

-
摘要: 对动态双足机器人的可控周期步态的稳定性、鲁棒性和优化控制策略的国内外研究现状与发展趋势进行了探讨.首先,介绍动态双足机器人的动力学数学模型,进一步,提出动态双足机器人运动步态和控制系统原理;其次,讨论动态双足机器人可控周期步态稳定性现有的研究方法,分析这些方法中存在的缺点与不足;再次,研究动态双足机器人的可控周期步态优化控制策略,阐明各种策略的优缺点;最后,给出动态双足机器人研究领域的难点问题和未来工作,展望动态双足机器人可控周期步态与鲁棒稳定性及其应用的研究思路.Abstract: For the controllable periodic gait of dynamic walking bipedal robots, properties such as stabilities, robustness and optimal control strategies, and research status and development trend at home and abroad are explored in this paper. First of all, we introduce the dynamics mathematical model of the dynamic biped robot and present locomotion gait and control system theory for the dynamic walking bipedal robots. Secondly, we discuss the current research methods of controllable periodic gait stability for the dynamic walking bipedal robots and analyze the shortcomings of these methods; we also describe the controllable gait cycle optimization control strategy and illuminate both advantages and disadvantages of various strategies. Finally, we present challenges and future works for the dynamic biped robot research areas and give the idea of robust stability and the controllable gait cycle.
-

图 4 神经网络的模型预测控制框图
Fig. 4 Block diagram of model predictive control with neural network controller

图 5 中枢神经发生器(CPG)控制框图
Fig. 5 Block diagram of central pattern generator (CPG)controller
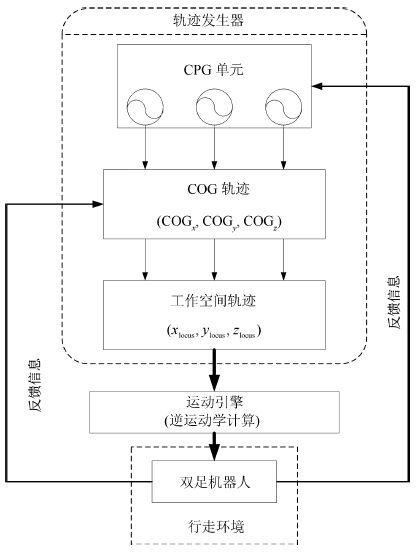
图 6 中枢神经发生器(CPG)+COG控制框图
Fig. 6 Block diagram of central pattern generator(CPG)+COG controller

图 8 组合虚拟约束和混合零动态的控制框图
Fig. 8 Block diagram of virtual constraint with hybrid zero dynamic controller
-
[1] Goswami A, Espiau B, Keramane A. Limit cycles in a passive compass gait biped and passivity-mimicking control laws. Autonomous Robots, 1997, 4(3):273-286 doi: 10.1023/A:1008844026298 [2] Collins S, Ruina A, Tedrake R, Wisse M. Efficient bipedal robots based on passive-dynamic walkers. Science, 2005, 307(5712):1082-1085 doi: 10.1126/science.1107799 [3] Alexander R M. Walking made simple. Science, 2005, 308(5718):58-59 http://cn.bing.com/academic/profile?id=1567923375&encoded=0&v=paper_preview&mkt=zh-cn [4] Kuo A D. Harvesting energy by improving the economy of human walking. Science, 2005, 309(5714):1686-1687 http://science.sciencemag.org/content/309/5741/1686 [5] Wisse M, Keliksdal G, van Frankenhyyzen J, Moyer B. Passive-based walking robot. IEEE Transactions on Robotics and Automation Magazine, 2007, 14(2):52-62 doi: 10.1109/MRA.2007.380639 [6] Hobbelen D, de Boer T, Wisse M. System overview of bipedal robots flame and TUlip:tailor-made for limit cycle walking. In:Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France:IEEE, 2008.2486-2491 [7] Karssen J D, Wisse M. Running with improved disturbance rejection by using non-linear leg springs. The International Journal of Robotics Research, 2011, 30(13):1585-1595 doi: 10.1177/0278364911408631 [8] Bhounsule P A, Cortell J, Ruina A. Design and control of ranger:an energy-efficient, dynamic walking robot. In:Proceedings of the 15th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines. Baltimore, Maryland, USA:World Scientific Publishing Co. Pte Ltd., 2012.441-448 [9] Park H W, Sreenath K, Jonathan W H, Grizzle J W. Identification of a bipedal robot with a compliant drivetrain. IEEE Control Systems, 2011, 31(2):63-88 doi: 10.1109/MCS.2010.939963 [10] Buss B G, Ramezani A, Hamed K A, Grffin B A, Galloway K S, Grizzle J W. Preliminary walking experiments with underactuated 3D bipedal robot MARLO. In:Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago, IL:IEEE, 2014.2529-2536 [11] Kuindersma S, Deits R, Fallon M, Valenzuela A, Dai H K, Permenter F, Marion P, Tedrake R. Optimization-based locomotion planning, estimation, and control design for the atlas humanoid robot. Autonomous Robots, 2016, 40(3):429-455 doi: 10.1007/s10514-015-9479-3 [12] 宫赤坤, 黄成林, 张智斌, 蓝黎恩. 仿人双足机器人上楼梯仿真研究. 现代制造工程, 2013, (8):108-112 http://www.cnki.com.cn/Article/CJFDTOTAL-XXGY201308027.htmGong Chi-Kun, Huang Cheng-Lin, Zhang Zhi-Bin, Lan Li-En. Simulation research of humanoid bipedal robot upstairs. Modern Manufacturing Engineering, 2013, (8):108-112 http://www.cnki.com.cn/Article/CJFDTOTAL-XXGY201308027.htm [13] 宋宪玺, 周烽, 梁青, 王永. 双足机器人上楼梯步态的规划与控制. 计算机仿真, 2011, 28(4):176-180 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201104046.htmSong Xian-Xi, Zhou Feng, Liang Qing, Wang Yong. Gait planning and control of a biped robot climbing upstairs. Computer Simulation, 2011, 28(4):176-180 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201104046.htm [14] Westervelt E R, Grizzle J W, Chevallereau C, Choi J H, Morris B. Feedback Control of Dynamic Bipedal Robot Locomotion. Boca Raton:CRC Press, 2007.19-20 [15] Grizzle J W, Abba G, Plestan F. Asymptotically stable walking for biped robots:analysis via systems with impulse effects. IEEE Transactions on Automatic Control, 2001, 46(1):51-64 doi: 10.1109/9.898695 [16] Fu C L, Chen K. Section-map stability criterion for biped robots part Ⅰ:theory. In:Proceedings of the 2007 International Conference on Mechatronics and Automation. Harbin, China:IEEE, 2007.1529-1534 [17] Ames A D, Galloway K, Sreenath K, Grizzle J W. Rapidly exponentially stabilizing control Lyapunov functions and hybrid zero dynamics. IEEE Transactions on Automatic Control, 2014, 59(4):876-891 doi: 10.1109/TAC.2014.2299335 [18] Orlov Y, Aoustin Y, Chevallereau C. Finite time stabilization of a perturbed double integrator——part Ⅰ:continuous sliding mode-based output feedback synthesis. IEEE Transactions on Automatic Control, 2011, 56(3):614-618 doi: 10.1109/TAC.2010.2090708 [19] Lamperski A, Ames A D. Lyapunov theory for Zeno stability. IEEE Transactions on Automatic Control, 2013, 58(1):100-112 doi: 10.1109/TAC.2012.2208292 [20] Hürmüzlü Y, Moskowitz G D. Bipedal locomotion stabilized by impact and switching:Ⅰ. Two-and three-dimensional, three-element models Ⅱ. Structural stability analysis of a four element bipedal locomotion model. Dynamics and Stability of Systems, 1987, 2(2):73-112 doi: 10.1007%2Fs11044-009-9185-z [21] Westervelt E R, Buche G, Grizzle J W. Experimental validation of a framework for the design of controllers that induce stable walking in planar bipeds. The International Journal of Robotics Research, 2004, 23(6):559-582 doi: 10.1177/0278364904044410 [22] Liu L M, Tian Y T. Switch control between different speeds for a passive dynamic walker. International Journal of Advanced Robotic Systems, 2012, 9:241 http://cn.bing.com/academic/profile?id=2142112651&encoded=0&v=paper_preview&mkt=zh-cn [23] 刘德君, 田彦涛. 双足步行机器人能量成型控制. 控制理论与应用, 2012, 29(10):1301-1308 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201210008.htmLiu De-Jun, Tian Yan-Tao. Energy shaping control of biped walking robot. Control Theory and Applications, 2012, 29(10):1301-1308 http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201210008.htm [24] Nguyen Q, Sreenath K. L1 adaptive control for bipedal robots with control Lyapunov function based quadratic programs. In:Proceedings of the 2015 American Control Conference. Chicago, IL:IEEE, 2015.862-867 [25] Orlov Y. Finite time stability and robust control synthesis of uncertain switched systems. SIAM Journal on Control and Optimization, 2004, 43(4):1253-1271 doi: 10.1137/S0363012903425593 [26] Aoustin Y, Chevallereau C, Orlov Y. Finite time stabilization of a perturbed double integrator——part Ⅱ:applications to bipedal locomotion. In:Proceedings of the 49th IEEE Conference of Decision and Control. Atlanta, GA:IEEE, 2010.3554-3559 [27] Oza H B, Orlov Y V, Spurgeon S K, Aoustin Y, Chevallereau C. Finite time tracking of a fully actuated biped robot with pre-specified settling time:a second order sliding mode synthesis. In:Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China:IEEE, 2014.2570-2575 [28] Oza H B, Orlov Y V, Spurgeon S K, Aoustin Y, Chevallereau C. Continuous second order sliding mode based robust finite time tracking of a fully actuated biped robot. In:Proceedings of the 2014 European Control Conference. Strasbourg, France:IEEE, 2014.2600-2605 [29] Or Y, Ames A D. Stability and completion of Zeno equilibria in Lagrangian hybrid systems. IEEE Transactions on Automatic Control, 2011, 56(6):1322-1336 doi: 10.1109/TAC.2010.2080790 [30] Or Y, Teel A R. Zeno stability of the set-valued bouncing ball. IEEE Transactions on Automatic Control, 2011, 56(2):447-452 doi: 10.1109/TAC.2010.2090411 [31] Goebel R, Teel A R. Solutions to hybrid inclusions via set and graphical convergence with stability theory applications. Automatica, 2006, 42(4):573-587 doi: 10.1016/j.automatica.2005.12.019 [32] Ames A D. Characterizing knee-bounce in bipedal robotic walking:a Zeno behavior approach. In:Proceedings of the 14th International Conference on Hybrid Systems:Computation and Control. New York, USA:ACM, 2011.163-172 [33] 胡峻峰, 曹军, 双足被动步行的全局稳定性分析. 计算机工程, 2015,41(2):173-177 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJC201502033.htmHu Jun-Feng, Cao Jun. Analysis for global stability of passive bipeds walking. Computer Engineering, 2015, 41(2):173-177 http://www.cnki.com.cn/Article/CJFDTOTAL-JSJC201502033.htm [34] MontañO E, Orlov Y, Aoustin Y. Nonlinear state feedback H_∞-control of mechanical systems under unilateral constraints. In:Proceedings of the 19th IFAC World Congress. Cape Town, South Africa:IFAC, 2014.3833-3838 [35] Dai H K, Tedrake R. Optimizing robust limit cycles for legged locomotion on unknown terrain. In:Proceedings of the 51st IEEE Conference on Decision and Control. Maui, HI, USA:IEEE, 2012.1207-1213 [36] Manchester I R, Mettin U, Iida F, Tedrake R. Stable dynamic walking over uneven terrain. The International Journal of Robotics Research, 2011, 30(3):265-279 doi: 10.1177/0278364910395339 [37] Dai H K, Tedrake R. L2-gain optimization for robust bipedal walking on unknown terrain. In:Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Karlsruhe, Germany:IEEE, 2013.3116-3123 [38] Gan C B, Ding C T, Yang S X. Dynamical analysis and performance evaluation of a biped robot under multi-source random disturbances. Acta Mechanica Sinica, 2014, 30(6):983-994 doi: 10.1007/s10409-014-0074-1 [39] Montano O, Orlov Y, Aoustin Y, Chevallereau C. Orbital stabilization of an underactuated bipedal gait via nonlinear H∞ control using measurement feedback. Autonomous Robots, DOI: 10.1007/s1054-015-9543-z [40] Hamed K A, Buss B G, Grizzle J W. Exponentially stabilizing continuous time controllers for periodic orbits of hybrid systems:application to bipedal locomotion with ground height variations. International Journal of Robotics Research, 2016, 35(8):977-999 doi: 10.1177/0278364915593400 [41] Hodgins J K, Raibert M N. Adjusting step length for rough terrain locomotion. IEEE Transactions on Robotics and Automation, 1991, 7(3):289-298 doi: 10.1109/70.88138 [42] Andrada E, Rode C, Blickhan R. Grounded running in quails:simulations indicate benefits of observed fixed aperture angle between legs before touch-down. Journal of Theoretical Biology, 2013, 335:97-107 doi: 10.1016/j.jtbi.2013.06.031 [43] Maus H M, Seyfarth A. Walking in circles:a modelling approach. Journal of the Royal Society Interface, 2014, 11(99), doi: 10.1098/rsif.2014.0594 [44] 李满天, 于海涛, 郭伟, 王鹏飞, 蔡鹤皋. 基于摄动理论的SLIP模型解析化研究及其运动控制. 机器人, 2012, 34(6):689-696 doi: 10.3724/SP.J.1218.2012.00689Li Man-Tian, Yu Hai-Tao, Guo Wei, Wang Peng-Fei, Cai He-Gao. Research on the analyticity of SLIP model based on perturbation theory and locomotion control. Robot, 2012, 34(6):689-696 doi: 10.3724/SP.J.1218.2012.00689 [45] Yu H T, Li M T, Cai H G. Analysis on the performance of the SLIP runner with nonlinear spring leg. Chinese Journal of Mechanical Engineering, 2013, 26(5):892-899 doi: 10.3901/CJME.2013.05.892 [46] Meghdari A, Sohrabpour S, Naderi D, Tamaddoni S H, Jafari F, Salarieh H. A novel method of gait synthesis for bipedal fast locomotion. Journal of Intelligent and Robotic Systems, 2008, 53(2):101-118 doi: 10.1007/s10846-008-9233-6 [47] Kwon O, Park J H. Asymmetric trajectory generation and impedance control for running of biped robots. Autonomous Robots, 2009, 26(1):47-78 doi: 10.1007/s10514-008-9106-7 [48] Celik H, Piazza S J. Simulation of aperiodic bipedal sprinting. Journal of Biomechanical Engineering, 2013, 135(8):81008 doi: 10.1115/1.4024577 [49] Tamaddoni S H, Jafari F, Meghdari A, Sohrabpour S. Biped hopping control bazsed on spring loaded inverted pendulum model. International Journal of Humanoid Robotics, 2010, 7(2):263-280 doi: 10.1142/S0219843610002106 [50] Han B, Luo X, Liu Q Y, Zhou B, Chen X D. Hybrid control for SLIP-based robots running on unknown rough terrain. Robotica, 2014, 32(7):1065-1080 doi: 10.1017/S0263574713001239 [51] Shen Z H, Seipel J. A piecewise-linear approximation of the canonical spring-loaded inverted pendulum model of legged locomotion. Journal of Computational and Nonlinear Dynamics, 2016, 11(1):011007 doi: 10.1115/1.4029664 [52] Geng T, Porr B, Wörgötter F. Fast biped walking with a sensor-driven neuronal controller and real-time online learning. The International Journal of Robotics Research, 2006, 25(3):243-259 doi: 10.1177/0278364906063822 [53] Geng T. Online regulation of the walking speed of a planar limit cycle walker via model predictive control. IEEE Transactions on Industrial Electronics, 2014, 61(5):2326-2333 doi: 10.1109/TIE.2013.2272274 [54] Endo G, Morimoto J, Matsubara T, Nakanishi J, Cheng G. Learning CPG-based biped locomotion with a policy gradient method:application to a humanoid robot. The International Journal of Robotics Research, 2008, 27(2):213-228 doi: 10.1177/0278364907084980 [55] Fu C L, Tan F, Chen K. A simple walking strategy for biped walking based on an intermittent sinusoidal oscillator. Robotica, 2010, 28(6):869-884 doi: 10.1017/S0263574709990713 [56] Liu C J, Wang D W, Chen Q J. Central pattern generator inspired control for adaptive walking of biped robots. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2013, 43(5):1206-1215 doi: 10.1109/TSMC.2012.2235426 [57] 薛方正, 陈强, 厚之成. 基于CPG的双足机器人多层步行控制器设计. 控制与决策, 2015, 30(3):467-472 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201503013.htmXue Fang-Zheng, Chen Qiang, Hou Zhi-Cheng. Central pattern generator based multi-level walking controller design of biped robot. Control and Decision, 2015, 30(3):467-472 http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201503013.htm [58] Srinivasan M, Ruina A. Computer optimization of a minimal biped model discovers walking and running. Nature, 2006, 439(7072):72-75 doi: 10.1038/nature04113 [59] Sinnet R W, Jiang S, Ames A D. A human-inspired framework for bipedal robotic walking design. International Journal of Biomechatronics and Biomedical Robotics, 2014, 3(1):20-41 doi: 10.1504/IJBBR.2014.059275 [60] Ames A D. Human-inspired control of bipedal walking robots. IEEE Transactions on Automatic Control, 2014, 59(5):1115-1130 doi: 10.1109/TAC.2014.2299342 [61] Ames A D. First steps toward automatically generating bipedal robotic walking from human data. Robot Motion and Control 2011. London:Springer, 2011.89-116 [62] Zhao H H, Ma W L, Ames A D, Zeagler M B. Human-inspired multi-contact locomotion with AMBER2. In:Proceedings of the 2014 ACM/IEEE International Conference on Cyber-Physical Systems. Berlin, Germany:IEEE, 2014.199-210 [63] Zhao H H, Powell M J, Ames A D. Human-inspired motion primitives and transitions for bipedal robotic locomotion in diverse terrain. Optimal Control Applications and Methods, 2014, 35(6):730-755 doi: 10.1002/oca.v35.6 [64] Powell M J, Cousineau E A, Ames A D. Model predictive control of underactuated bipedal robotic walking. In:Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, USA:IEEE, 2015.5121-5126 [65] Arai H, Tanie K, Shiroma N. Time-scaling control of an underactuated manipulator. Journal of Robotic Systems, 1998, 15(9):525-536 doi: 10.1002/(ISSN)1097-4563 [66] Dahl O, Nielsen L. Torque-limited path following by online trajectory time scaling. IEEE Transactions on Robotics and Automation, 1990, 6(5):554-561 doi: 10.1109/70.62044 [67] Chevallereau C, Grizzle J W, Shih C L. Asymptotically stable walking of a five-link underactuated 3-D bipedal robot. IEEE Transactions on Robotics, 2009, 25(1):37-50 doi: 10.1109/TRO.2008.2010366 [68] Shih C L, Grizzle J W, Chevallereau C. From stable walking to steering of a 3D bipedal robot with passive point feet. Robotica, 2012, 30(7):1119-1130 doi: 10.1017/S026357471100138X [69] Holm J K, Lee D, Spong M W. Time-scaling trajectories of passive-dynamic bipedal robots. In:Proceedings of the 2007 IEEE International Conference on Robotics and Automation. Roma, Italy:IEEE, 2007.3603-3608 http://www.doc88.com/p-9975360014940.html [70] Holm J K. Gait regulation for bipedal locomotion[Ph.D. dissertation], University of Illinois at Urbana-Champaign, USA, 2008. [71] Hu Y, Yan G F, Lin Z Y. Gait generation and control for biped robots with underactuation degree one. Automatica, 2011, 47(8):1605-1616 doi: 10.1016/j.automatica.2011.04.018 [72] Routh E J. A Treatise on the Stability of a Given State of Motion:Particularly Steady Motion. London:MacMillan, 1877. [73] Routh E J. Advanced Rigid Dynamics. London:McMillan, 1884. [74] Arnold V I. Dynamical Systems Ⅲ. Berlin Heidelberg:Springer-Verlag, 1988. [75] Marsden J E, Scheurle J. Lagrangian reduction and the double spherical pendulum. Zeitschrift für angewandte Mathematik und Physik, 1993, 44(1):17-43 doi: 10.1007/BF00914351 [76] Marsden J E, Scheurle J. The reduced euler-lagrange equations. Fields Institute Communications, 1993, 1:139-164 http://cn.bing.com/academic/profile?id=1681099931&encoded=0&v=paper_preview&mkt=zh-cn [77] Ames A D, Sastry S. Hybrid Routhian reduction of Lagrangian hybrid systems. In:Proceedings of the 2006 American Control Conference. Minneapolis, MN:IEEE, 2006. http://robotics.eecs.berkeley.edu/~sastry/2006Publications.htm [78] Ames A D, Sastry S. Hybrid geometric reduction of hybrid systems. In:Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, USA:IEEE, 2006.923-929 http://authors.library.caltech.edu/view/year/2006.html [79] Gregg R D, Spong M W. Reduction-based control of three-dimensional bipedal walking robots. The International Journal of Robotics Research, 2010, 29(6):680-702 doi: 10.1177/0278364909104296 [80] Ames A D, Gregg R D, Spong M W. A geometric approach to three-dimensional hipped bipedal robotic walking. In:Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA:IEEE, 2007.5123-5130 [81] Sinnet R W, Ames A D. 2D bipedal walking with knees and feet:a hybrid control approach. In:Proceedings of the 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference. Shanghai, China:IEEE, 2009.3200-3207 https://www.researchgate.net/publication/221043432_2D_Bipedal_Walking_with_Knees_and_Feet_A_Hybrid_Control_Approach [82] Ames A D, Tabuada P, Schürmann B, Ma W L, Kolathaya S, Rungger M, Grizzle J W. First steps toward formal controller synthesis for bipedal robots. In:Proceedings of the 18th International Conference on Hybrid Systems:Computation and Control. Seattle, WA, USA:ACM, 2015.209-218 [83] Westervelt E R, Grizzle J W, Koditschek D E. Hybrid zero dynamics of planar biped walkers. IEEE Transactions on Automatic Control, 2003, 48(1):42-56 doi: 10.1109/TAC.2002.806653 [84] Wang T, Chevallereau C, Tlalolini D. Stable walking control of a 3D biped robot with foot rotation. Robotica, 2014, 32(4), 551-570 doi: 10.1017/S0263574713000866 [85] Wang T, Chevallereau C, Rengifo C F. Walking and steering control for a 3D biped robot considering ground contact and stability. Robotics & Autonomous Systems, 2012, 60(7):962-977 https://www.researchgate.net/profile/Chevallereau_Christine/publication/257343871_Walking_and_steering_control_for_a_3D_biped_robot_considering_ground_contact_and_stability/links/561f6c6908aef097132df18e.pdf?inViewer=true&pdfJsDownload=true&disableCoverPage=true&origin=publication_detail [86] Sreenath K, Park H W, Poulakakis I, Grizzle J W. Embedding active force control within the compliant hybrid zero dynamics to achieve stable, fast running on MABEL. The International Journal of Robotics Research, 2013, 32(3):324-345 doi: 10.1177/0278364912473344 [87] Hereid A, Hubicki C M, Cousineau E A, Hurst J W, Ames A D. Hybrid zero dynamics based multiple shooting optimization with applications to robotic walking. In:Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle, WA, USA:IEEE, 2015.5734-5740 [88] Ober-Blöbaum S. Discrete Mechanics and Optimal Control[Ph.D. dissertation], University of Paderborn, Germany, 2008 doi: 10.1007/s10569-009-9229-y?view=classic [89] Pekarek D, Ames A D, Marsden J E. Discrete mechanics and optimal control applied to the compass gait biped. In:Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, USA:IEEE, 2007.5376-5382 [90] 孙中波, 段复建, 许春玲, 田彦涛. 不等式约束优化超线性收敛的信赖域-SQP算法. 应用数学学报, 2014, 37(5):878-890Sun Zhong-Bo, Duan Fu-Jian, Xu Chun-Ling, Tian Yan-Tao. A superlinearly convergent trust region-SQP algorithm for inequality constrained optimization. Acta Mathematicae Applicatae Sinica, 2014, 37(5):878-890 [91] Kai T, Shintani T. A gait generation method for the compass-type biped robot on slopes via discrete mechanics. In:Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, USA:IEEE, 2011.675-681 [92] Kai T, Shintani T. Gait generation on periodically unlevel grounds for the compass-type biped robot via discrete mechanics. In:Proceedings of the 2012 IEEE International Conference on Control Applications. Dubrovnik, Croatia:IEEE, 2012.1362-1368 http://dblp.uni-trier.de/db/conf/IEEEcca/IEEEcca2012 [93] Kai T, Shintani T. A discrete mechanics approach to gait generation on periodically unlevel grounds for the compass-type biped robot. International Journal of Advanced Research in Artificial Intelligence, 2013, 2(9):43-51 http://cn.bing.com/academic/profile?id=2043086838&encoded=0&v=paper_preview&mkt=zh-cn [94] Sun Z B, Tian Y T, Li H Y, Wang J. A superlinear convergence feasible sequential quadratic programming algorithm for bipedal dynamic walking robot via discrete mechanics and optimal control. Optimal Control Applications and Methods, DOI: 10.1002/oca.2228 [95] Sun Z B, Li H Y, Wang J, Tian Y T. A gait optimization smoothing penalty function method for bipedal robot via DMOC. In:Proceedings of the 17th IFAC Symposium on System Identification. Beijing, China:IFAC, 2015.1148-1153 [96] Aoyama T, Sekiyama K, Lu Z G, Hasegawa Y, Fukuda T. 3-D biped walking using double support phase and swing leg retraction based on the assumption of point-contact. Journal of Robotics and Mechatronics, 2012, 24(5):866-875 doi: 10.20965/jrm.issn.1883-8049 [97] 谭民, 王硕. 机器人技术研究进展. 自动化学报, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtmlTan Min, Wang Shuo. Research progress on robotics. Acta Automatica Sinica, 2013, 39(7):963-972 http://www.aas.net.cn/CN/abstract/abstract18124.shtml [98] Grizzle J W, Chevallereau C, Sinnet R W, Ames A D. Models, feedback control, and open problems of 3D bipedal robotic walking. Automatica, 2014, 50(8):1955-1988 doi: 10.1016/j.automatica.2014.04.021 -

 下载:
下载:






计量
- 文章访问数: 7846
- HTML全文浏览量: 885
- PDF下载量: 2351
- 被引次数: 0
