

-
摘要: 提出一种将诊断证据静态融合与动态更新相结合的故障诊断方法.在静态融合阶段,利用Dempster组合规则融合每个时刻的多条局部诊断证据,获取静态融合证据,并给出基于证据距离的故障信度静态收敛指标;在动态更新阶段,基于条件化的线性组合更新规则,利用当前时刻静态融合证据更新历史证据,获取更新后的全局性诊断证据,并给出基于S函数的故障信度动态收敛指标.在两个阶段中,基于静态和动态信度收敛性指标函数,分别给出相应的优化学习方法,获取静态融合中局部诊断证据的静态折扣系数、动态更新中历史与当前证据的更新权重系数等参数的最优值.在最大信度原则下,利用更新后获取的诊断证据做出诊断决策.最后,通过在电机柔性转子实验台上的诊断实验,将所提方法与已有的典型融合诊断方法进行了对比分析,说明所提出的融合诊断方法及其性能指标函数和参数优化方法的有效性.Abstract: This paper presents a new method of fault diagnosis combining static and dynamic fusing strategies. In the proposed static fusing strategy, Dempster rule is used to fuse multiple pieces of local diagnosis evidence to obtain static fused evidence, and belief degree convergence index of static evidence is defined based on distance between two pieces of evidence. In the proposed dynamic fusing strategy, the updating rule with conditional linear combination is used to fuse current and historical static fused evidence to obtain updated global diagnosis evidence and dynamic belief degree convergence index of updated evidence is defined based on the S function. In both strategies, corresponding optimization methods are presented to respectively train static discounting coefficients of local diagnosis evidence and updating weight coefficients of the current and historical static fused evidence based on the proposed convergence index functions. According to maximization rule of belief degree, diagnosis decision-making can be made via the updated evidence. Finally, in a diagnosis experiment on a rotor test bed, the proposed method is compared with some classical information fusion methods to show the effectiveness of the proposed diagnosis method and its convergence index functions and optimization strategies.
-
Key words:
- Fault diagnosis /
- information fusion /
- industrial alarm systems /
- evidence theory /
- evidence updating
-
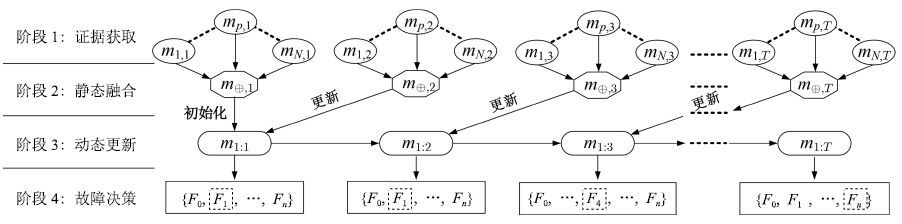
图 1 故障诊断的静态融合与动态更新过程
Fig. 1 Static fusion and dynamic updating processes of fault diagnosis
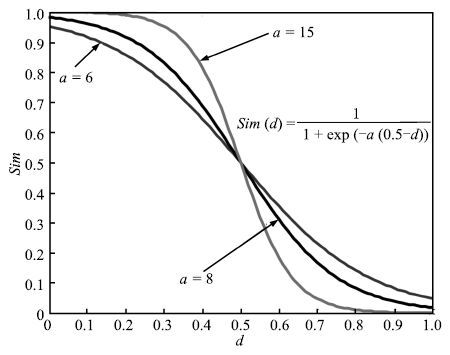
图 2 距离 $d$ 与相似度 $Sim$ 的关系图( $a=6,8,15$ )
Fig. 2 Relationship between $d$ and $Sim$ ( $a=6,8,15$ )

图 4 未优化和优化时静态融合与动态更新结果的比较
Fig. 4 Static fusion and dynamic updating result comparisons between the non-optimization case and the optimization case
表 1 相邻两全局证据相似度之差
Table 1 The similarity difference between two adjacent global evidence
状态: $m $ 1 2 采样时刻 $t$ 1 2 3 4 5 6 7 相似度差 $\Delta^l_{t,m}$ 1 0 0 0.8 0.1 -0.2 0.2 渐消因子 $λ^l_{t,m}$ 1 1/2 1/3 1 1/2 1/3  下载: 导出CSV
下载: 导出CSV
表 2 未折扣和折扣优化后融合结果 ${{m}_{\oplus,t}}$ 和 $^{{\boldsymbol \alpha} }{{m}_{\oplus ,t}}$ 对应的 $SI_m$ 取值
Table 2 The $SI_m$ values of the non-discounted fusion result ${{m}_{\oplus ,t}}$ and the discounted and optimized fusion result $^{{\boldsymbol \alpha} }{{m}_{\oplus ,t}}$
融合方法 $SI_m$ ${{m}_{\oplus ,t}}$ 23.1225 $^{{\boldsymbol \alpha} }{{m}_{\oplus ,t}}$ 21.7505
下载: 导出CSV
表 3 未折扣融合结果 ${{m}_{\oplus ,t}}$ 的误报/漏报次数统计表
Table 3 The statistics of alarms and no-alarms of the non-discounted fusion result ${{m}_{\oplus ,t}}$

表 4 折扣优化后融合结果α ${{m}_{\oplus ,t}}$ 的误报/漏报次数的统计表
Table 4 The statistics of alarms and no-alarms of the discounted & optimized fusion result α ${{m}_{\oplus ,t}}$

表 5 未优化和优化后更新结果 $m_{1:t}$ 和 ${}^a m_{1:t}$ 相应的 $UDI$ 、 $DDI$ 和 $DI$ 取值
Table 5 $UDI$ , $DDI$ and $DI$ values of the non-optimized updating result $m_{1:t}$ and the optimized updating result ${}^a m_{1:t}$
更新方法 $UDI$ $DDI$ $DI$ $(\kappa =\eta =0.5) $ $m_{1:t}$ 0.8285 0.8195 0.1760 ${}^a m_{1:t}$ 0.9411 0.9585 0.0502
下载: 导出CSV
表 6 未优化的更新结果m1:t的误报/漏报次数统计表
Table 6 The statistics of alarms and no-alarms of the non-optimized updating result m1:t

表 7 优化后史新结果αm1:t的误报/漏报次数的统计表
Table 7 The statistics of alarms and no-alarms of the optimized updating result αm1:t

表 8 测试样本下所获 ${}^a m_{1:t}$ 的 $UDI$ 、 $DDI$ 和 $DI$ 取值
Table 8 $UDI$ , $DDI$ and $UDI$ values of ${}^a m_{1:t}$ obtained from the test sample
基于参数优化的更新结果 $UDI$ $DDI$ $DI$ $(\kappa =\eta =0.5) $ ${}^a m_{1:t}$ 0.9434 0.9720 0.0423
下载: 导出CSV
表 9 测试样本下所获αm1:t的误报/漏报次数的统计表
Table 9 The statistics of alarms and no-alarms of αm1:t obtained from the test sample

表 10 基于无限惯性策略的线性更新方法的误报/漏报次数的统计表
Table 10 The statistics of alarms and no-alarms based on the infinite inertia based updating strategy

表 11 基于零惯性策略的线性更新方法的误报/漏报次数的统计表
Table 11 The statistics of alarms and no-alarms based on the zero inertia based updating strategy

表 12 基于比例性策略的线性更新方法的误报/漏报次数的统计表
Table 12 The statistics of alarms and no-alarms based on the proportional inertia based updating strategy

-
[1] 文成林, 徐晓滨. 多源不确定信息融合理论及应用:故障诊断与可靠性评估. 北京:科学出版社, 2012. 180-192Wen Cheng-Lin, Xu Xiao-Bin. Multi-Source Information Fusion Theory and Its Applications in Fault Diagnosis and Reliability Assessment. Beijing:Science Press, 2012. 180-192 [2] 徐晓滨, 文成林, 王迎昌. 基于模糊故障特征信息的随机集度量信息融合诊断方法. 电子与信息学报, 2009, 31(7):1635-1640 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200907023.htmXu Xiao-Bin, Wen Cheng-Lin, Wang Ying-Chang. Information fusion algorithm of fault diagnosis based on random set metrics of fuzzy fault features. Journal of Electronics and Information Technology, 2009, 31(7):1635-1640 http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX200907023.htm [3] Oukhellou L, Debiolles A, Denœux T, Aknin P. Fault diagnosis in railway track circuits using Dempster-Shafer classifier fusion. Engineering Applications of Artificial Intelligence, 2010, 23(1):117-128 doi: 10.1016/j.engappai.2009.06.005 [4] Fan X F, Zuo M J. Fault diagnosis of machines based on D-S evidence theory. Part 2:application of the improved D-S evidence theory in gearbox fault diagnosis. Pattern Recognition Letters, 2006, 27(5):377-385 [5] Wen C L, Xu X B, Jiang H N, Zhou Z. A new DSmT combination rule in open frame of discernment and its application. Science China Information Science, 2012, 55(3):551-557 doi: 10.1007/s11432-011-4532-0 [6] Shafer G. A Mathematical Theory of Evidence. Princeton:Princeton University Press, 1976. 25-28 [7] Basir O, Yuan X H. Engine fault diagnosis based on multi-sensor information fusion using Dempster-Shafer evidence theory. Information Fusion, 2007, 8(4):379-386 doi: 10.1016/j.inffus.2005.07.003 [8] Zhang Q H, Hu Q, Sun G X, Si X S, Qin A S. Concurrent fault diagnosis for rotating machinery based on vibration sensors. International Journal of Distributed Sensor Networks, 2013, 2013:Article ID 472675 [9] Peng M F, Tse C K, Shen M E, Xie K. Fault diagnosis of analog circuits using systematic tests based on data fusion. Circuits, Systems, and Signal Processing, 2013, 32(2):525-539 doi: 10.1007/s00034-012-9487-x [10] Luo H, Yang S L, Hu X J, Hu X X. Agent oriented intelligent fault diagnosis system using evidence theory. Expert Systems with Applications, 2012, 39(3):2524-2531 doi: 10.1016/j.eswa.2011.08.104 [11] Lardon L, Punal A, Steyer J P. On-line diagnosis and uncertainty management using evidence theory-experimental illustration to anaerobic digestion processes. Journal of Process Control, 2014, 14(7):747-763 [12] Marhic B, Delahoche L, Solau C, Jolly-Desodt A M, Ricquebourg V. An evidential approach for detection of abnormal behaviour in the presence of unreliable sensors. Information Fusion, 2012, 13(2):146-160 doi: 10.1016/j.inffus.2011.01.004 [13] Xu X B, Zhou Z, Wen C L. Data fusion algorithm of fault diagnosis considering sensor measurement uncertainty. International Journal on Smart Sensing and Intelligent Systems, 2013, 6(1):171-190 http://s2is.org/Issues/v6/n1/papers/paper10.pdf [14] Wen C L, Xu X B, Li Z L. Research on unified description and extension of combination rules of evidence based on random set theory. Chinese Journal of Electronics, 2008, 17(2):279-284 [15] Smets P. About updating. In:Proceedings of the 7th Conference on Uncertainty in Artificial Intelligence. San Mateo, CA:Morgan Kaufmann Publishers Inc., 1991. 378-385 [16] Dubois D, Prade H. Updating with belief functions, ordinal conditional functions and possibility measures. In:Proceedings of the 6th Annual Conference on Uncertainty in Artificial Intelligence. Amsterdam, NL:Elsevier Science, 1990. 311-329 [17] Shafer G. Jeffrey's rule of conditioning. Philosophy of Science, 1981, 48(3):337-362 doi: 10.1086/289004 [18] Smets P. The transferable belief model and random sets. International Journal of Intelligent Systems, 1992, 7(1):37-46 doi: 10.1002/(ISSN)1098-111X [19] Kulasekere E C, Premaratne K, Dewasurendra D A, Shyu M L, Bauer P H. Conditioning and updating evidence. International Journal of Approximate Reasoning, 2004, 36(1):75-108 doi: 10.1016/j.ijar.2003.10.001 [20] Jamrozik W. Importance discounting as a technique of expert knowledge incorporation into diagnostic decision-making process. Intelligent Systems in Technical and Medical Diagnostics. Berlin Heidelberg:Springer, 2014, 230:175-185 [21] Jousselme A L, Grenier D, Bossé É. A new distance between two bodies of evidence. Information Fusion, 2001, 2(2):91-101 doi: 10.1016/S1566-2535(01)00026-4 [22] Mercier D, Quost B, Denœux T. Refined modeling of sensor reliability in the belief function framework using contextual discounting. Information Fusion, 2008, 9(2):246-258 doi: 10.1016/j.inffus.2006.08.001 [23] Fagin R, Halpern J Y. A new approach to updating beliefs. In:Proceedings of the 6th Annual Conference on Uncertainty in Artificial Intelligence. New York:Elsevier Science Inc., 1991. 347-374 [24] Guo H W, Shi W K, Deng Y. Evaluating sensor reliability in classification problems based on evidence theory. IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2006, 36(5):970-981 doi: 10.1109/TSMCB.2006.872269 -

 下载:
下载:



计量
- 文章访问数: 2963
- HTML全文浏览量: 498
- PDF下载量: 1813
- 被引次数: 0
