

A Theoretical and Technical Framework for Roboticized Mining and Hauling in Open-pit Mines
-
摘要: 露天矿机器人化开采面临复杂环境数据不足、极端工况测试难、现场试验风险高、动态感知建模复杂及实验周期长等挑战. 为此, 提出基于“端边感知、平行控制”的露天矿机器人化采运智慧生产模式, 从车辆感控、车铲协同、集群调度与工程示范等多层面入手, 系统地突破提效开采机理、高精度全域感知、稳定协同控制与可靠群体管控等核心科学问题. 通过技术集成与工艺优化, 实现百吨级以上无人驾驶运输车的规模化运行, 形成我国露天煤矿高水平智能化的“双十” (10项创新技术、10项标准)、“双百” (100台车示范, 运输效率达有人系统110%)、“双千” (千台车监控平台、千小时无故障运行)中国方案, 有力支撑了我国矿山智能化绿色开采发展战略.Abstract: Roboticized mining in open-pit mines faces challenges such as insufficient data in complex environments, difficulties in testing under extreme working conditions, high risks in field trials, complexities in dynamic perception and modeling, and lengthy experimental cycles. To address these, a smart production model for robotic mining and hauling in open-pit mines based on “end-edge sensing and parallel control” has been proposed. By focusing on vehicle perception and control, shovel-vehicle collaboration, fleet scheduling, and engineering demonstrations, this model systematically addresses core scientific issues, including the mechanisms for efficient mining, high-precision holistic perception, stable and efficient collaborative control, and reliable group management. Through technological integration and process optimization, the large-scale operation of unmanned haul trucks with capacities exceeding 100 tons has been achieved. This forms the “double ten” (10 innovative technologies, 10 robotic mining standards), “double hundred” (100-vehicle demonstration, achieving 110% transportation efficiency compared to manned systems), and “double thousand” (monitoring platform for
1000 vehicles,1000 hours of mean time between failures) Chinese solution, driving high-level intelligent development in China's open-pit coal mines. It strongly supports the national strategy for intelligent and green mining. -
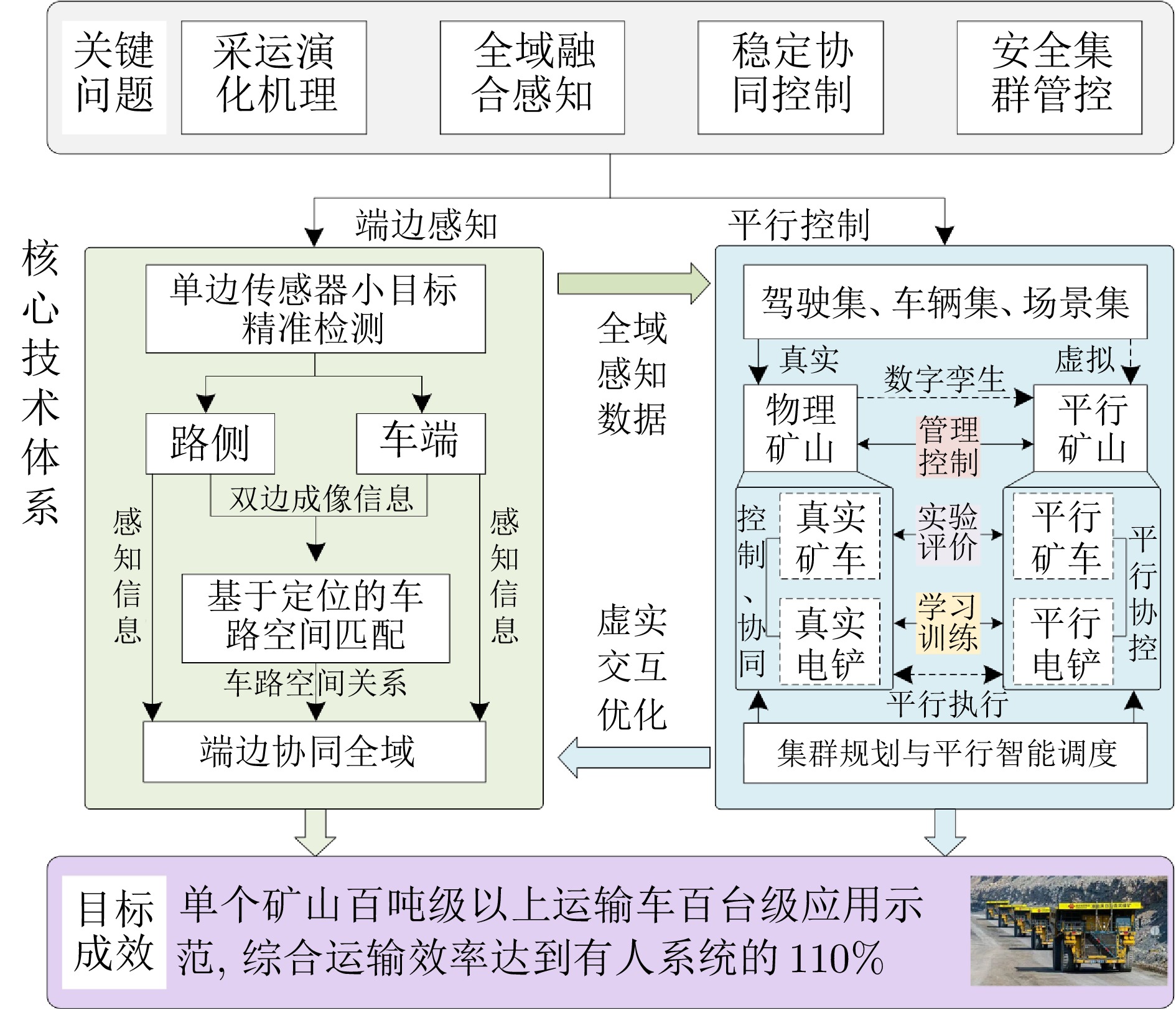
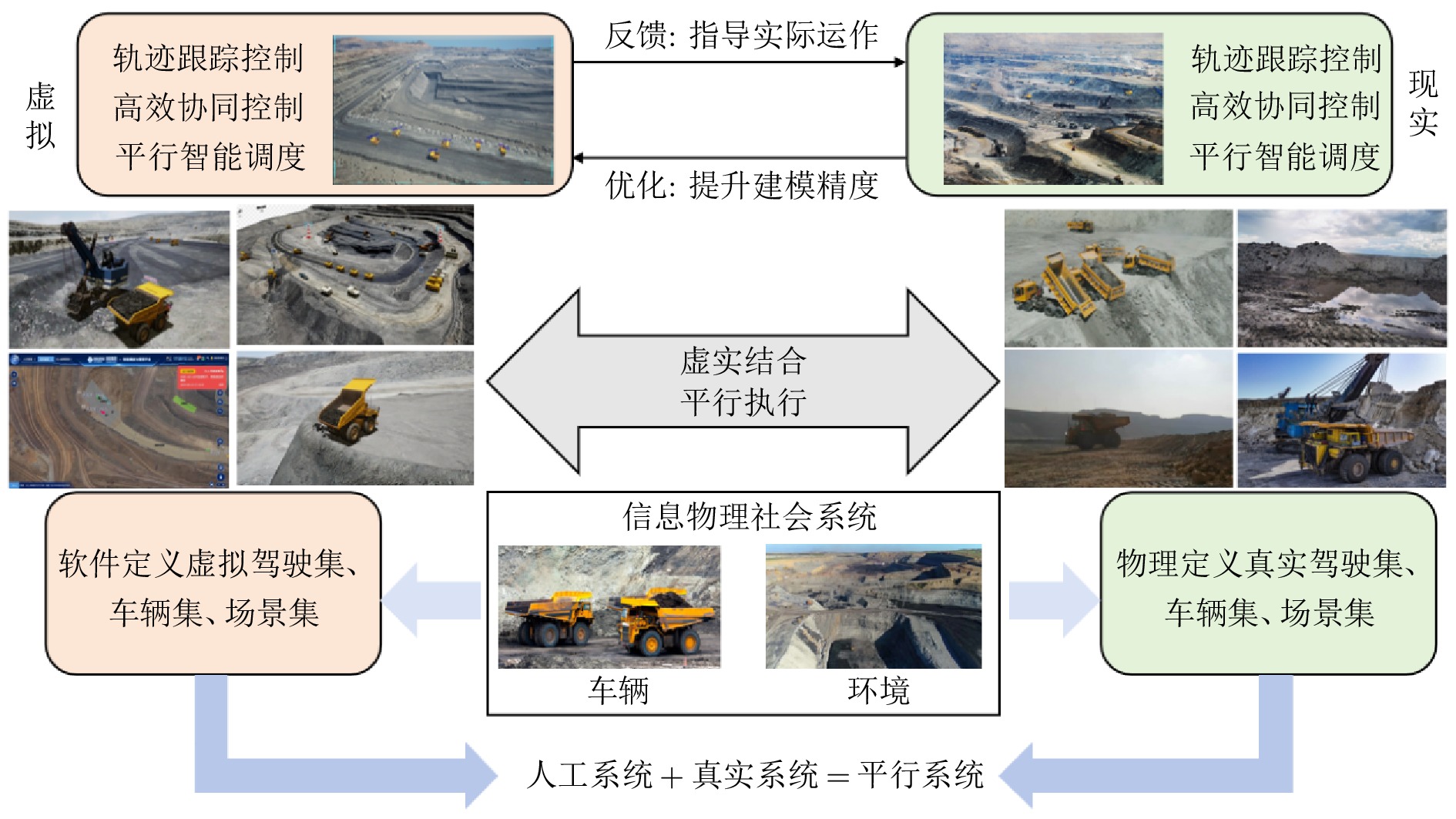
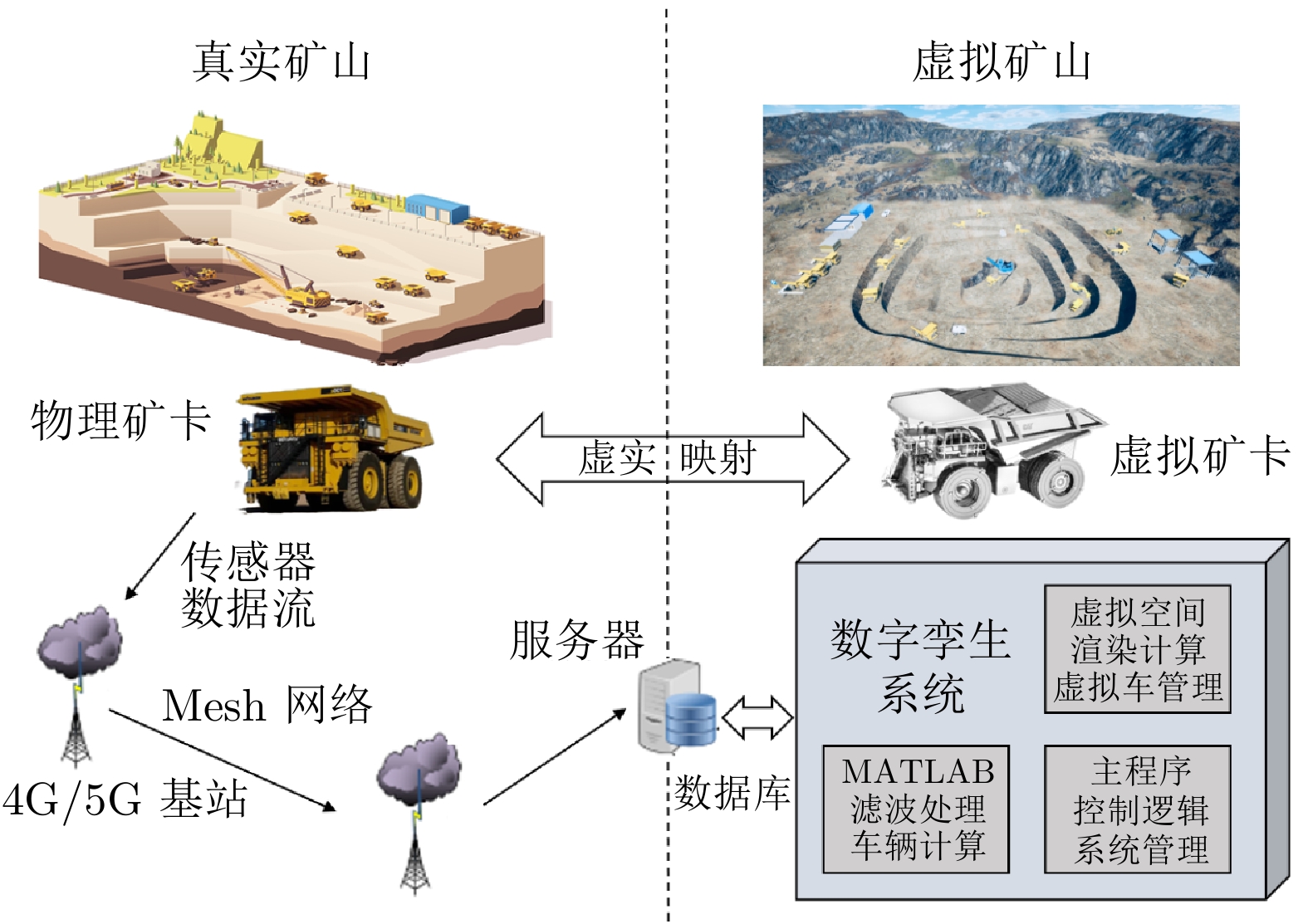
图 3 机器人化采运的“端边感知、平行控制”智慧架构
Fig. 3 “End-edge sensing and parallel control” intelligent framework for roboticized mining and hauling
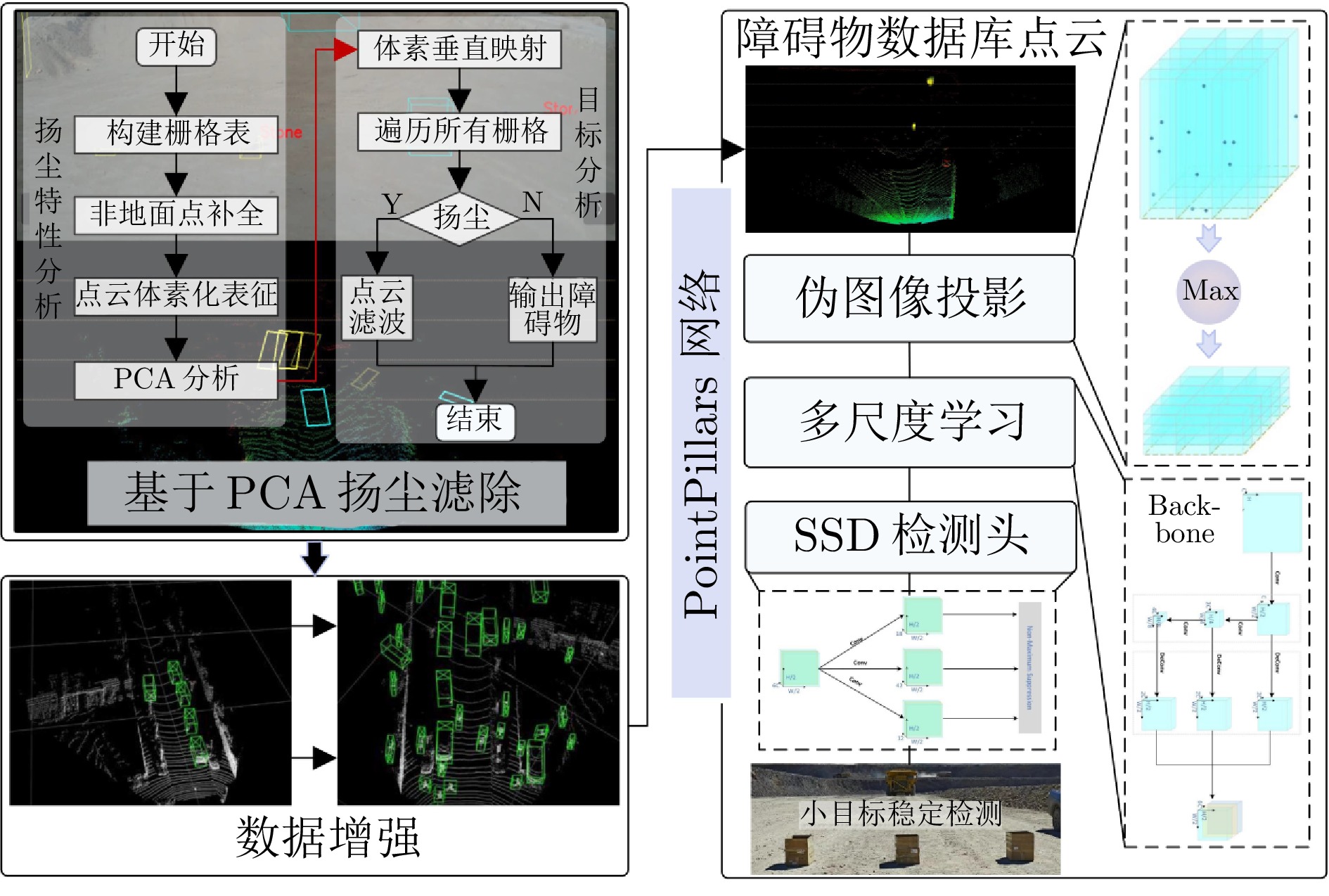
图 5 基于PCA-PointPillars小目标检测技术路线
Fig. 5 PCA-PointPillars-based small target detection technical approach
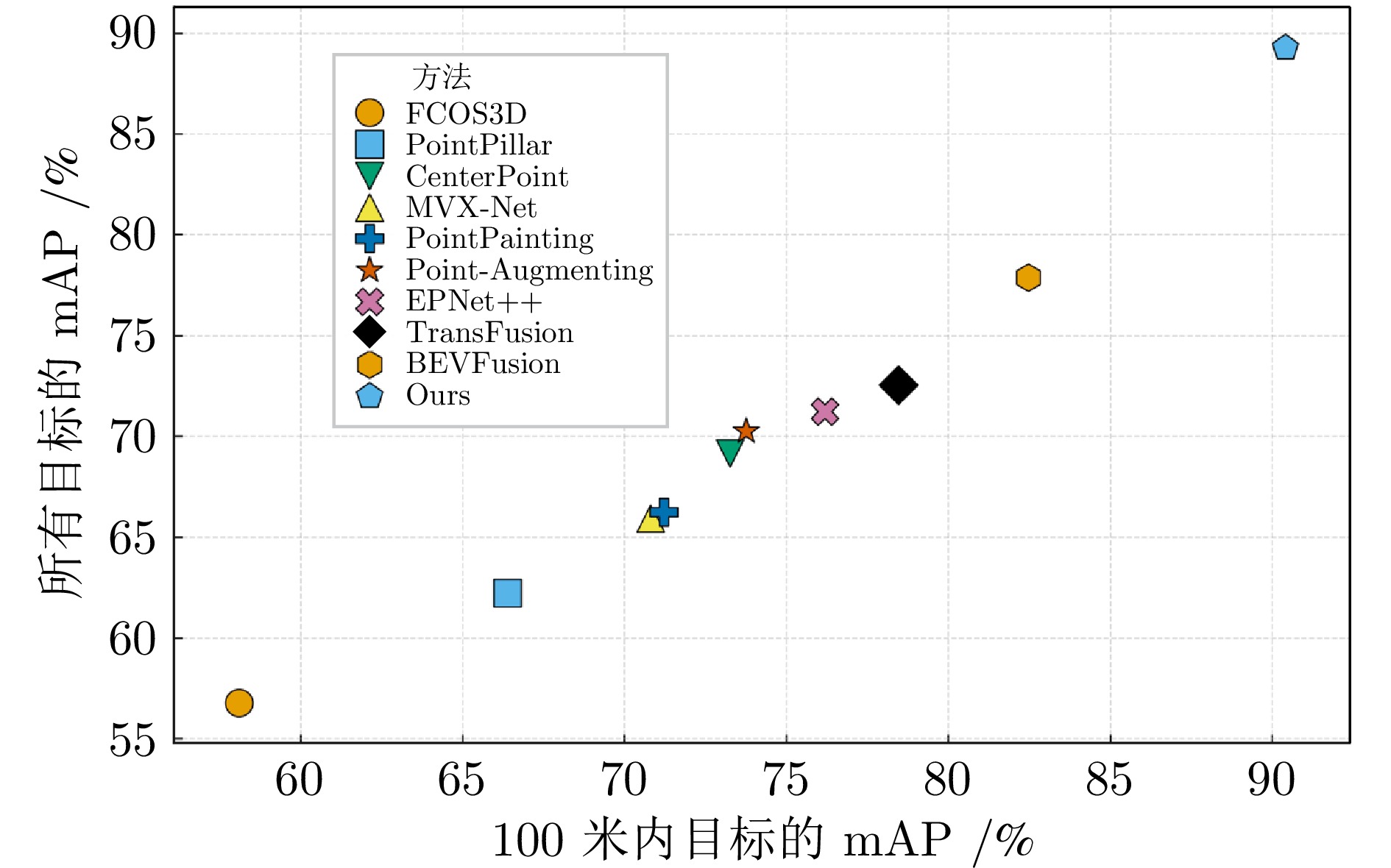
图 6 矿区3D目标检测性能对比图
Fig. 6 3D object detection performance comparison chart for mining area
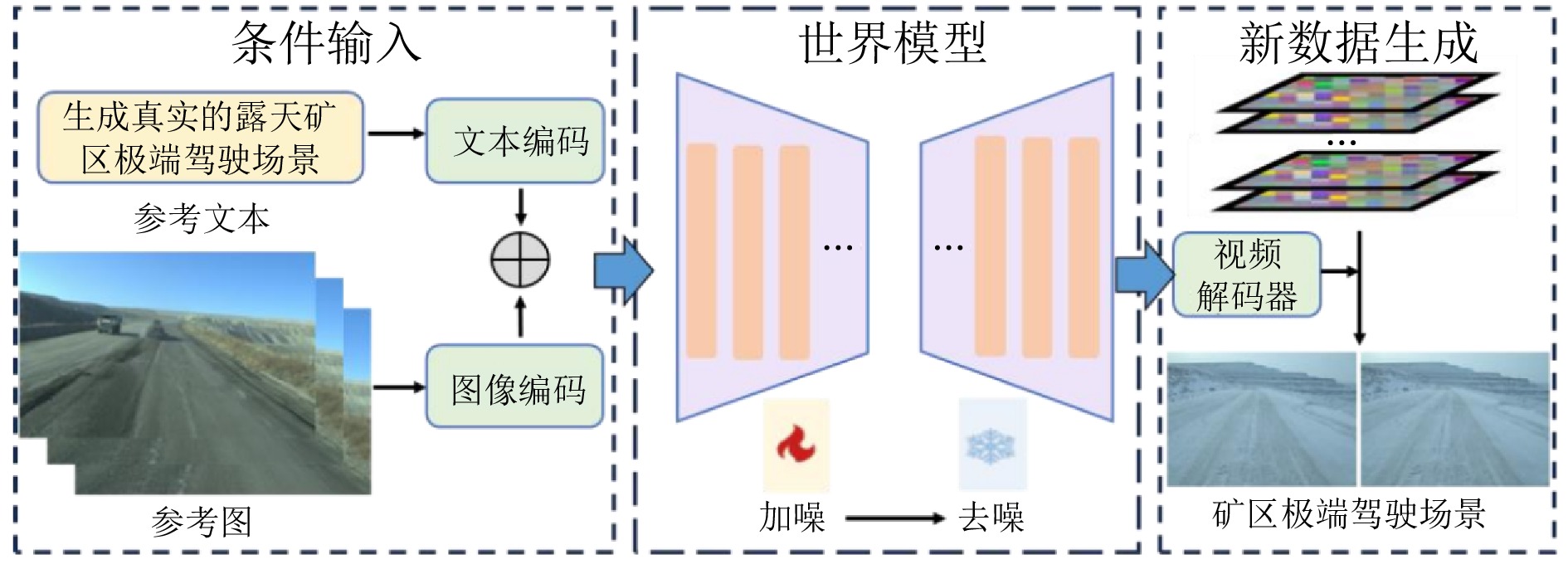
图 7 世界模型生成矿区驾驶场景数据
Fig. 7 Generation of world models for mining area driving scene data
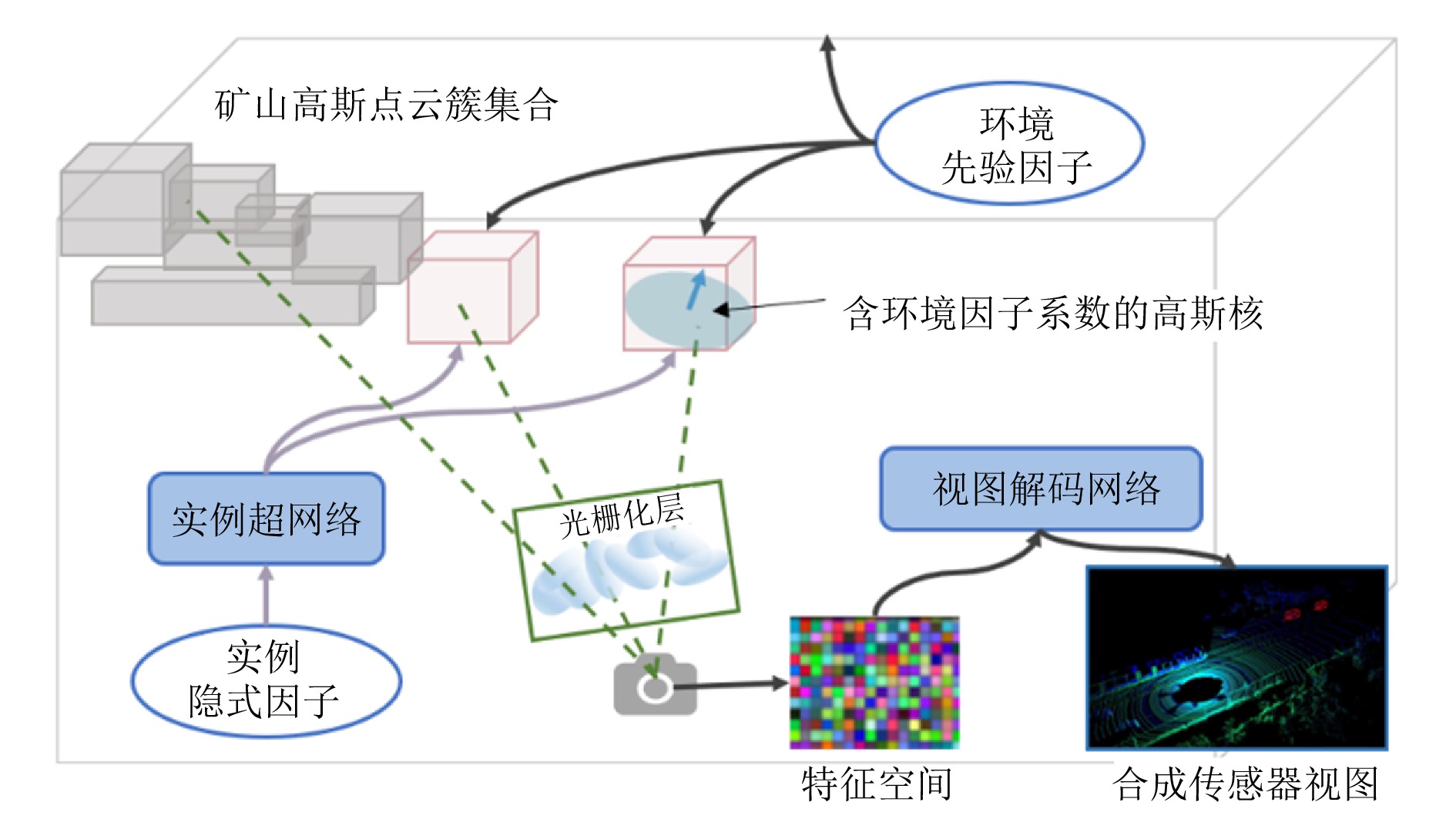
图 10 矿区三维高斯重建及投影模型
Fig. 10 3D Gaussian reconstruction and projection model of the mining area
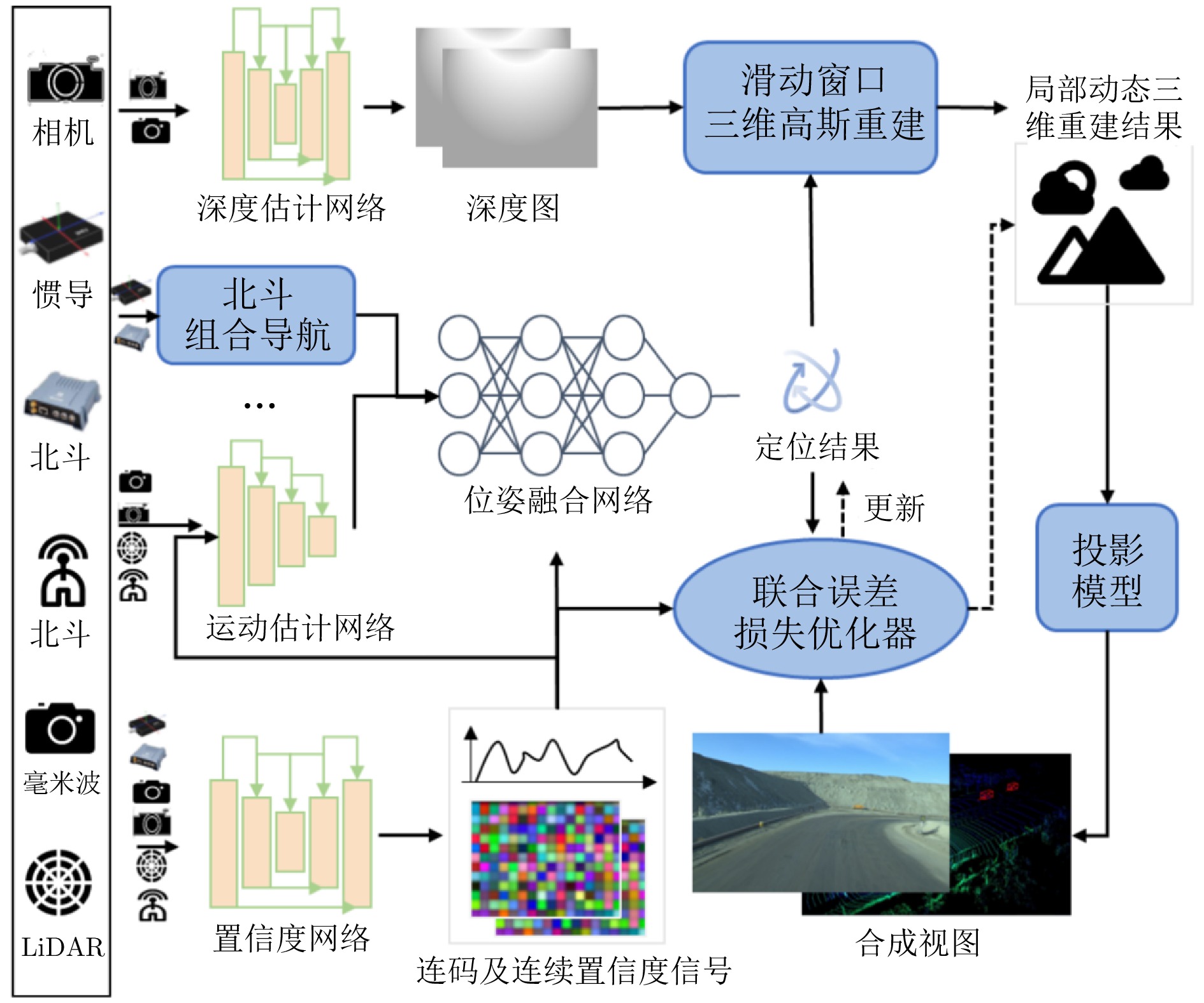
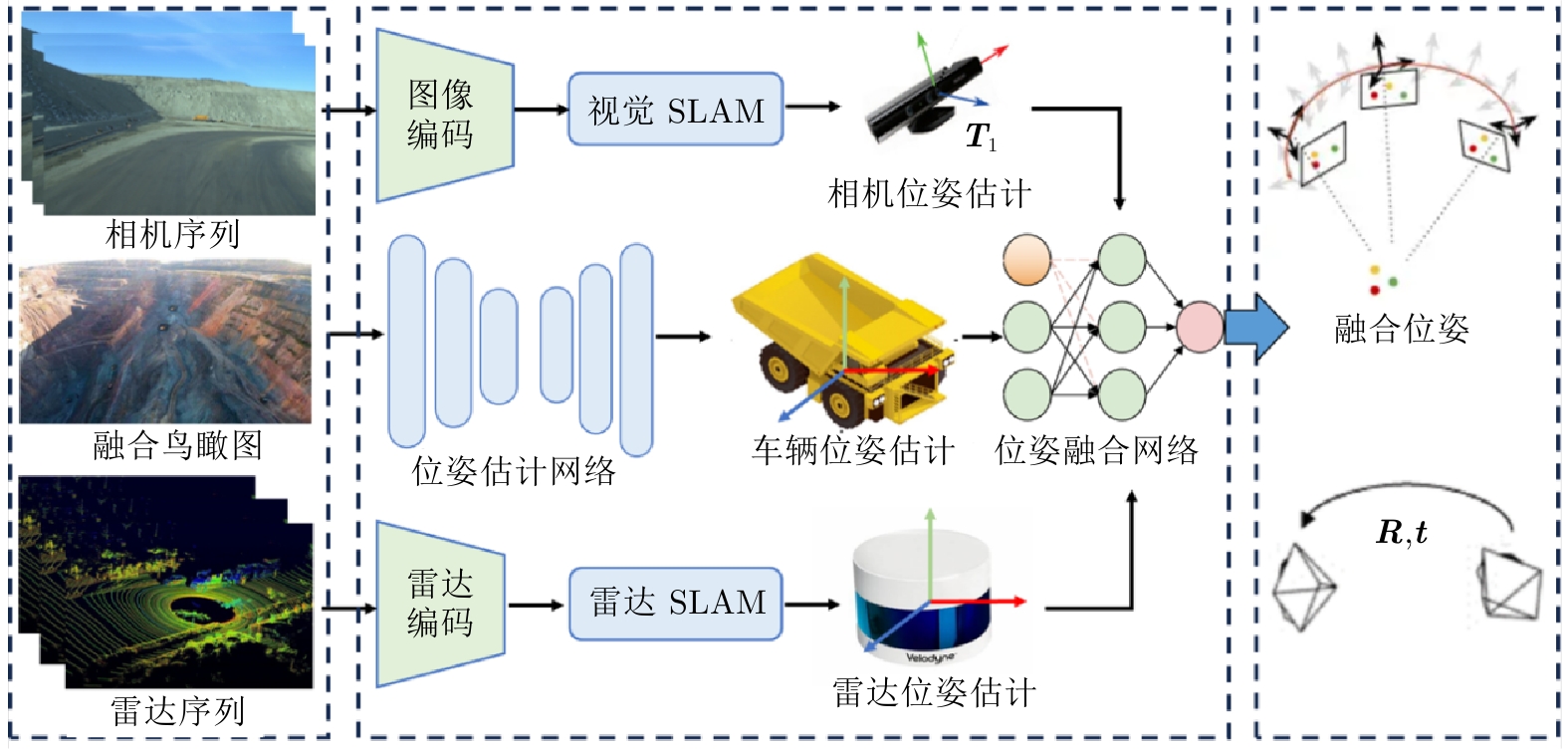
图 12 基于时空置信度的多模态传感器融合定位方法
Fig. 12 Multi-modal sensor fusion localization approach based on spatiotemporal confidence
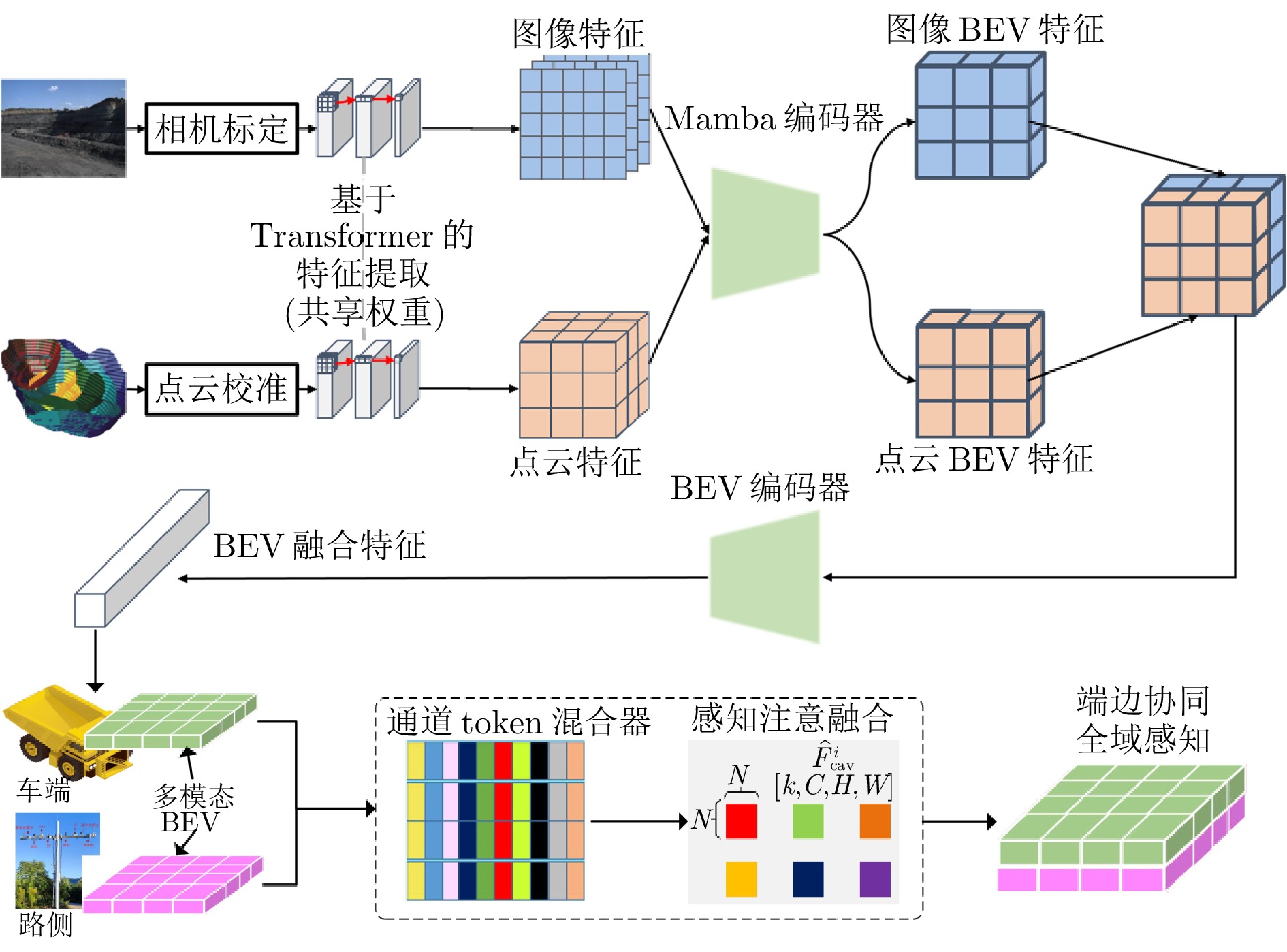
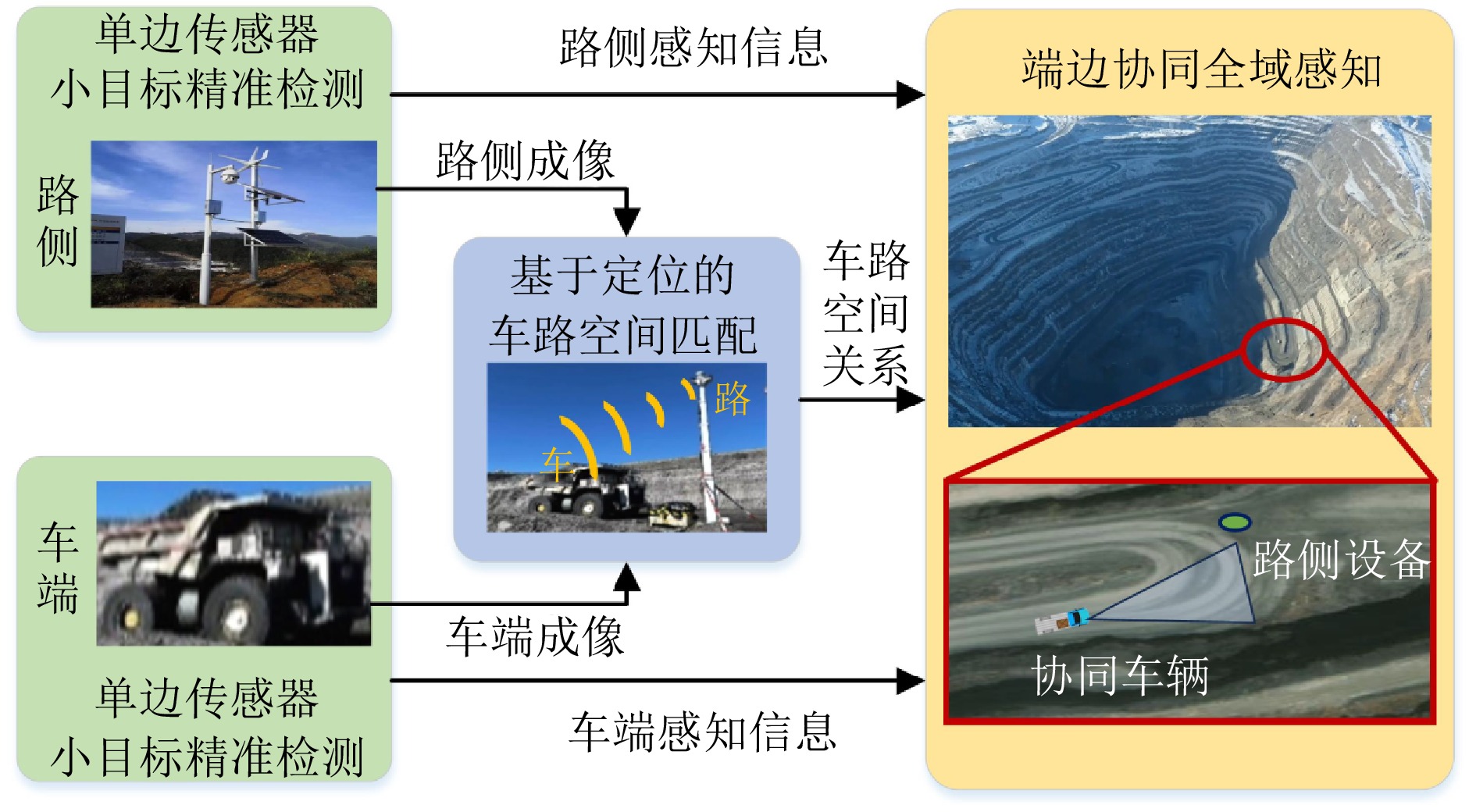
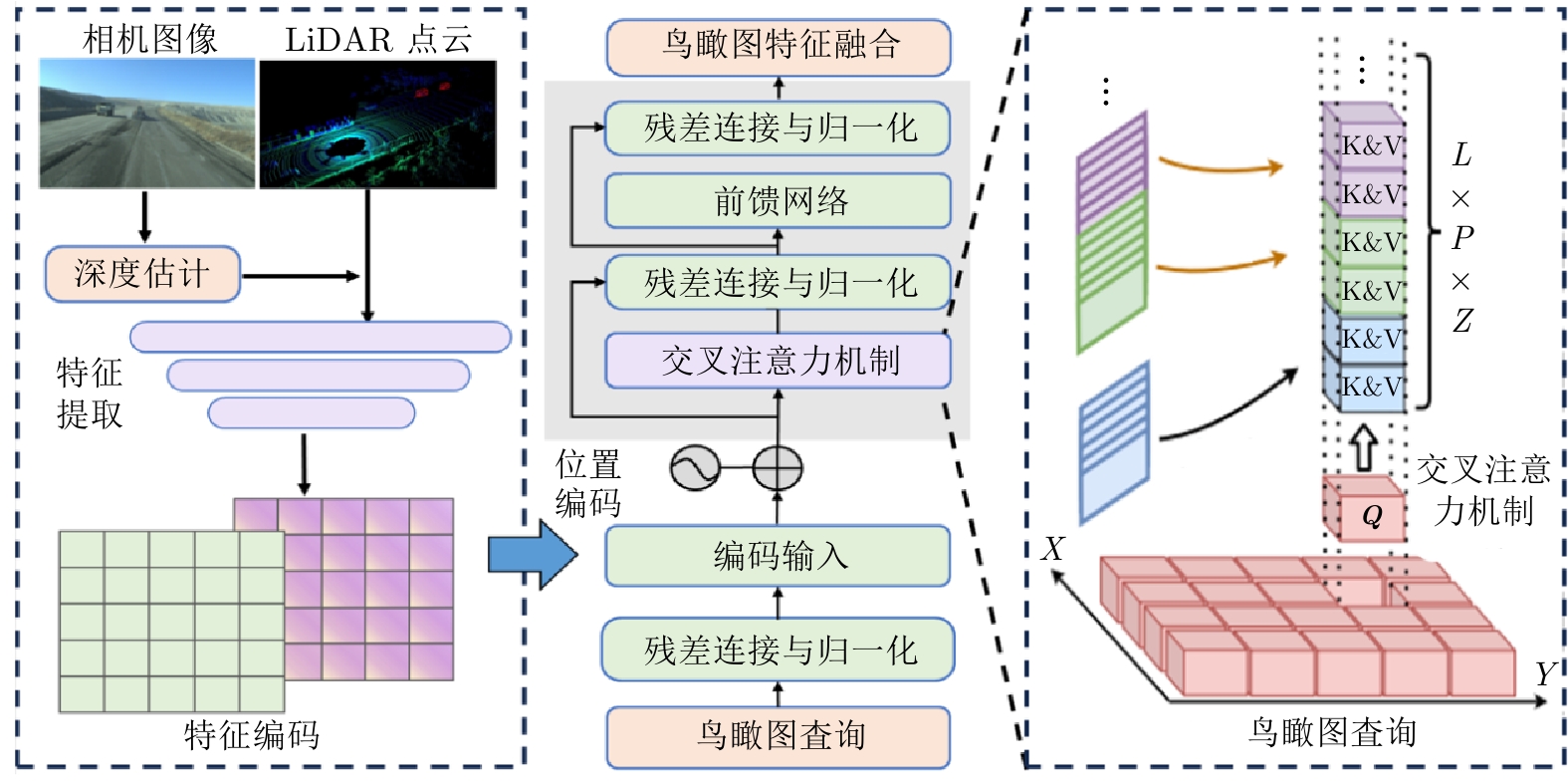
图 14 基于BEV的多模态端边系统全域感知技术路线
Fig. 14 BEV-based multi-modal end-edge system for omnidirectional perception technology roadmap
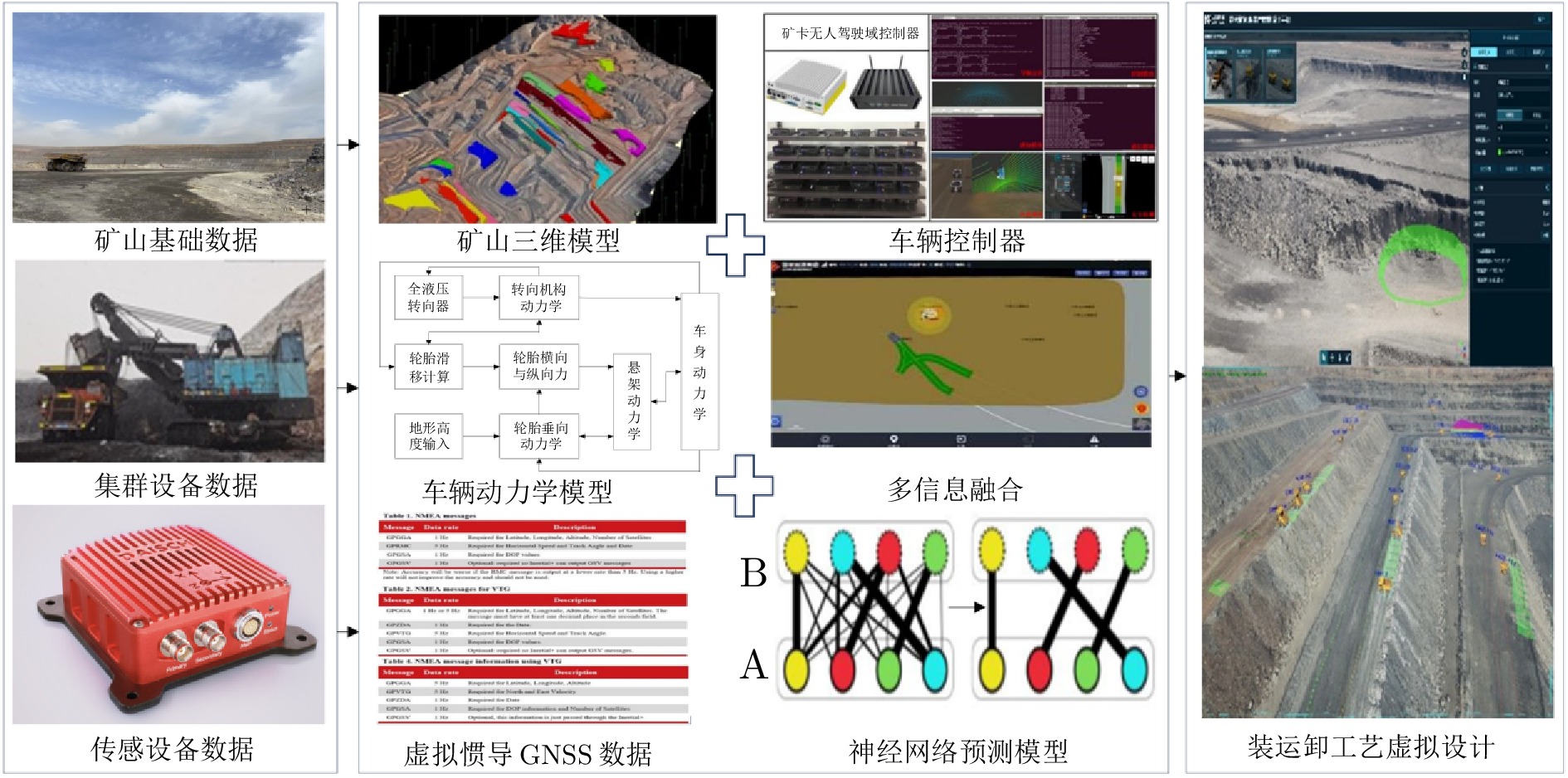
图 16 平行仿真平台设计总体技术路线
Fig. 16 Comprehensive technological roadmap for parallel simulation platform design
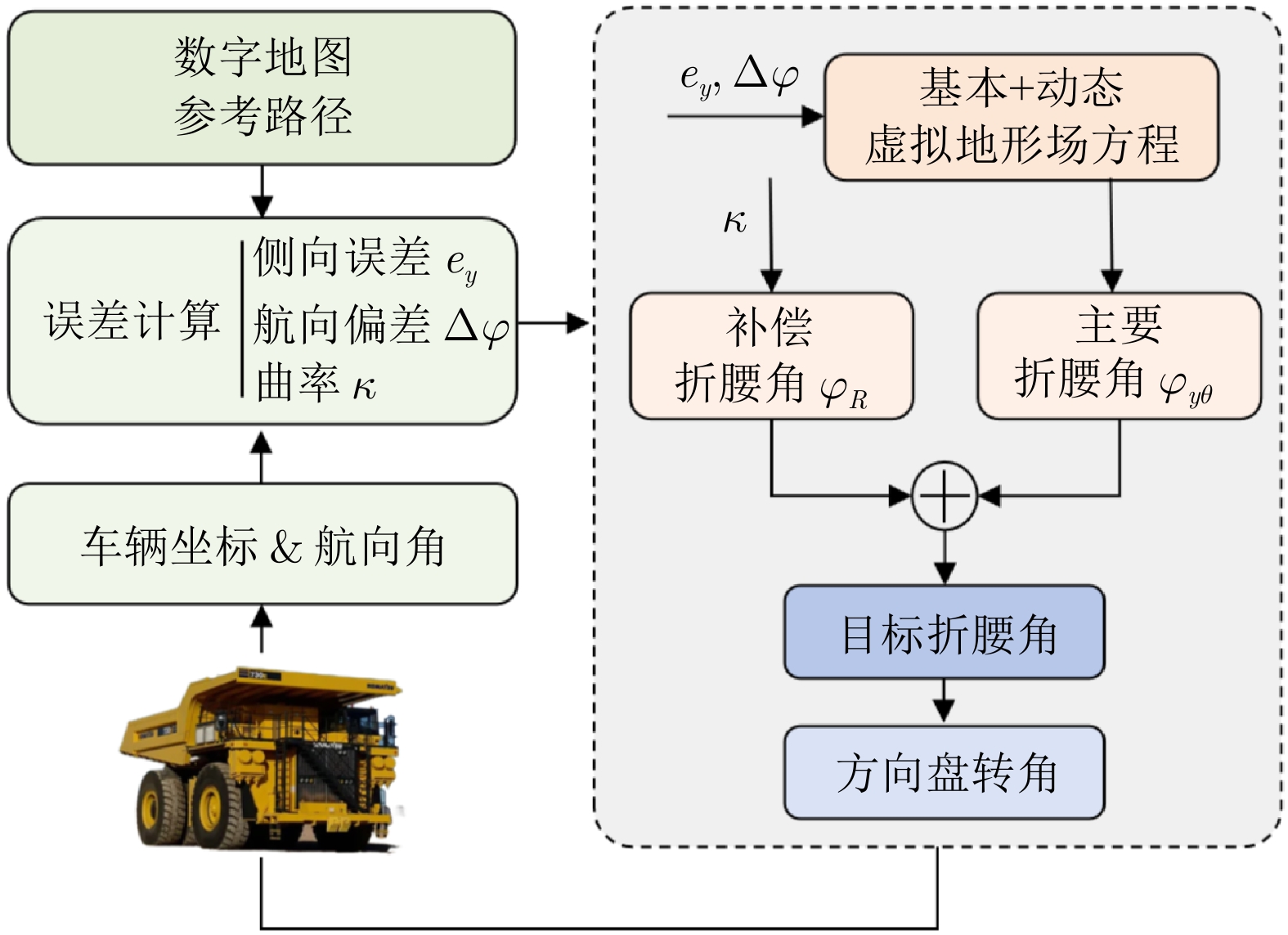
图 20 虚拟地形场路径跟踪控制原理示意图
Fig. 20 Schematic of virtual terrain path tracking control principle
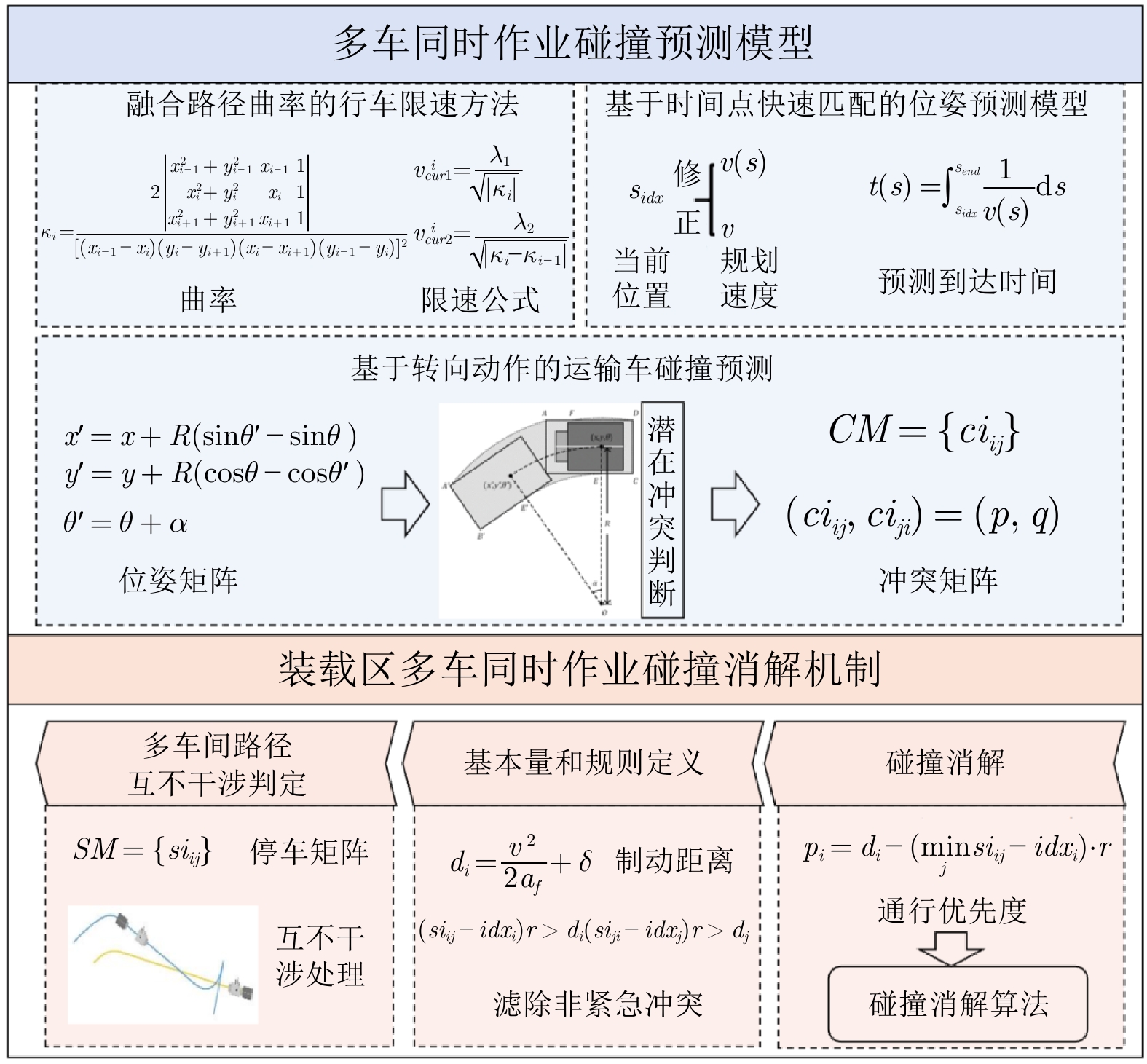
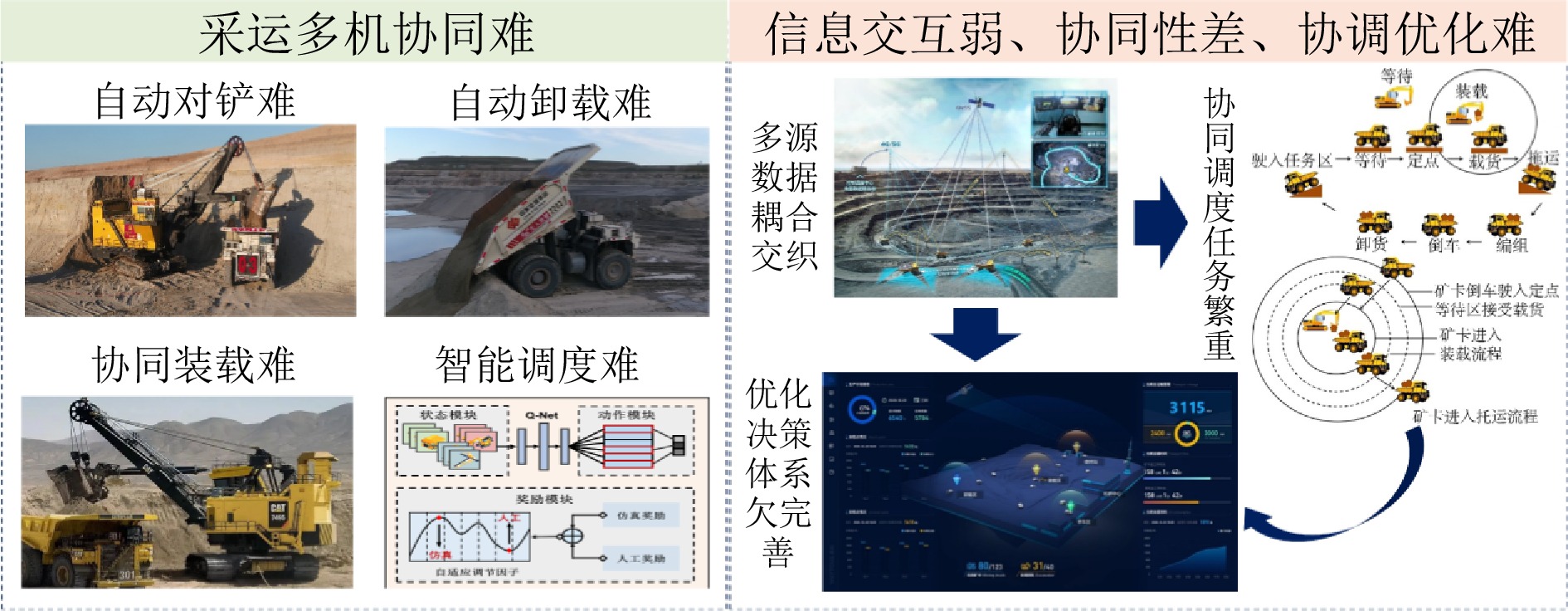
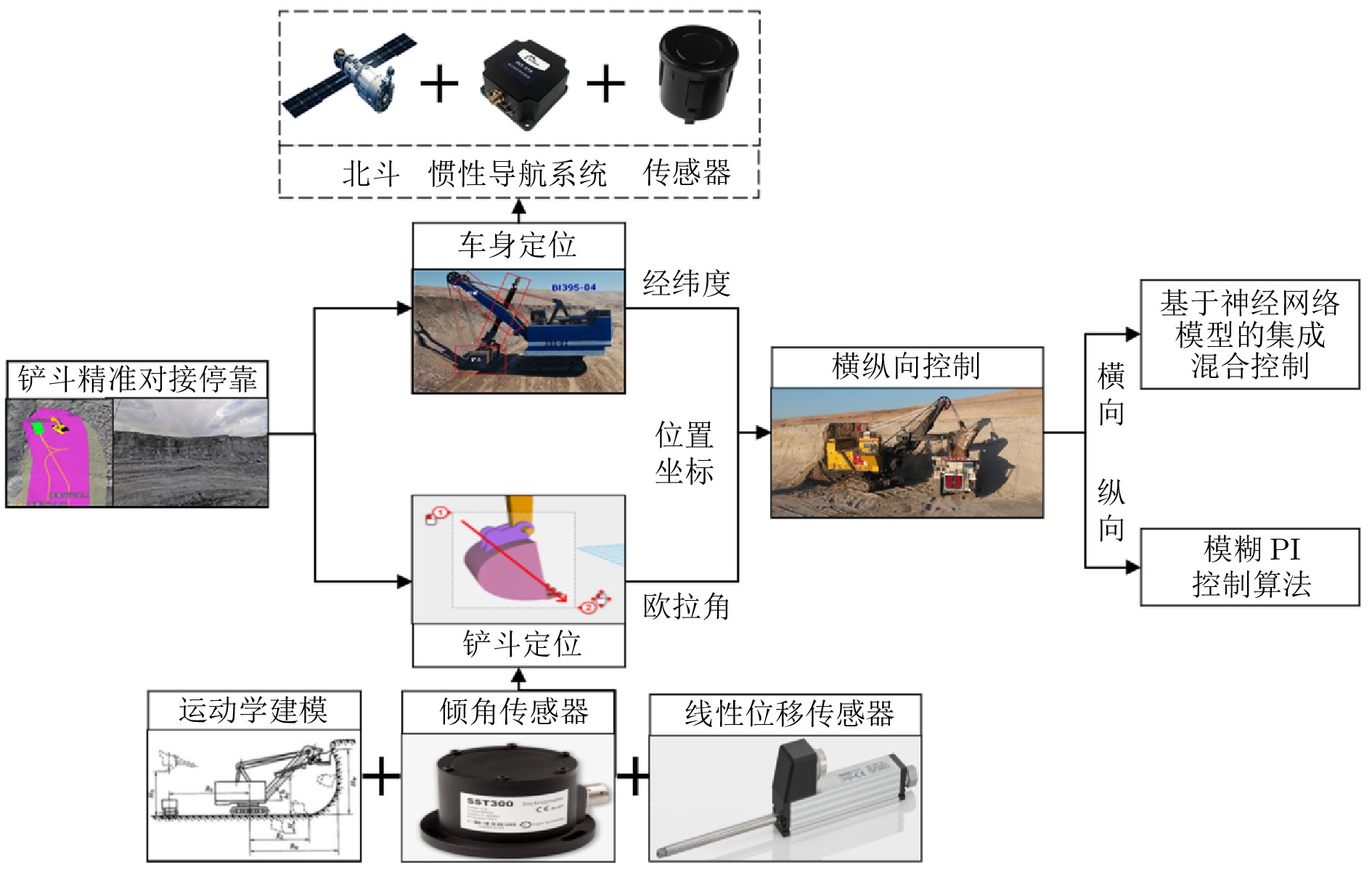
图 21 车铲多机协同技术
Fig. 21 Multi-machine collaborative technology for vehicle and bucket systems

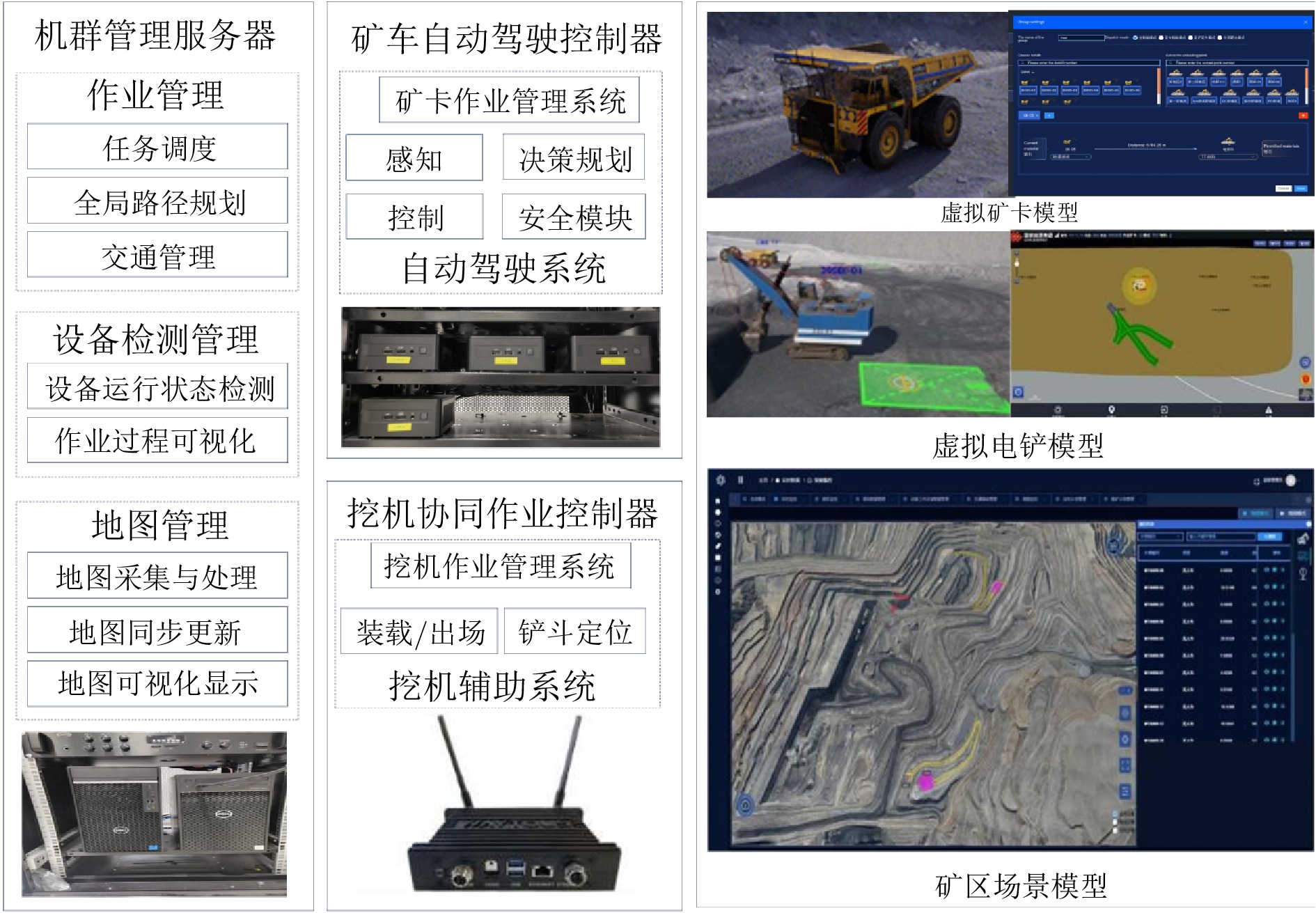
图 25 无人驾驶技术应用建设体系
Fig. 25 Framework for the application and development of autonomous driving technology

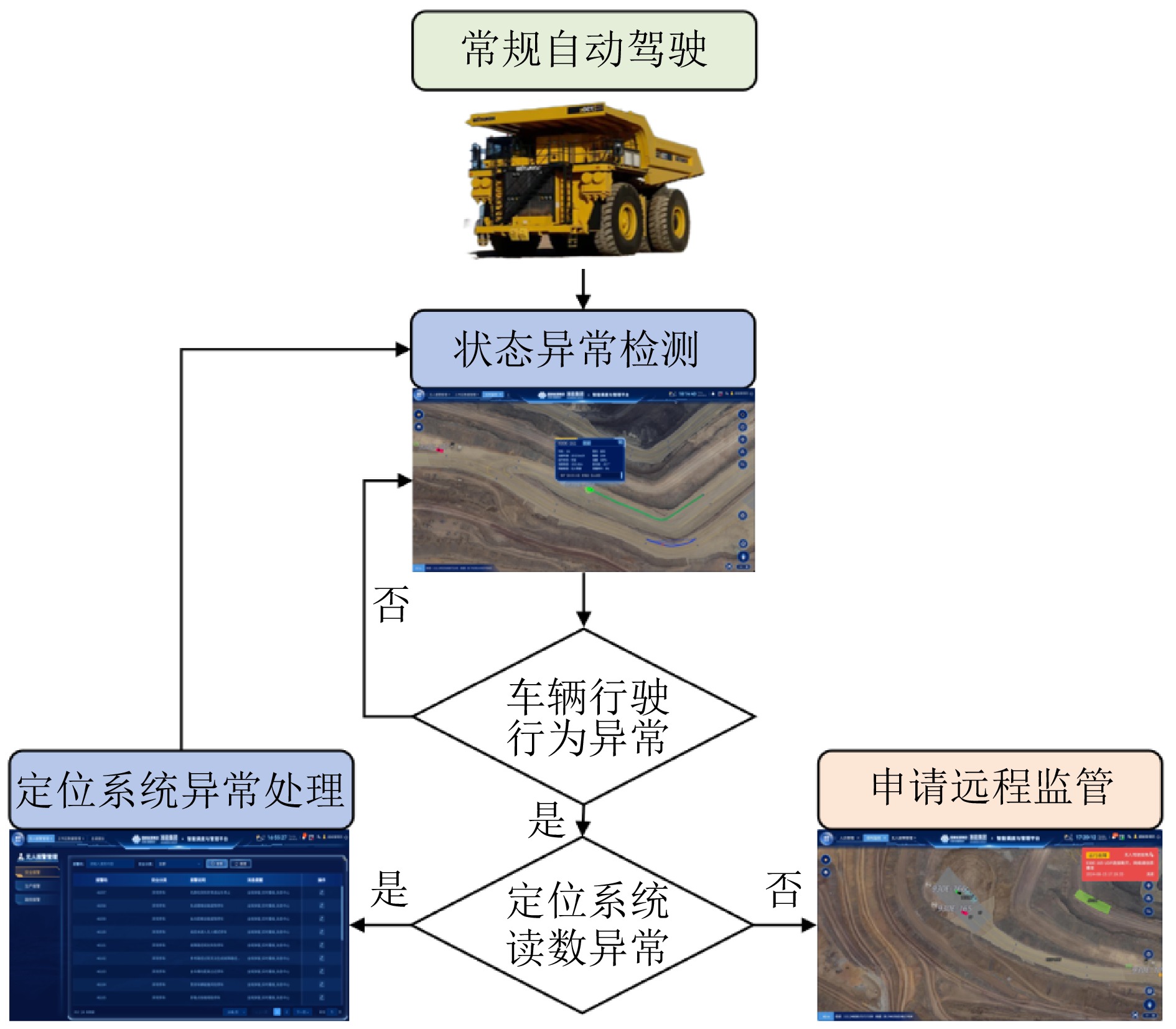
图 26 黑岱沟露天煤矿无人驾驶重型运输矿卡系统作业流程图
Fig. 26 Workflow of autonomous driving heavy-duty mining truck system at Heidaigou open-pit coal mine

图 27 特殊工况下无人驾驶重型运输矿卡现场作业图
Fig. 27 On-site operation of autonomous driving heavy-duty mining trucks under special conditions
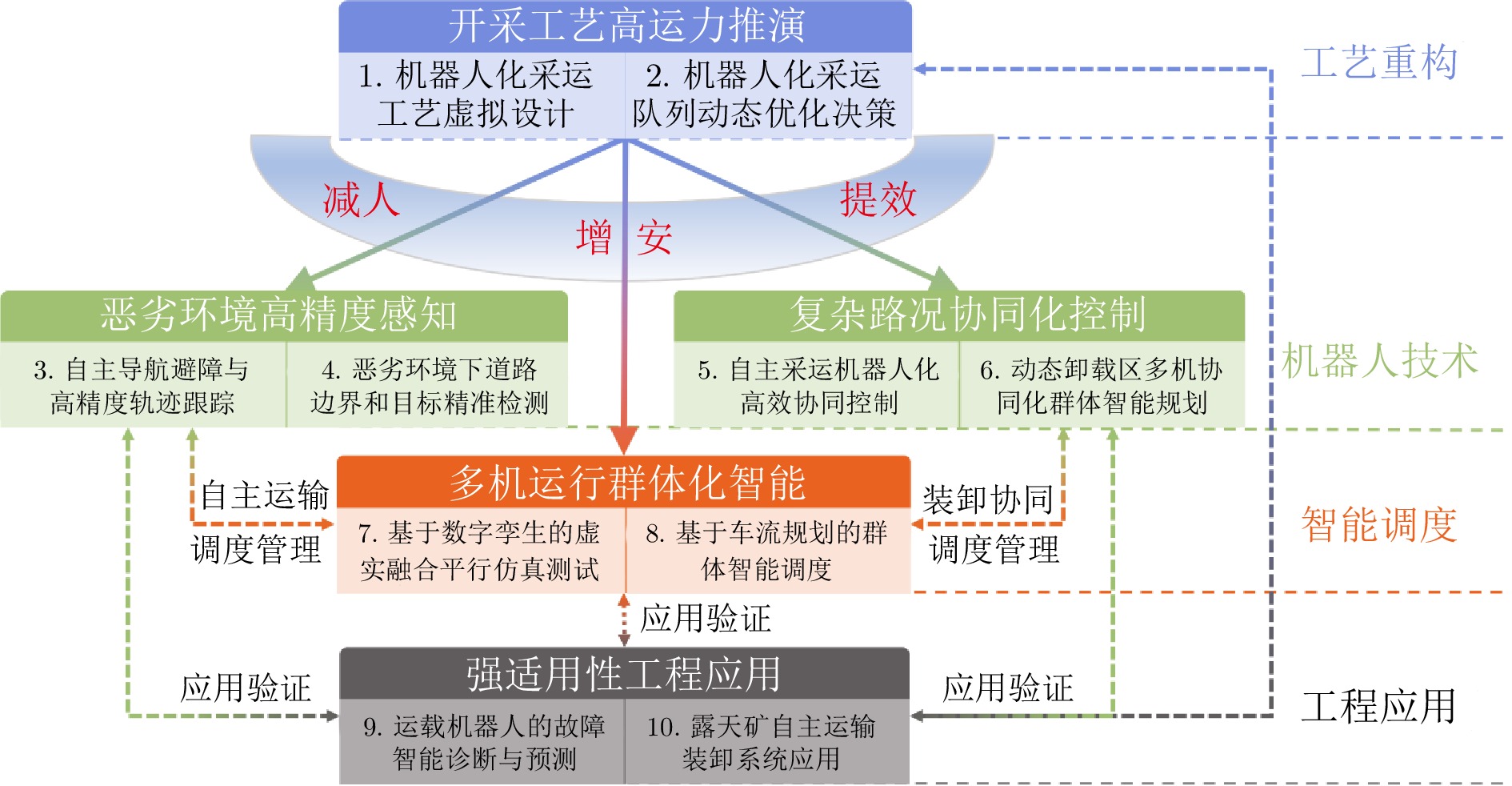
图 28 露天矿机器人化采运十项创新技术体系
Fig. 28 Ten innovative robotic mining technologies for open-pit mines
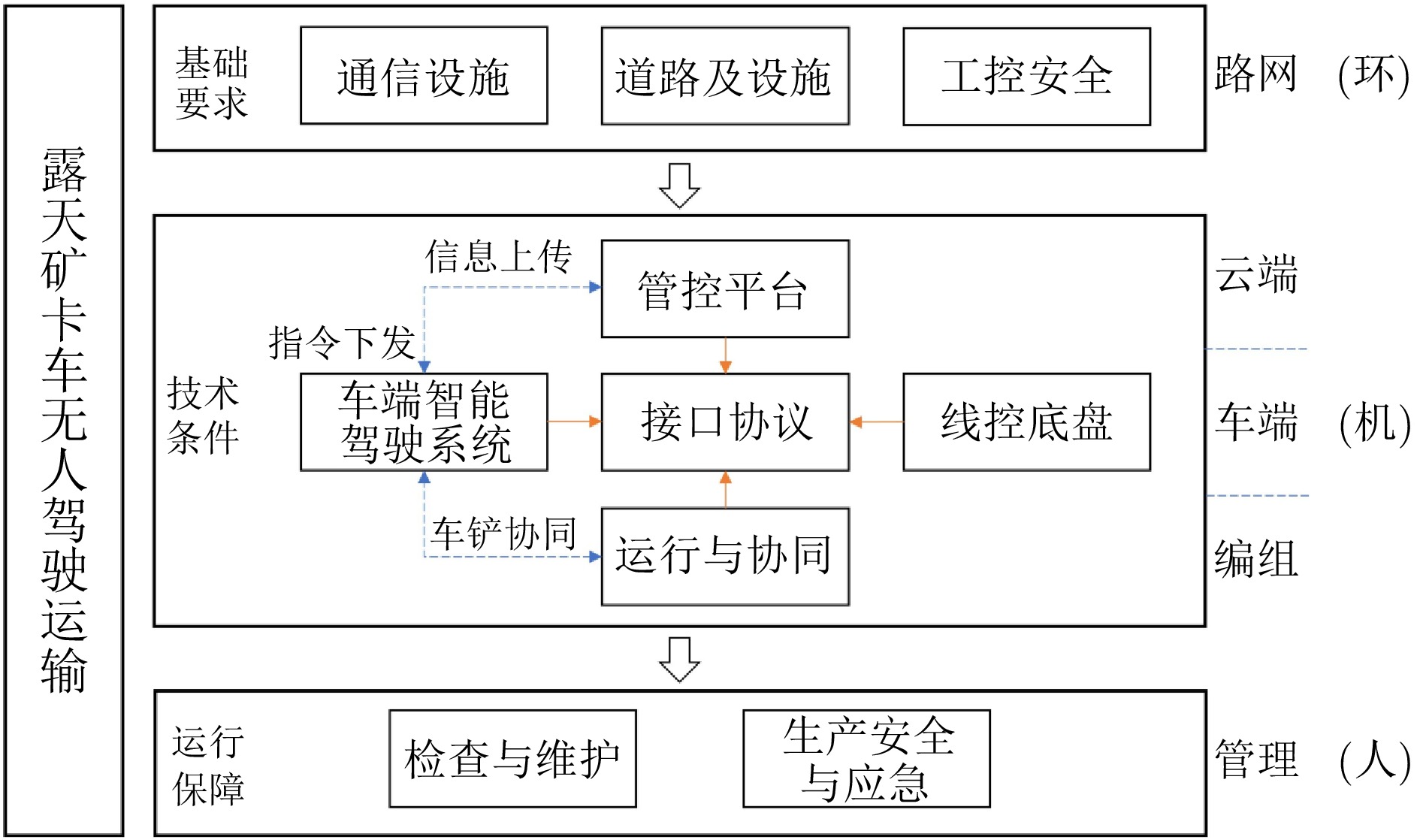
图 29 露天矿卡车无人驾驶运输技术要求标准架构
Fig. 29 Standard architecture for technical requirements for autonomous haulage systems in open-pit mining trucks
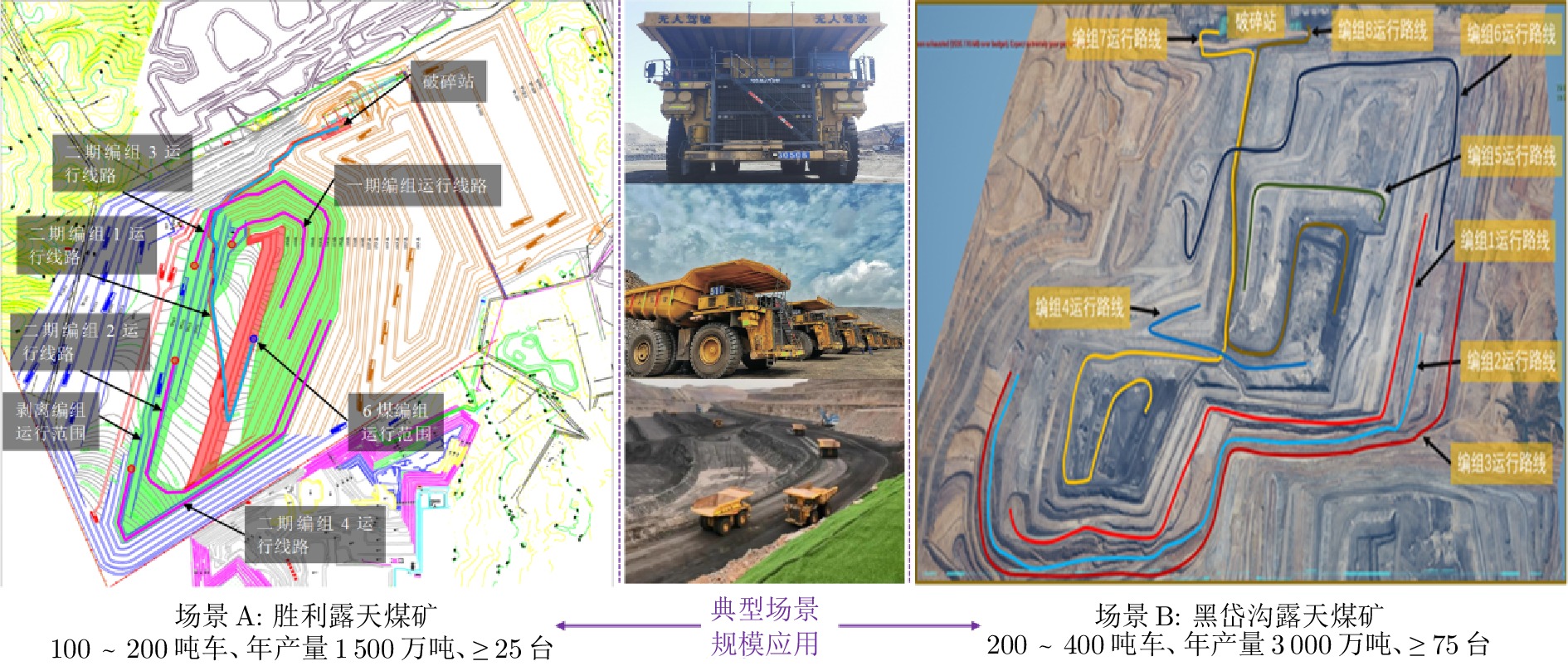
图 30 百台运输机器人运输系统编组运行示意图
Fig. 30 Schematic diagram of formation operation for a system of one hundred transportation robots
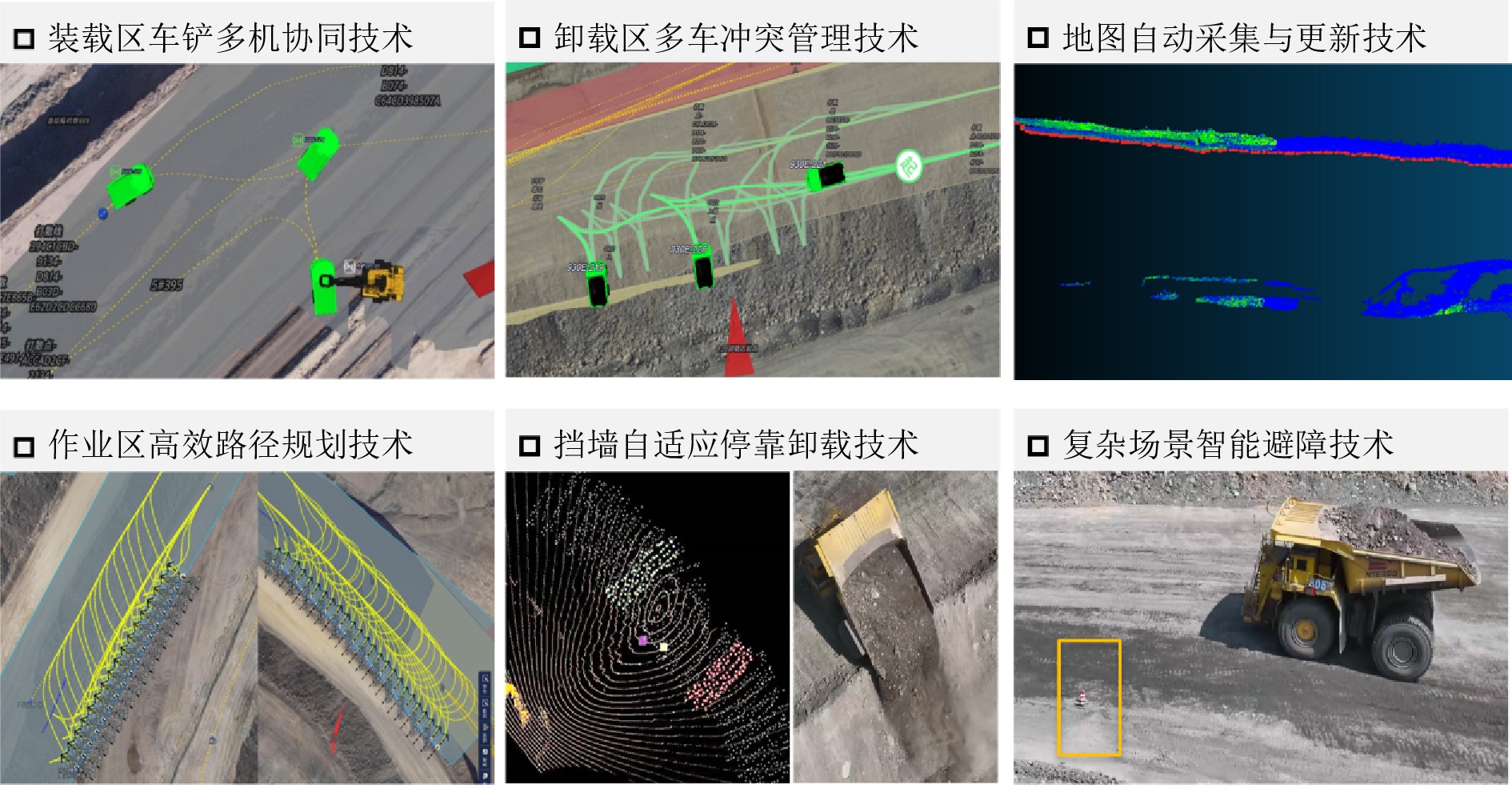
图 31 综合运输效率提升技术
Fig. 31 Technology for enhancing comprehensive transportation efficiency
-
[1] Kinnunen P H M, Kaksonen A H. Towards circular economy in mining: Opportunities and bottlenecks for tailings valorization. Journal of Cleaner Production, 2019, 228: 153−160 doi: 10.1016/j.jclepro.2019.04.171 [2] 郑南宁. 无人驾驶也需谨慎. 现代制造, 2020(13): 42Zheng Nan-Ning. Autonomous driving also requires caution. Maschinen Markt, 2020(13): 42 [3] Yang J J, Huang Q K, Ge S R, Wang X, Chen L, Guo Y N, et al. On intelligent mining with parallel intelligence. IEEE Transactions on Intelligent Vehicles, 2023, 8(10): 4296−4300 doi: 10.1109/TIV.2023.3316132 [4] Chen L, Li Y C, Huang C, Li B, Xing Y, Tian D X, et al. Milestones in autonomous driving and intelligent vehicles: Survey of surveys. IEEE Transactions on Intelligent Vehicles, 2023, 8(2): 1046−1056 doi: 10.1109/TIV.2022.3223131 [5] 杨沐岩. 矿山无人驾驶渐成“新常态”. 中国能源报, 2025-05-12 (007)Yang Mu Yan. Autonomous haulage is establishing itself as the “new normal” in mining. China Energy News, 2025-05-12 (007 [6] 葛世荣, 张晞, 薛光辉, 任怀伟, 王宏伟, 庞义辉, 等. 我国煤矿煤机智能技术与装备发展研究. 中国工程科学, 2023, 25(5): 146−156 doi: 10.15302/J-SSCAE-2023.05.013Ge Shi-Rong, Zhang Xi, Xue Guang-Hui, Ren Huai-Wei, Wang Hong-Wei, Pang Yi-Hui, et al. Development of intelligent technologies and machinery for coal mining in China's underground coal mines. Strategic Study of CAE, 2023, 25(5): 146−156 doi: 10.15302/J-SSCAE-2023.05.013 [7] 葛世荣, 胡而已, 裴文良. 煤矿机器人体系及关键技术. 煤炭学报, 2020, 45(1): 455−463 doi: 10.13225/j.cnki.jccs.YG19.1478Ge Shi-Rong, Hu Er-Yi, Pei Wen-Liang. Classification system and key technology of coal mine robot. Journal of China Coal Society, 2020, 45(1): 455−463 doi: 10.13225/j.cnki.jccs.YG19.1478 [8] 鲍久圣, 任强, 葛世荣, 魏聪, 陈超. 露天矿自卸汽车大坡度提升系统设计研究. 煤炭技术, 2019, 38(9): 145−150 doi: 10.13301/j.cnki.ct.2019.09.048Bao Jiu-Sheng, Ren Qiang, Ge Shi-Rong, Wei Cong, Chen Chao. Design of large slope hoisting system for dump truck in open-pit mine. Coal Technology, 2019, 38(9): 145−150 doi: 10.13301/j.cnki.ct.2019.09.048 [9] 王肖, 李克强, 王建强, 徐友春. 基于三维激光雷达的智能车辆目标参数辨识. 汽车工程, 2016, 38(9): 1146−1152 doi: 10.19562/j.chinasae.qcgc.2016.09.017Wang Xiao, Li Ke-Qiang, Wang Jian-Qiang, Xu You-Chun. Parameter identification of intelligent vehicle target based on 3D laser radar. Automotive Engineering, 2016, 38(9): 1146−1152 doi: 10.19562/j.chinasae.qcgc.2016.09.017 [10] 栾博钰, 周伟. 露天煤矿无人驾驶下交叉口协调通行策略研究. 煤炭学报, 2023, 48(S1): 357−367Luan Bo-Yu, Zhou Wei. Study of coordinated access strategy at intersections in open-pit coal mines with unmanned trucks. Journal of China Coal Society, 2023, 48(S1): 357−367 [11] Chen C Y, Xu Q, Cai M C, Wang J W, Wang J Q, Li K Q. Conflict-free cooperation method for connected and automated vehicles at unsignalized intersections: Graph-based modeling and optimality analysis. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 21897−21914 doi: 10.1109/TITS.2022.3182403 [12] Berkhahn V, Kleiber M, Langner J, Timmermann C, Weber S. Traffic dynamics at intersections subject to random misperception. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(5): 4501−4511 doi: 10.1109/TITS.2020.3045480 [13] Fang S S, Li H. Multi-vehicle cooperative simultaneous LiDAR SLAM and object tracking in dynamic environments. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(9): 11411−11421 doi: 10.1109/TITS.2024.3360259 [14] Ngo H, Fang H, Wang H G. Cooperative perception with V2V communication for autonomous vehicles. IEEE Transactions on Vehicular Technology, 2023, 72(9): 11122−11131 doi: 10.1109/TVT.2023.3264020 [15] Li J L, Xu R S, Liu X Y, Ma J, Chi Z C, Ma J Q, et al. Learning for vehicle-to-vehicle cooperative perception under lossy communication. IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2650−2660 doi: 10.1109/TIV.2023.3260040 [16] 王祝, 徐广通, 龙腾. 基于定制内点法的多无人机协同轨迹规划. 自动化学报, 2023, 49(11): 2374−2385 doi: 10.16383/j.aas.c200361Wang Zhu, Xu Guang-Tong, Long Teng. Customized interior-point method for cooperative trajectory planning of multiple unmanned aerial vehicles. Acta Automatica Sinica, 2023, 49(11): 2374−2385 doi: 10.16383/j.aas.c200361 [17] Wang K Z, Wang Y F, Wang L, Du H P, Nam K. Distributed intersection conflict resolution for multiple vehicles considering longitudinal-lateral dynamics. IEEE Transactions on Vehicular Technology, 2021, 70(5): 4166−4177 doi: 10.1109/TVT.2021.3072629 [18] 朱永薪, 李永福, 朱浩, 于树友. 通信延时环境下基于观测器的智能网联车辆队列分层协同纵向控制. 自动化学报, 2023, 49(8): 1785−1798 doi: 10.16383/j.aas.c210311Zhu Yong-Xin, Li Yong-Fu, Zhu Hao, Yu Shu-You. Observer-based longitudinal control for connected and automated vehicles platoon subject to communication delay. Acta Automatica Sinica, 2023, 49(8): 1785−1798 doi: 10.16383/j.aas.c210311 [19] 王峰, 黄子路, 韩孟臣, 邢立宁, 王凌. 基于KnCMPSO算法的异构无人机协同多任务分配. 自动化学报, 2023, 49(2): 399−414 doi: 10.16383/j.aas.c210696Wang Feng, Huang Zi-Lu, Han Meng-Chen, Xing Li-Ning, Wang Ling. A knee point based coevolution multi-objective particle swarm optimization algorithm for heterogeneous UAV cooperative multi-task allocation. Acta Automatica Sinica, 2023, 49(2): 399−414 doi: 10.16383/j.aas.c210696 [20] Faroni M, Umbrico A, Beschi M, Orlandini A, Cesta A, Pedrocchi N. Optimal task and motion planning and execution for multiagent systems in dynamic environments. IEEE Transactions on Cybernetics, 2024, 54(6): 3366−3377 doi: 10.1109/TCYB.2023.3263380 [21] Azadi N, Mirzaei-Nasirabad H, Mousavi A. A genetic algorithm scheme for large scale open-pit mine production scheduling. Mining Technology: Transactions of the Institutions of Mining and Metallurgy, 2023, 132(4): 225−236 doi: 10.1080/25726668.2023.2228071 [22] Huo D, Sari Y A, Zhang Q. Smart dispatching for low-carbon mining fleet: A deep reinforcement learning approach. Journal of Cleaner Production, 2024, 435: Article No. 140459 doi: 10.1016/j.jclepro.2023.140459 [23] Zhang X T, Xiong G, Ai Y F, Liu K H, Chen L. Vehicle dynamic dispatching using curriculum-driven reinforcement learning. Mechanical Systems and Signal Processing, 2023, 204: Article No. 110698 doi: 10.1016/j.ymssp.2023.110698 [24] 陈博言, 沈晴霓, 张晓磊, 张鑫, 李聪, 吴中海. 智能网联汽车的车载网络攻防技术研究进展. 软件学报, 2025, 36(1): 341−370 doi: 10.13328/j.cnki.jos.007196Chen Bo-Yan, Shen Qing-Ni, Zhang Xiao-Lei, Zhang Xin, Li Cong, Wu Zhong-Hai. Research progress on attacks and defenses technologies for in-vehicle network of intelligent connected vehicle. Journal of Software, 2025, 36(1): 341−370 doi: 10.13328/j.cnki.jos.007196 [25] 方万胜, 黄金, 金涛. 基于数字证书的智能网联汽车安全认证技术研究. 道路交通科学技术, 2022(6): 46−51Fang Wan-Sheng, Huang Jin, Jin Tao. Research on security authentication technology for intelligent connected vehicles based on digital certificates. Road Traffic Science & Technology, 2022(6): 46−51 [26] 江枫. 基于LTE-V2X的网联车队信息安全的研究与实现 [硕士学位论文], 北京邮电大学, 中国, 2020.Jiang Feng. Research and Implementation on Information Security of the LTE-V2X Connected Platoon [Master thesis], Beijing University of Posts and Telecommunications, China, 2020. [27] 王晓燕, 杨晶晶, 黄铭, 吴季达, 彭子箫. GNSS干扰和欺骗检测研究现状与展望. 信号处理, 2023, 39(12): 2131−2152 doi: 10.16798/j.issn.1003-0530.2023.12.003Wang Xiao-Yan, Yang Jing-Jing, Huang Ming, Wu Ji-Da, Peng Zi-Xiao. Research status and prospect of GNSS jamming and spoofing detection. Journal of Signal Processing, 2023, 39(12): 2131−2152 doi: 10.16798/j.issn.1003-0530.2023.12.003 [28] 刘登越. 考虑网络攻击影响的智能网联汽车安全防御综述. 综合运输, 2024, 46(1): 79−84 doi: 10.20164/j.cnki.cn11-1197/u.2024.01.014Liu Deng-Yue. A review of security defense of connected automated vehicle considering the impact of cyberattack. China Transportation Review, 2024, 46(1): 79−84 doi: 10.20164/j.cnki.cn11-1197/u.2024.01.014 [29] 陈俊平, 张益泽, 于超, 丁君生. 北斗卫星导航系统精密定位报告算法与性能评估. 测绘学报, 2022, 51(4): 511−521Chen Jun-Ping, Zhang Yi-Ze, Yu Chao, Ding Jun-Sheng. Processing algorithms and performance evaluation of BDS RDSS location reporting service. Acta Geodaetica et Cartographica Sinica, 2022, 51(4): 511−521 [30] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战. 测绘学报, 2010, 39(1): 1−6Yang Yuan-Xi. Progress, contribution and challenges of compass/Beidou satellite navigation system. Acta Geodaetica et Cartographica Sinica, 2010, 39(1): 1−6 [31] Gu Y L, Hsu L T, Kamijo S. GNSS/Onboard inertial sensor integration with the aid of 3-D building map for lane-level vehicle self-localization in urban canyon. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4274−4287 doi: 10.1109/TVT.2015.2497001 [32] Xuanyuan Z, Li B Y, Zhang X Y, Chen L, Huang K. Online cooperative 3D mapping for autonomous driving. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Changshu, China: IEEE, 2018. 256−261 [33] Bloesch M, Czarnowski J, Clark R, Leutenegger S, Davison A J. CodeSLAM-learning a compact, optimisable representation for dense visual SLAM. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, USA: IEEE, 2018. 2560−2568 [34] Koestler L, Yang N, Zeller N, Cremers D. TANDEM: Tracking and dense mapping in real-time using deep multi-view stereo. In: Proceedings of the 5th Conference on Robot Learning (CoRL). London, UK: PMLR, 2021. 34−45 [35] Mildenhall B, Srinivasan P P, Tancik M, Barron J T, Ramamoorthi R, Ng R. NeRF: Representing scenes as neural radiance fields for view synthesis. Communications of the ACM, 2022, 65(1): 99−106 doi: 10.1145/3503250 [36] Rosinol A, Leonard J J, Carlone L. NeRF-SLAM: Real-time dense monocular SLAM with neural radiance fields. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Detroit, USA: IEEE, 2023. 3437−3444 [37] Suhr J K, Jang J, Min D, Jung H G. Sensor fusion-based low-cost vehicle localization system for complex urban environments. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(5): 1078−1086 doi: 10.1109/TITS.2016.2595618 [38] Ramezani M, Khoshelham K. Vehicle positioning in GNSS-deprived urban areas by stereo visual-inertial odometry. IEEE Transactions on Intelligent Vehicles, 2018, 3(2): 208−217 doi: 10.1109/TIV.2018.2804168 [39] Liu H M, Chen M Y, Zhang G F, Bao H J, Bao Y Z. ICE-BA: Incremental, consistent and efficient bundle adjustment for visual-inertial SLAM. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Salt Lake City, USA: IEEE, 2018. 1974−1982 [40] Ye H Y, Chen Y Y, Liu M. Tightly coupled 3D lidar inertial odometry and mapping. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 3144−3150 [41] Hu A, Murez Z, Mohan N, Dudas S, Hawke J, Badrinarayanan V, et al. FIERY: Future instance prediction in bird's-eye view from surround monocular cameras. In: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). Montreal, Canada: IEEE, 2021. 15253−15262 [42] Wen Y Q, Zhao Y C, Liu Y F, Jia F, Wang Y H, Luo C, et al. Panacea: Panoramic and controllable video generation for autonomous driving. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. 6902−6912 [43] Wang Y Q, He J W, Fan L, Li H X, Chen Y T, Zhang Z X. Driving into the future: Multiview visual forecasting and planning with world model for autonomous driving. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2024. 14749−14759 [44] Caesar H, Bankiti V, Lang A H, Vora S, Liong V E, Xu Q, et al. nuScenes: A multimodal dataset for autonomous driving. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 11618−11628 [45] Liang T T, Xie H W, Yu K C, Xia Z Y, Lin Z W, Wang Y T, et al. BEVFusion: A simple and robust LiDAR-camera fusion framework. In: Proceedings of the 36th Conference on Neural Information Processing Systems (NeurIPS). New Orleans: Curran Associates Inc., 2022. Article No. 757 [46] Liu Z J, Tang H T, Amini A, Yang X Y, Mao H Z, Rus D L, et al. BEVFusion: Multi-task multi-sensor fusion with unified bird's-eye view representation. In: Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). London, UK: IEEE, 2023. 2774−2781 [47] Philion J, Fidler S. Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3D. In: Proceedings of the 16th European Conference on Computer Vision (ECCV). Glasgow, UK: Springer, 2020. 194−210 [48] Laddha A, Gautam S, Palombo S, Pandey S, Vallespi-Gonzalez C. MVFuseNet: Improving end-to-end object detection and motion forecasting through multi-view fusion of LiDAR data. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Nashville, USA: IEEE, 2021. 2859−2868 [49] Paigwar A, Baranov E, Renzaglia A, Laugier C, Legay A. Probabilistic collision risk estimation for autonomous driving: Validation via statistical model checking. In: Proceedings of the IEEE Intelligent Vehicles Symposium (IV). Las Vegas, USA: IEEE, 2020. 737−743 [50] LaValle S M, Kuffner J J. Rapidly-exploring random trees: Progress and prospects. Algorithmic and Computational Robotics. New York: CRC Press, 2001. 293−308 [51] Li Q, Wang Y, Wang Y L, Zhao H. HDMapNet: An online HD map construction and evaluation framework. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Philadelphia, USA: IEEE, 2022. 4628−4634 [52] Liao B C, Chen S Y, Wang X G, Cheng T H, Zhang Q, Liu W Y, et al. MapTR: Structured modeling and learning for online vectorized HD map construction. In: Proceedings of the 11th International Conference on Learning Representations (ICLR). Kigali, Rwanda: OpenReview.net, 2023. 1−18 [53] Zhang X T, Fu J W, Chen S T, Zheng N N. Real-time, secure, and computationally efficient navigation: A prediction-planning framework using occupancy grid map. In: Proceedings of the 26th IEEE International Conference on Intelligent Transportation Systems (ITSC). Bilbao, Spain: IEEE, 2023. 4352−4359 [54] Xiong L, Zhang Y X, Liu Y Z, Xiao H Y, Tang C. Integrated decision making and planning based on feasible region construction for autonomous vehicles considering prediction uncertainty. IEEE Transactions on Intelligent Vehicles, 2023, 8(11): 4515−4523 doi: 10.1109/TIV.2023.3299845 [55] Chen L, Hu X M, Tian W, Wang H, Cao D P, Wang F Y. Parallel planning: A new motion planning framework for autonomous driving. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 236−246 doi: 10.1109/JAS.2018.7511186 [56] 郑南宁. 人工智能新时代. 智能科学与技术学报, 2019, 1(1): 1−3Zheng Nan-Ning. The new era of artificial intelligence. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 1−3 [57] Wang T, Zhu X G, Pang J M, Lin D H. FCOS3D: Fully convolutional one-stage monocular 3D object detection. In: Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops (ICCVW). Montreal, Canada: IEEE, 2021. 913−922 [58] Lang A H, Vora S, Caesar H, Zhou L B, Yang J, Beijbom O. PointPillars: Fast encoders for object detection from point clouds. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Long Beach, USA: IEEE, 2019. 12689−12697 [59] Yin T W, Zhou X Y, Krähenbühl P. Center-based 3D object detection and tracking. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. 11779−11788 [60] Sindagi V A, Zhou Y, Tuzel O. MVX-Net: Multimodal VoxelNet for 3D object detection. In: Proceedings of the International Conference on Robotics and Automation (ICRA). Montreal, Canada: IEEE, 2019. 7276−7282 [61] Vora S, Lang A H, Helou B, Beijbom O. PointPainting: Sequential fusion for 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Seattle, USA: IEEE, 2020. 4603−4611 [62] Wang C W, Ma C, Zhu M, Yang X K. PointAugmenting: Cross-modal augmentation for 3D object detection. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Nashville, USA: IEEE, 2021. 11789−11798 [63] Liu Z, Huang T T, Li B L, Chen X W, Wang X, Bai X. EPNet++: Cascade bi-directional fusion for multi-modal 3D object detection. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(7): 8324−8341 doi: 10.1109/tpami.2022.3228806 [64] Bai X Y, Hu Z Y, Zhu X G, Huang Q Q, Chen Y L, Fu H B, et al. TransFusion: Robust LiDAR-camera fusion for 3D object detection with transformers. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). New Orleans, USA: IEEE, 2022. 1080−1089 [65] Chen L, Xie J K, Zhang X T, Deng J L, Ge S R, Wang F Y. Mining 5.0: Concept and framework for intelligent mining systems in CPSS. IEEE Transactions on Intelligent Vehicles, 2023, 8(6): 3533−3536 doi: 10.1109/TIV.2023.3285417 [66] 王飞跃. 平行控制: 数据驱动的计算控制方法. 自动化学报, 2013, 39(4): 293−302Wang Fei-Yue. Parallel control: A method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293−302 [67] Hu X M, Li S, Huang T Y, Tang B, Huai R X, Chen L. How simulation helps autonomous driving: A survey of sim2real, digital twins, and parallel intelligence. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 593−612 [68] Chen L, Li Y C, Huang C, Xing Y, Tian D X, Li L, et al. Milestones in autonomous driving and intelligent vehicles——Part I: Control, computing system design, communication, HD map, testing, and human behaviors. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(9): 5831−5847 doi: 10.1109/TSMC.2023.3276218 [69] Wang X X, Yang J, Liu Y H, Wang Y T, Wang F Y, Kang M Z, et al. Parallel intelligence in three decades: A historical review and future perspective on ACP and cyber-physical-social systems. Artificial Intelligence Review, 2024, 57(9): Article No. 255 [70] Ai Y F, Liu Y H, Gao Y, Zhao C, Cheng X, Han J P, et al. PMWorld: A parallel testing platform for autonomous driving in mines. IEEE Transactions on Intelligent Vehicles, 2024, 9(1): 1402−1411 doi: 10.1109/TIV.2023.3332739 [71] Chen L, Teng S Y, Li B, Na X X, Li Y C, Li Z X, et al. Milestones in autonomous driving and intelligent vehicles——Part II: Perception and planning. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(10): 6401−6415 doi: 10.1109/TSMC.2023.3283021 [72] Chen L, Zhang Y Q, Tian B, Ai Y F, Cao D P, Wang F Y. Parallel driving OS: A ubiquitous operating system for autonomous driving in CPSS. IEEE Transactions on Intelligent Vehicles, 2022, 7(4): 886−895 doi: 10.1109/TIV.2022.3223728 [73] Li L, Wang X, Wang K F, Lin Y L, Xin J M, Chen L, et al. Parallel testing of vehicle intelligence via virtual-real interaction. Science Robotics, 2019, 4(28): Article No. eaaw4106 doi: 10.1126/scirobotics.aaw4106 -

 下载:
下载:


计量
- 文章访问数: 1051
- HTML全文浏览量: 1373
- PDF下载量: 154
- 被引次数: 0
