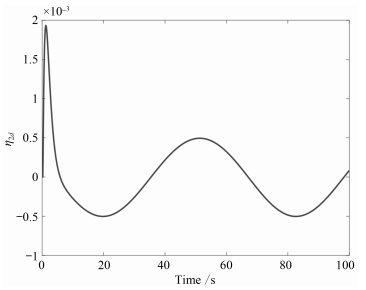
针对垂直/短距起降飞行器在悬停状态下滚转力矩与横侧向推力存在强耦合、系统具有非最小相位特性的问题,本文设计了轨迹跟踪控制器.首先利用坐标变换和输入输出线性化将系统分解成最小相位子系统和非最小相位子系统.对非最小相位子系统,采用稳态系统中心的方法求解理想内部动态,并跟踪系统理想内模设计了LQR控制器,使得内部动态有界;对最小相位子系统设计了高增益控制器使得外部动态渐进稳定.仿真结果表明本文设计的控制器对给定轨迹和飞行器机动轨迹都有较好的跟踪效果,验证了控制器的有效性.
针对垂直/短距起降飞行器在悬停状态下滚转力矩与横侧向推力存在强耦合、系统具有非最小相位特性的问题,本文设计了轨迹跟踪控制器.首先利用坐标变换和输入输出线性化将系统分解成最小相位子系统和非最小相位子系统.对非最小相位子系统,采用稳态系统中心的方法求解理想内部动态,并跟踪系统理想内模设计了LQR控制器,使得内部动态有界;对最小相位子系统设计了高增益控制器使得外部动态渐进稳定.仿真结果表明本文设计的控制器对给定轨迹和飞行器机动轨迹都有较好的跟踪效果,验证了控制器的有效性.






2019, 45(6): 1177-1185.
doi: 10.16383/j.aas.2018.c170651
摘要:
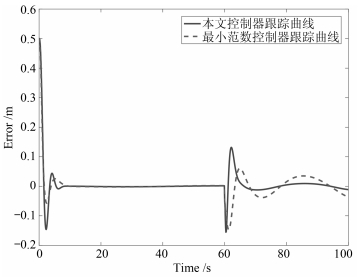
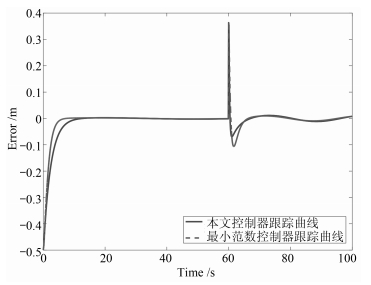
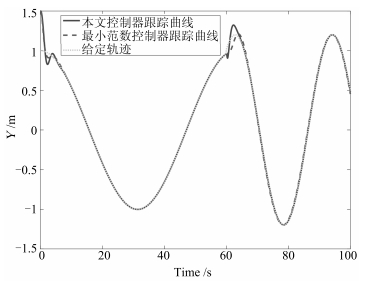
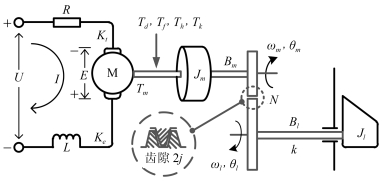
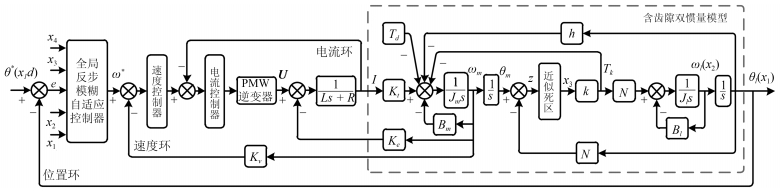
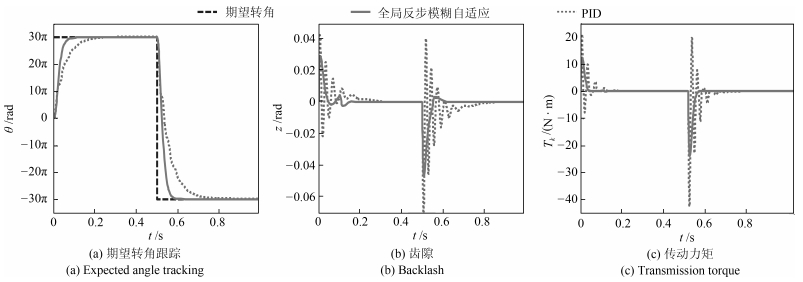
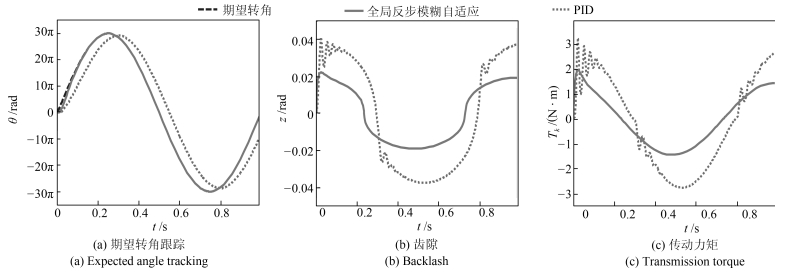
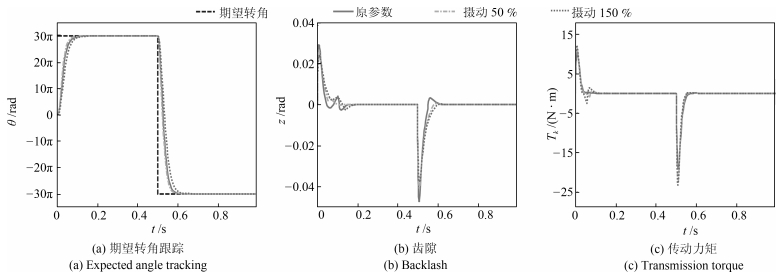
针对制导弹药电动舵机伺服系统中存在的齿隙、不确定参数及外部干扰,提出一种基于反步法的全局模糊自适应控制方法.首先,综合考虑上述非线性因素,分析描述齿隙的近似死区模型,建立含齿隙弹载舵机的双惯量机电模型,并将其引入采用"三闭环"结构的伺服系统中,构建非线性系统的状态空间;然后,采用模糊逻辑系统对齿隙等非线性因素进行自适应逼近与补偿控制,通过反步递推构造全系统Lyapunov函数,并运用Lyapunov第二法证明了整个闭环系统最终一致有界.仿真实验表明:较经典PID控制,该方法能更有效地削弱齿隙引起的传动力矩抖振与振荡冲击,既保证了系统的跟踪速度与控制精度,对不确定参数与外部干扰也具有较强的鲁棒性.
针对制导弹药电动舵机伺服系统中存在的齿隙、不确定参数及外部干扰,提出一种基于反步法的全局模糊自适应控制方法.首先,综合考虑上述非线性因素,分析描述齿隙的近似死区模型,建立含齿隙弹载舵机的双惯量机电模型,并将其引入采用"三闭环"结构的伺服系统中,构建非线性系统的状态空间;然后,采用模糊逻辑系统对齿隙等非线性因素进行自适应逼近与补偿控制,通过反步递推构造全系统Lyapunov函数,并运用Lyapunov第二法证明了整个闭环系统最终一致有界.仿真实验表明:较经典PID控制,该方法能更有效地削弱齿隙引起的传动力矩抖振与振荡冲击,既保证了系统的跟踪速度与控制精度,对不确定参数与外部干扰也具有较强的鲁棒性.
2019, 45(6): 1186-1197.
doi: 10.16383/j.aas.c170666
摘要:
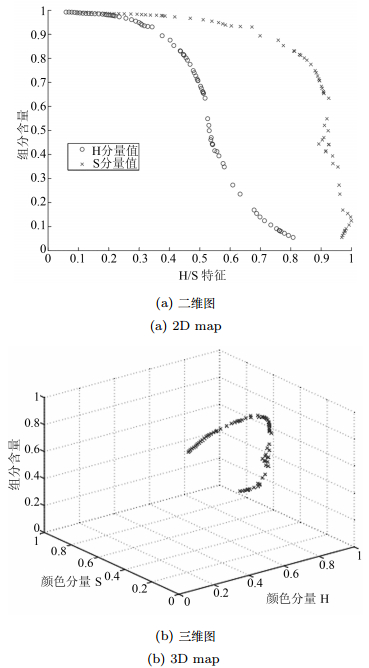
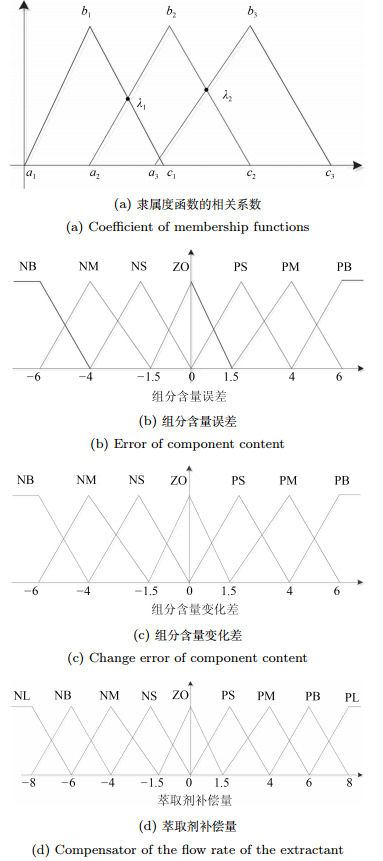
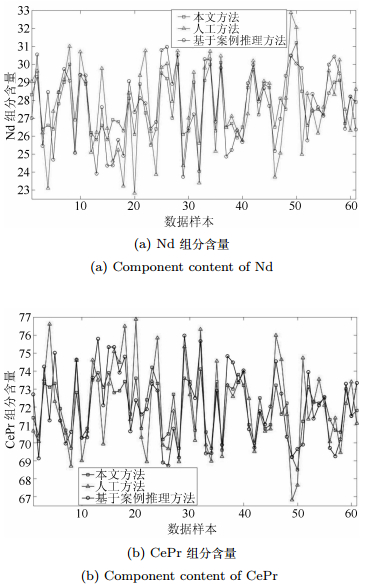
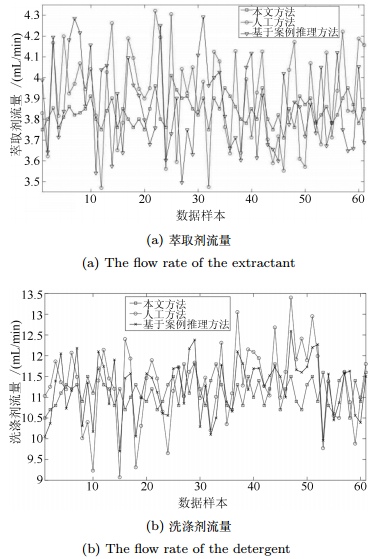
针对目前稀土铈镨/钕萃取生产过程人工控制导致生产指标波动大的问题,提出一种新的药剂量优化控制方法.首先针对入矿条件各参数的重要程度不一样,采用特征属性加权的案例推理方法确定药剂量(萃取量和洗涤量)预设定值;然后根据铈镨/钕稀土溶液颜色与组分含量密切相关的特点,采用最小二乘支持向量机(LS-SVM)建立基于稀土溶液颜色的组分含量软测量模型,再根据软测量得到的组分含量与目标组分含量的差值,采用模糊推理技术补偿药剂量预设定值,实现稀土萃取过程组分含量的动态优化控制.试验结果表明本文方法的有效性.
针对目前稀土铈镨/钕萃取生产过程人工控制导致生产指标波动大的问题,提出一种新的药剂量优化控制方法.首先针对入矿条件各参数的重要程度不一样,采用特征属性加权的案例推理方法确定药剂量(萃取量和洗涤量)预设定值;然后根据铈镨/钕稀土溶液颜色与组分含量密切相关的特点,采用最小二乘支持向量机(LS-SVM)建立基于稀土溶液颜色的组分含量软测量模型,再根据软测量得到的组分含量与目标组分含量的差值,采用模糊推理技术补偿药剂量预设定值,实现稀土萃取过程组分含量的动态优化控制.试验结果表明本文方法的有效性.




2019, 45(6): 1198-1206.
doi: 10.16383/j.aas.c180618
摘要:
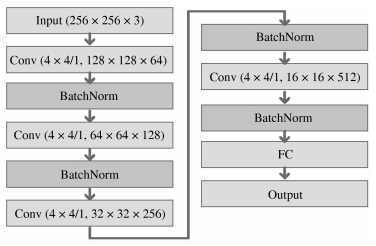
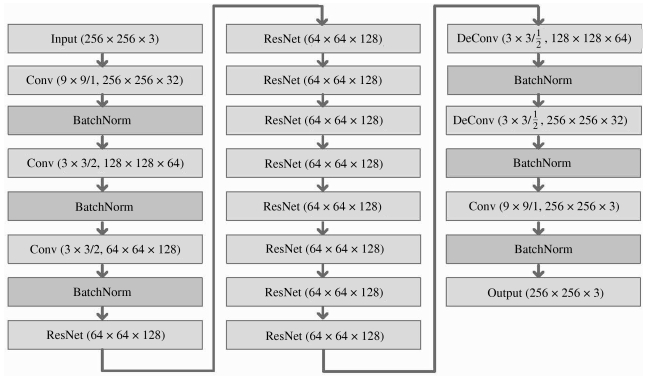
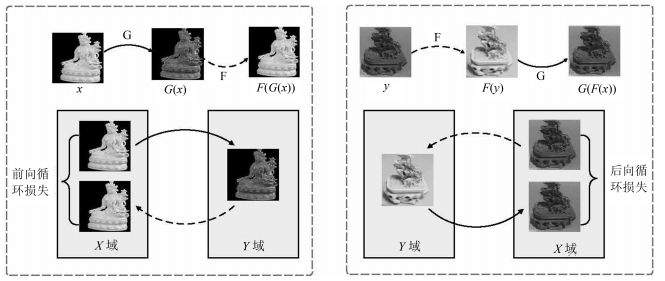
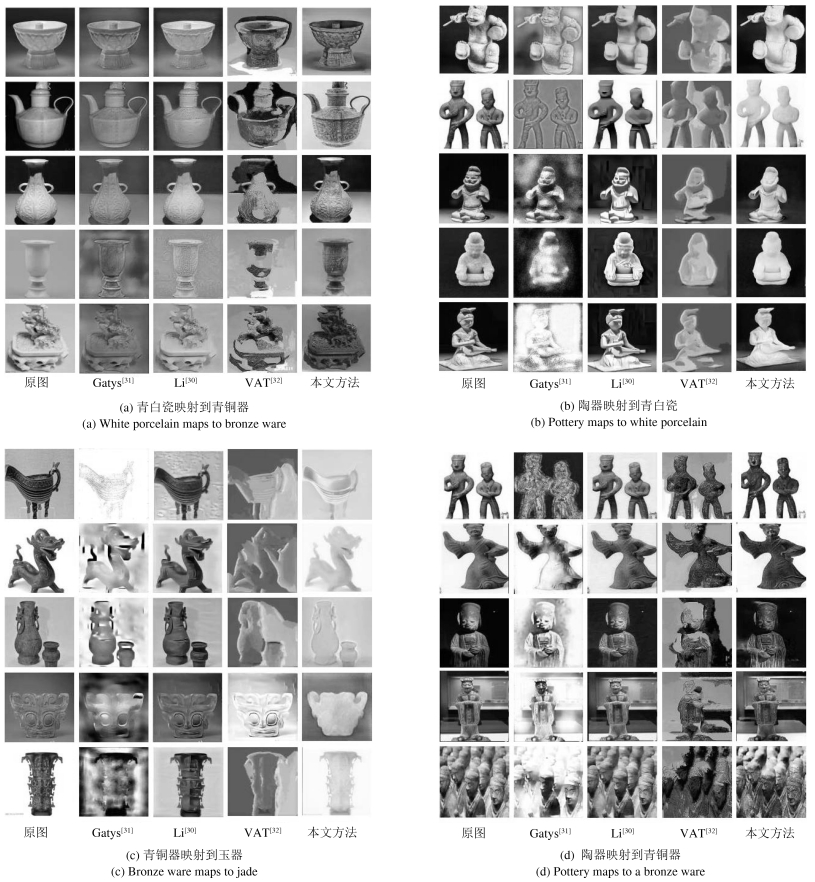
针对自然场景图像目标材质视觉特征映射中,尚存在特征提取困难、图像无对应标签等问题,本文提出了一种自然场景图像的目标材质视觉特征映射算法.首先,从图像中获取能表征材质视觉重要特征的反射层图像;然后,对获取的反射层图像进行前景、背景分割,得到目标图像;最后,利用循环生成对抗网络对材质视觉特征进行无监督学习,获得对图像目标材质视觉特征空间的高阶表达,实现了目标材质视觉特征的映射.实验结果表明,所提算法能够有效地获取自然场景图像目标的材质视觉特征,并进行材质视觉特征映射;与同类算法相比,具有更好的主、客观效果.
针对自然场景图像目标材质视觉特征映射中,尚存在特征提取困难、图像无对应标签等问题,本文提出了一种自然场景图像的目标材质视觉特征映射算法.首先,从图像中获取能表征材质视觉重要特征的反射层图像;然后,对获取的反射层图像进行前景、背景分割,得到目标图像;最后,利用循环生成对抗网络对材质视觉特征进行无监督学习,获得对图像目标材质视觉特征空间的高阶表达,实现了目标材质视觉特征的映射.实验结果表明,所提算法能够有效地获取自然场景图像目标的材质视觉特征,并进行材质视觉特征映射;与同类算法相比,具有更好的主、客观效果.