

Underwater Cooperative Target Tracking Using Maritime Cross-Domain Swarms: Key Technologies and Future Perspectives
-
摘要: 随着海洋开发不断推进, 水下目标追踪作为无人集群实现对作业目标持续接近的基础性技术, 在海上搜救、海洋监测、海底资源勘探等关键应用中发挥着重要作用. 同时, 海上跨域集群通过无人机、无人船与无人潜器等异构平台间的信息交互与自主协同, 能够在复杂海洋环境中实现对水下目标的高效探测与持续追踪, 相比单一水下域集群, 其在感知与作业能力的提升等方面具有巨大的潜力. 然而, 当前水下协同追踪技术仍存在感知测量能力不足、跨域协同机制不完善和环境适应性难以兼顾等挑战. 为此, 本文首先针对水下目标追踪的发展趋势进行分析; 同时, 面向追踪过程中定位、跟踪、通信与规划四个基础模块, 总结研究难点和挑战, 并梳理国内外研究进展; 最后, 针对联合设计等新颖的研究理念和前沿需求进行探讨, 以期为海上跨域集群水下目标追踪技术的发展提供参考.Abstract: With the continuous advancement of marine development, underwater target tracking, as a foundational technology, enables continuous navigation of unmanned swarms toward the target and plays a crucial role in various applications such as maritime search and rescue, ocean monitoring, and seabed resource exploration. Meanwhile, maritime cross-domain swarms composed of heterogeneous platforms, including unmanned aerial, surface, and underwater vehicles, demonstrate significant potential in achieving efficient detection and tracking of underwater targets through information interaction and autonomous cooperation, which, compared to underwater single-domain swarms, holds significant potential for improving the effectiveness of perception and operation in complex marine environments. However, current technologies still face challenges including insufficient sensing capabilities, immature cross-domain cooperation mechanisms, and compromised environmental adaptability. To address these issues, this paper first analyzes the development trends of underwater target tracking. Subsequently, focusing on four fundamental modules, localization, tracking, communcation, and planning, we summarize existing research difficulties and review domestic as well as international research progress. Finally, emerging concepts, such as co-design, and frontier requirements are discussed, aiming to provide references for advancing underwater cooperative target tracking technologies with cross-domain swarms.
-
Key words:
- cross-domain swarms /
- underwater target /
- cooperative tracking /
- trend analysis /
- co-design
-
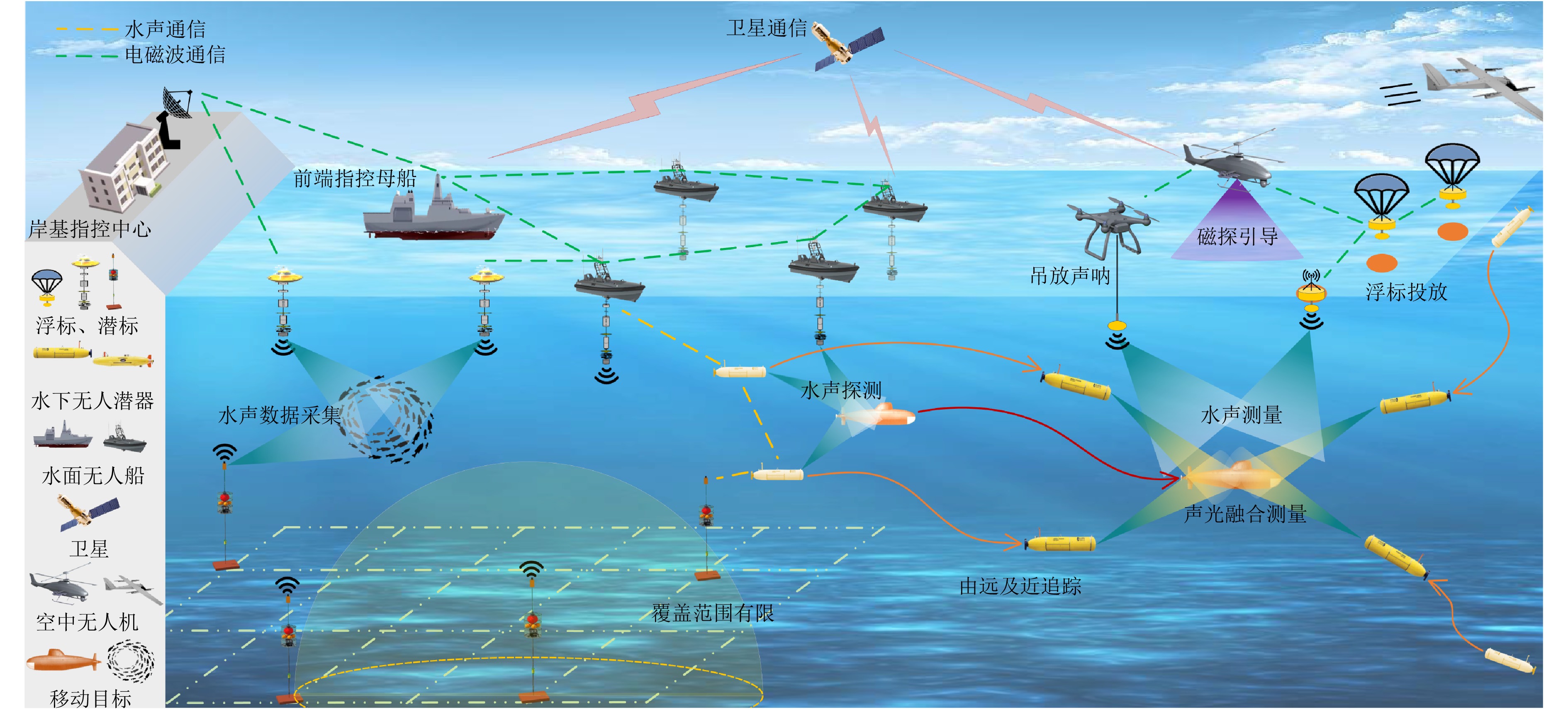
图 1 海上跨域集群水下目标协同追踪
Fig. 1 Cooperative underwater target tracking using maritime cross-domain swarms
-
[1] 闫敬, 关新平. 海上无人系统跨域集群发展现状及其关键技术. 自动化学报, 2025, 51(4): 744−761 doi: 10.16383/j.aas.c240334Yan Jing, Guan Xin-Ping. Development status and key techniques for cross-domain swarm of maritime unmanned systems. Acta Automatica Sinica, 2025, 51(4): 744−761 doi: 10.16383/j.aas.c240334 [2] Zhou Z Y, Liu J C, Yu J Z. A survey of underwater multi-robot systems. IEEE/CAA Journal of Automatica Sinica, 2022, 9(1): 1−18 doi: 10.1109/JAS.2021.1004269 [3] Li Y C, Yang Y, Yu W B, Guan X P. Cooperative highly-maneuvering target tracking using multi-AUV networks: A bearing-only approach. IEEE Transactions on Mobile Computing, DOI: 10.1109/TMC.2025.3606690 [4] 武文亮, 周兴社, 沈博, 赵月. 集群机器人系统特性评价研究综述. 自动化学报, 2022, 48(5): 1153−1172 doi: 10.16383/j.aas.c200964Wu Wen-Liang, Zhou Xing-She, Shen Bo, Zhao Yue. A review of swarm robotic systems property evaluation research. Acta Automatica Sinica, 2022, 48(5): 1153−1172 doi: 10.16383/j.aas.c200964 [5] 李风华, 郭永刚, 吴立新, 李整林. 海底观测网技术进展与发展趋势. 海洋技术学报, 2015, 34(3): 33−35Li Feng-Hua, Guo Yong-Gang, Wu Li-Xin, Li Zheng-Lin. Technological progress and development trend of ocean bottom observatory network. Journal of Ocean Technology, 2015, 34(3): 33−35 [6] Nishimura C E. Monitoring Whales and Earthquakes by Using SOSUS. Washington: Naval Research Laboratory, 1994. [7] Forrester N C, Stokey R P, von Alt C, Allen B G, Goldsborough R G, Purcell M J, et al. The LEO-15 long-term ecosystem observatory: Design and installation. In: Proceedings of the Oceans. MTS/IEEE Conference Proceedings. Halifax, Canada: IEEE, 1997. 1082−1088 [8] Massion G, Raybould K. MARS: The Monterey accelerated research system. Sea Technology, 2006, 47(9): 39−42 [9] 李风华, 路艳国, 王海斌, 郭永刚, 张飞. 海底观测网的研究进展与发展趋势. 中国科学院院刊, 2019, 34(3): 321−330Li Feng-Hua, Lu Yan-Guo, Wang Hai-Bin, Guo Yong-Gang, Zhang Fei. Research progress and development trend of seafloor observation network. Bulletin of Chinese Academy of Sciences, 2019, 34(3): 321−330 [10] Killeen T L. Ocean Observatories Initiative (OOI): Advanced research tools for the ocean sciences. Marine Technology Society Journal, 2010, 44(6): 15−17 doi: 10.4031/MTSJ.44.6.18 [11] 刘妹琴, 韩学艳, 张森林, 郑荣濠, 兰剑. 基于水下传感器网络的目标跟踪技术研究现状与展望. 自动化学报, 2021, 47(2): 235−251Liu Mei-Qin, Han Xue-Yan, Zhang Sen-Lin, Zheng Rong-Hao, Lan Jian. Research status and prospect of target tracking technologies via underwater sensor networks. Acta Automatica Sinica, 2021, 47(2): 235−251 [12] Révelard A, Tintoré J, Verron J, Bahurel P, Barth J A, Belbéoch M, et al. Ocean integration: The needs and challenges of effective coordination within the ocean observing system. Frontiers in Marine Science, 2022, 8: Article No. 737671 doi: 10.3389/fmars.2021.737671 [13] Wilkin J L, Rosenfeld L, Allen A, Baltes R, Baptista A, He R Y, et al. Advancing coastal ocean modelling, analysis, and prediction for the US Integrated Ocean Observing System. Journal of Operational Oceanography, 2017, 10(2): 115−126 doi: 10.1080/1755876X.2017.1322026 [14] Roughan M, Morris B D, Suthers I M. NSW-IMOS: An integrated marine observing system for southeastern Australia. IOP Conference Series: Earth and Environmental Science, 2010, 11: Article No. 012030 [15] Sozer E M, Stojanovic M, Proakis J G. Underwater acoustic networks. IEEE Journal of Oceanic Engineering, 2000, 25(1): 72−83 doi: 10.1109/48.820738 [16] Li Y C, Yu W B, Guan X P. 3D localization for multiple AUVs in anchor-free environments by exploring the use of depth information. IEEE/CAA Journal of Automatica Sinica, 2024, 11(4): 1051−1053 doi: 10.1109/JAS.2023.123261 [17] Li Y C, Liu L Y, Yu W B, Wang Y Y, Guan X P. Noncooperative mobile target tracking using multiple AUVs in anchor-free environments. IEEE Internet of Things Journal, 2020, 7(10): 9819−9833 doi: 10.1109/JIOT.2020.2988307 [18] Zhou S L, Wang Z H. OFDM for Underwater Acoustic Communications. Hoboken: Wiley, 2014. [19] Zeng Z, Sammut K, Lian L, He F P, Lammas A, Tang Y H. A comparison of optimization techniques for AUV path planning in environments with ocean currents. Robotics and Autonomous Systems, 2016, 82: 61−72 doi: 10.1016/j.robot.2016.03.011 [20] Yan J, Yang X, Zhao H Y, Luo X Y, Guan X P. Autonomous Underwater Vehicles: Localization, Tracking, and Formation. Singapore: Springer, 2021. [21] Karmozdi A, Hashemi M, Salarieh H, Alasty A. Implementation of translational motion dynamics for INS data fusion in DVL outage in underwater navigation. IEEE Sensors Journal, 2021, 21(5): 6652−6659 doi: 10.1109/JSEN.2020.3042902 [22] Paull L, Saeedi S, Seto M, Li H. AUV navigation and localization: A review. IEEE Journal of Oceanic Engineering, 2014, 39(1): 131−149 doi: 10.1109/JOE.2013.2278891 [23] Jiang Y H, Renner B C. Low-cost underwater swarm acoustic localization: A review. IEEE Access, 2024, 12: 25779−25796 doi: 10.1109/ACCESS.2024.3357359 [24] Xiong Y F, Wu N, Shen Y, Win M Z. Cooperative localization in massive networks. IEEE Transactions on Information Theory, 2022, 68(2): 1237−1258 doi: 10.1109/TIT.2021.3126346 [25] 于镇滔, 王忠庆, 刘鹏. 基于最大一致容积Kalman滤波器的多机器人协同定位. 导航定位与授时, 2022, 9(1): 104−110 doi: 10.19306/j.cnki.2095-8110.2022.01.013Yu Zhen-Tao, Wang Zhong-Qing, Liu Peng. Multi-robot cooperative localization based on maximum consensus cubature Kalman filter. Navigation Positioning and Timing, 2022, 9(1): 104−110 doi: 10.19306/j.cnki.2095-8110.2022.01.013 [26] Pearl J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. San Francisco: Morgan Kaufmann Publishers Inc., 1988. [27] 闫敬, 张立, 罗小元, 濮彬, 关新平. 异步时钟下基于信息物理融合的水下潜器协同定位算法. 自动化学报, 2019, 45(4): 739−748Yan Jing, Zhang Li, Luo Xiao-Yuan, Pu Bin, Guan Xin-Ping. Cyber-physical cooperative localization algorithms for underwater vehicle with asynchronous time clock. Acta Automatica Sinica, 2019, 45(4): 739−748 [28] Jiang L Y, Li Y C, Yu W B, Guan X P. Cooperative localization for asynchronous AUVs using time difference of communication in underwater anchor-free environments. IEEE Transactions on Cybernetics, 2024, 54(11): 6531−6544 doi: 10.1109/TCYB.2024.3447121 [29] Ihler A T, Fisher J W, Moses R L, Willsky A S. Nonparametric belief propagation for self-localization of sensor networks. IEEE Journal on Selected Areas in Communications, 2005, 23(4): 809−819 doi: 10.1109/JSAC.2005.843548 [30] Meyer F, Hlinka O, Hlawatsch F. Sigma point belief propagation. IEEE Signal Processing Letters, 2014, 21(2): 145−149 doi: 10.1109/LSP.2013.2290192 [31] Li Y C, Wang Y Y, Yu W B, Guan X P. Multiple autonomous underwater vehicle cooperative localization in anchor-free environments. IEEE Journal of Oceanic Engineering, 2019, 44(4): 895−911 doi: 10.1109/JOE.2019.2935516 [32] Magill D. Optimal adaptive estimation of sampled stochastic processes. IEEE Transactions on Automatic Control, 1965, 10(4): 434−439 doi: 10.1109/TAC.1965.1098191 [33] Myers K, Tapley B. Adaptive sequential estimation with unknown noise statistics. IEEE Transactions on Automatic Control, 1976, 21(4): 520−523 doi: 10.1109/TAC.1976.1101260 [34] Zhao J B, Mili L, Gómez-Expósito A. Constrained robust unscented Kalman filter for generalized dynamic state estimation. IEEE Transactions on Power Systems, 2019, 34(5): 3637−3646 doi: 10.1109/TPWRS.2019.2909000 [35] Wang S X, Wu Z M, Lim A. Robust state estimation for linear systems under distributional uncertainty. IEEE Transactions on Signal Processing, 2021, 69: 5963−5978 doi: 10.1109/TSP.2021.3118540 [36] Wang S X, Ye Z S. Distributionally robust state estimation for linear systems subject to uncertainty and outlier. IEEE Transactions on Signal Processing, 2022, 70: 452−467 doi: 10.1109/TSP.2021.3136804 [37] Li Y C, Yu W B, Xu H T, Guan X P. Robust multiple autonomous underwater vehicle cooperative localization based on the principle of maximum entropy. IEEE Transactions on Automation Science and Engineering, 2025, 22: 12960−12974 doi: 10.1109/TASE.2025.3546674 [38] Xin M Z, Yang F L, Wang F X, Shi B, Zhang K, Liu H. A TOA/AOA underwater acoustic positioning system based on the equivalent sound speed. The Journal of Navigation, 2018, 71(6): 1431−1440 doi: 10.1017/S037346331800036X [39] Li Y C, Yu W B, Guan X P. Hybrid TOA-AOA cooperative localization for multiple AUVs in the absence of anchors. IEEE Transactions on Industrial Informatics, 2024, 20(2): 2420−2431 doi: 10.1109/TII.2023.3266362 [40] Song Z Y, Mohseni K. Long-term inertial navigation aided by dynamics of flow field features. IEEE Journal of Oceanic Engineering, 2018, 43(4): 940−954 doi: 10.1109/JOE.2017.2766900 [41] Li Y C, Yu W B, Guan X P. Current-aided multiple-AUV cooperative localization and target tracking in anchor-free environments. IEEE/CAA Journal of Automatica Sinica, 2023, 10(3): 792−806 doi: 10.1109/JAS.2022.105989 [42] 丁文俊, 柴亚军, 杨宇贤, 刘佳敏, 毛昭勇. 基于空海异构无人平台的水下目标搜索与跟踪. 水下无人系统学报, 2024, 32(2): 237−249 doi: 10.11993/j.issn.2096-3920.2024-0037Ding Wen-Jun, Chai Ya-Jun, Yang Yu-Xian, Liu Jia-Min, Mao Zhao-Yong. Underwater target search and tracking based on air-sea heterogeneous unmanned platform. Journal of Unmanned Undersea Systems, 2024, 32(2): 237−249 doi: 10.11993/j.issn.2096-3920.2024-0037 [43] Zhao G F, Han T, Liang C D, Xiao B, Yan H C. Predefined-time hierarchical scheme for time-varying formation tracking of hybrid networked marine systems. International Journal of Robust and Nonlinear Control, 2025, 35(10): 4172−4186 doi: 10.1002/rnc.7895 [44] Yan J, Lin J S, Yang X, Chen C L, Guan X P. Cooperation detection and tracking of underwater target via aerial-surface-underwater vehicles. IEEE Transactions on Automatic Control, 2025, 70(2): 1068−1083 doi: 10.1109/TAC.2024.3447976 [45] Wei W, Wang J J, Fang Z R, Chen J R, Ren Y, Dong Y H. 3U: Joint design of UAV-USV-UUV networks for cooperative target hunting. IEEE Transactions on Vehicular Technology, 2023, 72(3): 4085−4090 doi: 10.1109/TVT.2022.3220856 [46] Lindsay J, Ross J, Seto M L, Gregson E, Moore A, Patel J, et al. Collaboration of heterogeneous marine robots toward multidomain sensing and situational awareness on partially submerged targets. IEEE Journal of Oceanic Engineering, 2022, 47(4): 880−894 doi: 10.1109/JOE.2022.3156631 [47] Ross J, Lindsay J, Gregson E, Moore A, Patel J, Seto M. Collaboration of multi-domain marine robots towards above and below-water characterization of floating targets. In: Proceedings of the IEEE International Symposium on Robotic and Sensors Environments. Ottawa, Canada: IEEE, 2019. 1−7 [48] Li X R, Jilkov V P. Survey of maneuvering target tracking. Part I. Dynamic models. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1333−1364 doi: 10.1109/TAES.2003.1261132 [49] Meyer F, Hlinka O, Wymeersch H, Riegler E, Hlawatsch F. Distributed localization and tracking of mobile networks including noncooperative objects. IEEE Transactions on Signal and Information Processing over Networks, 2016, 2(1): 57−71 doi: 10.1109/TSIPN.2015.2511920 [50] Liu H R, Jiang Q M, Qin Y H, Yin R R, Zhao S W. Double layer weighted unscented Kalman underwater target tracking algorithm based on sound speed profile. Ocean Engineering, 2022, 266(4): Article No. 112982 [51] Li X R, Bar-Shalom Y. Multiple-model estimation with variable structure. IEEE Transactions on Automatic Control, 1996, 41(4): 478−493 doi: 10.1109/9.489270 [52] Blom H A P, Bar-Shalom Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Transactions on Automatic Control, 1988, 33(8): 780−783 doi: 10.1109/9.1299 [53] Wang S H, Men C K, Li R X, Yeo T S. A maneuvering extended target tracking IMM algorithm based on second-order EKF. IEEE Transactions on Instrumentation and Measurement, 2024, 73: Article No. 8505011 [54] Li X H, Lu B, Li Y X, Lu X F, Jin H Y. Adaptive interacting multiple model for underwater maneuvering target tracking with one-step randomly delayed measurements. Ocean Engineering, 2023, 280: Article No. 114933 doi: 10.1016/j.oceaneng.2023.114933 [55] Wang S X. Distributionally robust state estimation for nonlinear systems. IEEE Transactions on Signal Processing, 2022, 70: 4408−4423 doi: 10.1109/TSP.2022.3203225 [56] Wang S X. Distributionally robust state estimation for jump linear systems. IEEE Transactions on Signal Processing, 2023, 71: 3835−3851 doi: 10.1109/TSP.2023.3322802 [57] Wang H Y, Zhang M H, Yu F. Experimental research on the passive positioning of underwater targets with near-field precision. In: Proceedings of the OES China Ocean Acoustics. Harbin, China: IEEE, 2024. 1−6 [58] Zhu Z R, Tao C H, Wu T, von Deimling J S, Zhang J H, Zhang G Y. Seafloor classification by fusing AUV acoustic and magnetic data: Toward complex deep-sea environments. IEEE Transactions on Geoscience and Remote Sensing, 2025, 63: Article No. 4203215 [59] Chen H J, Wang Z, Qin H D, Mu X K. UAMFDet: Acoustic-optical fusion for underwater multi-modal object detection. Journal of Field Robotics, 2025, 42(4): 970−983 doi: 10.1002/rob.22432 [60] Li Y F, Wang B, Sun J R, Wu X Y, Li Y. RGB-sonar tracking benchmark and spatial cross-attention transformer tracker. IEEE Transactions on Circuits and Systems for Video Technology, 2025, 35(3): 2260−2275 doi: 10.1109/TCSVT.2024.3497214 [61] You X H, Wang C X, Huang J, Gao X Q, Zhang Z C, Wang M, et al. Towards 6G wireless communication networks: Vision, enabling technologies, and new paradigm shifts. Science China Information Sciences, 2021, 64(1): Article No. 110301 doi: 10.1007/s11432-020-2955-6 [62] Liu J J, Shi Y P, Fadlullah Z M, Kato N. Space-air-ground integrated network: A survey. IEEE Communications Surveys & Tutorials, 2018, 20(4): 2714−2741 [63] Luo H J, Wang J L, Bu F F, Ruby R, Wu K S, Guo Z W. Recent progress of air/water cross-boundary communications for underwater sensor networks: A review. IEEE Sensors Journal, 2022, 22(9): 8360−8382 doi: 10.1109/JSEN.2022.3162600 [64] Jahanbakht M, Xiang W, Hanzo L, Azghadi M R. Internet of underwater things and big marine data analytics-a comprehensive survey. IEEE Communications Surveys & Tutorials, 2021, 23(2): 904−956 [65] Domingo M C. An overview of the internet of underwater things. Journal of Network and Computer Applications, 2012, 35(6): 1879−1890 doi: 10.1016/j.jnca.2012.07.012 [66] 王海斌, 汪俊, 台玉朋, 张仁和. 水声通信技术研究进展与技术水平现状. 信号处理, 2019, 35(9): 1441−1449Wang Hai-Bin, Wang Jun, Tai Yu-Peng, Zhang Ren-He. Development and the state of the art in underwater acoustic communication. Journal of Signal Processing, 2019, 35(9): 1441−1449 [67] Mikhlif H M, Ali M A A, Saleh Z A. Underwater wireless optical communication: A case study of chlorophyll effect. Journal of Optical Communications, 2024, 44(s1): s1365−s1370 [68] Singer A C, Nelson J K, Kozat S S. Signal processing for underwater acoustic communications. IEEE Communications Magazine, 2009, 47(1): 90−96 doi: 10.1109/MCOM.2009.4752683 [69] He C B, Xi R, Wang H, Jing L Y, Shi W T, Zhang Q F. Single carrier with frequency domain equalization for synthetic aperture underwater acoustic communications. Sensors, 2017, 17(7): Article No. 1584 doi: 10.3390/s17071584 [70] Kida Y, Deguchi M, Shimura T. A sparse adaptive decision feedback equalization approach for the high data rate vertical underwater acoustic communication in deep sea. Japanese Journal of Applied Physics, 2024, 63(4): Article No. 04SP61 [71] Tao J. DFT-precoded MIMO OFDM underwater acoustic communications. IEEE Journal of Oceanic Engineering, 2018, 43(3): 805−819 doi: 10.1109/JOE.2017.2735590 [72] Avrashi G, Amar A, Cohen I. Time-varying carrier frequency offset estimation in OFDM underwater acoustic communication. Signal Processing, 2022, 190: Article No. 108299 doi: 10.1016/j.sigpro.2021.108299 [73] Ouyang X, Zhao J. Orthogonal chirp division multiplexing. IEEE Transactions on Communications, 2016, 64(9): 3946−3957 doi: 10.1109/TCOMM.2016.2594792 [74] Omar M S, Ma X L. Performance analysis of OCDM for wireless communications. IEEE Transactions on Wireless Communications, 2021, 20(7): 4032−4043 doi: 10.1109/TWC.2021.3055070 [75] Wang B Y Y, Guan X P. Channel estimation for underwater acoustic communications based on orthogonal chirp division multiplexing. IEEE Signal Processing Letters, 2021, 28: 1883−1887 doi: 10.1109/LSP.2021.3111569 [76] Zhang R X, Wang Y Y, Ma X L. Channel estimation for OCDM transmissions with carrier frequency offset. IEEE Wireless Communications Letters, 2022, 11(3): 483−487 doi: 10.1109/LWC.2021.3133467 [77] Wang B Y Y, Wang Y Y, Li Y C, Guan X P. Underwater acoustic communications based on OCDM for internet of underwater things. IEEE Internet of Things Journal, 2023, 10(24): 22128−22142 doi: 10.1109/JIOT.2023.3304488 [78] Ouyang X, Dobre O A, Guan Y L, Townsend P. Channel estimation for multiple-input multiple-output orthogonal chirp-division multiplexing systems. IEEE Transactions on Wireless Communications, 2024, 23(1): 436−449 doi: 10.1109/TWC.2023.3278173 [79] Wang B Y Y, Huang P S, Li Y C. Carrier frequency offset estimation for MIMO OCDM underwater acoustic communications based on null symbols. In: Proceedings of the Chinese Control Conference. Kunming, China: IEEE, 2024. 3477−3482 [80] Wu Y. Coordinated path planning for an unmanned aerial-aquatic vehicle (UAAV) and an autonomous underwater vehicle (AUV) in an underwater target strike mission. Ocean Engineering, 2019, 182: 162−173 doi: 10.1016/j.oceaneng.2019.04.062 [81] Wu Y, Low K H, Lv C. Cooperative path planning for heterogeneous unmanned vehicles in a search-and-track mission aiming at an underwater target. IEEE Transactions on Vehicular Technology, 2020, 69(6): 6782−6787 doi: 10.1109/TVT.2020.2991983 [82] Zhang J, Wang Z X, Han G J, Qian Y J, Li Z L. A collaborative path planning method for heterogeneous autonomous marine vehicles. IEEE Internet of Things Journal, 2024, 11(1): 1465−1480 doi: 10.1109/JIOT.2023.3289793 [83] Cui H Q, Wang Y L. Four-mobile-beacon assisted localization in three-dimensional wireless sensor networks. Computers & Electrical Engineering, 2012, 38(3): 652−661 [84] Li L, Li Y P, Wang Y L, Xu G P, Wang H L, Gao P Y, et al. Multi-AUV coverage path planning algorithm using side-scan sonar for maritime search. Ocean Engineering, 2024, 300: Article No. 117396 doi: 10.1016/j.oceaneng.2024.117396 [85] Huang P S, Li Y C, Wang Y Y, Guan X P. Information-entropy-based trajectory planning for AUV-aided network localization: A reinforcement learning approach. IEEE Internet of Things Journal, 2025, 12(2): 2122−2134 doi: 10.1109/JIOT.2024.3470019 [86] Huang P S, Yu W B. A knowledge distillation based reinforcement learning scheme for multi-AUV trajectory planning in network localization. In: Proceedings of the IEEE International Conference on Unmanned Systems. Nanjing, China: IEEE, 2024. 1234−1239 [87] Ma X W, Chen Y L, Bai G Q, Liu J. Multi-AUV collaborative operation based on time-varying navigation map and dynamic grid model. IEEE Access, 2020, 8: 159424−159439 [88] Liu X F, Fang Y C, Zhan Z H, Jiang Y L, Zhang J. A cooperative evolutionary computation algorithm for dynamic multiobjective multi-AUV path planning. IEEE Transactions on Industrial Informatics, 2024, 20(1): 669−680 doi: 10.1109/TII.2023.3268760 [89] Li J, Lu H T, Zhang H H, Zhang Z H. Dynamic target hunting under autonomous underwater vehicle (AUV) motion planning based on improved dynamic window approach (DWA). Journal of Marine Science and Engineering, 2025, 13(2): Article No. 221 doi: 10.3390/jmse13020221 [90] Li Y C, Li B C, Yu W B, Zhu S Y, Guan X P. Cooperative localization based multi-AUV trajectory planning for target approaching in anchor-free environments. IEEE Transactions on Vehicular Technology, 2022, 71(3): 3092−3107 doi: 10.1109/TVT.2021.3137171 [91] 关新平, 陈彩莲, 杨博, 华长春, 吕玲, 朱善迎. 工业网络系统的感知传输控制一体化: 挑战和进展. 自动化学报, 2019, 45(1): 25−36 doi: 10.16383/j.aas.c180484Guan Xin-Ping, Chen Cai-Lian, Yang Bo, Hua Chang-Chun, Lv Ling, Zhu Shan-Ying. Towards the integration of sensing, transmission and control for industrial network systems: Challenges and recent developments. Acta Automatica Sinica, 2019, 45(1): 25−36 doi: 10.16383/j.aas.c180484 [92] Li Y C, Yu W B, Wang L. Analysis of belief propagation based cooperative localization and target tracking schemes. In: Proceedings of the China Automation Congress. Beijing, China: IEEE, 2021. 3348−3353 [93] Li Y C, Yu W B, Guan X P. Trajectory planning-aided cooperative localization for multi-AUV networks under harsh communication conditions: A co-designed approach. IEEE Transactions on Networking, DOI: 10.1109/TON.2025.3579395 [94] Yang Z W, Chen C L, Zhu S Y, Guan X P, Feng G. Distributed entrapping control of multiagent systems using bearing measurements. IEEE Transactions on Automatic Control, 2021, 66(12): 5696−5710 doi: 10.1109/TAC.2020.3046714 [95] Yang Z W, Zhu S Y, Chen C L, Feng G, Guan X P. Entrapping a target in an arbitrarily shaped orbit by a single robot using bearing measurements. Automatica, 2020, 113: Article No. 108805 doi: 10.1016/j.automatica.2020.108805 [96] Javaid S, Khalil R A, Saeed N, He B, Alouini M S. Leveraging large language models for integrated satellite-aerial-terrestrial networks: Recent advances and future directions. IEEE Open Journal of the Communications Society, 2025, 6: 399−432 doi: 10.1109/OJCOMS.2024.3522103 [97] Wen J B, Li Z, Xi M, He J Y. An LLM-assisted AUV 3-D path planning scheme under ocean current interference via reinforcement learning. IEEE Internet of Things Journal, 2025, 12(19): 39185−39196 doi: 10.1109/JIOT.2025.3540820 [98] Zhang T L, Jiao Q, Zhang Q, Han J G. Exploring multi-modal spatial-temporal contexts for high-performance RGB-T tracking. IEEE Transactions on Image Processing, 2024, 33: 4303−4318 doi: 10.1109/TIP.2024.3428316 [99] Cai W Y, Zhu J F, Zhang M Y. Multi-modality object detection with sonar and underwater camera via object-shadow feature generation and saliency information. Expert Systems With Applications, 2025, 287: Article No. 128021 doi: 10.1016/j.eswa.2025.128021 [100] Zhang L, Lin J H, Sabatini J, Borchers C, Weitekamp D, Cao M, et al. Data augmentation for sparse multidimensional learning performance data using generative AI. IEEE Transactions on Learning Technologies, 2025, 18: 145−164 doi: 10.1109/TLT.2025.3526582 [101] Zhu Y H, Cheng J F, Liu Z F, Zou X F, Cheng Q, Xu H, et al. Data generation approach based on data model fusion: An application for rolling bearings fault diagnosis with small samples. IEEE Transactions on Instrumentation and Measurement, 2025, 74: Article No. 3501916 [102] Kang M Y, Zhu R, Chen D X, Liu X L, Yu W W. CM-GAN: A cross-modal generative adversarial network for imputing completely missing data in digital industry. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(3): 2917−2926 doi: 10.1109/TNNLS.2023.3284666 [103] 任佳丽, 马龙, 刘航伊. 铸就铁肩担当 守护碧海安澜. 中国水运报, 2023-09-08 (05)Ren Jia-Li, Ma Long, Liu Hang-Yi. Cast iron shoulders, take on the responsibility of guarding the blue sea and calm waters. China Water Transport News, 2023-09-08 (05 [104] 王伟平, 张尤君, 董超, 李秋鹏, 郑策, 陈焱琨, 等. 海洋无人系统跨域协同观测技术进展. 无人系统技术, 2021, 4(4): 14−21 doi: 10.19942/j.issn.2096–5915.2021.4.032Wang Wei-Ping, Zhang You-Jun, Dong Chao, Li Qiu-Peng, Zheng Ce, Chen Yan-Kun, et al. Progress of cross domain collaborative observation technology for marine unmanned system. Unmanned Systems Technology, 2021, 4(4): 14−21 doi: 10.19942/j.issn.2096–5915.2021.4.032 [105] “海斗一号”取得世界级成果. 科学24小时, 2021(12): 38“Haidou-1” achieves world-class results. Science in 24 Hours, 2021(12): 38 -

 下载:
下载:

图(8)
计量
- 文章访问数: 1464
- HTML全文浏览量: 1405
- PDF下载量: 337
- 被引次数: 0
