

Research of Visual H∞ Control of Inverted Pendulum With Time-varying Computational Time and Computational Error
-
摘要: 针对基于视觉传感的倒立摆实时控制系统中,通过每帧图像计算小车位移和摆杆偏角产生的时变计算时间和计算误差直接影响控制系统性能甚至导致系统失稳问题,不同于目前不考虑计算时间和计算误差或将计算时间视为定时滞进行研究倒立摆视觉实时控制方法,本文首先创新设计了新型的倒立摆视觉伺服控制实验平台,然后设计了一种基于事件触发机制的工业图像采集策略,提出了考虑小车和摆杆特征的小车位移和摆杆偏角计算方法,并统计分析了图像处理计算时间和计算误差特性;进一步建立了融合计算时间和计算误差的闭环控制系统模型,理论证明系统的稳定性并建立了反映计算时间与系统稳定性能之间关系,给出了系统对计算误差的H∞扰动抑制水平γ和控制器设计方法.最后,仿真和实时控制实验验证了所提方法可行且有效.Abstract: In visual-feedback-based real-time control of an inverted pendulum on a cart, some new challenges are as follows. On the one hand to get the values of cart position and pendulum angle from images needs more computation time. On the other hand, the values obtained have bigger errors than those in the traditional sensor approach. These will affect the system performance and even lead the system to instability. In this paper, we present an analytical study and experiments on:1) a novel platform; 2) event-triggered sampling and signal processing of the values from images, and statistical analysis of time-varying computational time and error; 3) modelling of a visual-based feedback closed-loop system; 4) conditions for system stability in terms of the statistics as described before; and 5) H∞ norm based controller design. At the end simulation and experiment are conducted to validate the design method.
-
Key words:
- Inverted pendulum /
- visual servoing /
- image processing /
- computational time /
- computational error
1) 本文责任编委 侯增广 -

图 1 倒立摆视觉伺服控制实验平台结构
Fig. 1 Scheme of inverted pendulum visual servoing control platform
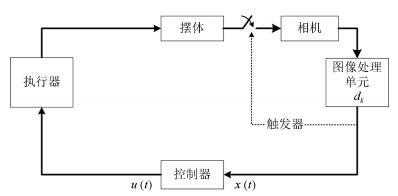
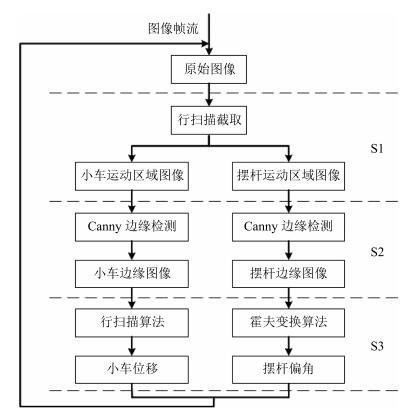
图 2 倒立摆视觉伺服控制系统控制框图
Fig. 2 Control block diagram of inverted pendulum visual servoing control system
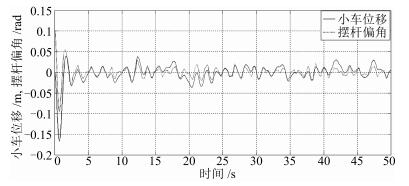
图 16 在控制律${K_1}$下的小车位移和摆杆偏角(仿真)
Fig. 16 Cart position and pendulum angle in controller ${K_1}$ (simulation)
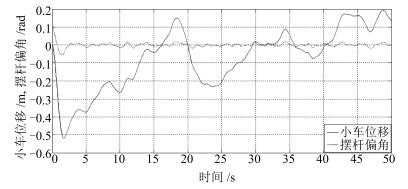
图 17 在控制律${K_2}$下的小车位移和摆杆偏角(仿真)
Fig. 17 Cart position and pendulum angle in controller ${K_2}$ (simulation)

图 18 在控制律${K_1}$下的小车位移和摆杆偏角(实时控制)
Fig. 18 Cart position and pendulum angle in controller ${K_1}$ (real-time control)

图 19 不同图像处理计算时间上界$\bar d$的小车位移
Fig. 19 Cart position in different upper bound of image processing computational time $\bar d$
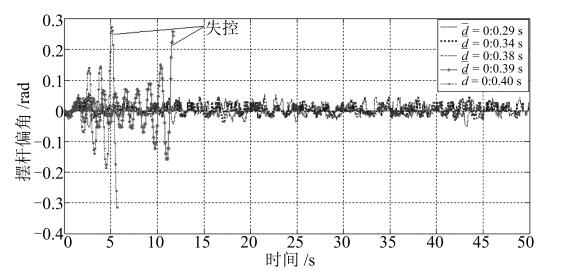
图 20 不同图像处理计算时间上界$\bar d$的摆杆偏角
Fig. 20 Pendulum angle in different upper bound of image processing computational time $\bar d$
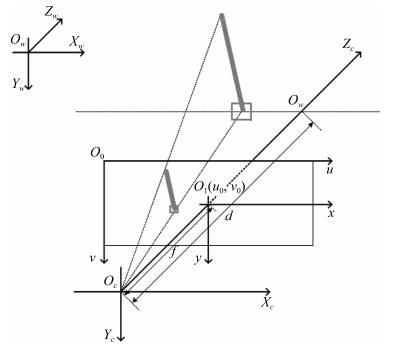
表 1 相机内部参数
Table 1 Intrinsic parameters of camera
参数 取值 $f$ 909.5 pixels $d$ 0.9263 m ${\alpha _u}$ $1.6241\times 106 $ pixels/m ${\alpha _v}$ $1.6241\times106 $ pixels/m $s$ 0 ${u_0}$ 334.85 pixels ${v_0}$ 267.46 pixels  下载: 导出CSV
下载: 导出CSV
-
[1] 王瑶为, 邢科新, 马剑, 张文安.直线一级倒立摆的自抗扰控制方法及实现.控制工程, 2017, 24(4):002 http://d.old.wanfangdata.com.cn/Periodical/jczdh201704002Wang Yao-Wei, Xing Ke-Xin, Ma Jian, Zhang Wen-An. Implementation and design of active disturbance rejection control for the linear inverted pendulum. Control Engineering of China, 2017, 24(4):002 http://d.old.wanfangdata.com.cn/Periodical/jczdh201704002 [2] Ronquillo-Lomeli G, Ríos-Moreno G J, Gómez-Espinosa A, Morales-Hernández L A, Perea M T. Nonlinear identification of inverted pendulum system using Volterra polynomials. Mechanics Based Design of Structures and Machines, 2016, 44(1-2):5-15 doi: 10.1080/15397734.2015.1028551 [3] Li Z J, Zhang Y N. Robust adaptive motion/force control for wheeled inverted pendulums. Automatica, 2010, 46(8):1346-1353 doi: 10.1016/j.automatica.2010.05.015 [4] Ravichandran M T, Mahindrakar A D. Robust stabilization of a class of underactuated mechanical systems using time scaling and Lyapunov redesign. IEEE Transactions on Industrial Electronics, 2011, 58(9):4299-4313 doi: 10.1109/TIE.2010.2102318 [5] 王忠杰, 谢璐璐.信息物理融合系统研究综述.自动化学报, 2011, 37 (10):1157-1166 http://www.aas.net.cn/CN/abstract/abstract17604.shtmlWang Zhong-Jie, Xie Lu-Lu. Cyber-physical systems:a survey. Acta Automatica Sinica, 2016, 37(10):1157-1166 http://www.aas.net.cn/CN/abstract/abstract17604.shtml [6] Bradley J M, Atkins E M. Toward continuous state-space regulation of coupled cyber-physical systems. Proceedings of the IEEE, 2012, 100(1):60-74 doi: 10.1109/JPROC.2011.2161239 [7] Ge X H, Yang F W, Han Q L. Distributed networked control systems:a brief overview. Information Sciences, 2017, 380:117-131 doi: 10.1016/j.ins.2015.07.047 [8] 张永立, 程会锋, 李洪兴.三级倒立摆的自动摆起与稳定控制.控制理论与应用, 2011, 28(1):37-45 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201101005Zhang Yong-Li, Cheng Hui-Feng, Li Hong-Xing. The swing-up and stabilization of the triple inverted pendulum. Control Theory and Applications, 2011, 28(1):37-45 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201101005 [9] 李雪冰, 马莉, 丁世宏.一类新的二阶滑模控制方法及其在倒立摆控制中的应用.自动化学报, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtmlLi Xue-Bing, Ma Li, Ding Shi-Hong. A new second-order sliding mode control and its application to inverted pendulum. Acta Automatica Sinica, 2015, 41(1):193-202 http://www.aas.net.cn/CN/abstract/abstract18598.shtml [10] 武玉强, 朱成龙.车轨长度受限的并行双摆能量控制.控制理论与应用, 2015, 32(9):1254-1260 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201509015Wu Yu-Qiang, Zhu Cheng-Long. Energy control for parallel-type double inverted pendulums with restricted cart rail length. Control Theory and Applications, 2015, 32(9):1254-1260 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201509015 [11] Muralidharan V, Mahindrakar A D. Position stabilization and waypoint tracking control of mobile inverted pendulum robot. IEEE Transactions on Control Systems Technology, 2014, 22(6):2360-2367 doi: 10.1109/TCST.2014.2300171 [12] Huang S H, Pan Y C. Automated visual inspection in the semiconductor industry:a survey. Computers in Industry, 2015, 66:1-10 doi: 10.1016/j.compind.2014.10.006 [13] 王耀南, 陈铁健, 贺振东, 吴成中.智能制造装备视觉检测控制方法综述.控制理论与应用, 2015, 32(3):273-286 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201503001Wang Yao-Nan, Chen Tie-Jian, He Zhen-Dong, Wu Cheng-Zhong. Review on the machine vision measurement and control technology for intelligent manufacturing equipment. Control Theory and Applications, 2015, 32(3):273-286 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201503001 [14] Riggio M, Sandak J, Franke S. Application of imaging techniques for detection of defects, damage and decay in timber structures on-site. Construction and Building Materials, 2015, 101:1241-1252 doi: 10.1016/j.conbuildmat.2015.06.065 [15] Gao J, Proctor A A, Shi Y, Bradley C. Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control. IEEE Transactions on Cybernetics, 2016, 46(10):2323-2334 doi: 10.1109/TCYB.2015.2475376 [16] Ye W Q, Li Z J, Yang C G, Sun J J, Su C Y, Lu R Q. Vision-based human tracking control of a wheeled inverted pendulum robot. IEEE Transactions on Cybernetics, 2016, 46(11):2423-2434 doi: 10.1109/TCYB.2015.2478154 [17] Wang H P, Vasseur C, Koncar V, Chamroo A, Christov N. Modelling and trajectory tracking control of a 2-DOF vision based inverted pendulum. Journal of Control Engineering and Applied Informatics, 2010, 12(3):59-66 [18] Magana M E, Holzapfel F. Fuzzy-logic control of an inverted pendulum with vision feedback. IEEE Transactions on Education, 1998, 41(2):165-170 doi: 10.1109/13.669727 [19] Tu Y W, Ho M T. Design and implementation of robust visual servoing control of an inverted pendulum with an FPGA-based image co-processor. Mechatronics, 2011, 21(7):1170-1182 doi: 10.1016/j.mechatronics.2011.07.011 [20] Kizir S, Ocak H, Bingul Z, Oysu C. Time delay compensated vision based stabilization control of an inverted pendulum. International Journal of Innovative Computing, Information and Control, 2012, 8(12):8133-8145 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cb3b1b8e6f3b7b2de73fe7983a59202d [21] Benitez-Morales A, Santos O, Romero H, Ramos-Velasco L E. Suboptimal robust linear visual servoing for a delayed underactuated system. Optimal Control Applications and Methods, 2013, 34(6):696-711 doi: 10.1002/oca.v34.6 [22] Van Hamme D, Goeman W, Veelaert P, Philips W. Robust monocular visual odometry for road vehicles using uncertain perspective projection. EURASIP Journal on Image and Video Processing, 2015, 2015:10 doi: 10.1186/s13640-015-0065-6 [23] Canny J. A computational approach to edge detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(6):679-698 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_3d39d0b11988c5f90bf44b10d764f020 [24] Liu M Q, Zhang X G, Zhang Y L, Lyu S. Calibration algorithm of mobile robot vision camera. International Journal of Precision Engineering and Manufacturing, 2016, 17(1):51-57 doi: 10.1007/s12541-016-0007-y [25] Xu Z Z, Shin B S, Klette R. Accurate and robust line segment extraction using minimum entropy with Hough transform. IEEE Transactions on Image Processing, 2015, 24(3):813-822 doi: 10.1109/TIP.2014.2387020 [26] Xu S Y, Lam J, Zou Y. New results on delay-dependent robust H∞ control for systems with time-varying delays. Automatica, 2006, 42(2):343-348 doi: 10.1016/j.automatica.2005.09.013 [27] Gao H J, Wu J L, Shi P. Robust sampled-data H∞ control with stochastic sampling. Automatica, 2009, 45(7):1729-1736 doi: 10.1016/j.automatica.2009.03.004 [28] Yan H C, Qian F F, Zhang H, Yang F W, Guo G. H∞ fault detection for networked mechanical Spring-Mass systems with incomplete information. IEEE Transactions on Industrial Electronics, 2016, 63(9):5622-5631 doi: 10.1109/TIE.2016.2559454 [29] Jiang X S, Tian X M, Zhang T L, Zhang W H. Quadratic stabilizability and H∞ control of linear discrete-time stochastic uncertain systems. Asian Journal of Control, 2017, 19(1):35-46 doi: 10.1002/asjc.v19.1 [30] Han Q L. Absolute stability of time-delay systems with sector-bounded nonlinearity. Automatica, 2005, 41(12):2171-2176 doi: 10.1016/j.automatica.2005.08.005 [31] Peng C, Tian Y C. Delay-dependent robust stability criteria for uncertain systems with interval time-varying delay. Journal of Computational and Applied Mathematics, 2008, 214(2):480-494 doi: 10.1016/j.cam.2007.03.009 -

 下载:
下载:







计量
- 文章访问数: 2733
- HTML全文浏览量: 412
- PDF下载量: 587
- 被引次数: 0
