

-
摘要: 提出一种新的非线性滤波器应用于磁偶极子目标跟踪问题.建立了跟踪问题的状态空间模型, 在此基础上, 从高斯矩近似误差的角度分析了现有卡尔曼滤波更新在磁偶极子跟踪中的问题.对此, 将贝叶斯更新过程等效为求解连续时间上的渐进贝叶斯问题, 在线性高斯条件下推导了其解析解, 表明渐进贝叶斯更新可等效为定常系统的Kalman-Bucy滤波器; 进一步采用一阶Taylor展开得到非线性近似解表达式, 导出一种渐进贝叶斯滤波器, 从理论上分析了与现有方法的异同.仿真与实测磁目标跟踪试验结果表明, 渐进贝叶斯滤波器具有良好的精度和收敛性, 能够有效抑制磁目标跟踪中由于大初始误差导致的性能下降和滤波发散, 且计算效率与扩展卡尔曼滤波器相当, 适于实际应用.Abstract: A nonlinear filter is proposed for magnetic dipole tracking. A state-space model of magnetic dipole target is established. The difficulty of ordinary Kalman type measurement update is analyzed in a perspective of the error existing in typical Gaussian moment approximation strategies. In this regard, the traditional Bayesian update in discrete-time is reformulated to a continuous progressive Bayesian problem, and the analytical solution is derived under linear Gaussian condition. It is shown that the linear Gaussian progressive Bayesian update is naturally interpreted as a Kalman-Bucy filter for non-stochastic constant estimation. Further, the first-order approximation using Taylor series expansion is applied to a derived nonlinear progress Bayesian filter (PBF), and theoretical comparison with the existing method is presented. Simulation and real-world magnetic dipole tracking experiments are performed to demonstrate the effectiveness of PBF. Both results suggest that our filter not only effectively suppresses the performance degeneration and filter divergence caused by large initialization error, but also has straightforward implementation resembling that of extended Kalman filter, which is suitable for practical magnetic dipole tracking application.
-
Key words:
- Magnetic dipole /
- tracking /
- state-space model /
- nonlinear
-
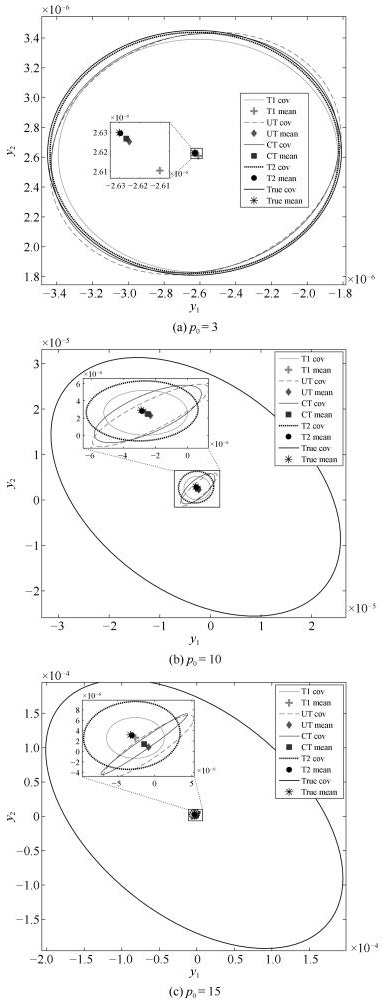
图 1 不同初始误差条件下先验观测矩近似结果
Fig. 1 Prior moment approximation under different initial error covariance
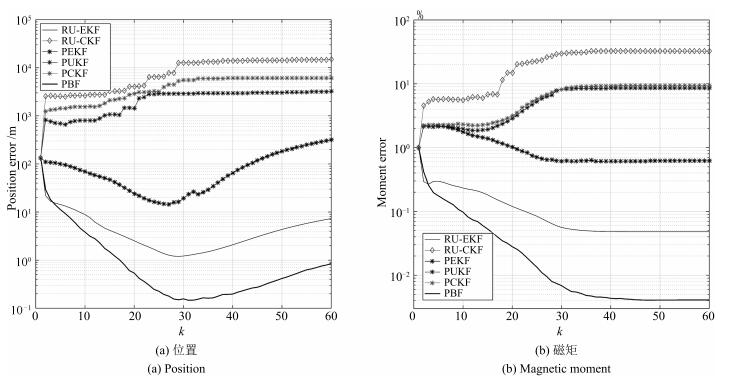
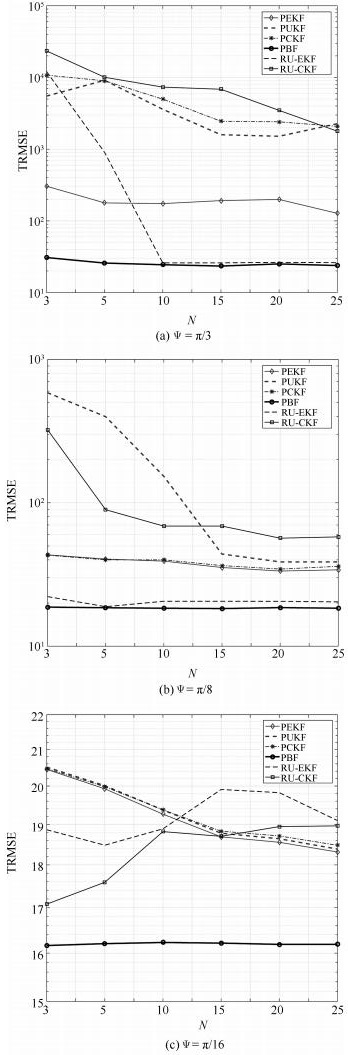
图 2 位置分量与磁矩分量估计RMSE(ψ=π/3)
Fig. 2 RMSE of position and magnetic moment estimation(ψ=π/3)
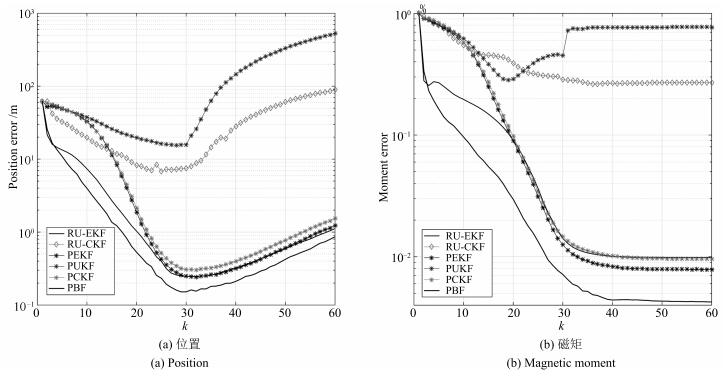
图 3 位置分量与磁矩分量估计RMSE(ψ=π/8)
Fig. 3 RMSE of position and magnetic moment estimation(ψ=π/8)
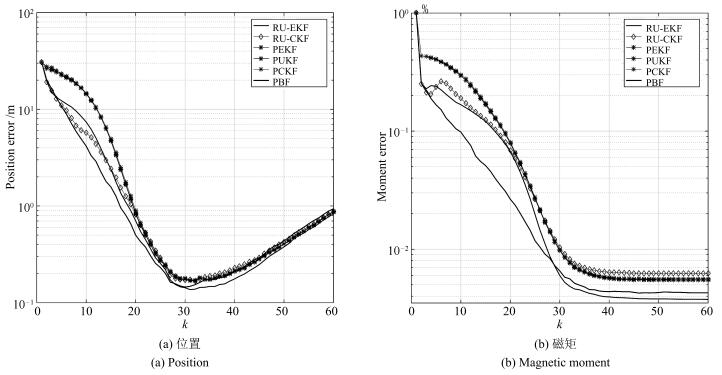
图 4 位置分量与磁矩分量估计RMSE(ψ=π/16)
Fig. 4 RMSE of position and magnetic moment estimation(ψ=π/16)
表 1 仿真场景参数
Table 1 Parameter of simulation scenario
参数(单位) 量值 r0(m) [-150, -150, 50]T v0(m/s) [8, 8, 0.6]T M0(A·m2) 10^6·[6.0, -9.0, 9.0]T V(m3) 103 o1, 2(m) [-60, ±6, 10]T TN, Ts(s) 60, 0.5  下载: 导出CSV
下载: 导出CSV
表 2 滤波初始条件
Table 2 Filter initialization
参数 初值(${{{\mathit{\boldsymbol{\hat{x}}}}}_{0}}$) 初始均方误差(P0) ${{{\mathit{\boldsymbol{\hat{r}}}}}_{0}}$ R(ψn)·[-160, -160, { 40}]T ${{I}_{3\times 3}}{{{\mathit{\boldsymbol{\tilde{r}}}}}_{0}}{{I}_{3\times 3}}{{{\mathit{\boldsymbol{\tilde{r}}}}}_{0}}$ ${{{\mathit{\boldsymbol{\hat{v}}}}}_{0}}$ [5, 5, 0.2]T diag{22, 22, 22} ${{{\mathit{\boldsymbol{\hat{M}}}}}_{0}}$ [0, 0, 0]T diag{1013, 1013, 1013} ${\hat{V}}$ 0 2·103
下载: 导出CSV
表 3 归一化后验残差平方和
Table 3 Normalized posterior residual square
r* 试验1 试验2 RU-EKF 1.913×105 7.908×105 RU-CKF 2.286×105 1.363×106 PEKF 1.891×105 2.142×105 PUKF 2.076×105 8.071×107 PCKF 2.188×106 2.424×109 PBF 1.746×105 1.703×105
下载: 导出CSV
-
[1] McAulay A. Computerized model demonstrating magnetic submarine localization. IEEE Transactions on Aerospace and Electronic Systems, 1977, AES-13(3): 246-254 doi: 10.1109/TAES.1977.308392 [2] McFee J E, Das Y, Ellingson R O. Locating and identifying compact ferrous objects. IEEE Transactions on Geoscience and Remote Sensing, 1990, 28(2): 182-193 doi: 10.1109/36.46697 [3] Pham D M, Aziz S M. A real-time localization system for an endoscopic capsule using magnetic sensors. Sensors, 2014, 14(11): 20910-20929 doi: 10.3390/s141120910 [4] Birsan M. Recursive Bayesian method for magnetic dipole tracking with a tensor gradiometer. IEEE Transactions on Magnetics, 2011, 47(2): 409-415 doi: 10.1109/TMAG.2010.2091964 [5] Wahlström N. Target Tracking Using Maxwell0s Equations. [Master dissertation], Linköping University, Sweden, 2010 [6] 宋宇, 孙富春, 李庆玲.移动机器人的改进无迹粒子滤波蒙特卡罗定位算法.自动化学报, 2010, 36(6): 851-857 http://www.aas.net.cn/CN/abstract/abstract13665.shtmlSong Yu, Sun Fu-Chun, Li Qing-Ling. Mobile robot Monte Carlo localization based on improved unscented particle filter. Acta Automatica Sinica, 2010, 36(6): 851-857 http://www.aas.net.cn/CN/abstract/abstract13665.shtml [7] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269 doi: 10.1109/TAC.2009.2019800 [8] Wahlström N, Gustafsson F. Magnetometer modeling and validation for tracking metallic targets. IEEE Transactions on Signal Processing, 2014, 62(3): 545-556 doi: 10.1109/TSP.2013.2274639 [9] Andrews A P. Method of Estimating Location and Orientation of Magnetic Dipoles Using Extended Kalman Filtering and Schweppe Likelihood Ratio Detection, U. S. Patent 5381095, January 1995. [10] 姚振宁, 刘大明, 刘道胜, 朱兴乐.基于不敏粒子滤波的水中非合作磁性目标实时磁定位方法.物理学报, 2014, 63(22): 309-314 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201422042.htmYao Zhen-Ning, Liu Da-Ming, Liu Sheng-Dao, Zhu XingLe. A real-time magnetic localization method of underwater non-cooperative magnetic targets based on unscented particle filter. Acta Physica Sinica, 2014, 63(22): 309-314 http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201422042.htm [11] Bar-Shalom Y, Li X R, Kirubarajan T. Estimation with Applications to Tracking and Navigation. New York: John Wiley & Sons, 2001. [12] Zhang K. A new GPS/RFID integration algorithm based on iterated reduced sigma point Kalman filter for vehicle navigation. In: Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation. Seattle, USA: The Institute of Navigation, 2009. 1604-1611 [13] Zhan R H, Wan J W. Iterated unscented Kalman filter for passive target tracking. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3): 1155-1163 doi: 10.1109/TAES.2007.4383605 [14] Zanetti R. Adaptable recursive update filter. Journal of Guidance, Control, & Dynamics, 2015, 38(7): 1295-1300 [15] Huang Y L, Zhang Y G, Li N, Zhao L. Design of sigma-point Kalman filter with recursive updated measurement. Circuits, Systems, & Signal Processing, 2016, 35(5): 1767-1782 [16] Huang Y L, Zhang Y G, Li N, Zhao L. Gaussian approximate filter with progressive measurement update. In: Proceedings of the 54th Annual Conference on Decision and Control. Osaka, Japan: IEEE, 2015. 4344-4349 [17] Daum F, Huang J. Nonlinear filters with particle flow induced by log-homotopy. In: Proceedings of the 2009 SPIE 7336, Signal Processing, Sensor Fusion, and Target Recognition XVIII. Orlando, Florida, USA: SPIE, 2009. DOI: 10.1117/12.814241 [18] Daum F, Huang J, Noushin A. Coulomb0s law particle flow for nonlinear filters. In: Proceedings of the 2011 SPIE 8137, Signal and Data Processing of Small Targets. San Diego, USA: SPIE, 2011. DOI: 10.1117/12.887514 [19] Charalampidis D, Jilkov V P, Wu J D. Implementation and performance of FPGA-accelerated particle flow filter. In: Proceedings of SPIE 9596, Signal and Data Processing of Small Targets. San Diego, California, United States: SPIE, 2015. DOI: 10.1117/12.2179546 [20] Yang T, Laugesen R S, Mehta P G, Meyn S P. Multivariable feedback particle filter. Automatica, 2016, 71: 10-23 doi: 10.1016/j.automatica.2016.04.019 [21] 彭孝东, 张铁民, 李继宇, 陈瑜.基于传感器校正与融合的农用小型无人机姿态估计算法.自动化学报, 2015, 41(4): 854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtmlPeng Xiao-Dong, Zhang Tie-Min, Li Ji-Yu, Chen Yu. Attitude estimation algorithm of agricultural small-UAV based on sensors fusion and calibration. Acta Automatica Sinica, 2015, 41(4): 854-860 http://www.aas.net.cn/CN/abstract/abstract18659.shtml [22] Gustafsson F, Hendeby G. Some relations between extended and unscented Kalman filters. IEEE Transactions on Signal Processing, 2012, 60(2): 545-555 doi: 10.1109/TSP.2011.2172431 [23] Perea L, How J, Breger L, Elosegui P. Nonlinearity in sensor fusion: divergence issues in EKF, modified truncated SOF, and UKF. In: Proceedings of the 2007 AIAA Guidance, Navigation and Control Conference and Exhibit. South Carolina, USA: AIAA, 2007. DOI: 10.2514/6.2007-6514 [24] Morelande M R, García-Fernáandez A F. Analysis of Kalman filter approximations for nonlinear measurements. IEEE Transactions on Signal Processing, 2013, 61(22): 5477-5484 doi: 10.1109/TSP.2013.2279367 [25] Jazwinski A H. Stochastic Processes and Filtering Theory. New York: Academic Press, 1970. [26] 李杰, 陈建兵.随机动力系统中的概率密度演化方程及其研究进展.力学进展, 2010, 40(2): 170-188 doi: 10.6052/1000-0992-2010-2-J2009-105Li Jie, Chen Jian-Bing. Advances in the research on probability density evolution equations of stochastic dynamical systems. Advances in Mechanics, 2010, 40(2): 170-188 doi: 10.6052/1000-0992-2010-2-J2009-105 [27] Simon D. Optimal State Estimation. New York: John Wiley & Sons, 2006. 234 [28] Berntorp K. Feedback Particle Filter: Application and Evaluation, Technical Report TR2015-074, Mitsubishi Electric Research Laboratories, USA, 2015. -

 下载:
下载:


计量
- 文章访问数: 3460
- HTML全文浏览量: 398
- PDF下载量: 633
- 被引次数: 0
