

MIMO Ultra-local Model-based Optimal Prescribed Time and Precision Control for Mechatronic Systems Subject to Multiple Input Nonlinearities
-
摘要: 针对受多重输入非线性影响的机电系统轨迹跟踪问题, 提出一种MIMO无模型最优预设时间和精度控制方法. 首先, 为实现无模型控制, 提出分数阶MIMO极局部模型在极小时间窗口内重构被控系统; 进而基于准时延估计和分数阶滑模控制提出MIMO无模型分数阶控制. 然后, 引入不受初值影响的改进性能函数, 实现对跟踪误差的预设时间和精度约束, 并设计有限时间控制稳定闭环系统, 进而提出MIMO无模型分数阶预设性能有限时间控制. 进一步, 使用海洋捕食者算法优化控制输入增益矩阵参数. 最后, 使用李雅普诺夫方法证明了闭环系统稳定性. 应用于三自由度机械臂的联合仿真表明, 所提方法的平均IAE性能指标相比于基于特征建模的智能自适应控制和无模型预设性能固定时间控制分别减小88.1%和62.1%. 此外相较于矩阵参数人工整定和灰狼优化, 经海洋捕食者算法优化后所提方法的平均IAE性能指标分别能降低74.6%和53.6%. 最后, 应用于七自由度外骨骼的联合仿真进一步验证了所提方法在更复杂系统中的有效性.Abstract: Aiming at the trajectory tracking issue of mechatronic systems subject to multiple input nonlinearities, a MIMO model-free optimal prescribed time and precision control method is proposed. Firstly, to achieve model-free control, a fractional-order MIMO ultra-local model is proposed to re-formulate the controlled system within an extra-short time window; Then, based on a quasi-time delay estimation and a fractional-order sliding mode control, a MIMO model-free fractional-order control is proposed. Later, an improved performance function which is not affected by the initial value is employed to achieve prescribed time and precision constraints on tracking error, and a finite-time control is designed to stabilize the closed-loop system. Correspondingly, a MIMO model-free fractional-order prescribed performance finite-time control is proposed. Furthermore, a marine predators algorithm is used to optimize the control input gain matrix parameters. Finally, the Lyapunov method is utilized to prove the stability of the closed-loop system. Co-simulations applied to a 3-DOF manipulator show that the average IAE performance index of the proposed method is decreased by 88.1% and 62.1% compared to characteristic modeling-based intelligent adaptive control and model-free prescribed performance fixed-time control, respectively. Additionally, compared to manual tuning and grey wolf optimizer of matrix parameters, the average IAE performance index of the proposed method can be reduced by 74.6% and 53.6% after optimization using a marine predators algorithm. Finally, co-simulations applied to a 7-DOF exoskeleton further validate the effectiveness of the proposed method in more complex systems.
-
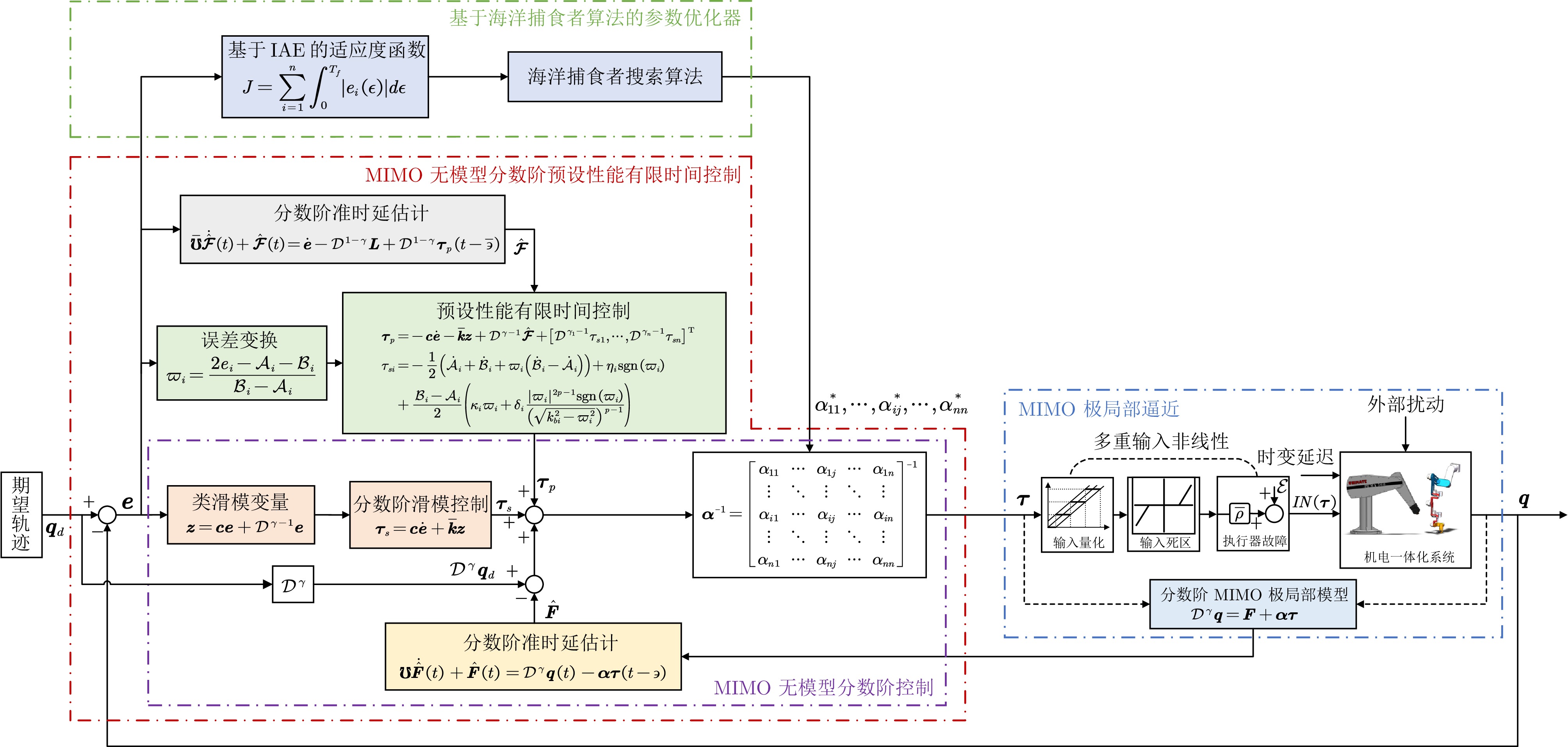
图 2 MIMO无模型分数阶最优预设性能有限时间控制结构框图
Fig. 2 The block diagram of MIMO model-free fractional-order optimal prescribed performance finite-time control structure
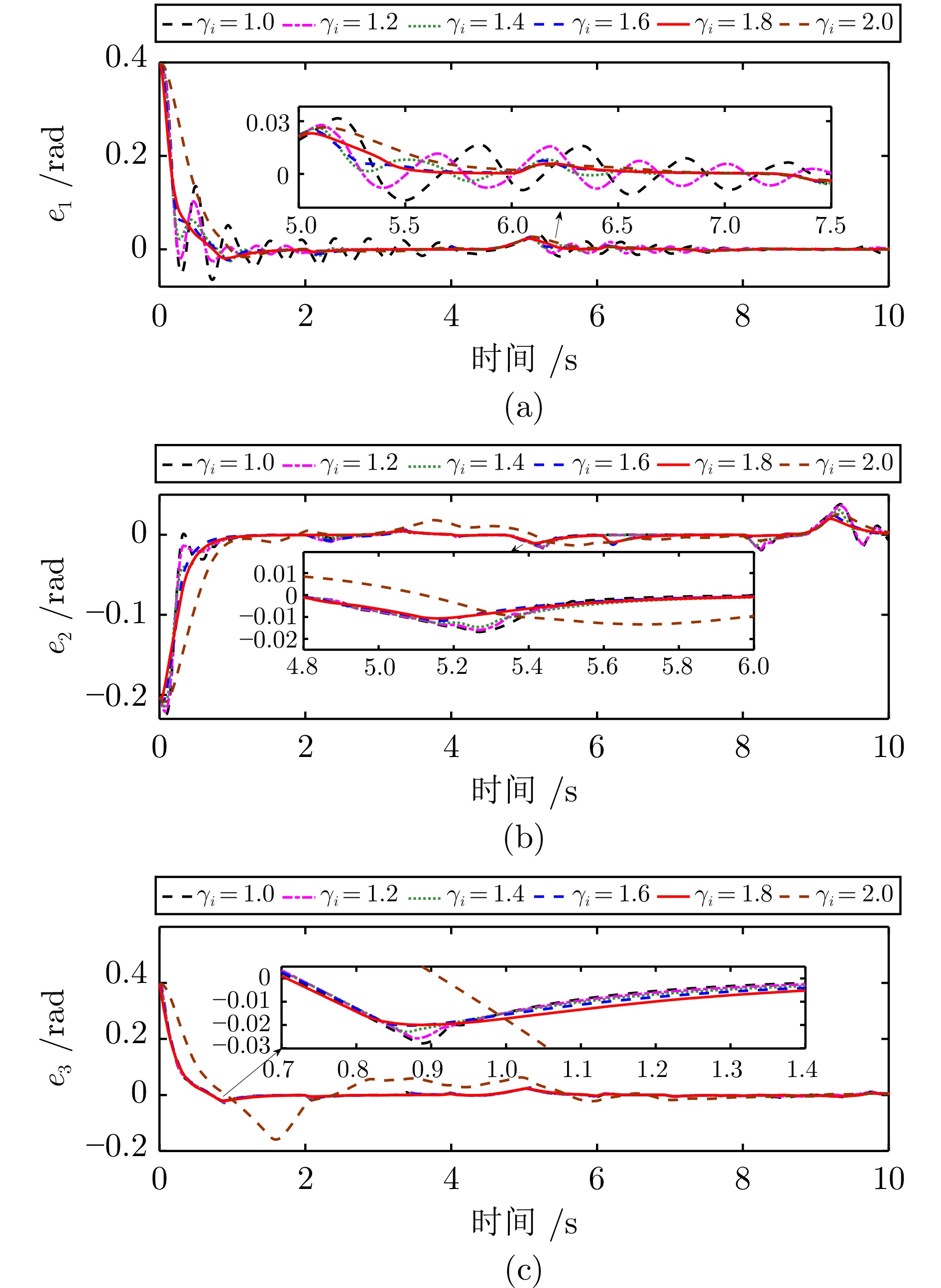
图 3 不同阶次下MIMO-MFFC方法在三个关节中的 跟踪误差结果((a)关节1误差; (b)关节2误差; (c)关节3误差)
Fig. 3 Tracking error results of the MIMO-MFFC method in three joints under different orders ((a) Error of joint 1; (b) Error of joint 2; (c) Error of joint 3)
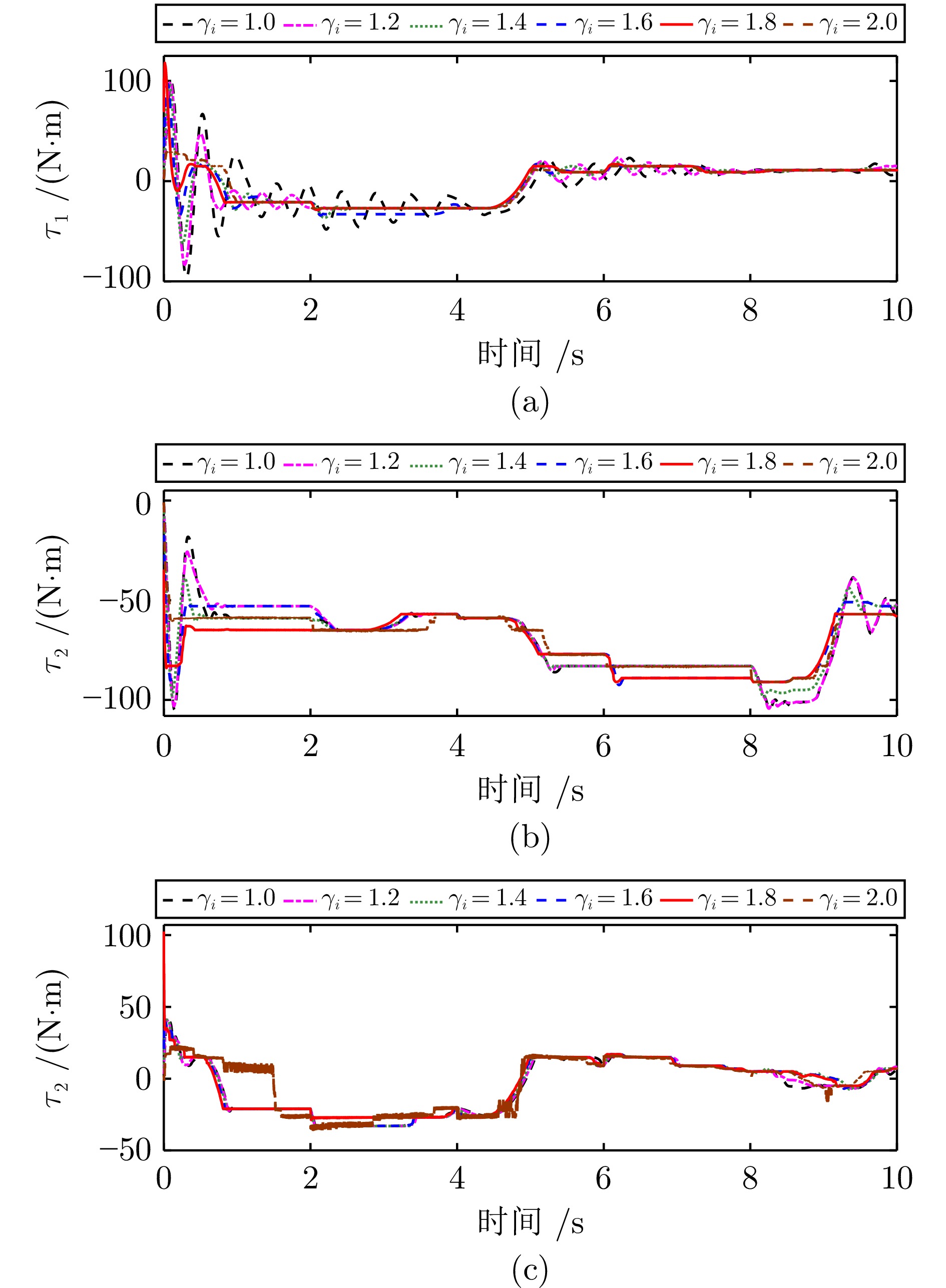
图 4 不同阶次下MIMO-MFFC方法在三个关节中的 控制力矩结果((a)关节1力矩; (b)关节2力矩; (c)关节3力矩)
Fig. 4 Control torque results of MIMO-MFFC method in three joints under different orders ((a) Torque of joint 1; (b) Torque of joint 2; (c) Torque of joint 3)
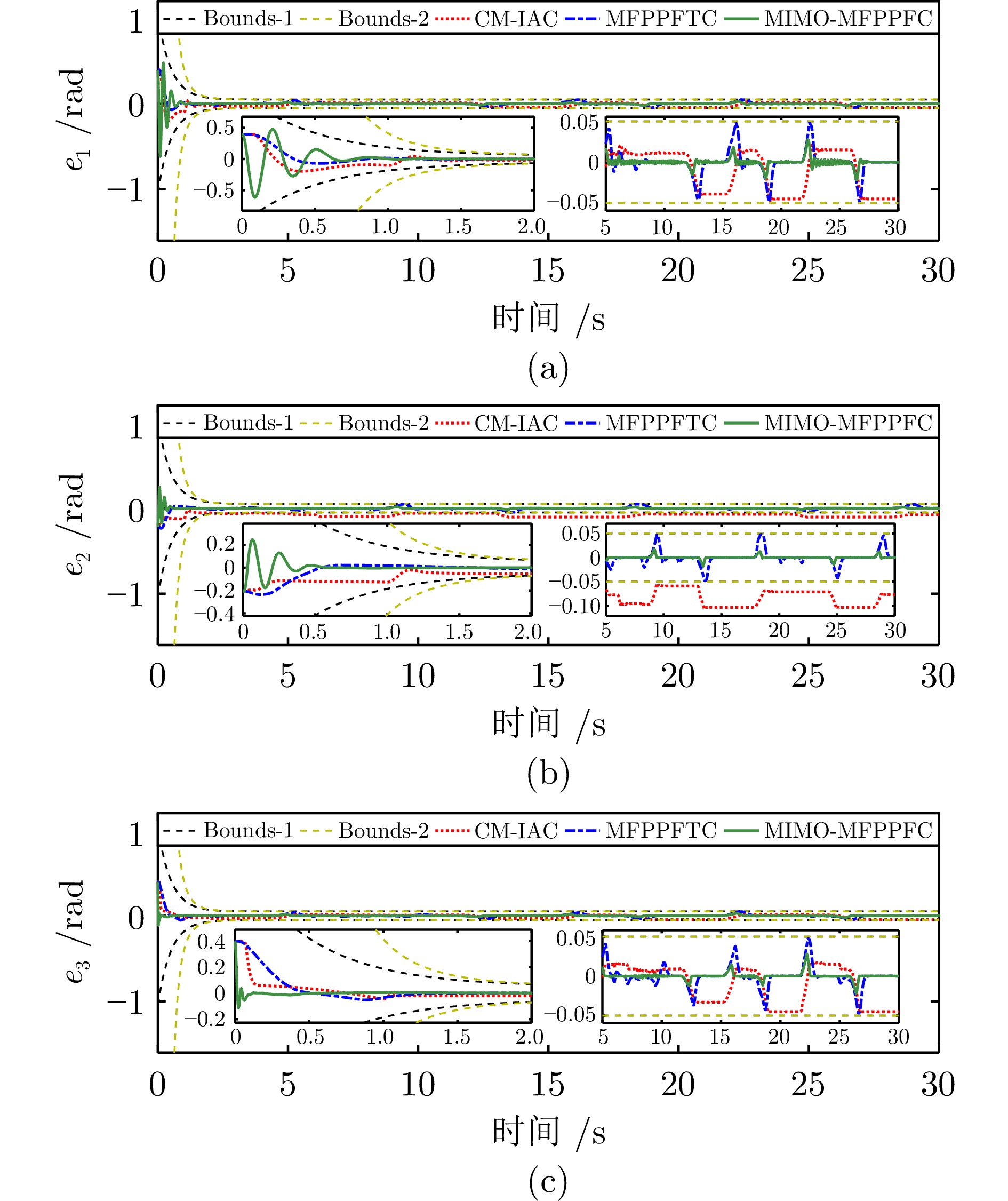
图 5 三个关节中CM-IAC、MFPPFTC和MIMO-MFPPFC方法的跟踪误差结果((a)关节1误差; (b)关节2误差; (c)关节3误差)
Fig. 5 Tracking error results of CM-IAC, MFPPFTC, and MIMO-MFPPFC methods in three joints ((a) Error of joint 1; (b) Error of joint 2; (c) Error of joint 3)
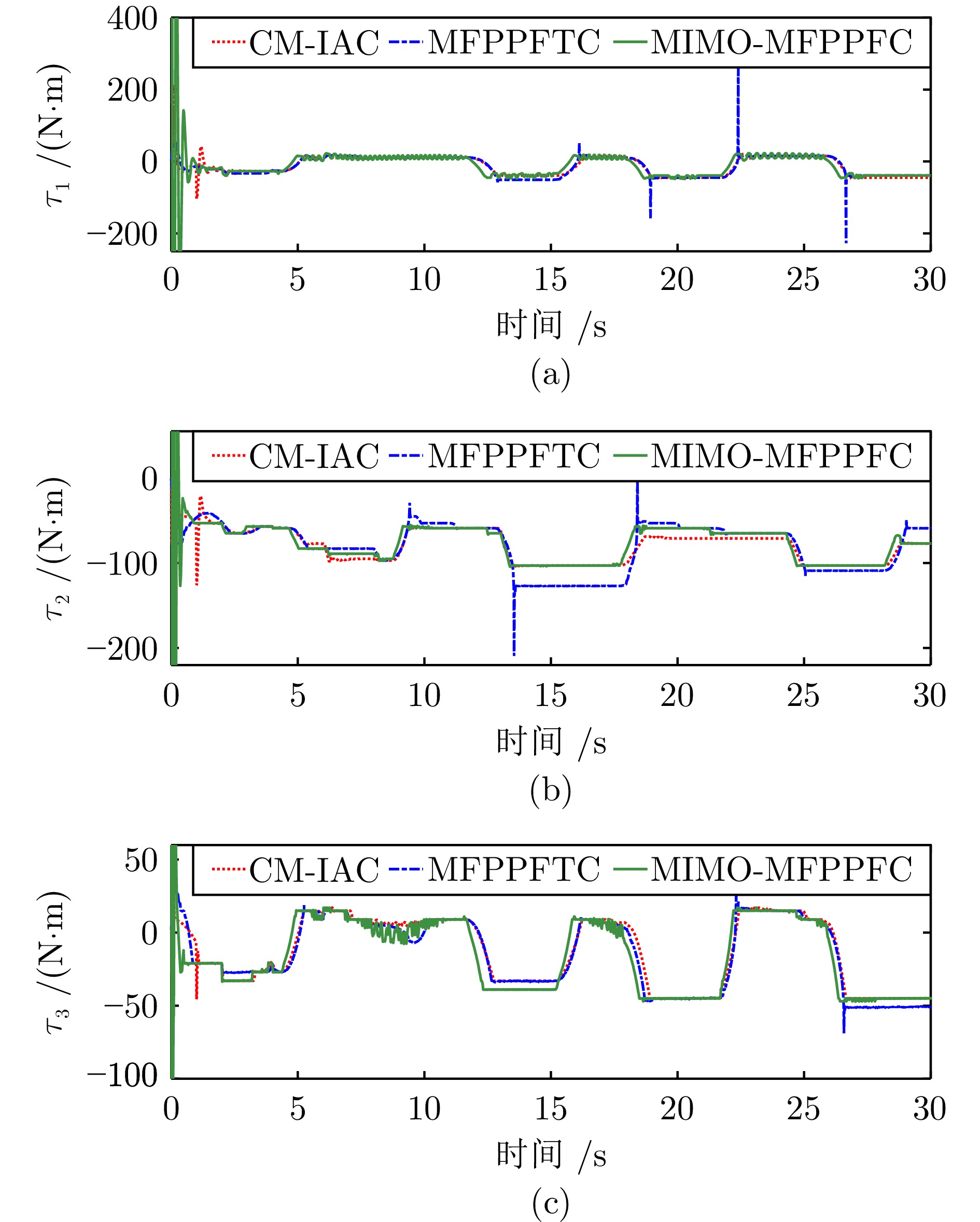
图 6 三个关节中CM-IAC、MFPPFTC和MIMO-MFPPFC方法的控制力矩结果((a)关节1力矩; (b)关节2力矩; (c)关节3力矩)
Fig. 6 Control torque results of CM-IAC, MFPPFTC, and MIMO-MFPPFC methods in three joints ((a) Torque of joint 1; (b) Torque of joint 2; (c) Torque of joint 3)
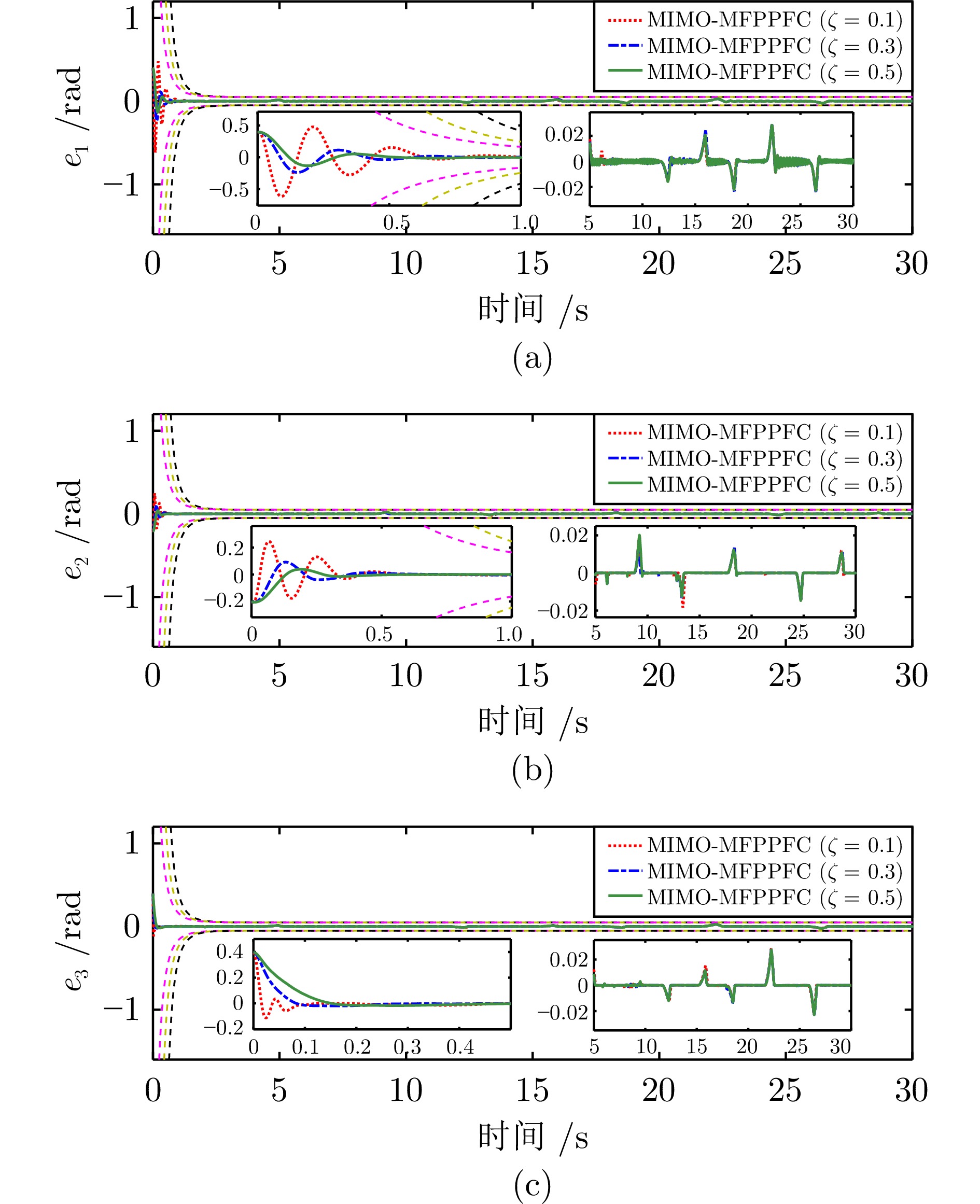
图 7 三个关节中不同$ \zeta $参数下MIMO-MFPPFC方法的跟踪误差结果((a)关节1误差; (b)关节2误差; (c)关节3误差)
Fig. 7 Tracking error results of MIMO-MFPPFC method under different $ \zeta $ in three joints ((a) Error of joint 1; (b) Error of joint 2; (c) Error of joint 3)
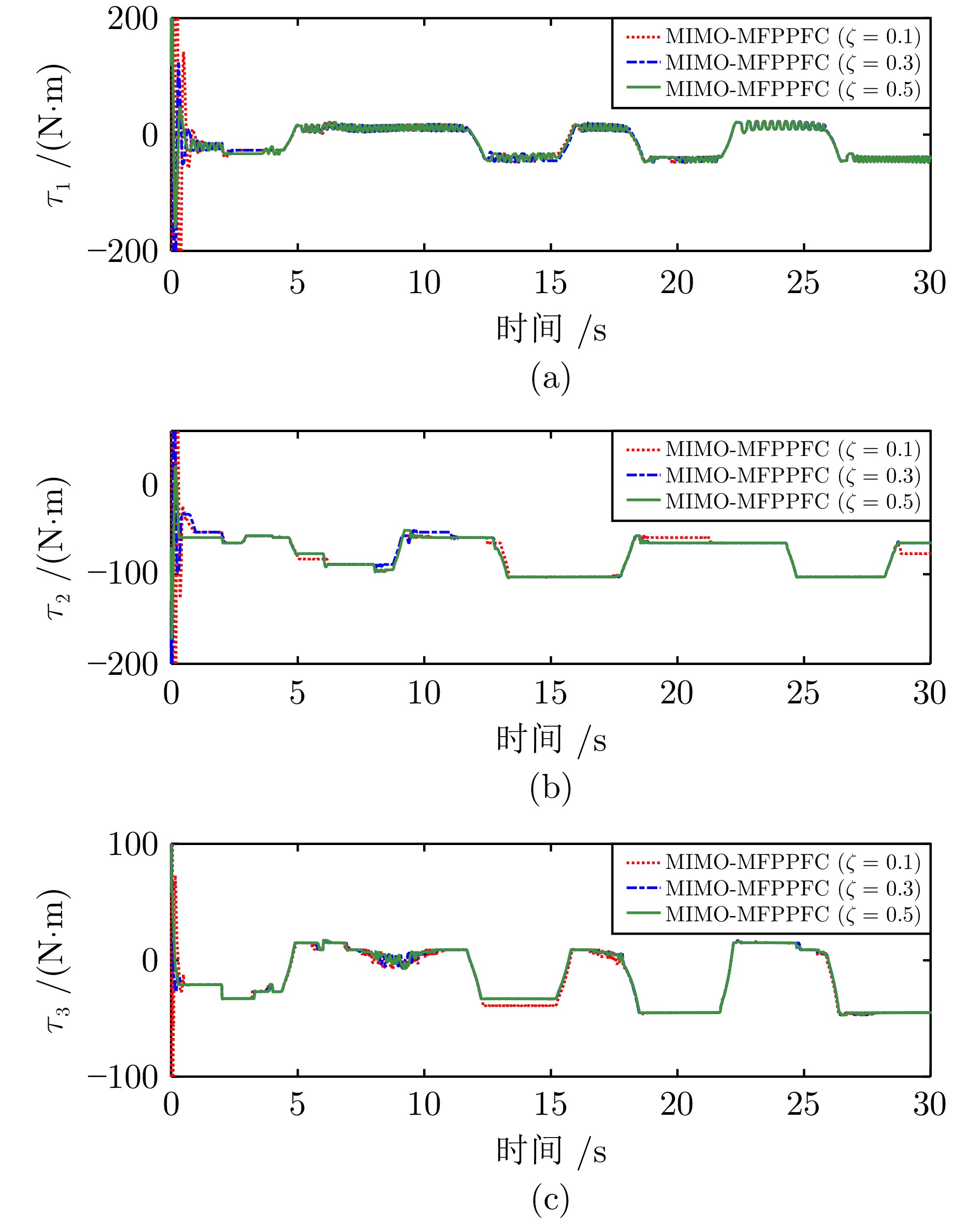
图 8 三个关节中不同$ \zeta $参数下MIMO-MFPPFC方法的控制力矩结果((a)关节1力矩; (b)关节2力矩; (c)关节3力矩)
Fig. 8 Control torque results of MIMO-MFPPFC method under different $ \zeta $ in three joints ((a) Torque of joint 1; (b) Torque of joint 2; (c) Torque of joint 3)
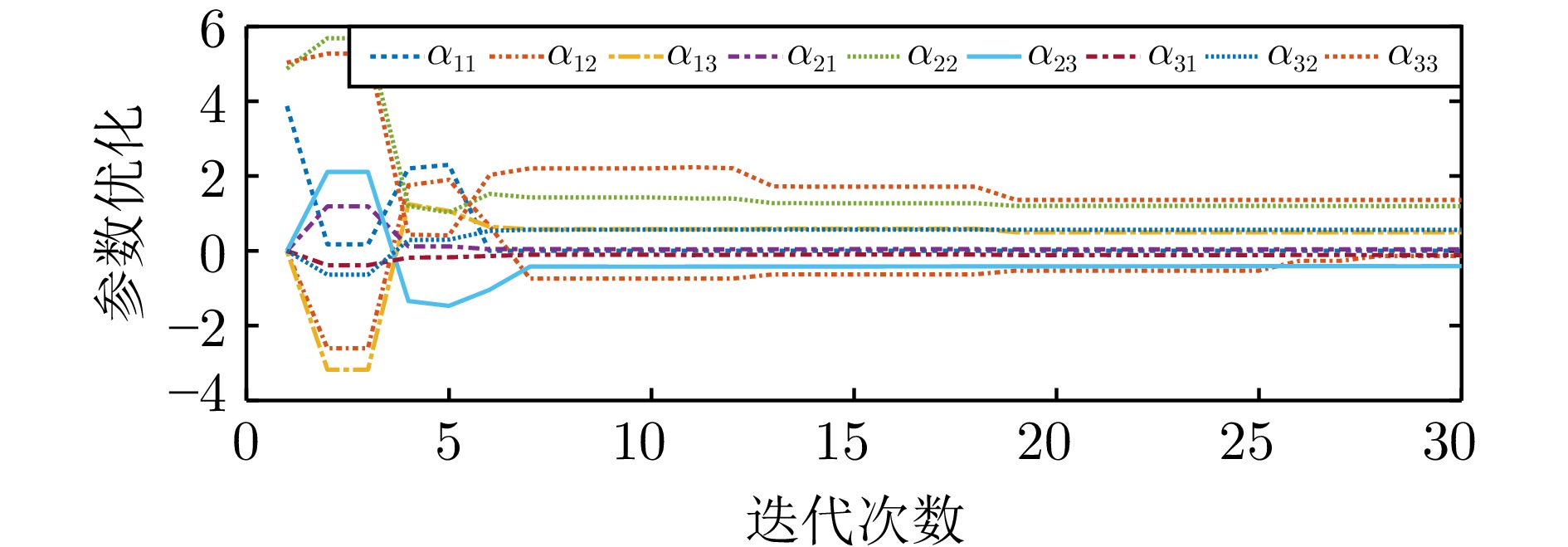
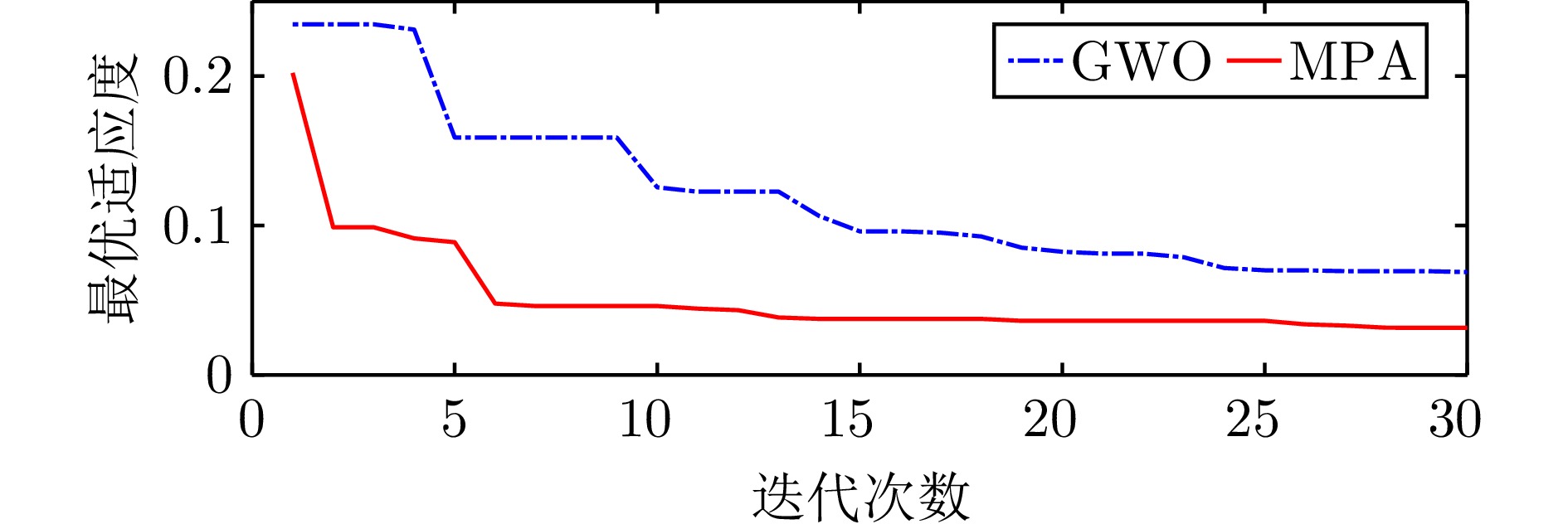
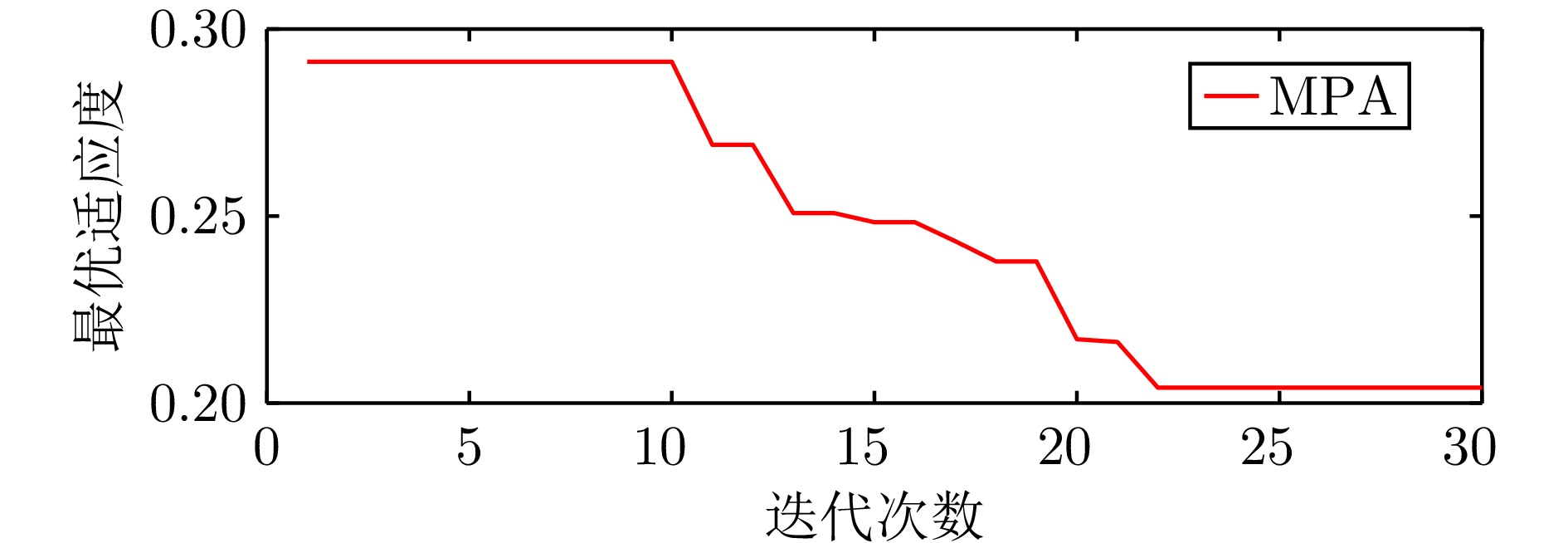
图 10 MPA算法下控制参数的优化结果
Fig. 10 Optimization results of control parameters under MPA algorithm
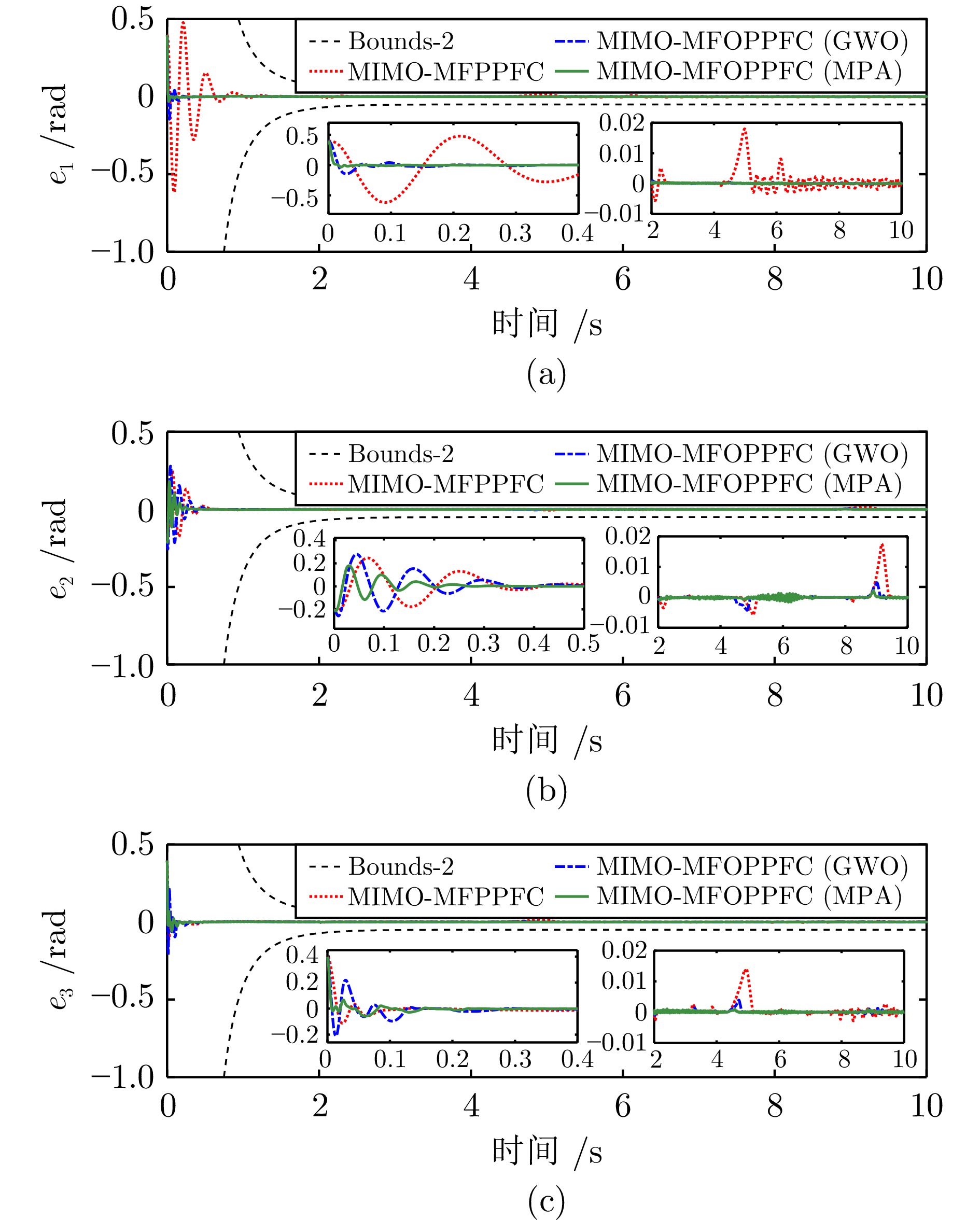
图 11 三个关节中MIMO-MFPPFC和基于不同优化 算法的MIMO-MFOPPFC跟踪误差结果((a)关节1 误差; (b)关节2误差; (c)关节3误差)
Fig. 11 Tracking error results of MIMO-MFPPFC and MIMO-MFOPPFC based on different optimization algorithms in three joints ((a) Error of joint 1; (b) Error of joint 2; (c) Error of joint 3)
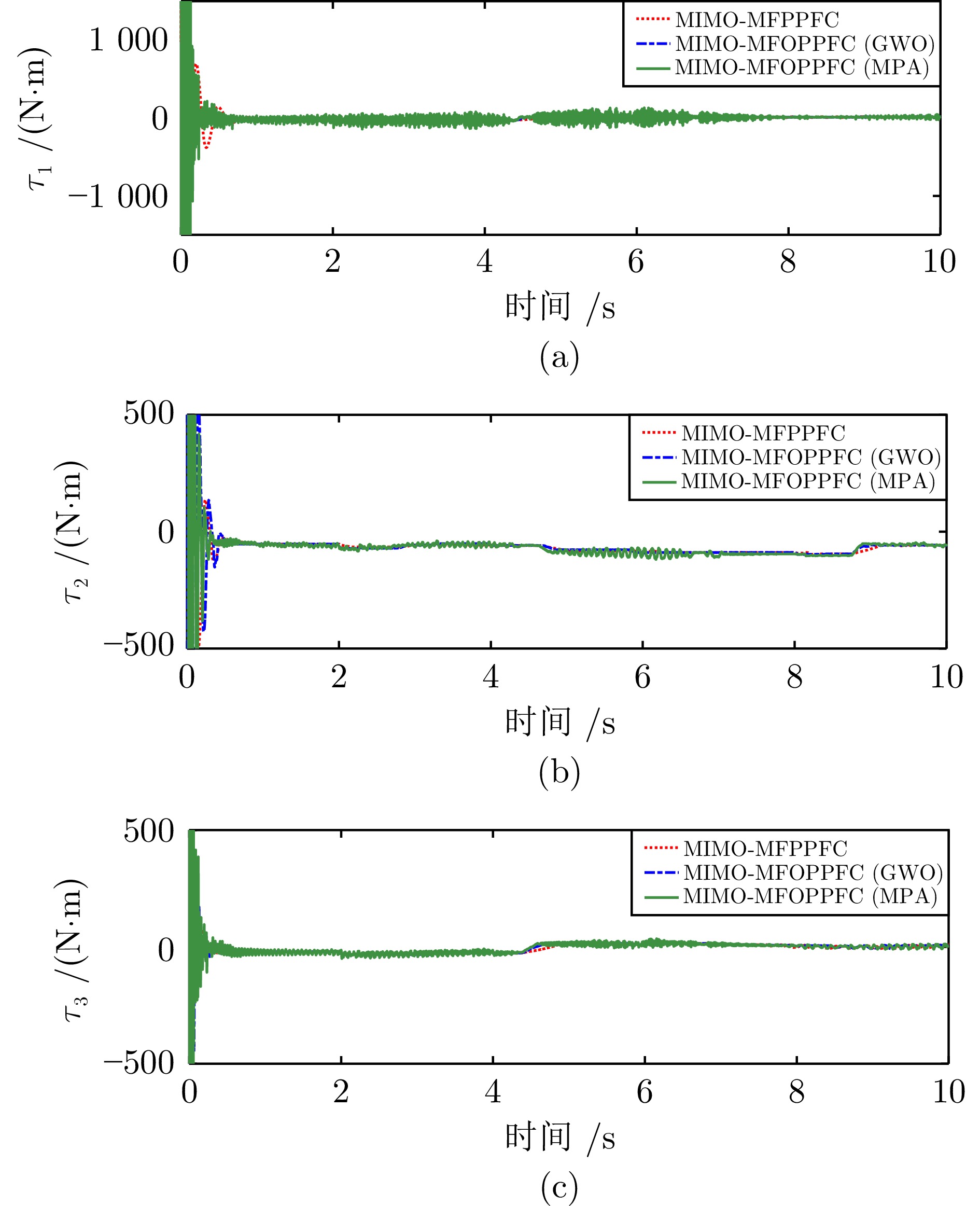
图 12 三个关节中MIMO-MFPPFC和基于不同优化 算法的MIMO-MFOPPFC控制力矩结果((a)关节1 力矩; (b)关节2力矩; (c)关节3力矩)
Fig. 12 Control torque results of MIMO-MFPPFC and MIMO-MFOPPFC based on different optimization algorithms in three joints ((a) Torque of joint 1; (b) Torque of joint 2; (c) Torque of joint 3)
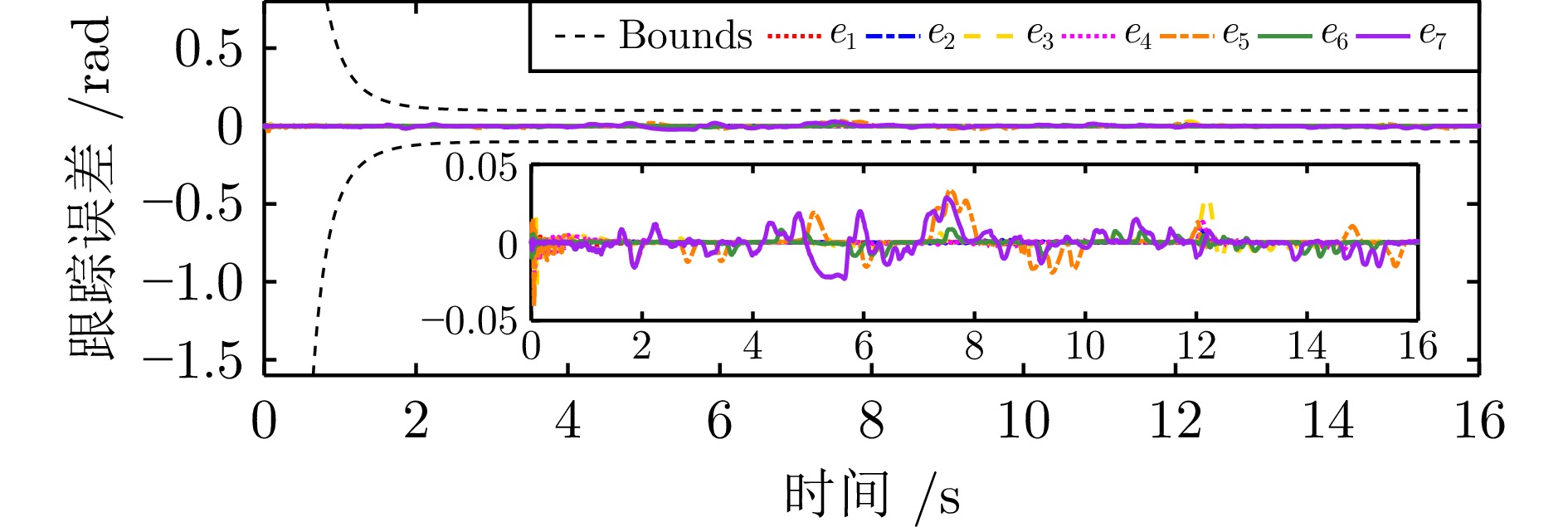
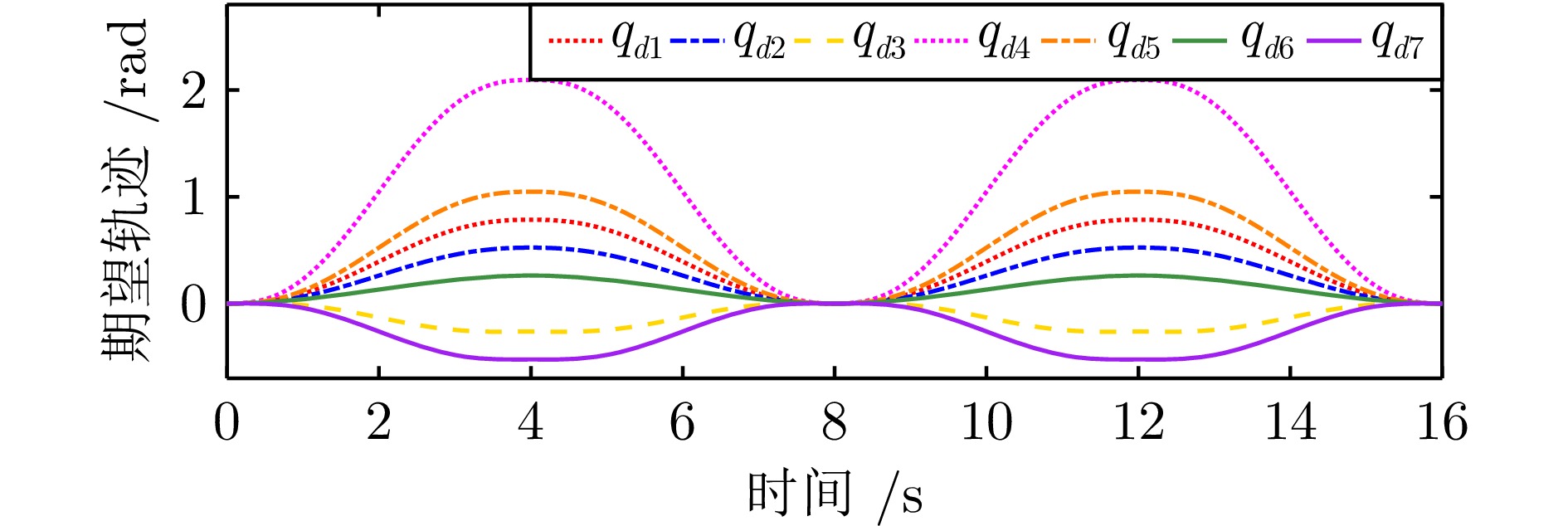
图 15 七个关节在MIMO-MFOPPFC方法下的跟踪误差结果
Fig. 15 Tracking error results of seven joints under MIMO-MFOPPFC method
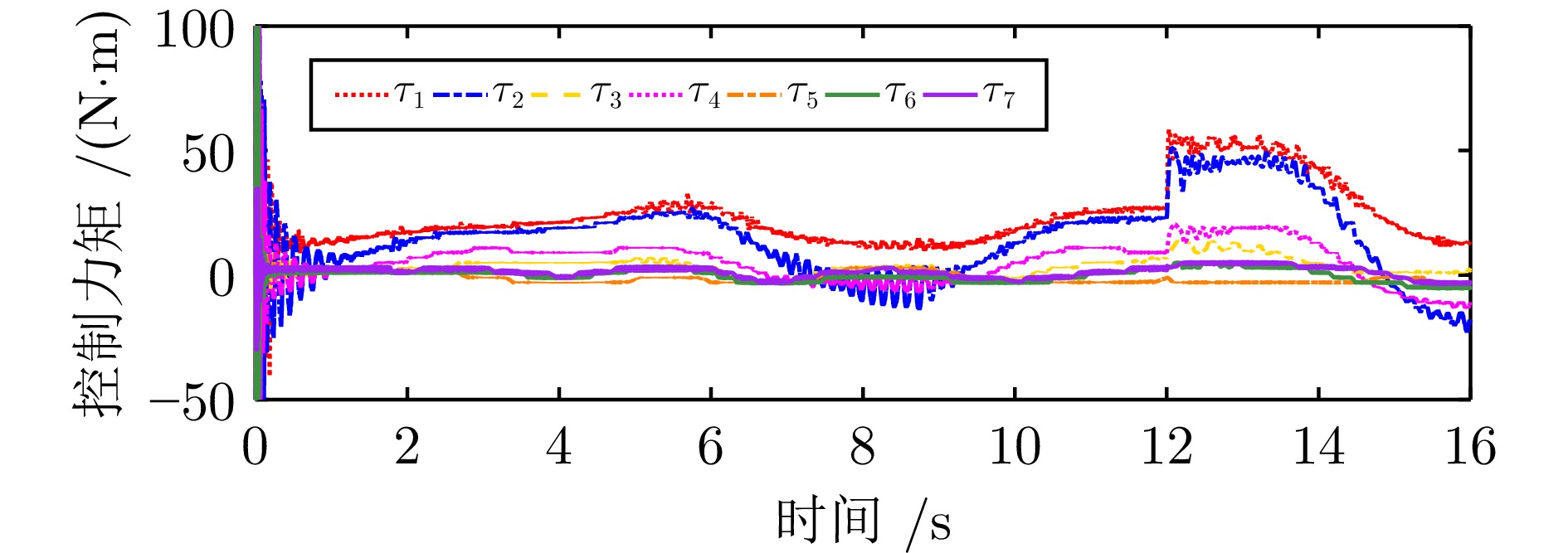
图 16 七个关节在MIMO-MFOPPFC方法下的控制力矩结果
Fig. 16 Control torque results of seven joints under MIMO-MFOPPFC method
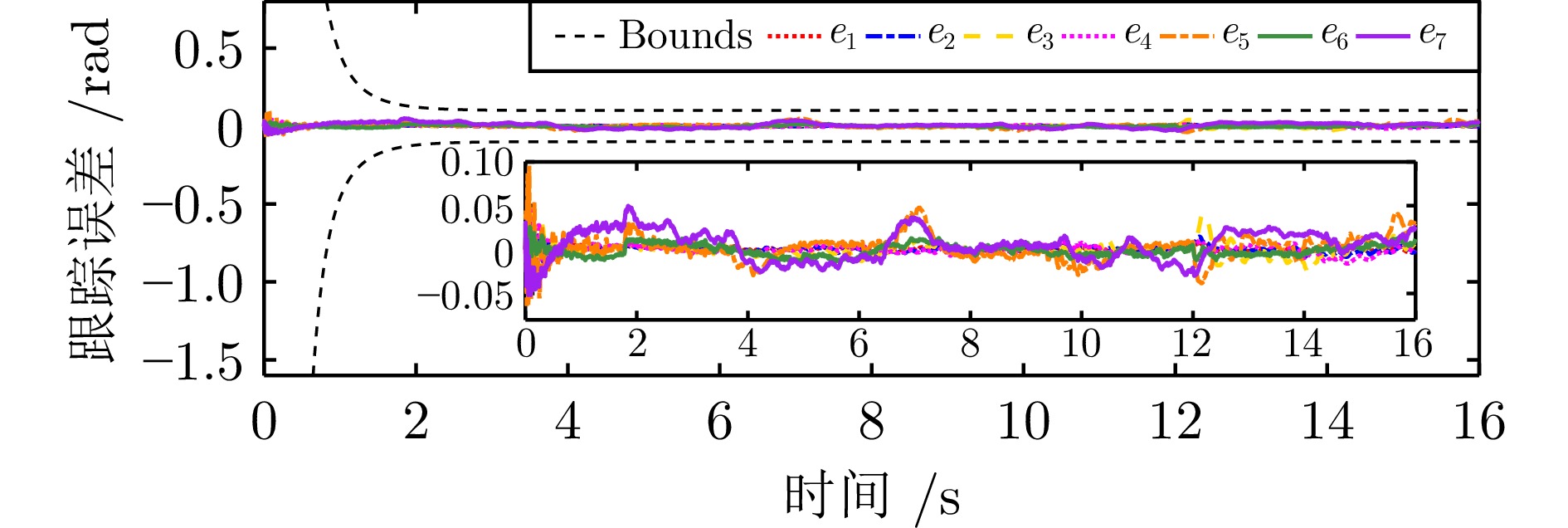
图 17 参数变化和测量噪声下MIMO-MFOPPFC方法的跟踪误差结果
Fig. 17 Tracking error results of MIMO-MFOPPFC method under parameter changes and measurement noise
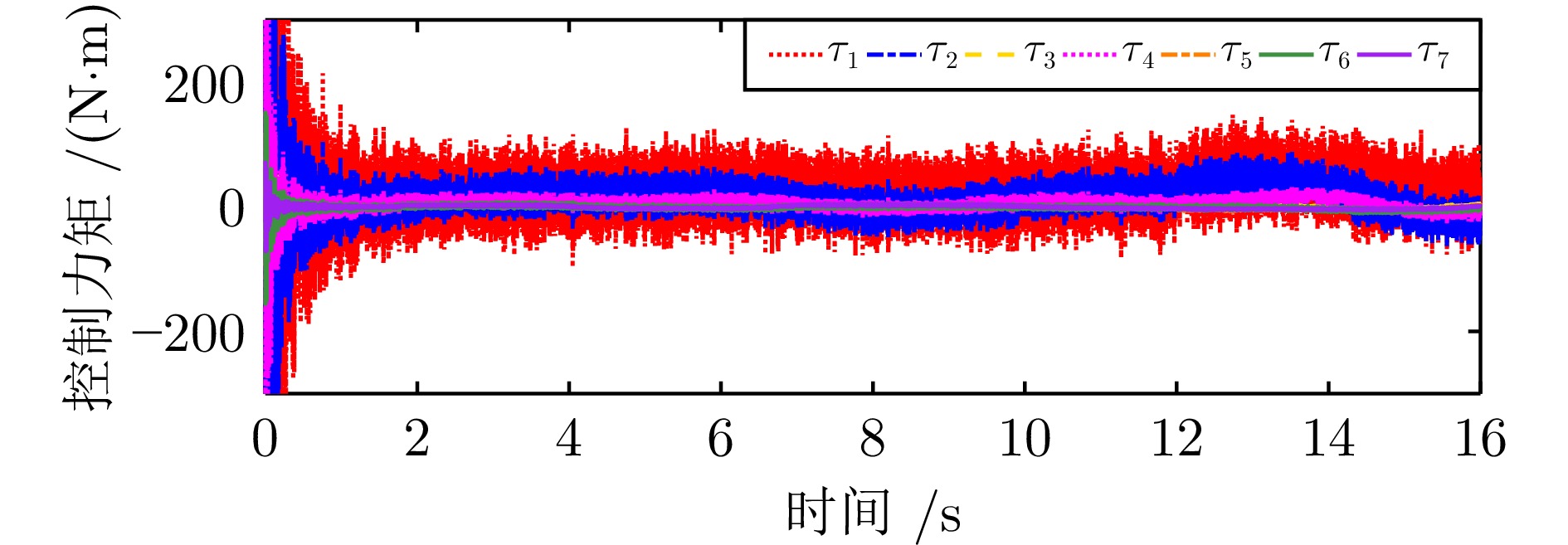
图 18 参数变化和测量噪声下MIMO-MFOPPFC方法的控制力矩结果
Fig. 18 Control torque results of MIMO-MFOPPFC method under parameter changes and measurement noise
表 1 符号定义表
Table 1 Symbol definition table
符号 含义 符号 含义 $ {{\boldsymbol{q}}} $、$ {{\boldsymbol{v}}} $、$ {{\boldsymbol{a}}} $ 机电系统位置、速度和加速度 $ {{\boldsymbol{c}}} $、$ \bar{{{\boldsymbol{k}}}} $ 滑模面参数和分数阶控制参数 $ l_1 $、$ l_2 $ 未知的时变延迟 $ \hat{{{\boldsymbol{F}}}} $、$ \hat{{\boldsymbol{{\cal{F}}}}} $ 时延估计值 $ {{\boldsymbol{\tau}}}_f $、$ {{\boldsymbol{\tau}}}_{w} $、$ {{\boldsymbol{\tau}}}_d $ 不确定性、非匹配扰动和匹配扰动 $ \backepsilon $、$ \bar{\backepsilon} $ 时延参数 $ {{\boldsymbol{\tau}}} $、$ IN({{\boldsymbol{\tau}}}) $ 控制力矩和实际执行器输出 $ {{\boldsymbol{\mho}}} $、$ \boldsymbol{{{\bar{\mho}}}} $ 低通滤波器参数 $ n $、$ t $ 自由度数量和时间 $ {{\boldsymbol{\tau}}}_p $ 预设性能有限时间控制律 $ u_{\text{min}} $、$ \rho $ 量化死区和量化密度 $ {\cal{A}}_i $、$ {\cal{B}}_i $ 上下界性能函数 $ m_r $、$ m_l $ 死区斜率 $ \varpi_i $ 变换后误差 $ b_r $、$ b_l $ 死区长度 $ k_{bi} $ 影响约束边界的参数 $ \bar\rho $、$ {\cal{E}} $ 乘型和加型故障 $ \kappa_i $、$ \delta_i $、$ \eta_i $、$ p $ 预设性能控制律参数 $ T $、$ \varrho_\infty $ 性能函数的收敛时间和稳态精度 $ \wp $ 影响符号函数逼近的参数 $ \zeta $ 影响性能函数初值的参数 $ {{\boldsymbol{X}}}_j $、$ {{\boldsymbol{P}}} $、$ {{\boldsymbol{E}}} $ 猎物、猎物矩阵和精英矩阵 $ h $ 影响性能函数动态的参数 $ {{\boldsymbol{X}}}_{\text{max}} $、$ {{\boldsymbol{X}}}_{\text{min}} $ 猎物的上下界 $ \gamma_i $、$ {{\boldsymbol{F}}} $ 极局部分数阶次和集成扰动 $ J $、$ T_f $ 适应度函数和运行总时间 $ {{\boldsymbol{\alpha}}} $、$ \alpha_{ij} $ 控制输入增益矩阵及其元素 $ N $、$ Max\_Iter $ 种群数量和迭代次数 $ {{\boldsymbol{e}}} $、$ {{\boldsymbol{z}}} $ 跟踪误差和类滑模变量 $ P $ 个体移动步长 $ {{\boldsymbol{\tau}}}_s $ 分数阶滑模控制律 $ f_F $ 鱼群聚集效应触发概率  下载: 导出CSV
下载: 导出CSV
表 2 不同阶次下MIMO-MFFC方法的IAE性能指标
Table 2 IAE performance indices of the MIMO-MFFC method under different orders
关节 $ \gamma_i=1.0 $ $ \gamma_i=1.2 $ $ \gamma_i=1.4 $ $ \gamma_i=1.6 $ $ \gamma_i=1.8 $ $ \gamma_i=2.0 $ 1 0.182 1 0.117 7 0.106 8 0.110 0 0.105 2 0.199 2 2 0.092 0 0.092 0 0.087 9 0.086 3 0.085 0 0.164 5 3 0.117 0 0.117 7 0.117 2 0.117 3 0.112 7 0.423 9
下载: 导出CSV
表 3 CM-IAC、MFPPFTC和MIMO-MFPPFC方法的IAE性能指标
Table 3 IAE performance indices of CM-IAC, MFPPFTC, and MIMO-MFPPFC methods
关节 CM-IAC MFPPFTC MIMO-MFPPFC 1 0.863 8 0.309 6 0.216 6 2 2.468 0 0.280 4 0.069 4 3 0.726 3 0.295 3 0.056 0
下载: 导出CSV
表 4 MIMO-MFPPFC和基于不同优化算法的 MIMO-MFOPPFC的IAE性能指标
Table 4 IAE performance indices of MIMO-MFPPFC and MIMO-MFOPPFC based on different optimization algorithms
关节 MIMO-MFPPFC MIMO-MFOPPFC GWO MPA 1 0.163 1 0.013 4 0.006 2 2 0.050 4 0.038 7 0.017 2 3 0.021 2 0.016 8 0.008 1
下载: 导出CSV
-
[1] Hjorth S, Chrysostomou D. Human-robot collaboration in industrial environments: A literature review on non-destructive disassembly. Robotics and Computer-Integrated Manufacturing, 2022, 73: Article No. 102208 doi: 10.1016/j.rcim.2021.102208 [2] 张振, 郭一楠, 巩敦卫, 朱松, 田滨. 基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制. 自动化学报, 2023, 49(6): 1256−1271Zhang Zhen, Guo Yi-Nan, Gong Dun-Wei, Zhu Song, Tian Bin. Sliding mode swing angle control for a hydraulic roofbolter based on improved extended state observer. Acta Automatica Sinica, 2023, 49(6): 1256−1271 [3] Zhu Y P, Zhu W Y, Liu J P, Wang Q G, Yu J P. Command-filtered finite-time fuzzy adaptive fault-tolerant control of output-constrainted robotic manipulators with unknown dead-zones. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 2023, 70(8): 2939−2943 doi: 10.1109/TCSII.2023.3249188 [4] Ibrir S, Su C Y. Simultaneous state and dead-zone parameter estimation for a class of bounded-state nonlinear systems. IEEE Transactions on Control Systems Technology, 2011, 19(4): 911−919 doi: 10.1109/TCST.2010.2054093 [5] Deng W X, Yao J Y, Ma D W. Robust adaptive precision motion control of hydraulic actuators with valve dead-zone compensation. ISA Transactions, 2017, 70: 269−278 doi: 10.1016/j.isatra.2017.07.022 [6] Zhang Y, Kong L H, Zhang S, Yu X B, Liu Y. Improved sliding mode control for a robotic manipulator with input deadzone and deferred constraint. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023, 53(12): 7814−7826 doi: 10.1109/TSMC.2023.3301662 [7] Zhang H. Adaptive fuzzy controller design for uncertain robotic manipulators subject to nonlinear dead zone inputs. Computational Intelligence and Neuroscience, 2022(1): Article No. 9173249 doi: 10.1155/2022/9173249 [8] 赵扬, 刘霞. 机器人系统的加权快速终端滑模主动容错控制. 信息与控制, 2023, 52(3): 360−368 doi: 10.13976/j.cnki.xk.2023.2193Zhao Yang, Liu Xia. Weighted fast terminal sliding mode active fault-tolerant control for robotic system. Information and Control, 2023, 52(3): 360−368 doi: 10.13976/j.cnki.xk.2023.2193 [9] Fazeli S M, Abedi M, Molaei A, Hassani M, Khosravi M A, Ameri A. Active fault-tolerant control of cable-driven parallel robots. Nonlinear Dynamics, 2023, 111(7): 6335−6347 doi: 10.1007/s11071-022-08184-x [10] Pan T T, Chang X H, Liu Y. Robust fuzzy feedback control for nonlinear systems with input quantization. IEEE Transactions on Fuzzy Systems, 2022, 30(11): 4905−4914 doi: 10.1109/TFUZZ.2022.3163908 [11] Jiang T, Yan Y, Yu S H, Li T S, Sang H. Event-triggered based predefined-time tracking control for robotic manipulators with state and input quantization. Nonlinear Dynamics, 2024, 112(21): 19169−19183 doi: 10.1007/s11071-024-10037-8 [12] 陈强, 曹雅倩, 吴春. 基于变速趋近律的机电伺服系统自适应滑模控制. 控制与决策, 2022, 37(4): 1067−1073 doi: 10.13195/j.kzyjc.2020.1166Chen Qiang, Cao Ya-Qian, Wu Chun. Adaptive sliding mode control of electromechanical servo system based on variable rate reaching law. Control and Decision, 2022, 37(4): 1067−1073 doi: 10.13195/j.kzyjc.2020.1166 [13] 李晨萍, 张雪波, 王润花, 李宝全, 方勇纯. 基于视觉SLAM-伺服框架的移动机器人指令滤波反步控制. 控制理论与应用, 2022, 39(12): 2233−2241 doi: 10.7641/CTA.2022.11260Li Chen-Ping, Zhang Xue-Bo, Wang Run-Hua, Li Bao-Quan, Fang Yong-Chun. Command filter backstepping control for mobile robots based on visual SLAM and servoing framework. Control Theory & Applications, 2022, 39(12): 2233−2241 doi: 10.7641/CTA.2022.11260 [14] Chen J X, Lyu L T, Fei Z Y, Xia W G, Sun X M. Event-triggered adaptive robust control for a class of uncertain nonlinear systems with application to mechatronic system. IEEE Transactions on Industrial Informatics, 2023, 19(12): 11800−11808 doi: 10.1109/TII.2023.3252543 [15] 陈浩敏, 姚森敬, 席禹, 张凡, 辛文成, 任超. 基于数据驱动的变电站巡检机器人自抗扰控制. 信息与控制, 2021, 50(4): 385−394Chen Hao-Min, Yao Sen-Jing, Xi Yu, Zhang Fan, Xin Wen-Cheng, Ren Chao. Data-driven based active disturbance rejection control for substation inspection robot. Information and Control, 2021, 50(4): 385−394 [16] 王晓峰, 李醒, 王建辉. 基于无模型自适应的外骨骼式上肢康复机器人主动交互训练控制方法. 自动化学报, 2016, 42(12): 1899−1914 doi: 10.16383/j.aas.2016.c160057Wang Xiao-Feng, Li Xing, Wang Jian-Hui. Active interaction exercise control of exoskeleton upper limb rehabilitation robot using model-free adaptive methods. Acta Automatica Sinica, 2016, 42(12): 1899−1914 doi: 10.16383/j.aas.2016.c160057 [17] Baek S M, Baek J C, Kwon W Y, Han S H. An adaptive model uncertainty estimator using delayed state-based model-free control and its application to robot manipulators. IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 4573−4584 doi: 10.1109/TMECH.2022.3160495 [18] Wu H X, Hu J, Xie Y C. Characteristic model-based all-coefficient adaptive control method and its applications. IEEE Transactions on Systems, Man, and Cybernetics, Part C, 2007, 37(2): 213−221 doi: 10.1109/TSMCC.2006.887004 [19] Fliess M, Join C. Model-free control. International Journal of Control, 2013, 86(12): 2228−2252 doi: 10.1080/00207179.2013.810345 [20] Wang H P, Tian Y, Ni S Y, Christov N. Intelligent proportional trajectory tracking controllers: Using ultra-local model and time delay estimation techniques. In: Proceedings of 27th Chinese Control and Decision Conference. Qingdao, China: IEEE, 2015. 430−435 [21] Sun J J, Wang J, Yang P, Guo S J. Model-free prescribed performance fixed-time control for wearable exoskeletons. Applied Mathematical Modelling, 2021, 90: 61−77 doi: 10.1016/j.apm.2020.09.010 [22] He D X, Wang H P, Tian Y, Fliess M. MIMO ultra-local model-based adaptive enhanced model-free control using extremum-seeking for coupled mechatronic systems. ISA Transactions, 2025, 157: 233−247 doi: 10.1016/j.isatra.2024.11.050 [23] Lv J X, Ju X Z, Wang C H. Neural network prescribed-time observer-based output-feedback control for uncertain pure-feedback nonlinear systems. Expert Systems With Applications, 2025, 264: Article No. 125813 doi: 10.1016/j.eswa.2024.125813 [24] Li H, Hua C C, Li K. Secure state constraints control design for uncertain nonlinear systems via a unified boundary modification approach. Automatica, 2025, 171: Article No. 111964 doi: 10.1016/j.automatica.2024.111964 [25] Ding B, Xu D Z, Jiang B, Shi P, Yang W L. Disturbance-observer-based terminal sliding mode control for linear traction system with prescribed performance. IEEE Transactions on Transportation Electrification, 2021, 7(2): 649−658 doi: 10.1109/TTE.2020.3027367 [26] 吴青聪, 张祖国. 基于屏障Lyapunov函数的上肢康复机器人自适应主动交互训练控制. 仪器仪表学报, 2022, 43(2): 216−224 doi: 10.19650/j.cnki.cjsi.J2108337Wu Qing-Cong, Zhang Zu-Guo. Adaptive active interaction exercise control of upper limb rehabilitation robot based on the barrier Lyapunov function. Chinese Journal of Scientific Instrument, 2022, 43(2): 216−224 doi: 10.19650/j.cnki.cjsi.J2108337 [27] He D X, Wang H P, Tian Y, Ma X Y. Model-free finite-time robust control using fractional-order ultra-local model and prescribed performance sliding surface for upper-limb rehabilitation exoskeleton. ISA Transactions, 2024, 147: 511−526 doi: 10.1016/j.isatra.2024.02.002 [28] Zhang X L, Zhang Y, Hu Q, Han Z Y. Adaptive fixed-time prescribed performance control for the upper limb exoskeleton with arbitrary initial errors. Journal of the Franklin Institute, 2026, 363(5): Article No. 108459 doi: 10.1016/j.jfranklin.2026.108459 [29] Xu T, Wen G H, Duan Z S, Xie L H. Prescribed performance distributed event-triggered control. Automatica, 2025, 182: Article No. 112551 doi: 10.1016/j.automatica.2025.112551 [30] Chen Y J, Liang J C, Wu Y N, Miao Z Q, Zhang H, Wang Y N. Adaptive sliding-mode disturbance observer-based finite-time control for unmanned aerial manipulator with prescribed performance. IEEE Transactions on Cybernetics, 2023, 53(5): 3263−3276 doi: 10.1109/TCYB.2022.3168030 [31] Yang P, Su Y X. Proximate fixed-time prescribed performance tracking control of uncertain robot manipulators. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3275−3285 doi: 10.1109/TMECH.2021.3107150 [32] Gao S H, Liu X P, Jing Y W, Dimirovski G M. Finite-time prescribed performance control for spacecraft attitude tracking. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3087−3098 doi: 10.1109/TMECH.2021.3108558 [33] 赵康, 李小凡, 薛建儒. 基于随机森林学习残差的重载卡车模型预测控制器设计. 自动化学报, 2025, 51(11): 2427−2440 doi: 10.16383/j.aas.c250207Zhao Kang, Li Xiao-Fan, Xue Jian-Ru. Model predictive controller design for heavy-duty trucks based on random forest residual learning. Acta Automatica Sinica, 2025, 51(11): 2427−2440 doi: 10.16383/j.aas.c250207 [34] Song G I, Park H Y, Kim J H. The H∞ robust stability and performance conditions for uncertain robot manipulators. IEEE/CAA Journal of Automatica Sinica, 2025, 12(1): 270−272 doi: 10.1109/JAS.2024.124701 [35] 辛斌, 陈杰, 彭志红. 智能优化控制: 概述与展望. 自动化学报, 2013, 39(11): 1831−1848 doi: 10.16383/j.aas.c220819Xin Bin, Chen Jie, Peng Zhi-Hong. Intelligent optimized control: Overview and prospect. Acta Automatica Sinica, 2013, 39(11): 1831−1848 doi: 10.16383/j.aas.c220819 [36] Xie Y B, Wang D, Qiao J F. Dynamic multi-objective intelligent optimal control toward wastewater treatment processes. Science China Technological Sciences, 2022, 65: 569−580 doi: 10.1007/s11431-021-1960-7 [37] Zamfirache I A, Precup R E, Roman R C, Petriu E M. Policy iteration reinforcement learning-based control using a grey wolf optimizer algorithm. Information Sciences, 2022, 585: 162−175 doi: 10.1016/j.ins.2021.11.051 [38] He D X, Wang H P, Tian Y, Guo Y D. A fractional-order ultra-local model-based adaptive neural network sliding mode control of n-DOF upper-limb exoskeleton with input deadzone. IEEE/CAA Journal of Automatica Sinica, 2024, 11(3): 760−781 doi: 10.1109/JAS.2023.123882 [39] Jia F J, Yan X, Wang X H, Lu J W, Li Y M. Robust adaptive prescribed performance dynamic surface control for uncertain nonlinear pure-feedback systems. Journal of the Franklin Institute, 2020, 357(5): 2752−2772 doi: 10.1016/j.jfranklin.2019.12.006 [40] Cao Y, Cao J F, Song Y D. Practical prescribed time tracking control over infinite time interval involving mismatched uncertainties and non-vanishing disturbances. Automatica, 2022, 136: Article No. 110050 doi: 10.1016/j.automatica.2021.110050 [41] Faramarzi A, Heidarinejad M, Mirjalili S, Gandomi A H. Marine predators algorithm: A nature-inspired metaheuristic. Expert Systems With Applications, 2020, 152: Article No. 113377 doi: 10.1016/j.eswa.2020.113377 [42] Ahmed S, Wang H P, Tian Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(2): 1128−1137 doi: 10.1109/TSMC.2019.2895588 [43] Mirjalili S, Mirjalili S M, Lewis A. Grey wolf optimizer. Advances in Engineering Software, 2014, 69: 46−61 doi: 10.1016/j.advengsoft.2013.12.007 -

 下载:
下载:

计量
- 文章访问数: 115
- HTML全文浏览量: 109
- 被引次数: 0
