

Position Time-varying Consensus Control for Multiple Planar Agents with Non-holonomic Constraint
-
摘要: 多智能体的通用一致性协议被广泛用于智能体的编队控制问题中.在实际工程中,多智能体系统为了完成期望的协作控制,智能体之间的位置关系通常是时变的.目前,在多智能体编队控制问题中,尽管已有研究成果能够解决多智能体某些特殊类型的时变编队控制,但对一般性的时变编队还没有成熟的研究成果.本文以受非完整性约束的平面多智能体为研究对象,提出了平面非完整性多智能体的位置时变一致性协议.实验结果表明:本文提出的位置时变一致性协议能够有效解决平面非完整性多智能体系统一般性的时变编队问题.Abstract: The general consensus protocol is widely used to solve multi-agent formation problems. In engineering applications, to achieve a desired coordination, the position relationship between agents is time-varying. Recently, various research results have been obtained on some special types of time-varying formations. However, solutions to a general time-variant formation problem are very few. Therefore, a position time-variant consensus protocol of planar multi-agent systems with non-holonomic constraints is presented. Experimental results show that the proposed position time-varying consensus protocol is able to effectively solve the general time-variant formation of planar multi-agent systems with non-holonomic constraints.1) 本文责任编委 吕金虎
-

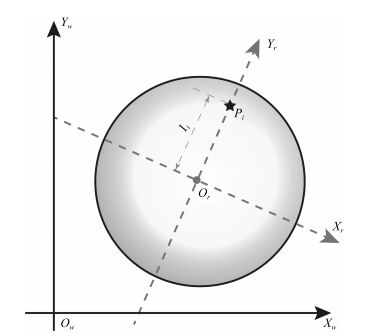
图 2 $λ_i(t)$ 与 $\widetilde{λ}_i(t)$ 近似关系示意图
Fig. 2 Diagram of approximate relationship between $λ_i(t)$ and $\widetilde{λ}_i(t)$
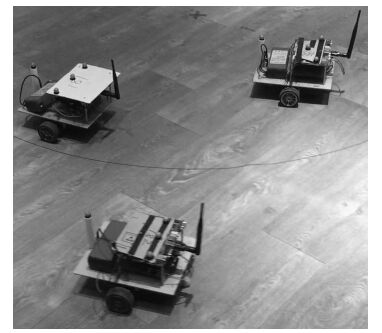
图 3 实验用差分驱动轮式机器人照片
Fig. 3 A photo of experimental differentially driven wheeled mobile robots
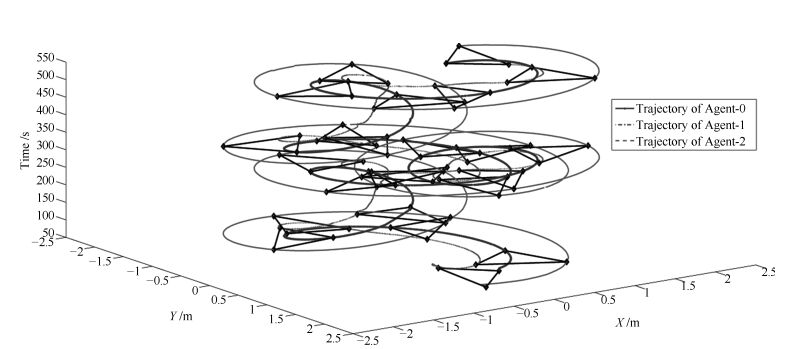
图 4 三角形编队实验中各智能体的运动轨迹
Fig. 4 Trajectories of agents in experiments presented in triangle formation
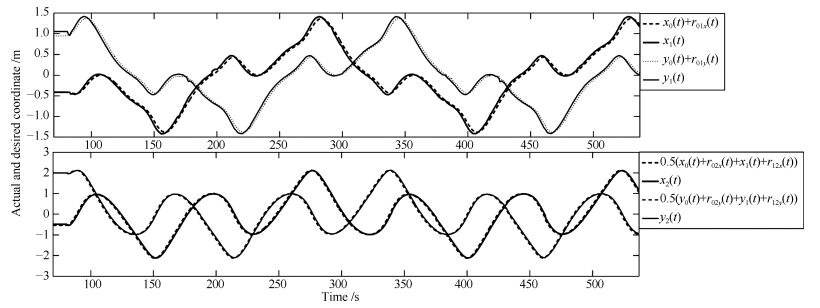
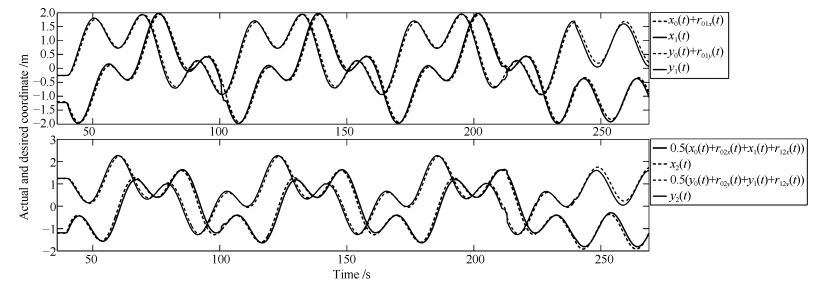
图 5 三角形编队实验中智能体 $1$ 和智能体 $2$ 对期望队形的跟踪效果
Fig. 5 Tracking performance of Agent $1$ and Agent $2$ in triangle formation experiment

图 6 环绕编队中各智能体的轨迹
Fig. 6 Trajectories of agents in the surrounding formation experiment
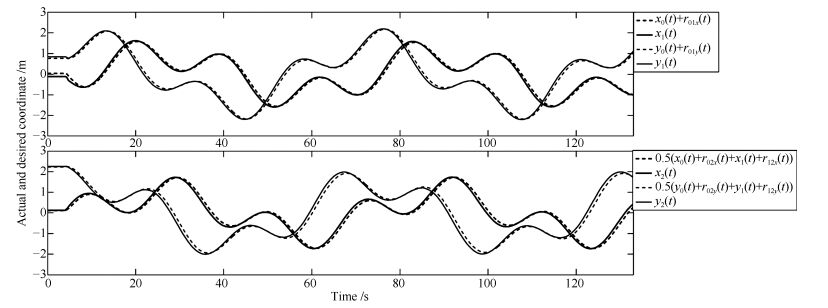
图 7 环绕编队中各智能体对期望的队形的跟踪性能
Fig. 7 Tracking performance of agents on desired formation in the surrounding formation experiment
-
[1] 张晓平, 阮晓钢, 肖尧, 朱晓庆.两轮机器人具有内发动机机制的感知运动系统的建立.自动化学报, 2016, 42(8):1175-1184 http://www.aas.net.cn/CN/abstract/abstract18907.shtmlZhang Xiao-Ping, Ruan Xiao-Gang, Xiao Yao, Zhu Xiao-Qing. Establishment of a two-wheeled robot's sensorimotor system with mechanism of intrinsic motivation. Acta Automatica Sinica, 2016, 42(8):1175-1184 http://www.aas.net.cn/CN/abstract/abstract18907.shtml [2] 董文杰, 霍伟.受非完整约束移动机器人的跟踪控制.自动化学报, 2000, 26(1):1-6 http://www.aas.net.cn/CN/abstract/abstract16055.shtmlDong Wen-Jie, Huo Wei. Tracking control of mobile robots with nonholonomic constraint. Acta Automatica Sinica, 2000, 26(1):1-6 http://www.aas.net.cn/CN/abstract/abstract16055.shtml [3] 闵海波, 刘源, 王仕成, 孙富春.多个体协调控制问题综述.自动化学报, 2012, 38(10):1557-1570 http://www.aas.net.cn/CN/abstract/abstract17765.shtmlMin Hai-Bo, Liu Yuan, Wang Shi-Cheng, Sun Fu-Chun. An overview on coordination control problem of multi-agent system. Acta Automatica Sinica, 2012, 38(10):1557-1570 http://www.aas.net.cn/CN/abstract/abstract17765.shtml [4] Velasco-Villa M, Castro-Linares R, Rosales-Hernández F, del Muro-Cuéllar B, Hernández-Pérez M A. Discrete-time synchronization strategy for input time-delay mobile robots. Journal of the Franklin Institute, 2013, 350(10):2911-2935 doi: 10.1016/j.jfranklin.2013.05.029 [5] Rosales-Hernández F, Velasco-Villa M, Castro-Linares R, del Muro-Cuéllar B, Hernández-Pérez M Á. Synchronization strategy for differentially driven mobile robots:discrete-time approach. International Journal of Robotics and Automation, 2015, 30(1):50-59 https://www.researchgate.net/profile/Rafael_Castro-Linares/publication/277941042_Synchronization_strategy_for_differentially_driven_mobile_robots_Discrete-time_approach/links/5604293608aea25fce30b9f2.pdf?origin=publication_list [6] Dong W J, Djapic V. Leader-following control of multiple nonholonomic systems over directed communication graphs. International Journal of Systems Science, 2016, 47(8):1877-1890 doi: 10.1080/00207721.2014.955553 [7] Peng Z X, Yang S C, Wen G G, Rahmani A, Yu Y G. Adaptive distributed formation control for multiple nonholonomic wheeled mobile robots. Neurocomputing, 2016, 173(P3):1485-1494 https://www.researchgate.net/publication/282409600_Adaptive_Distributed_Formation_Control_for_Multiple_Nonholonomic_Wheeled_Mobile_Robots [8] Cepeda-Gomez R, Perico L F. Formation control of nonholonomic vehicles under time delayed communications. IEEE Transactions on Automation Science and Engineering, 2015, 12(3):819-826 doi: 10.1109/TASE.2015.2424252 [9] Dong X W, Zhou Y, Ren Z, Zhong Y S. Time-varying formation control for unmanned aerial vehicles with switching interaction topologies. Control Engineering Practice, 2016, 46:26-36 doi: 10.1016/j.conengprac.2015.10.001 [10] Wang R, Dong X W, Li Q D, Ren Z. Distributed adaptive time-varying formation for multi-agent systems with general high-order linear time-invariant dynamics. Journal of the Franklin Institute, 2016, 353(10):2290-2304 doi: 10.1016/j.jfranklin.2016.03.016 [11] Bai J, Wen G G, Rahmani A, Chu X, Yu Y G. Consensus with a reference state for fractional-order multi-agent systems. International Journal of Systems Science, 2016, 47(1):222-234 doi: 10.1080/00207721.2015.1056273 [12] Wang C, Sun D. A synchronous controller for multiple mobile robots in time-varied formations. In:Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France:IEEE, 2008. 2765-2770 [13] Brinon-Arranz L, Seuret A, Canudas-de-Wit C. Cooperative control design for time-varying formations of multi-agent systems. IEEE Transactions on Automatic Control, 2014, 59(8):2283-2288 doi: 10.1109/TAC.2014.2303213 [14] Ferrers N M. Extension of Lagrange's equations. Journal of Pure and Applied Mathematics, 1872, 12(45):1-5 http://www.ams.org/bull/1932-38-02/S0002-9904-1932-05342-3/S0002-9904-1932-05342-3.pdf [15] Khooban M H. Design an intelligent proportional-derivative (PD) feedback linearization control for nonholonomic-wheeled mobile robot. Journal of Intelligent & Fuzzy Systems, 2014, 26(4):1833-1843 https://www.deepdyve.com/lp/ios-press/design-an-intelligent-proportional-derivative-pd-feedback-xTHDTVhiJw [16] Oriolo G, De Luca A, Vendittelli M. WMR control via dynamic feedback linearization:design, implementation, and experimental validation. IEEE Transactions on Control Systems Technology, 2002, 10(6):835-852 doi: 10.1109/TCST.2002.804116 [17] Rudra S, Barai R K, Maitra M. Design and implementation of a block-backstepping based tracking control for nonholonomic wheeled mobile robot. International Journal of Robust and Nonlinear Control, 2016, 26(14):3018-3035 doi: 10.1002/rnc.3485 [18] Velazquez M, Cruz D, Garcia S, Bandala M. Velocity and motion control of a self-balancing vehicle based on a cascade control strategy. International Journal of Advanced Robotic Systems, 2016, 13(3):Article No.1061 http://www.intechopen.com/journals/statistics/international_journal_of_advanced_robotic_systems/velocity-and-motion-control-of-a-self-balancing-vehicle-based-on-a-cascade-control-strategy [19] Wikipedia. Breadth-first/search[Online], available:https://en.wikipedia.org/wiki/Breadth-first_search, November 10, 2016. [20] Zhao J, Liu G P. Model-based remote control of nonholonomic wheeled robot with time delay and packet loss in forward channel. In:Proceedings of the 2015 Chinese Automation Congress. Wuhan, China:IEEE, 2015. 1669-1704 -

 下载:
下载:
计量
- 文章访问数: 2898
- HTML全文浏览量: 358
- PDF下载量: 850
- 被引次数: 0
