

Fault-Tolerant Cooperative Formation Control for Multiple Agricultural Machines With a Human-Machine Co-driving Leader
-
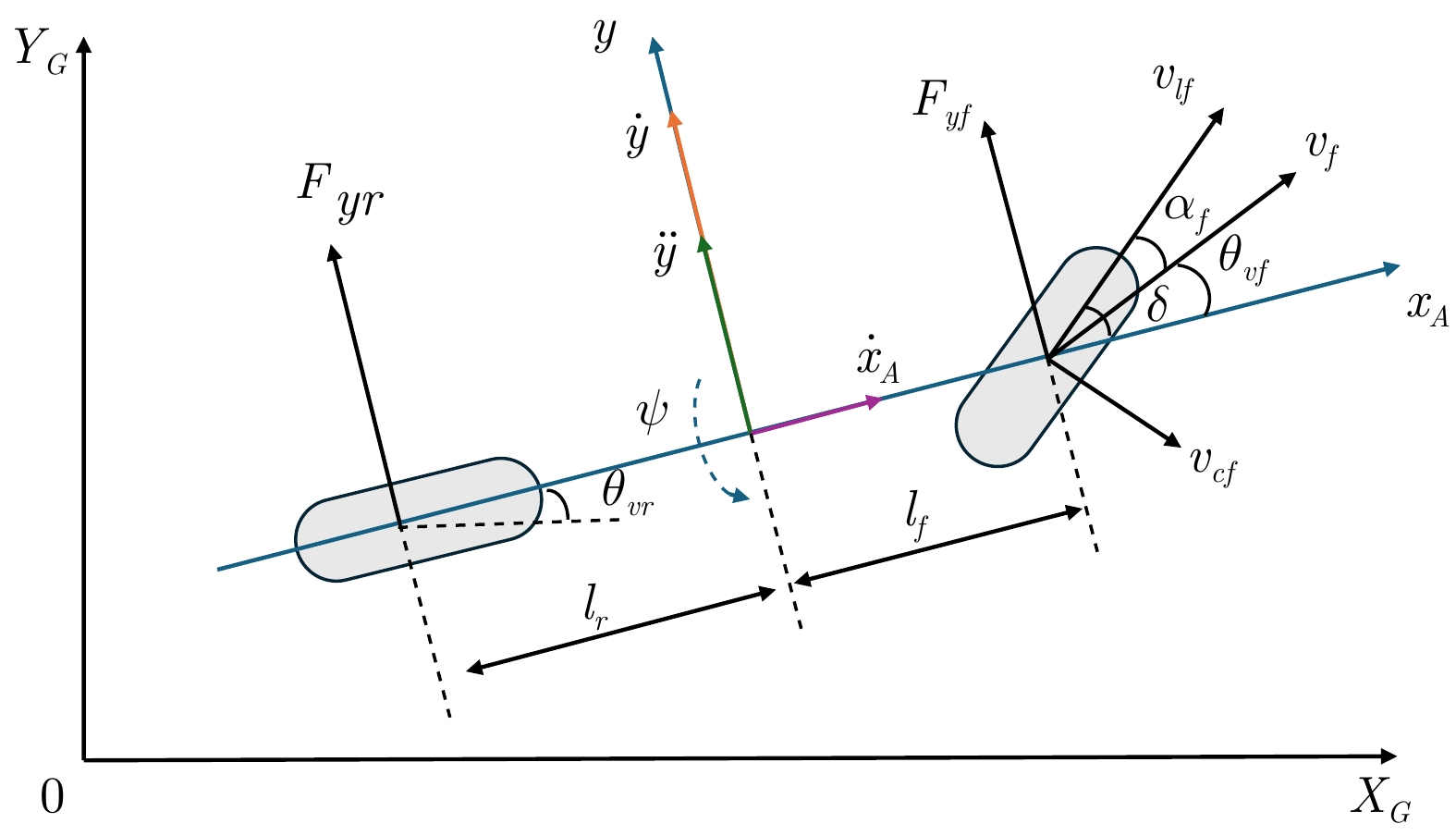
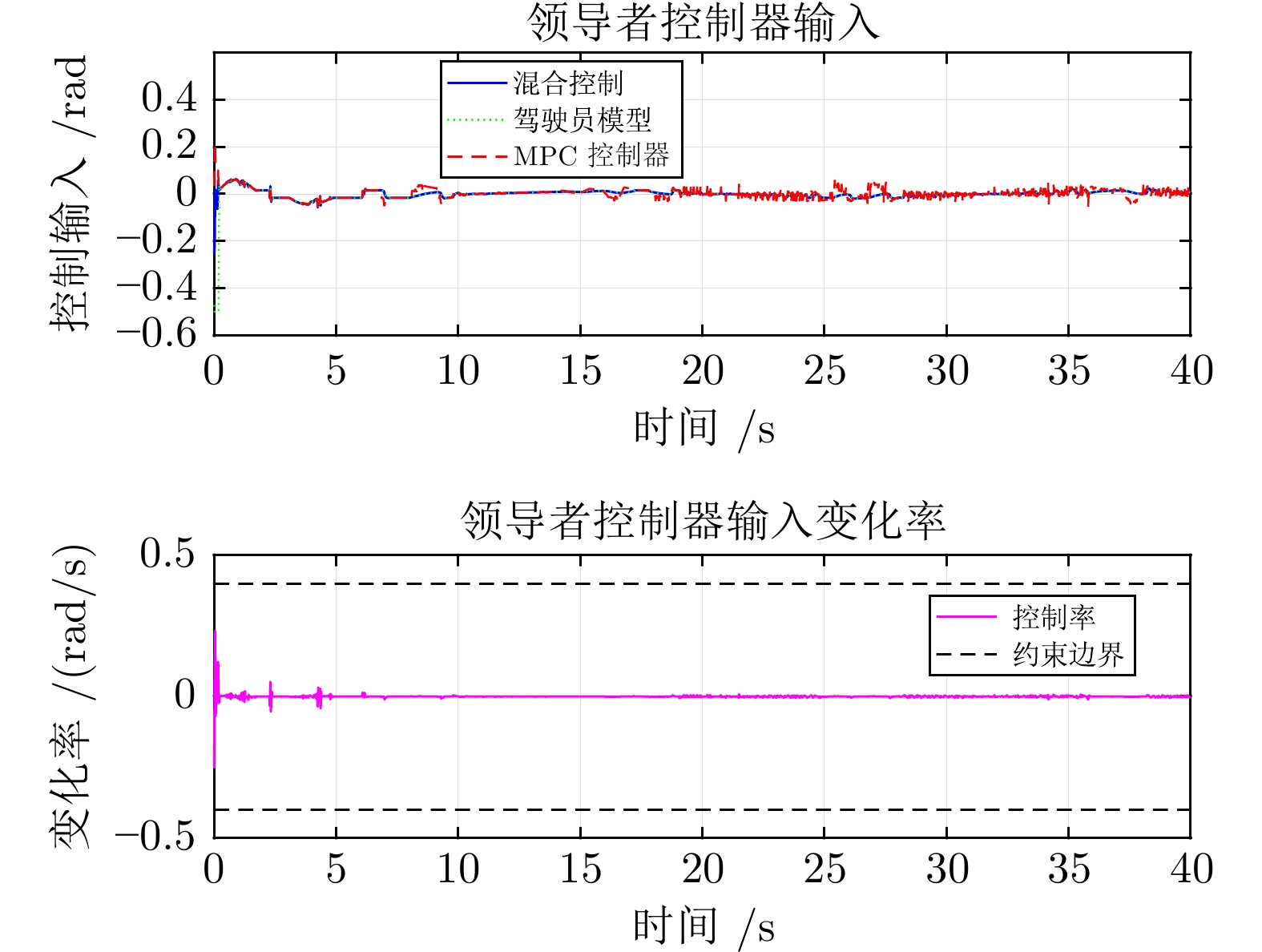
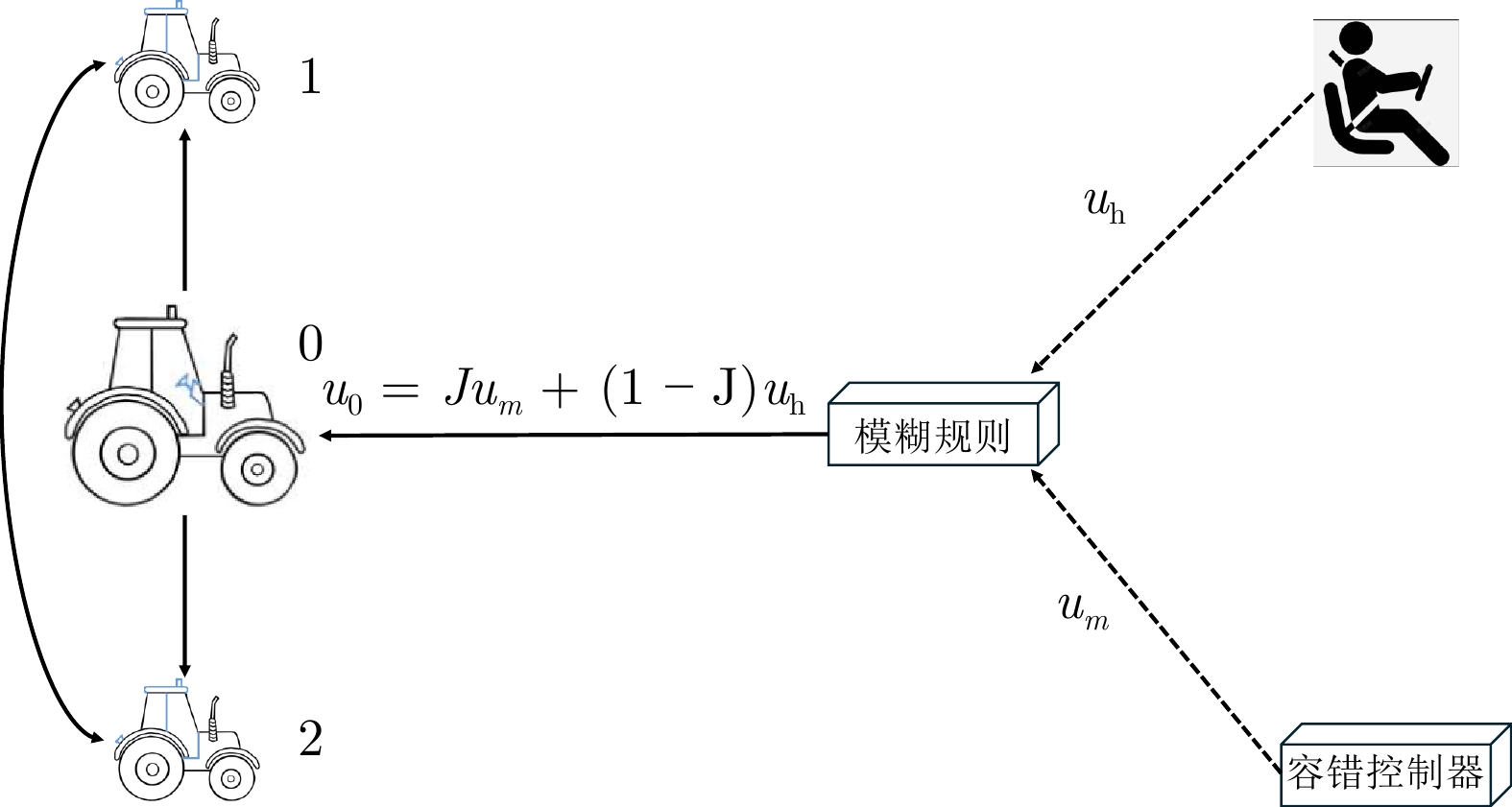
摘要: 为更好地利用人类经验并遵循人类意愿,提出一种引入人机共驾领导者的多农机容错协同编队控制方法. 首先,建立包含运动学和动力学的农机系统模型,其中领导者控制输入由驾驶员控制和驾驶辅助控制组成. 其次,结合预瞄等行为特征构建驾驶员控制模型,并基于模型预测控制设计领导者驾驶辅助控制系统,设计模糊规则动态调整驾驶员和辅助系统之间的控制权限. 然后,针对人机共驾领导者的控制输入未知的问题,基于对领导者横向速度和转向角的分布式估计,设计一种位置编队线性控制方法. 最后,通过仿真验证该方法的有效性.Abstract: To better utilize human experience and adhere to human intentions, this paper proposes a fault-tolerant cooperative formation control method for multiple agricultural machines that introduces a human-machine co-driving leader. Firstly, an agricultural machine system model incorporating kinematics and dynamics is established, where the leader's control input comprises driver control and driving assistance control. Secondly, a driver control model is constructed by integrating behavioral characteristics, such as preview. Meanwhile, a leader's driving assistance control system is designed based on model predictive control, and fuzzy rules are devised to dynamically adjust the control authority between the driver and the assistance system. Thirdly, to address the problem of unknown control input of the human-machine co-driving leader, a linear position formation control method is designed based on the distributed estimation of the leader's lateral velocity and steering angle. Finally, the effectiveness of the proposed method is verified through simulations.
-
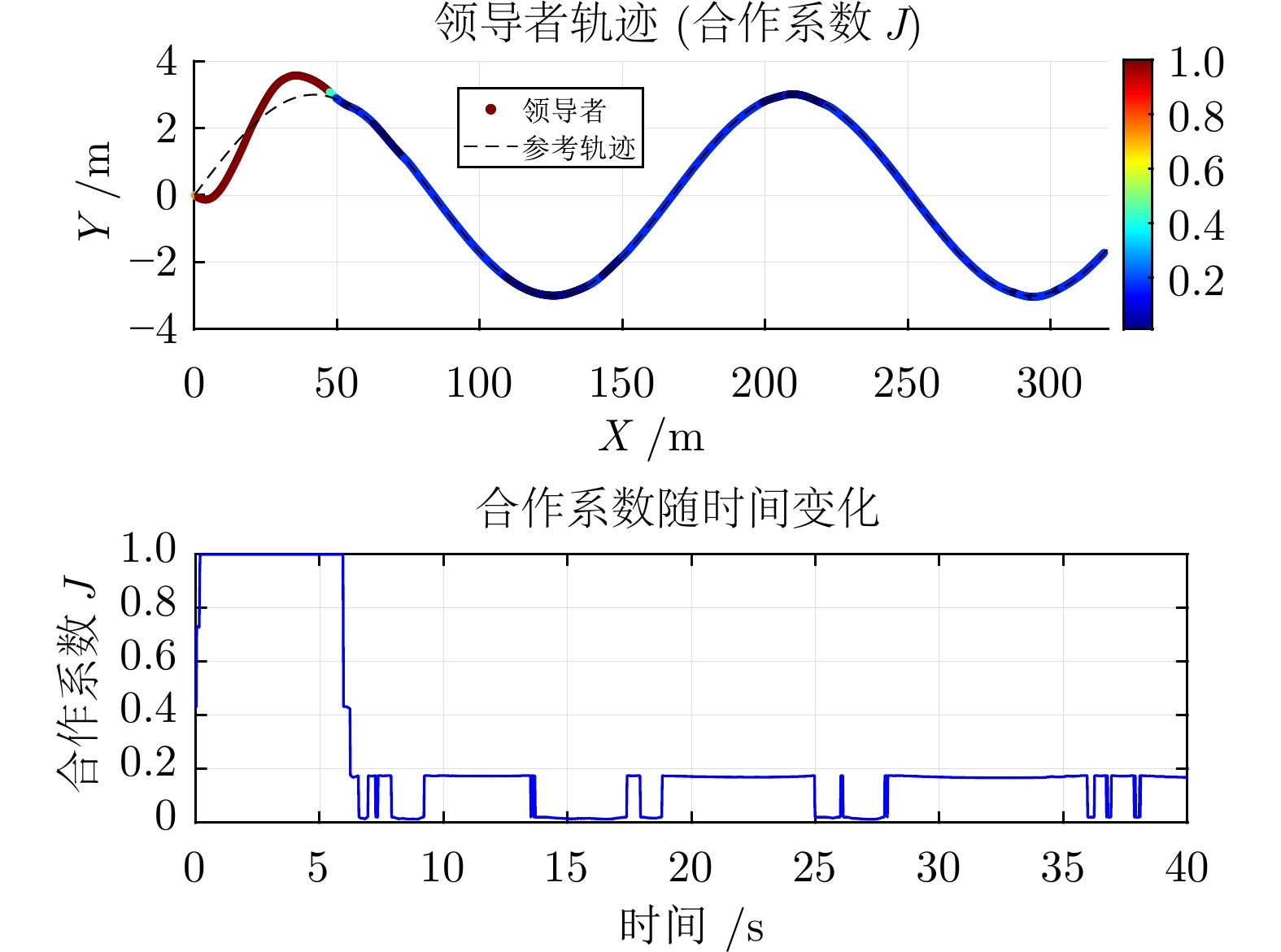
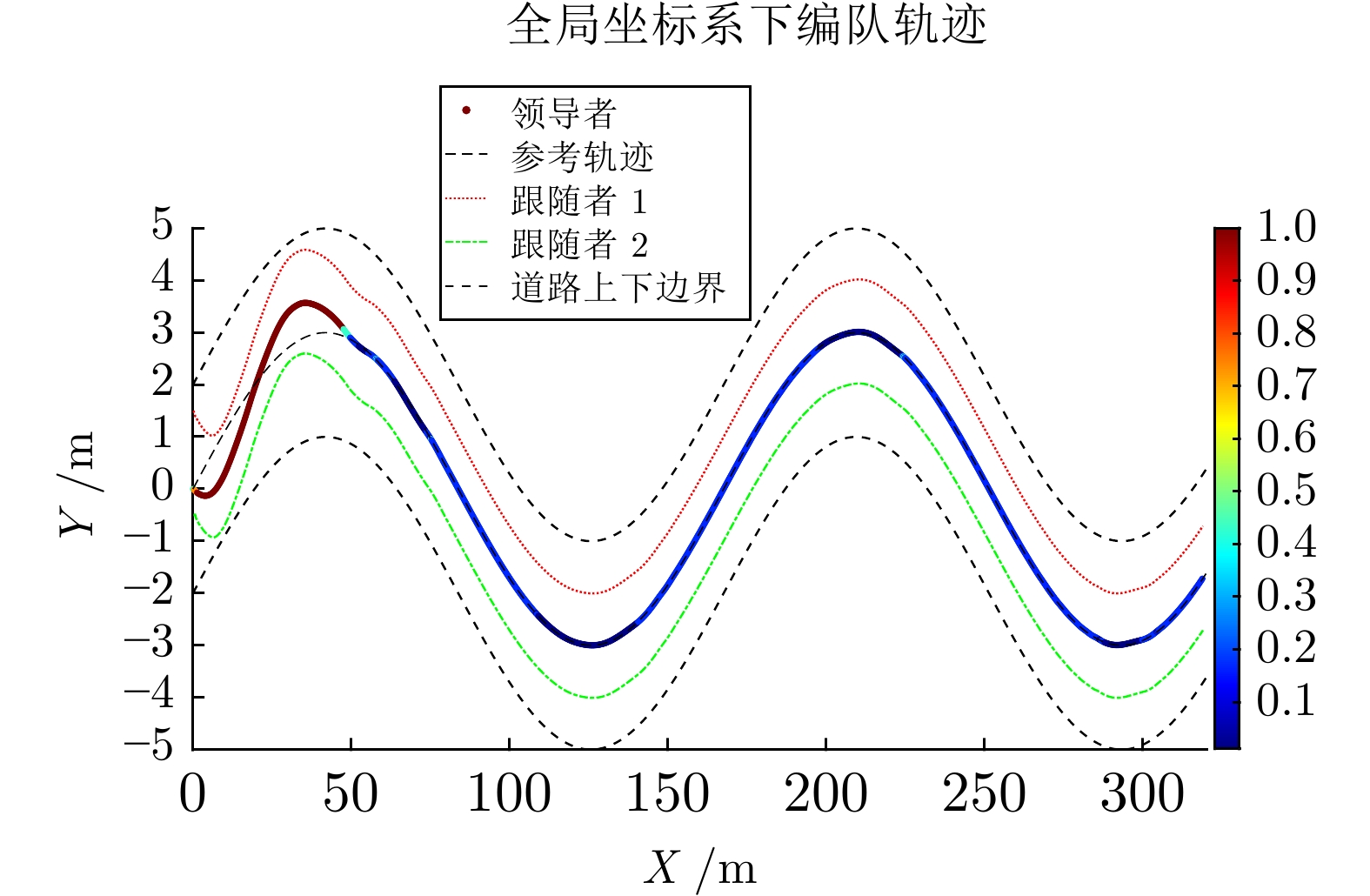
图 2 模糊规则下领导农机的跟踪效果及合作系数变化
Fig. 2 Tracking effect of leader agricultural machinery and variation of cooperation coefficient under fuzzy rules
-
[1] 尹彦鑫, 孟志军, 赵春江, 王昊, 温昌凯, 陈竞平, 等. 大田无人农场关键技术研究现状与展望. 智慧农业, 2022, 4(4): 1−25Yin Yan-Xin, Meng Zhi-Jun, Zhao Chun-Jiang, Wang Hao, Wen Chang-Kai, Chen Jing-Ping, et al. State-of-the-art and prospect of research on key technical for unmanned farms of field corp. Smart Agriculture, 2022, 4(4): 1−25 [2] Chen Hao, Wamg Xiu-Yang, Wei Chong-Feng, Hu Chuan, Zhang Xin. A dynamic path planning and tracking control of autonomous vehicles: An integrated approach using improved A*, fuzzy DWA, and fuzzy PID. IEEE Transactions on Automation Science and Engineering, 2026, 23: 2800−2813 doi: 10.1109/TASE.2026.3653413 [3] Wang H, Niu W X, Fu W Q, Ren Y X, Hu S P, Meng Z J. A low-cost tractor navigation system with changing speed adaptability. In: Proceedings of the 33rd Chinese Control and Decision Conference. Kunming, China: IEEE, 2021. 96-102 [4] 庞辉, 刘楠, 刘敏豪, 张风奇. 基于线性时变模型预测控制的自主车辆轨迹跟踪控制器设计与验证. 机械工程学报, 2022, 58(24): 264−274 doi: 10.3901/JME.2022.24.264Pang Hui, Liu Nan, Liu Min-Hao, Zhang Feng-Qi. Design and validation of trajectory tracking controller for autonomous vehicle based on linear time-varying MPC method. Journal of Mechanical Engineering, 2022, 58(24): 264−274 doi: 10.3901/JME.2022.24.264 [5] 栾世杰, 孙叶丰, 贡亮, 张凯. 基于MPC延时补偿器的农机多机器人编队行驶轨迹跟踪方法. 智慧农业, 2024, 6(3): 69−81Luan Shi-Jie, Sun Ye-Feng, Gong Liang, Zhang Kai. Trajectory tracking method for multi-robot formation driving of agricultural machinery based on MPC delay compensator. Smart Agriculture, 2024, 6(3): 69−81 [6] 李鸿一, 何兴, 王欣, 李华青, 谢守勇, 王进军. 控制科学赋能智慧农业发展的挑战性问题. 中国科学: 信息科学, 2025, 55(12): 3012−3038Li Hong-Yi, He Xing, Wang Xin, Li Hua-Qing, Xie Shou-Yong, Wang Jin-Jun. Challenging issues of control science empowering the development of smart agriculture. Scientia Sinica Informationis, 2025, 55(12): 3012−3038 [7] Chen G D, Zhou Q, Ren H R, Li H Y. Sensor-fusion-based event-triggered following control for nonlinear autonomous vehicles under sensor attacks. IEEE Transactions on Automation Science and Engineering, 2025, 22: 17411−17420 doi: 10.1109/TASE.2023.3337073 [8] Xiong H X, Chen G D, Ren H R, Li H Y. Broad-learning-system-based model-free adaptive predictive control for nonlinear MASs under DoS attacks. IEEE/CAA Journal of Automatica Sinica, 2025, 12(2): 381−393 doi: 10.1109/JAS.2024.124929 [9] Hu L, Cai H, Huang J, Cao D P, Zhang X. The challenges of driving mode switching in automated vehicles: A review. IEEE Transactions on Vehicular Technology, 2024, 73(2): 1777−1791 doi: 10.1109/TVT.2023.3319495 [10] 李永福, 黄鑫, 郭常员, 王怡然, 吴三妹, 简金埠. 面向低空交通运输的无人机-无人车协同感知技术综述. 自动化学报, 2026, 52(2): 210−229 doi: 10.16383/j.aas.c250386Li Yong-Fu, Huang Xin, Guo Chang-Yuan, Wang Yi-Ran, Wu San-Mei, Jian Jin-Bu. UAV-UGV cooperative perception for low-altitude transportation: A review. Acta Automatica Sinica, 2026, 52(2): 210−229 doi: 10.16383/j.aas.c250386 [11] Chen X, Ding W L, Zhao W Z, Wang C Y. Collaborative control of human-machine game in lateral and longitudinal dimensions considering dynamic allocation of driving authority. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025, 55(6): 4309−4321 doi: 10.1109/TSMC.2025.3549424 [12] Fang Z W, Wang J X, Wang Z J, Chen J X, Yin G D, Zhang H. Human-machine shared control for path following considering driver fatigue characteristics. IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 7250−7264 doi: 10.1109/TITS.2023.3347439 [13] Wu J, Kong Q F, Yang K M, Liu Y H, Cao D P, Li Z Y. Research on the steering torque control for intelligent vehicles co-driving with the penalty factor of human-machine intervention. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(1): 59−70 doi: 10.1109/TSMC.2022.3166991 [14] 张隆梅, 刘岗微, 齐彦栋, 杨腾祥, 金诚谦. 农业机械无人驾驶系统关键技术研究进展. 智能化农业装备学报, 2022, 3(1): 27−36 doi: 10.12398/j.issn.20967217.2022.01.004Zhang Long-Mei, Liu Gang-Wei, Qi Yan-Dong, Yang Teng-Xiang, Jin Cheng-Qian. Research progress on key technologies of agricultural machinery unmanned driving system. Journal of Intelligent Agricultural Mechanization, 2022, 3(1): 27−36 doi: 10.12398/j.issn.20967217.2022.01.004 [15] Peng X J, Wang Z, He Y, Li H Y. Leader-following consensus control of Markov switched multi-AUVs recovery system with time-varying delay. Science China Information Sciences, 2025, 68(11): Article No. 219201 doi: 10.1007/s11432-024-4535-3 [16] Kang Y, Qin J, Ma Q, Gao H, Zheng W X. Cluster synchronization for interacting clusters of nonidentical nodes via intermittent pinning control. IEEE Transactions on Neural Networks and Learning Systems, 2017, 29(5): 1747−1759 [17] Lu C X, Meng D Y, Li H Y. Data-induced learning control for unknown nonlinear systems with full-tracking performances. Science China Information Sciences, 2025, 68(8): Article No. 182201 doi: 10.1007/s11432-024-4294-0 [18] Wang Z, Jusup M, Wang R W, Shi L, Kurths J. Onymity promotes cooperation in social dilemma experiments. Science Advances, 2017, 3(3): Article No. e1601444 doi: 10.1126/sciadv.1601444 [19] Zhou Q, Yin C Y, Ma H, Ren H R, Li H Y. Prescribed performance bipartite consensus control for MASs under data-driven strategy. IEEE/CAA Journal of Automatica Sinica, 2025, 12(5): 937−946 doi: 10.1109/JAS.2024.124956 [20] Liu Y, Yao X Q, Zhao W. Distributed neural-based fault-tolerant control of multiple flexible manipulators with input saturations. Automatica, 2023, 156: Article No. 111202 doi: 10.1016/j.automatica.2023.111202 [21] Wang M, Peng X J, Li H Y, He Y. Distributed cooperative learning control for multiagent systems with data protection and disturbance observation. Science China Information Sciences, 2025, 69(1): Article No. 112201 doi: 10.1007/s11432-024-4368-3 [22] Li S, Zhang M, Wang N, Cao R, Zhang Z, Ji H, et al. Intelligent scheduling method for multi-machine cooperative operation based on NSGA-Ⅲ and improved ant colony algorithm. Computers and Electronics in Agriculture, 2023, 204: Article No. 107532 doi: 10.1016/j.compag.2022.107532 [23] Zhang P, Qiao J F, Zhang H Y. Path planning and tracking for agricultural master-slave robot system. In: Proceedings of the International Conference on Computer and Communication Technologies in Agriculture Engineering. Chengdu, China: IEEE, 2010. 55-58 [24] Chen Y Q, Xu H L, Park J H, Li Z C, Dong L W. Fully distributed fuzzy adaptive consensus for nonlinear MASs with an active leader: State and output feedback designs. IEEE Transactions on Fuzzy Systems, 2024, 32(7): 4004−4016 doi: 10.1109/TFUZZ.2024.3386924 [25] Yang Y L, Modares H, Wunsch D C, Yin Y X. Leader-follower output synchronization of linear heterogeneous systems with active leader using reinforcement learning. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(6): 2139−2153 doi: 10.1109/TNNLS.2018.2803059 [26] Li P, Jabbari F, Sun X M. Leader-follower consensus of linear multiagent systems with magnitude and rate saturation and an active leader. IEEE Transactions on Automatic Control, 2022, 68(9): 5584−5591 doi: 10.1109/tac.2022.3220558 [27] Chen G D, Yao D Y, Zhou Q, Li H Y, Lu R Q. Distributed event-triggered formation control of USVs with prescribed performance. Journal of Systems Science and Complexity, 2022, 35(3): 820−838 doi: 10.1007/s11424-021-0150-0 [28] Lei Y, Wang Z, Wang X, Li H Y, Morarescu I-C. Hybrid formation control for heterogeneous uncertain linear two-time-scale systems. Automatica, 2025, 176: Article No. 112267 doi: 10.1016/j.automatica.2025.112267 [29] Cao L, Qin Y, Pan Y N, Liang H J. Prescribed performance-based optimal formation control for USVs with position constraints and yaw angle time-varying partial constraints. IEEE Transactions on Intelligent Transportation Systems, 2025, 26(3): 4109−4121 doi: 10.1109/TITS.2024.3520328 [30] 满景涛, 曾志刚, 盛银, 来金钢. 基于ODE-PDE的大规模多智能体系统有限时间编队. 自动化学报, 2025, 51(3): 631−642Man Jing-Tao, Zeng Zhi-Gang, Sheng Yin, Lai Jin-Gang. Finite-time formation of large-scale multi-agent systems based on an ODE-PDE approach. Acta Automatic Sinica, 2025, 51(3): 631−642 [31] Sajjadi-Kia S, Jabbari F. Controllers for linear systems with bounded actuators: Slab scheduling and anti-windup. Automatica, 2013, 49(3): 762−769 doi: 10.1016/j.automatica.2012.11.018 -

 下载:
下载:

计量
- 文章访问数: 7
- HTML全文浏览量: 7
- 被引次数: 0
