

-
摘要: 本文研究多智能体系统的避碰安全控制问题, 目标是在尽量保持标称控制性能的同时, 确保任意智能体对之间始终保持安全距离. 针对二阶系统中安全约束函数相对度为2、传统控制障碍函数难以直接施加控制约束的问题, 本文引入高阶控制障碍函数框架构造碰撞避免条件, 并将其转化为最小侵入的二次规划控制器. 进一步地, 利用安全约束项的对称性, 将原本耦合的不等式约束分解为各智能体可独立求解的线性约束. 在此基础上, 本文将所提方法推广至含有不确定项的多智能体系统, 设计鲁棒控制障碍函数及构建可实现的鲁棒控制器, 并证明了系统安全集的前向不变性. 数值仿真结果表明, 所提方法可使得系统保持安全性并维持良好的跟踪性能.Abstract: This paper investigates the collision avoidance for multi-agent systems, with the objective of guaranteeing a safe distance between any pair of agents while preserving nominal control input as much as possible. For second-order systems, the safety constraint functions have relative degree two, which makes it difficult to directly impose control constraints using classical control barrier functions. To address this issue, a high-order control barrier function framework is introduced to formulate collision avoidance conditions, which are then incorporated into a minimally invasive quadratic programming controller. Furthermore, by exploiting the symmetry of the safety constraints, the originally coupled inequality constraints are decomposed into linear constraints that can be solved independently by each agent. On this basis, the proposed approach is extended to uncertain multi-agent systems. Robust control barrier functions are designed to construct a realizable controller, and the forward invariance of the system safety set is rigorously established. Numerical simulation results demonstrate that the proposed method can effectively prevent inter-agent collisions while achieving satisfactory tracking performance.
-
Key words:
- Multi-agent system /
- control barrier function /
- collision avoidance /
- robustness
-
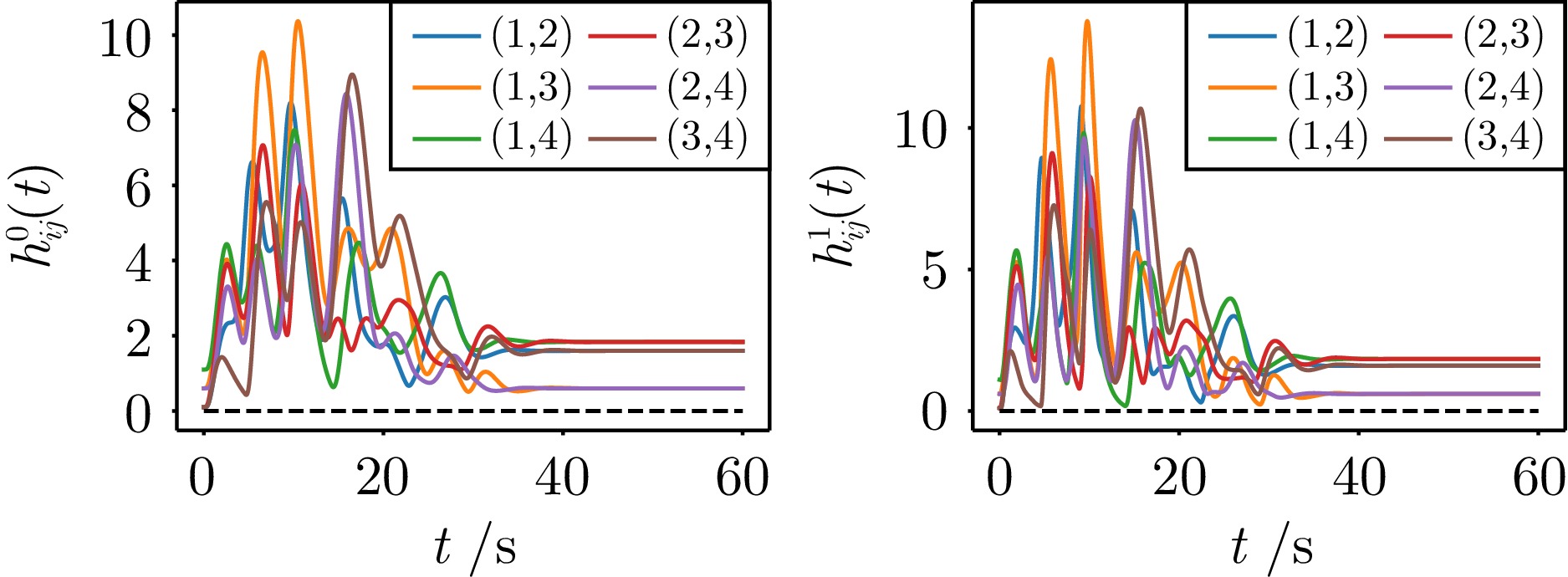
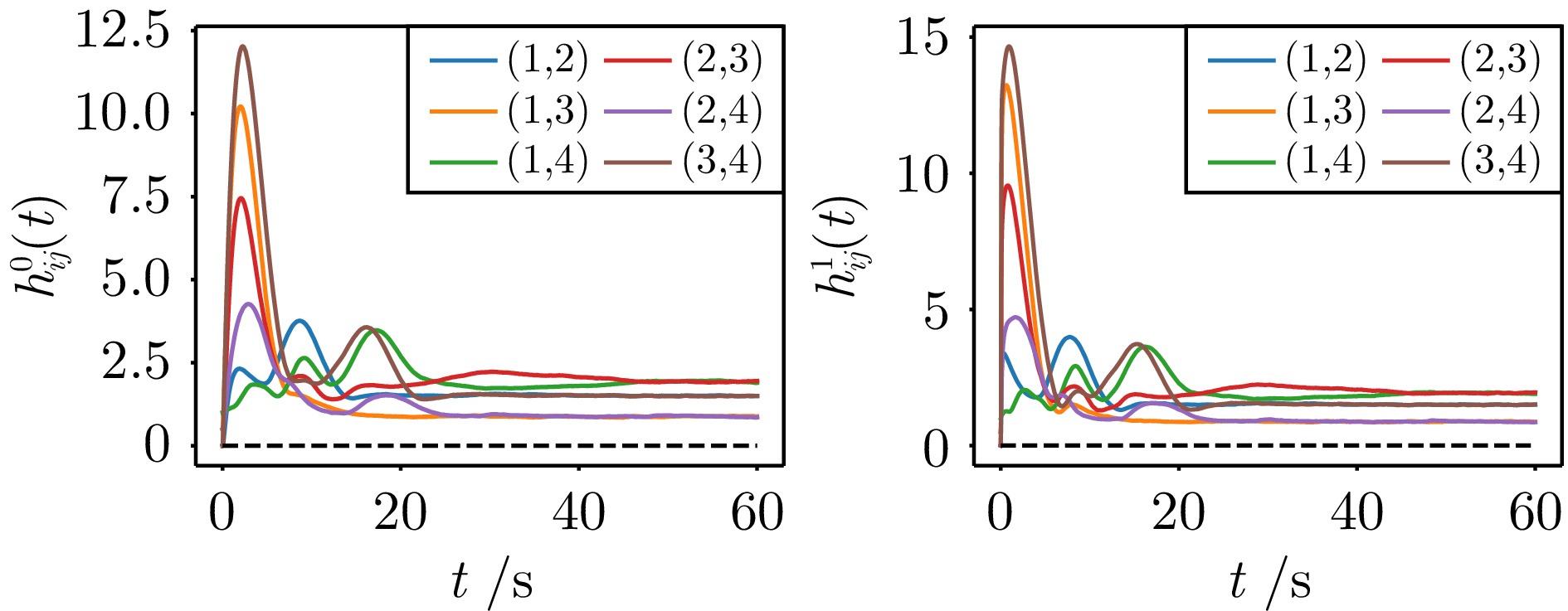
图 2 (a)智能体对$ (i,\;j) $的一阶CBF$ h_{ij}^0(t) $; (b)智能体对$ (i,\;j) $的二阶CBF$ h_{ij}^1(t) $
Fig. 2 (a) First-order CBF $ h_{ij}^0(t) $ of agent pair $ (i,\;j) $; (b) Second-order CBF $ h_{ij}^0(t) $ of agent pair $ (i,\;j) $
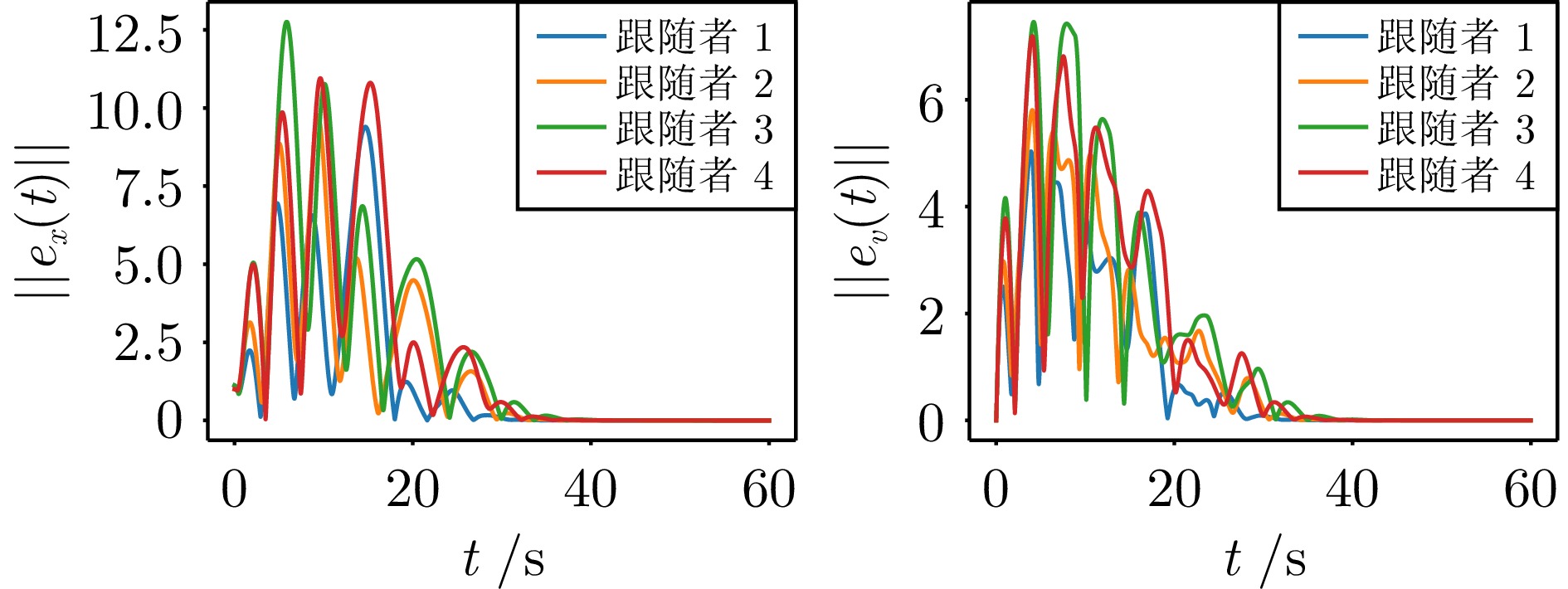
图 3 (a)编队追踪误差$ \|e_x(t)\| $; (b)速度追踪误差$ \|e_v(t)\| $
Fig. 3 (a) Formation tracking error $ \|e_x(t)\| $;(b) Velocity tracking error $ \|e_v(t)\| $
-
[1] Man J, Zeng Z. Adaptive Neural Finite-Time Deployment of Heterogeneous Multi-agent Systems via a Cross-Species Bionic PDE-ODE Approach. Artificial Intelligence Science and Engineering, 2025, 1(2): 52−63 [2] Li B, Zhao L, Wen S. Periodic Event-Triggered Consensus of Stochastic Multi-Agent Systems Under Switching Topology. Artificial Intelligence Science and Engineering, 2025, 1(2): 145−154 doi: 10.23919/aise.2025.000011 [3] Isaly A, Ghanbarpour M, Sanfelice R G, Dixon W E. On the feasibility and continuity of feedback controllers defined by multiple control barrier functions. IEEE Transactions on Automatic Control, 2024, 69(11): 7326−7339 doi: 10.1109/TAC.2024.3383069 [4] Shaw Cortez W, Oetomo D, Manzie C, Choong P. Control barrier functions for mechanical systems: theory and application to robotic grasping. IEEE Transactions on Control Systems Technology, 2021, 29(2): 530−545 doi: 10.1109/TCST.2019.2952317 [5] Zeng J, Zhang B, Sreenath K. Safety-critical model predictive control with discrete-time control barrier function. In: 2021 American Control Conference (ACC), 2021: 3882−3889. [6] Mondal A, Bhowmick C, Behera L, Jamshidi M. Trajectory tracking by multiple agents in formation with collision avoidance and connectivity assurance. IEEE Systems Journal, 2018, 12(3): 2449−2460 doi: 10.1109/JSYST.2017.2778063 [7] Lashkari N, Biglarbegian M, Yang S X. Development of a novel robust control method for formation of heterogeneous multiple mobile robots with autonomous docking capability. IEEE Transactions on Automation Science and Engineering, 2020, 17(4): 1759−1776 doi: 10.1109/TASE.2020.2977465 [8] Wisniewski R, Sloth C. Converse barrier certificate theorems. IEEE Transactions on Automatic Control, 2016, 61(5): 1356−1361 doi: 10.1109/TAC.2015.2476155 [9] Tomlin C, Pappas G J, Sastry S. Conflict resolution for air traffic management: a study in multiagent hybrid systems. IEEE Transactions on Automatic Control, 1998, 43(4): 509−521 doi: 10.1109/9.664154 [10] Wang L, Ames A D, Egerstedt M. Safety barrier certificates for collisions-free multirobot systems. IEEE Transactions on Robotics, 2017, 33(3): 661−674 doi: 10.1109/TRO.2017.2659727 [11] Fu J, Wen G, Yu X, Wu Z G. Distributed formation navigation of constrained second-order multiagent systems with collision avoidance and connectivity maintenance. IEEE Transactions on Cybernetics, 2022, 52(4): 2149−2162 doi: 10.1109/TCYB.2020.3000264 [12] Wen G, Fu J, Wang B, Wang X, Shen H. Robust Formation Tracking of ASVs With Nonconservative Collision Avoidance: A Control Barrier Function-Based Approach. IEEE Transactions on Industrial Electronics, doi: 10.1109/TIE.2025.3649849. [13] Chen Y, Singletary A, Ames A D. Guaranteed obstacle avoidance for multi-robot operations with limited actuation: a control barrier function approach. IEEE Control Systems Letters, 2021, 5(1): 127−132 doi: 10.1109/LCSYS.2020.3000748 [14] Fu J, Wen G, Yu X. Safe consensus tracking with guaranteed full state and input constraints: a control barrier function-based approach. IEEE Transactions on Automatic Control, 2023, 68(12): 8075−8081 doi: 10.1109/TAC.2023.3283697 [15] Yan S, Shi L, Zhang H, Yao S, Zhou Y. Safety-critical model-free adaptive iterative learning control for multi-agent consensus using control barrier functions. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2024, 71(1): 221−225 doi: 10.1109/TCSII.2023.3300978 [16] Chen G. Optimal Synchronization of Higher-Order Dynamical Networks. Artificial Intelligence Science and Engineering, 2025, 1(2): 31−36 doi: 10.23919/aise.2025.000003 [17] Hsu S C, Xu X, Ames A D. Control barrier function based quadratic programs with application to bipedal robotic walking. In: 2015 American Control Conference (ACC), 2015: 4542−4548. [18] Xu X. Constrained control of input-output linearizable systems using control sharing barrier functions. Automatica, 2018, 87: 195−201 doi: 10.1016/j.automatica.2017.10.005 [19] Xiao W, Belta C. Control barrier functions for systems with high relative degree. In: 2019 IEEE 58th Conference on Decision and Control (CDC), 2019: 474−479. [20] Ames A D, Xu X, Grizzle J W, Tabuada P. Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 2017, 62(8): 3861−3876 doi: 10.1109/TAC.2016.2638961 [21] Sastry S. Nonlinear systems: analysis, stability, and control. Springer Science & Business Media, 2013. [22] Lindemann L, Dimarogonas D V. Control barrier functions for signal temporal logic tasks. IEEE Control Systems Letters, 2019, 3(1): 96−101 doi: 10.1109/LCSYS.2018.2853182 [23] Tan X, Cortez W S, Dimarogonas D V. High-order barrier functions: robustness, safety, and performance-critical control. IEEE Transactions on Automatic Control, 2022, 67(6): 3021−3028 doi: 10.1109/TAC.2021.3089639 [24] Li B, Guo Z, Hu C, Zhu S, Wen S. Safe Formation Control of Uncertain Multiagent Systems from a Bayesian Perspective. IEEE Transactions on Automatic Control, 2025, 70(3): 1929−1934 doi: 10.1109/TAC.2024.3470928 -

 下载:
下载:

计量
- 文章访问数: 13
- HTML全文浏览量: 8
- 被引次数: 0
