

Hypersonic Morphing Vehicle Adaptive Active Disturbance Rejection and Anti-saturation Optimal Control
-
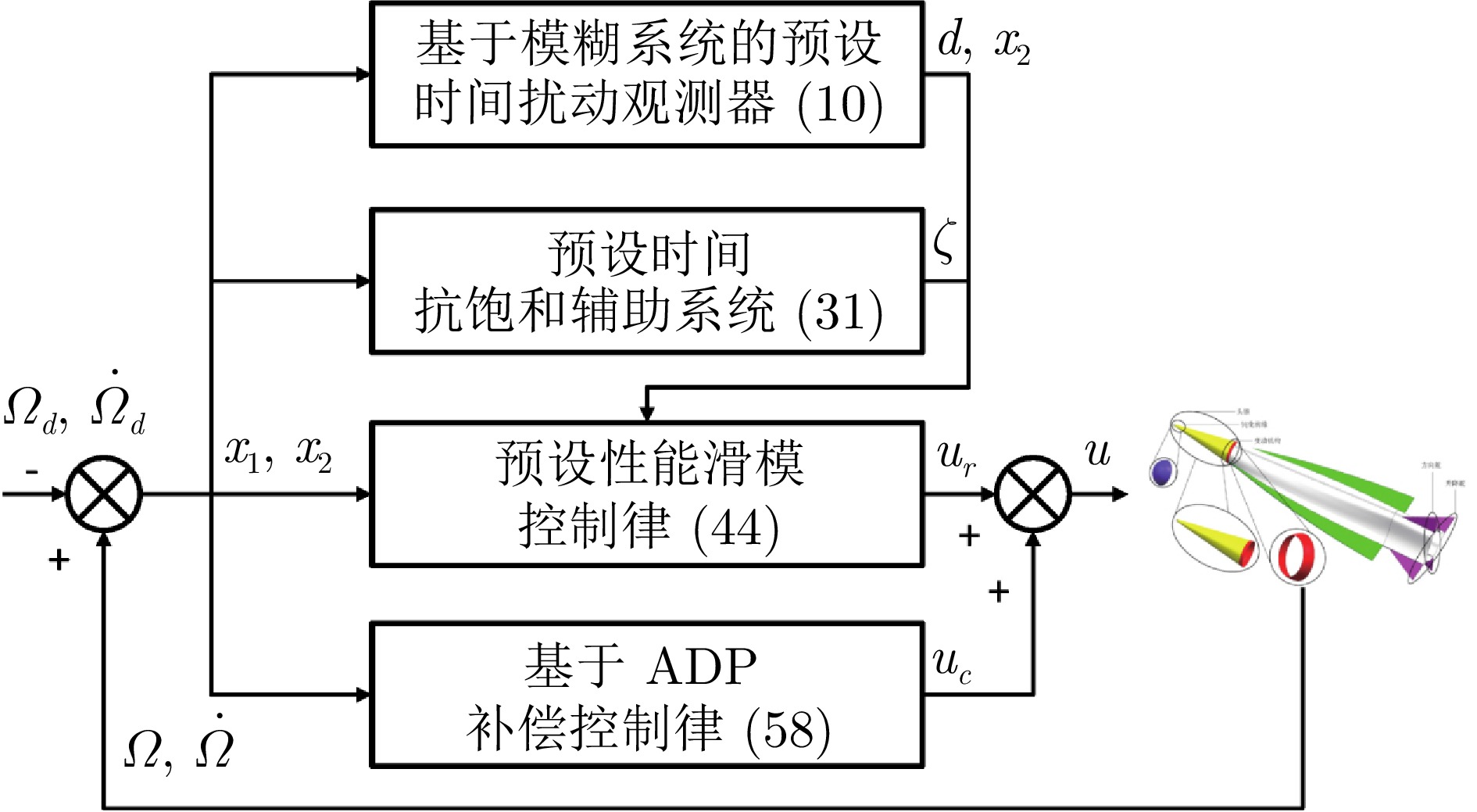
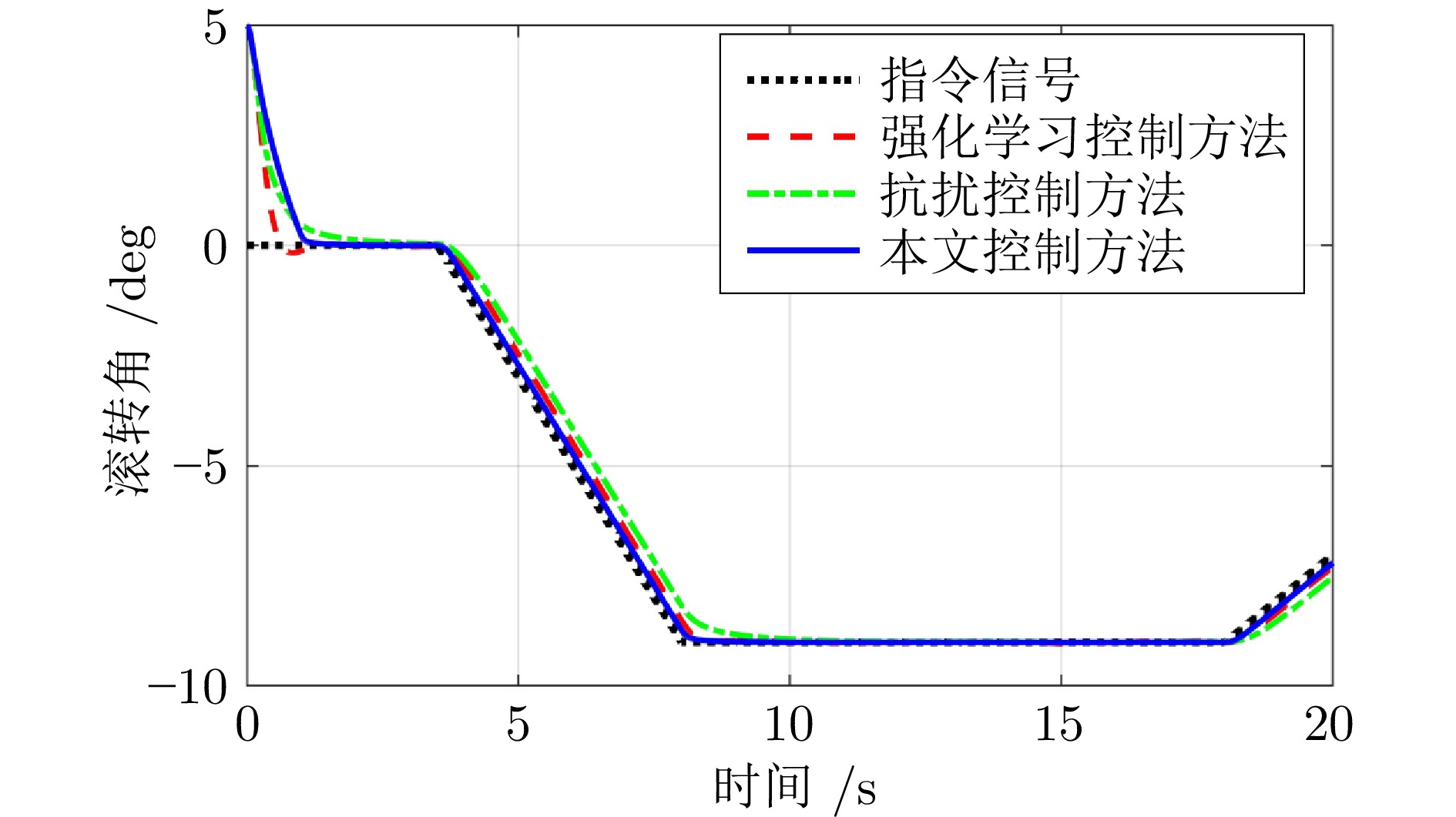
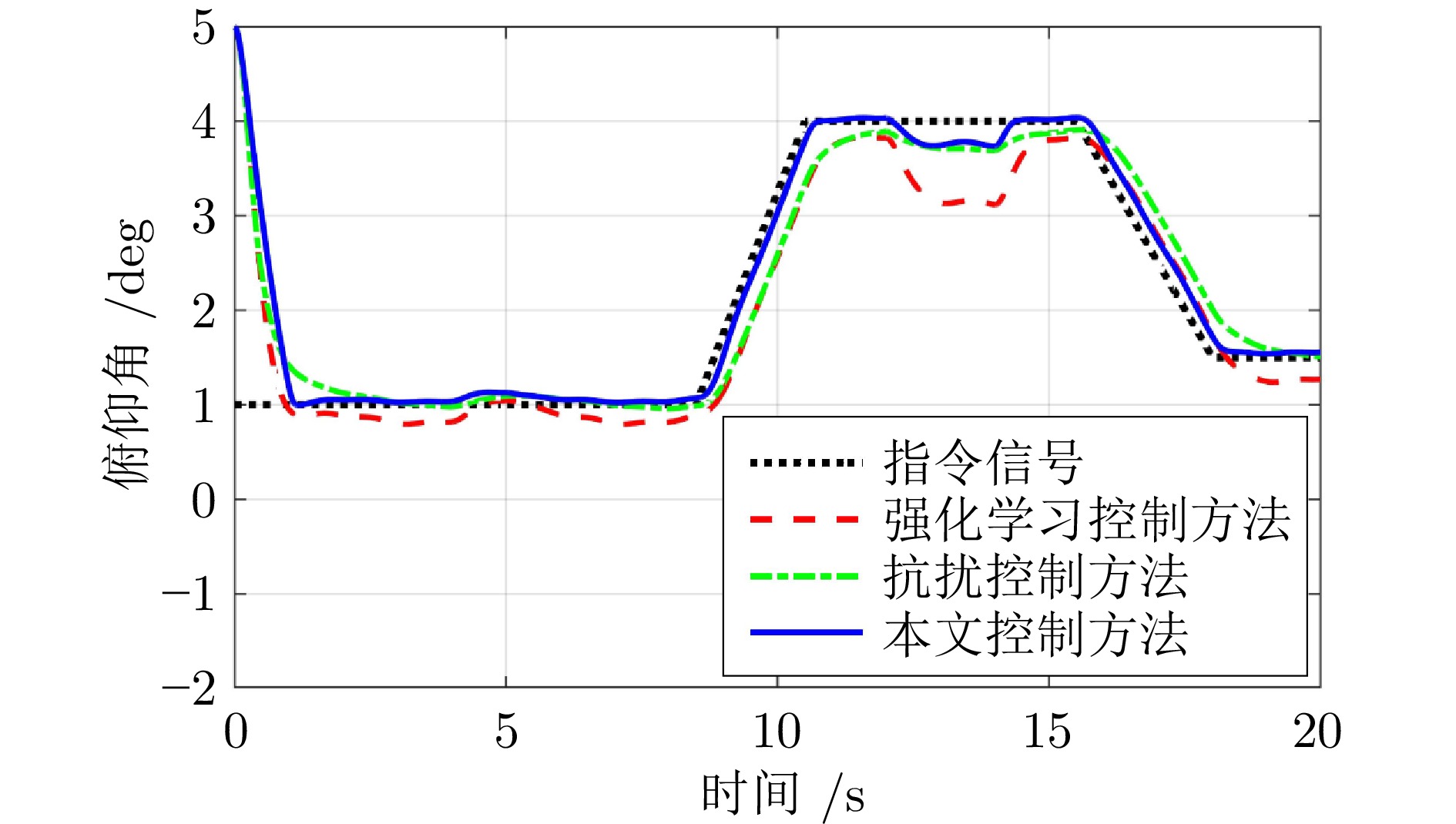
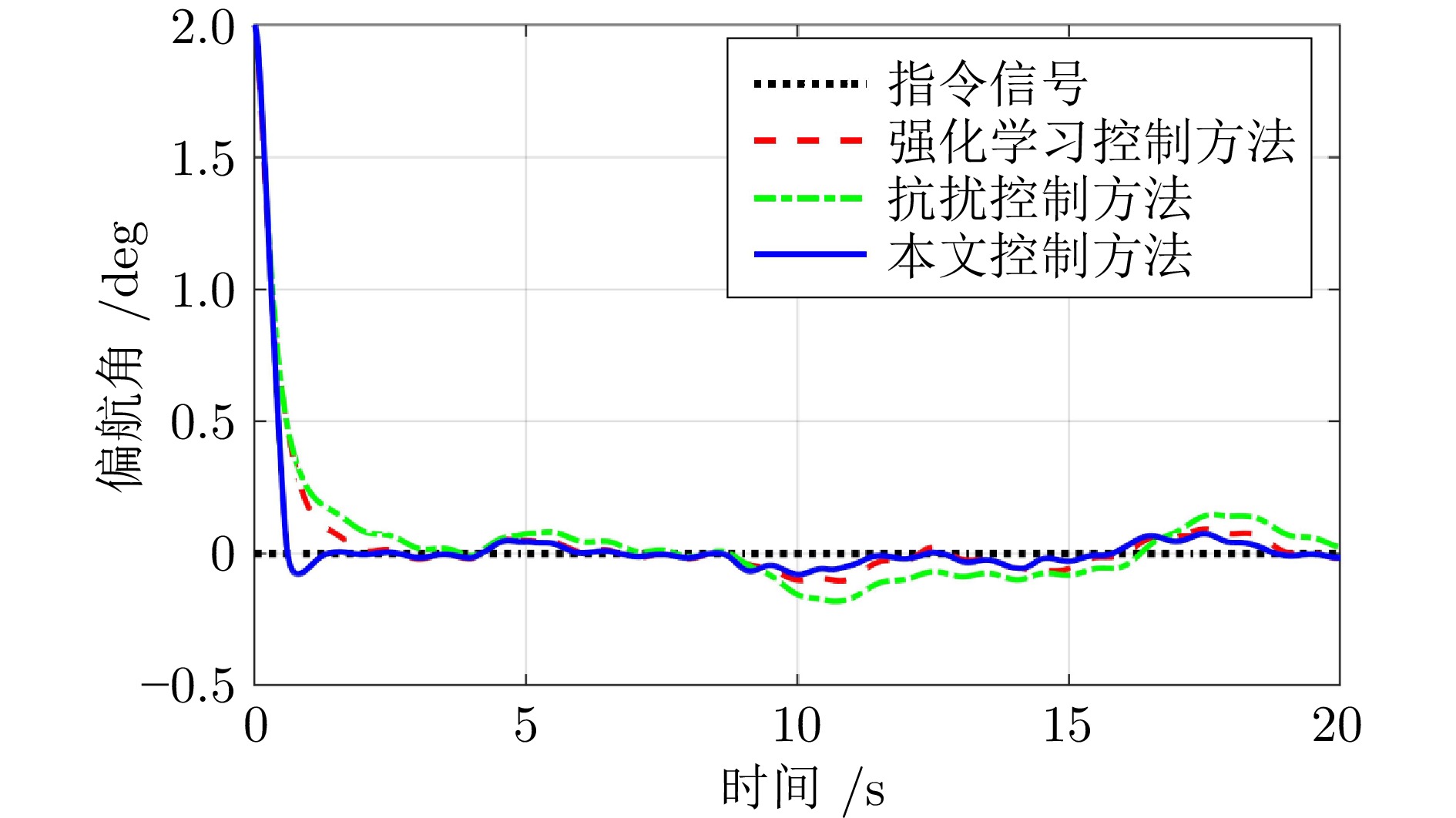
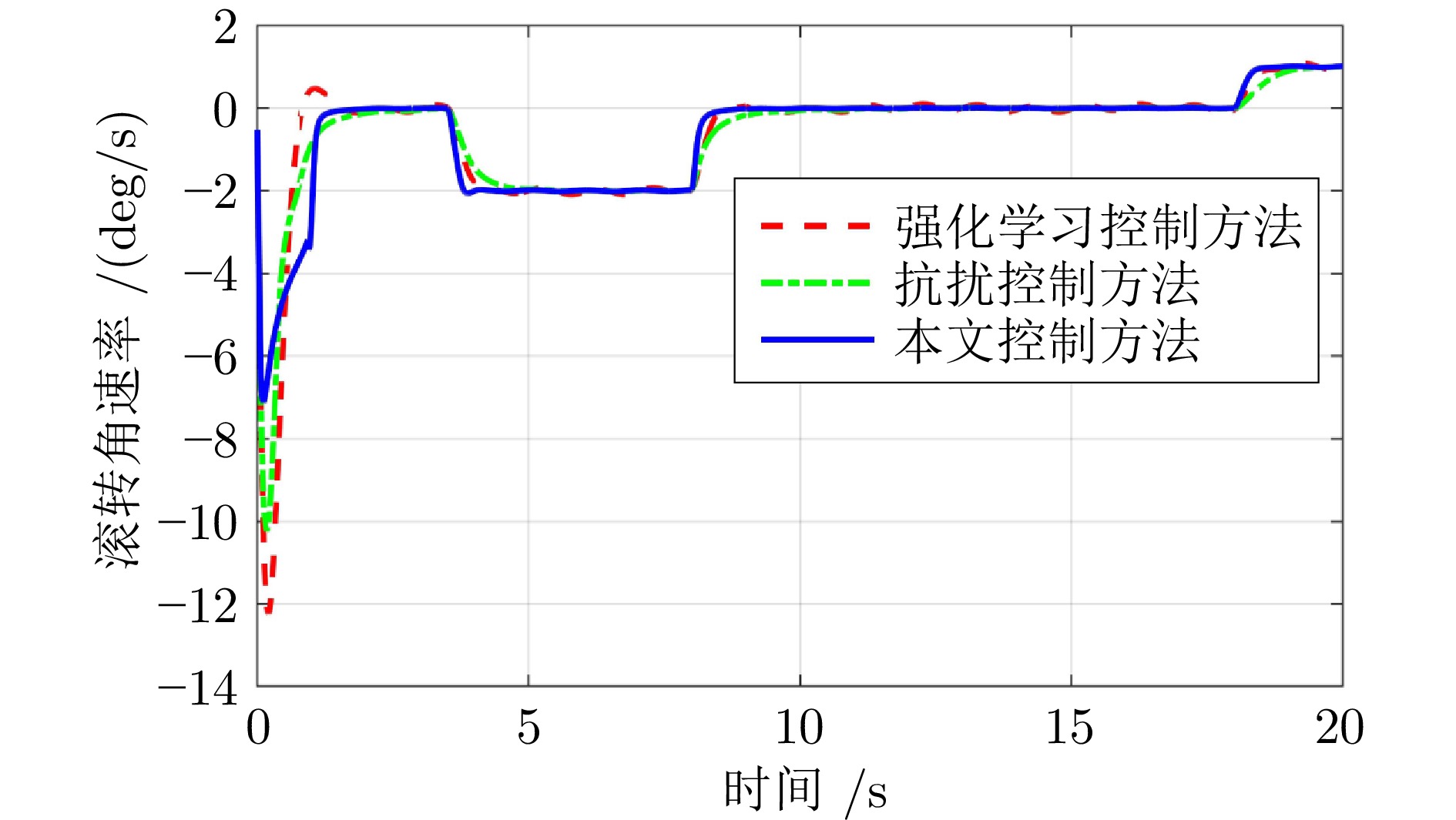
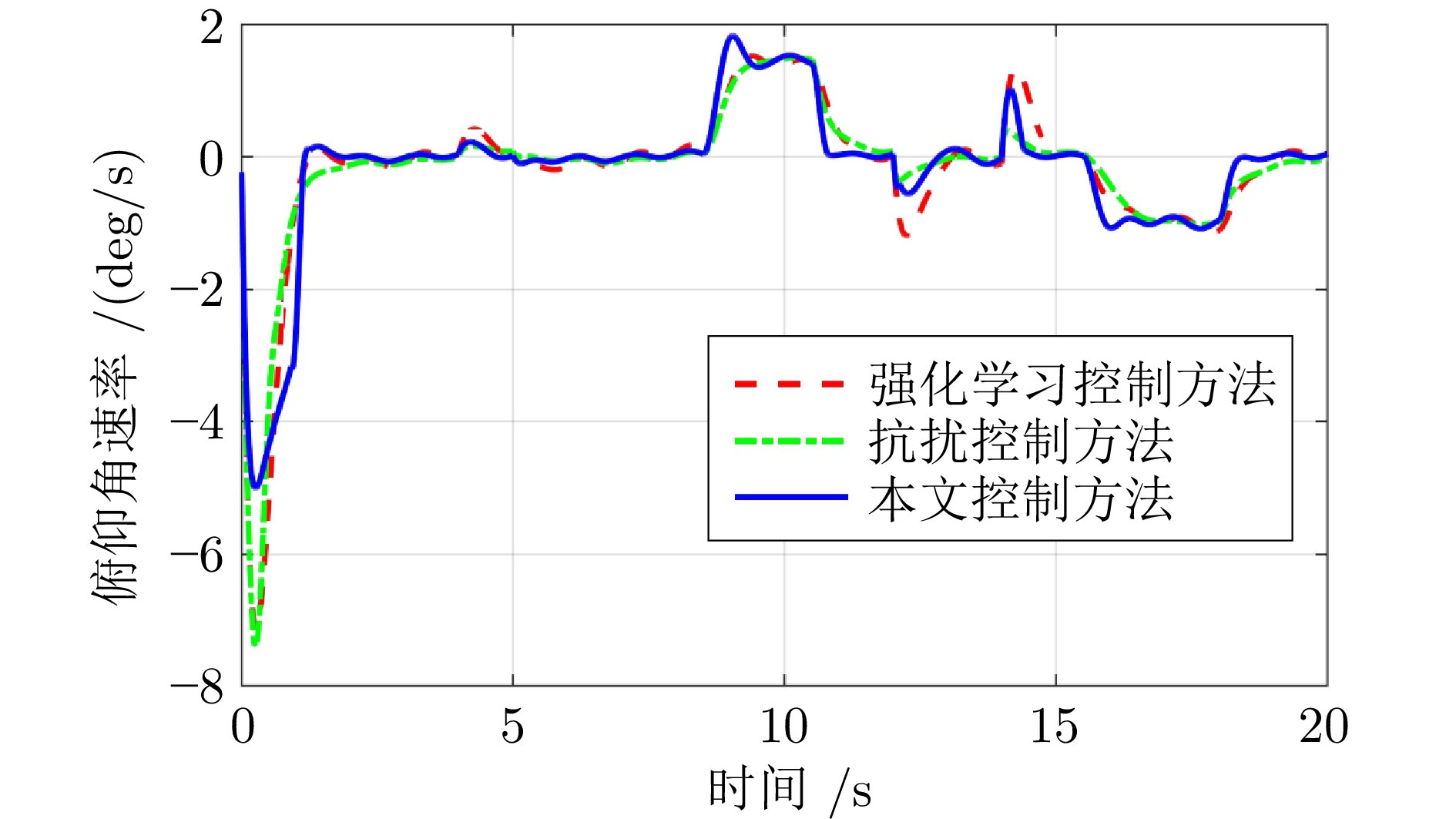
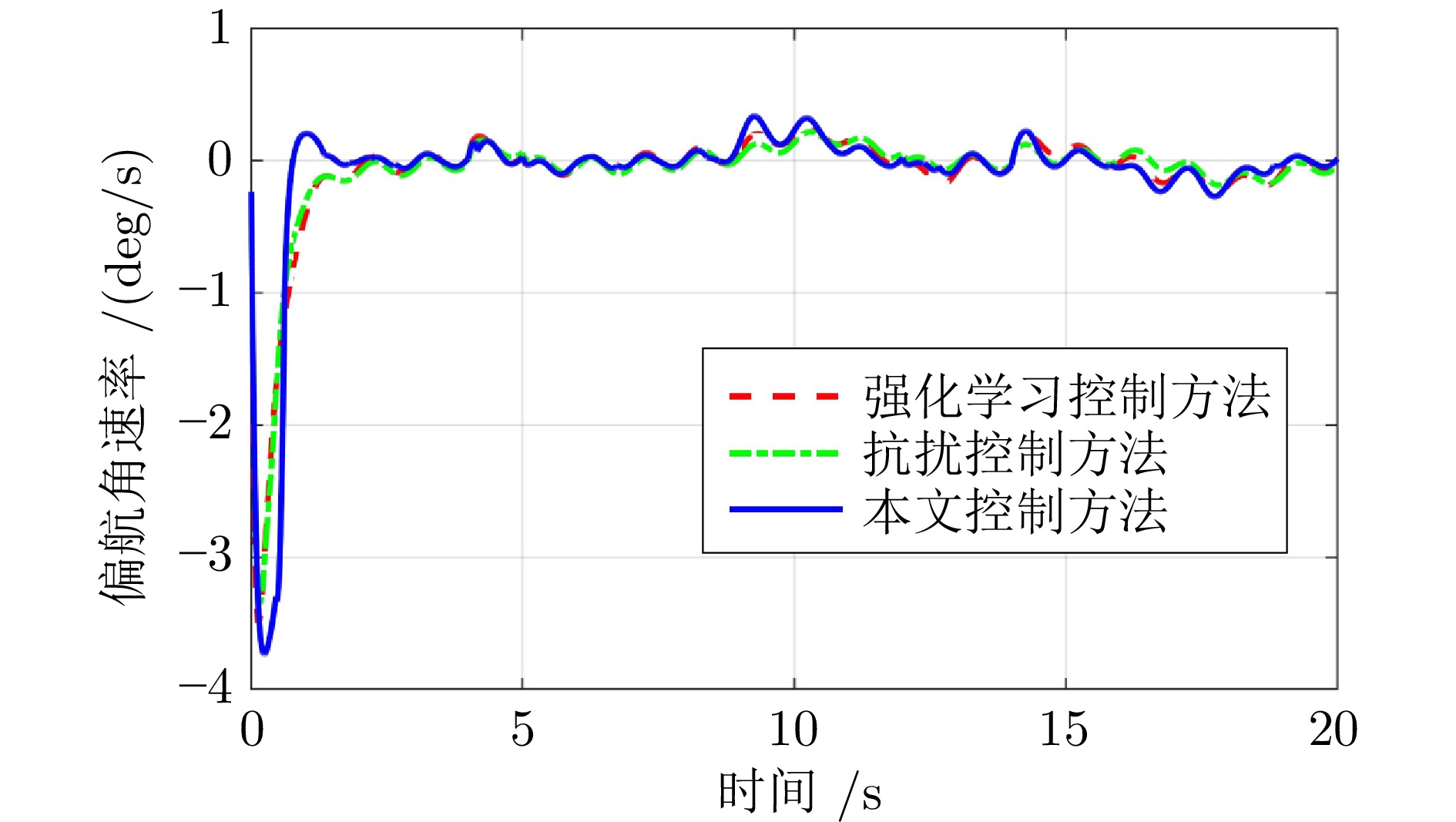
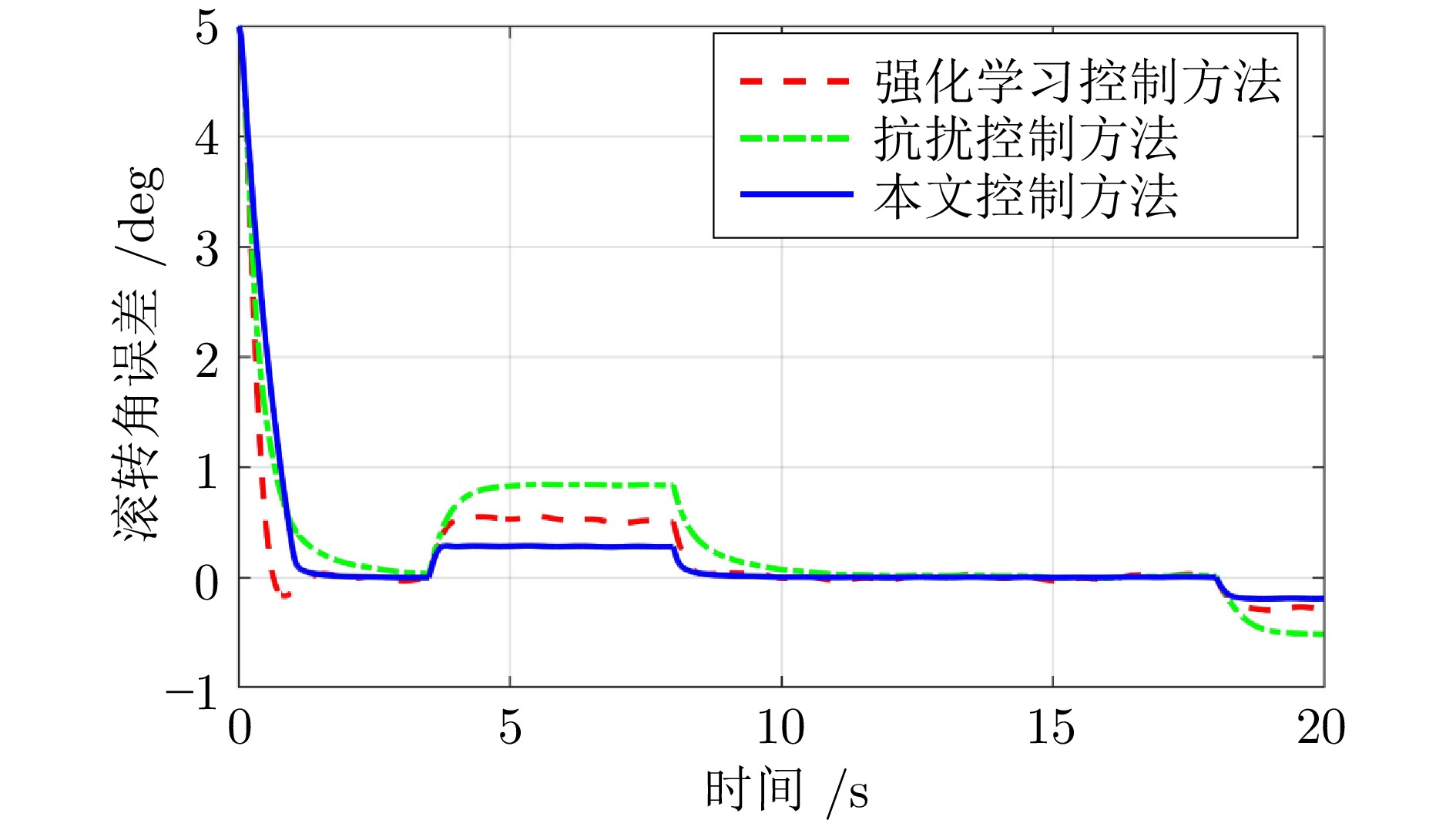
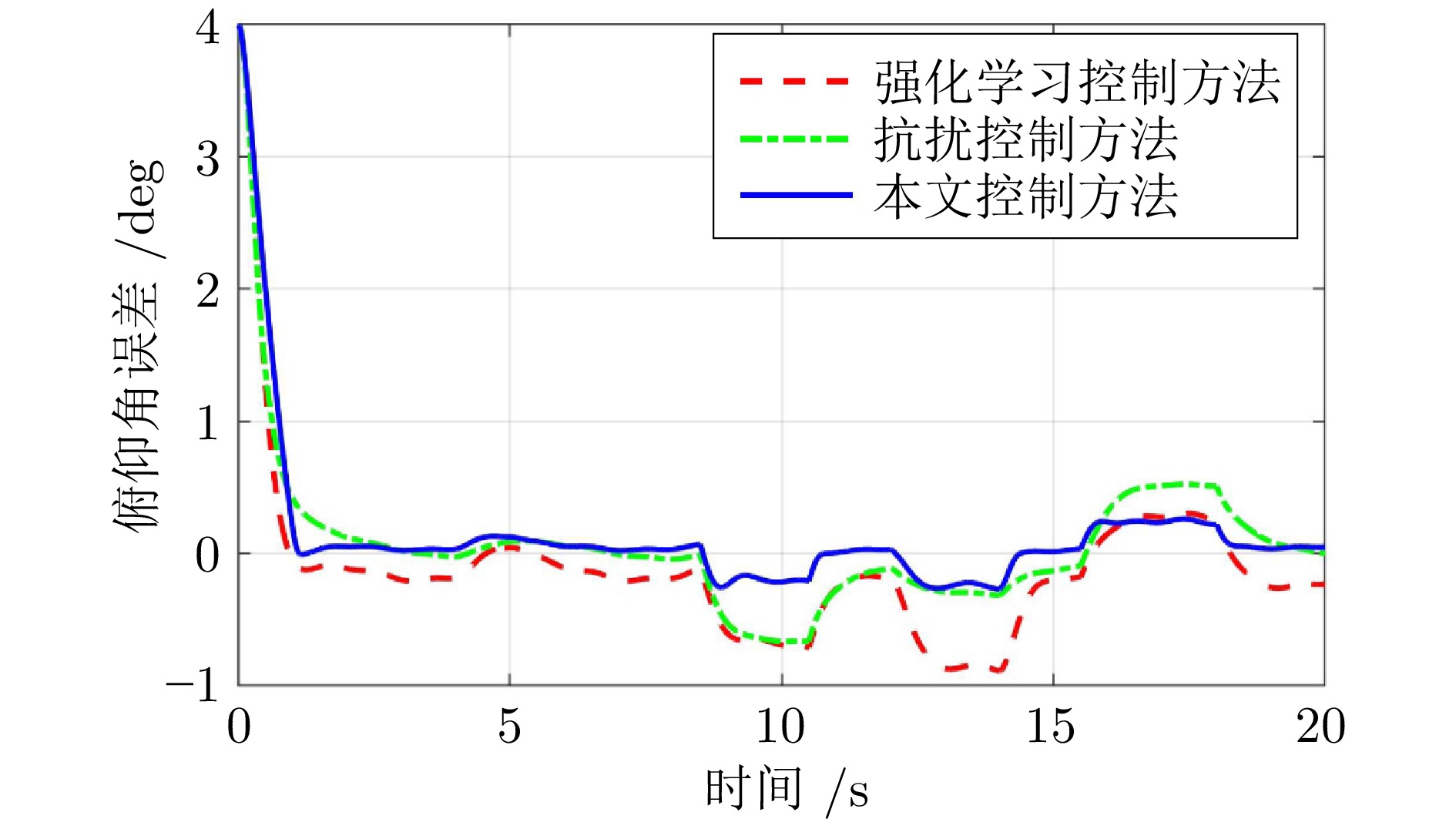
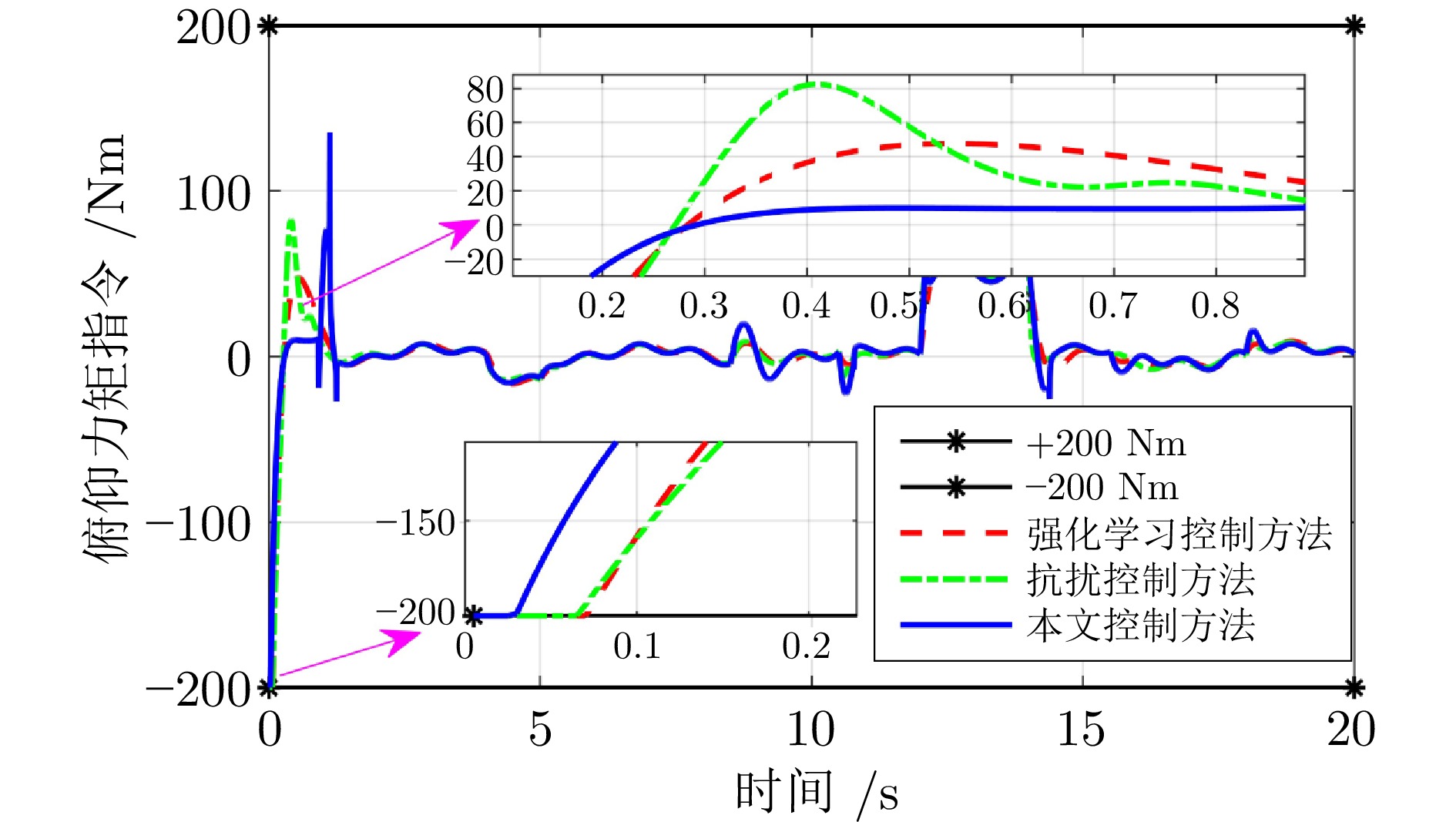
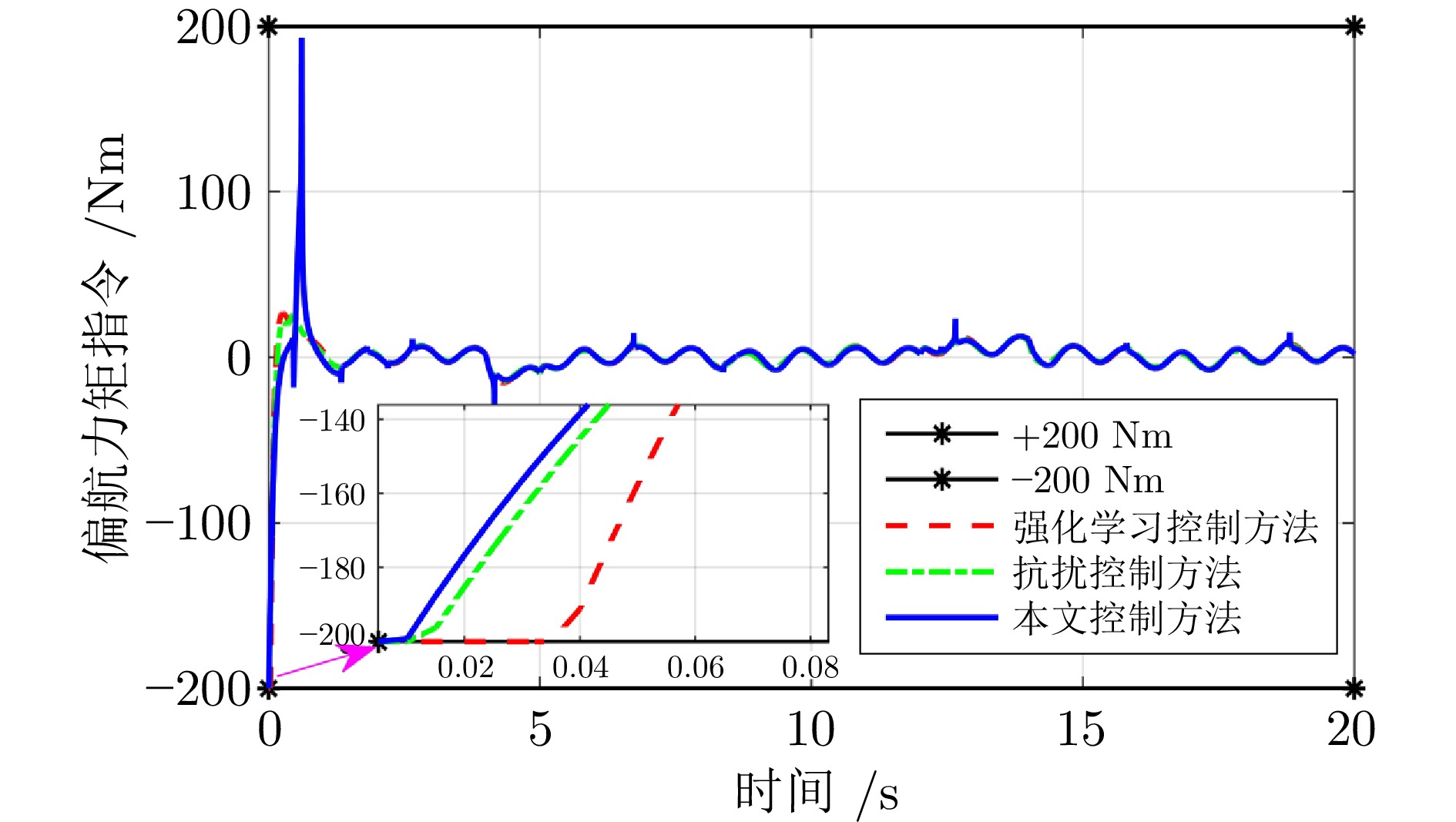
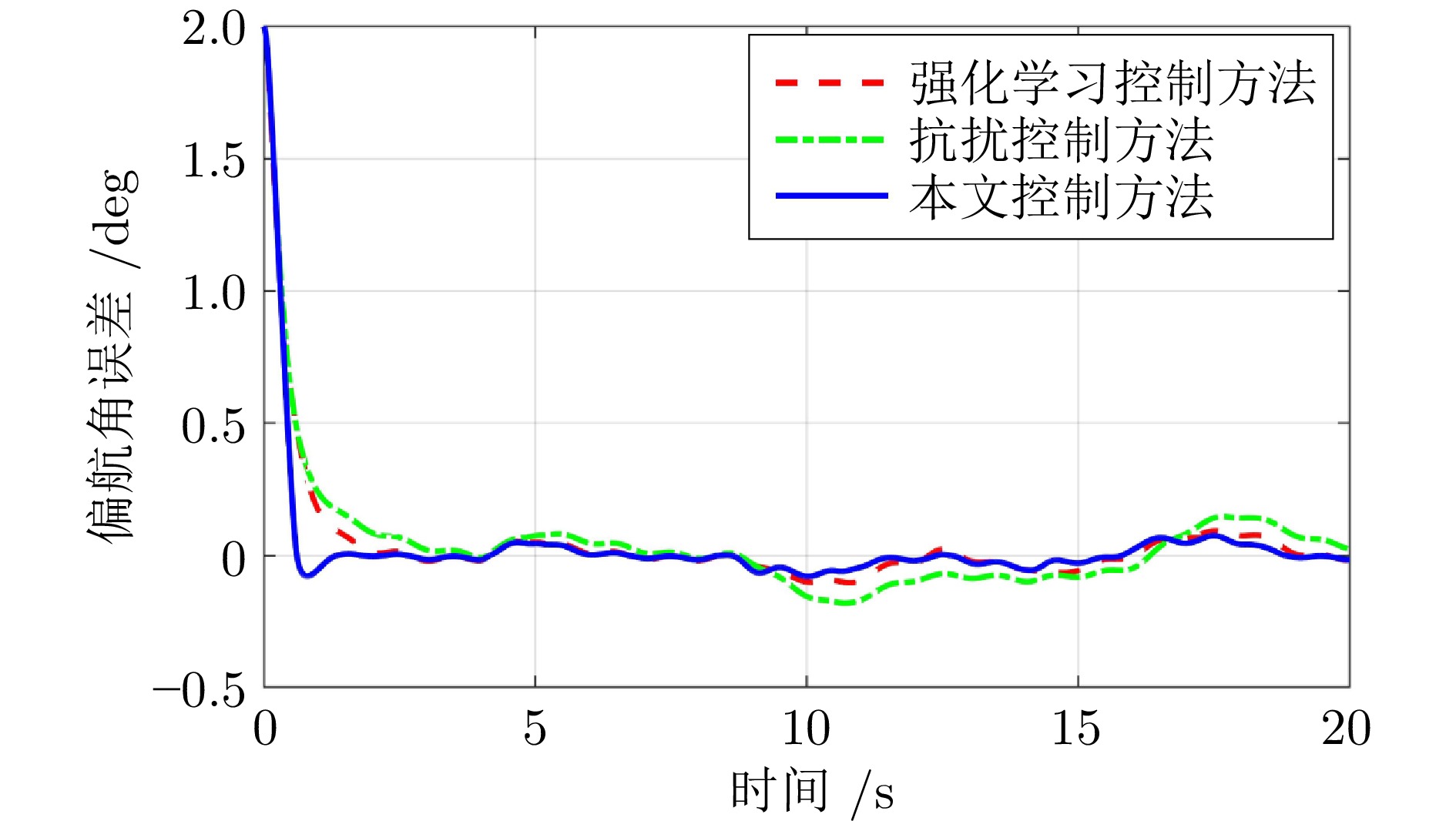
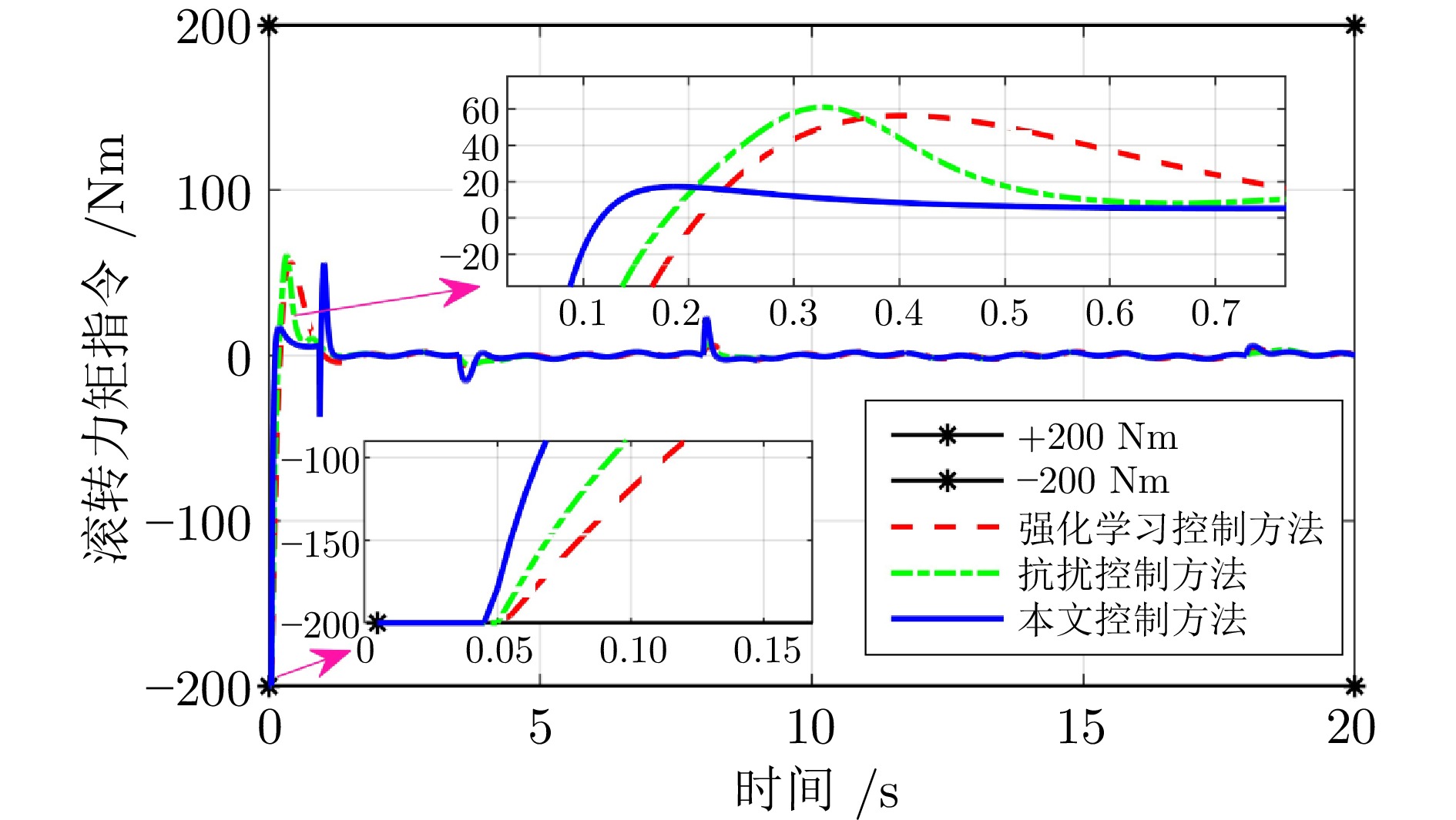
摘要: 针对高超声速变形飞行器在变形过程中面临的模型不确定性、强外部扰动及执行器饱和问题,提出一种复合控制方法. 该方法集成预设时间扰动观测器、抗饱和辅助系统与自适应动态规划.首先, 设计基于模糊系统的预设时间扰动观测器, 实现对集总扰动的快速精确估计与前馈补偿; 其次, 引入动态抗饱和辅助变量, 在控制量饱和后调整收敛轨迹从而减轻饱和, 并在饱和结束后引导系统收敛, 保障系统闭环稳定性; 进一步, 构建包含跟踪误差与控制能耗的综合代价函数, 采用自适应动态规划在线逼近最优控制律, 通过输入到状态稳定性理论证明闭环系统所有信号一致最终有界. 仿真结果表明, 所提控制方法在强扰动与执行器饱和条件下, 能实现姿态跟踪误差的预设时间收敛, 相比传统的抗扰控制与纯数据驱动方法, 具备更快的动态响应、更高的跟踪精度与更优的饱和抑制能力.
-
关键词:
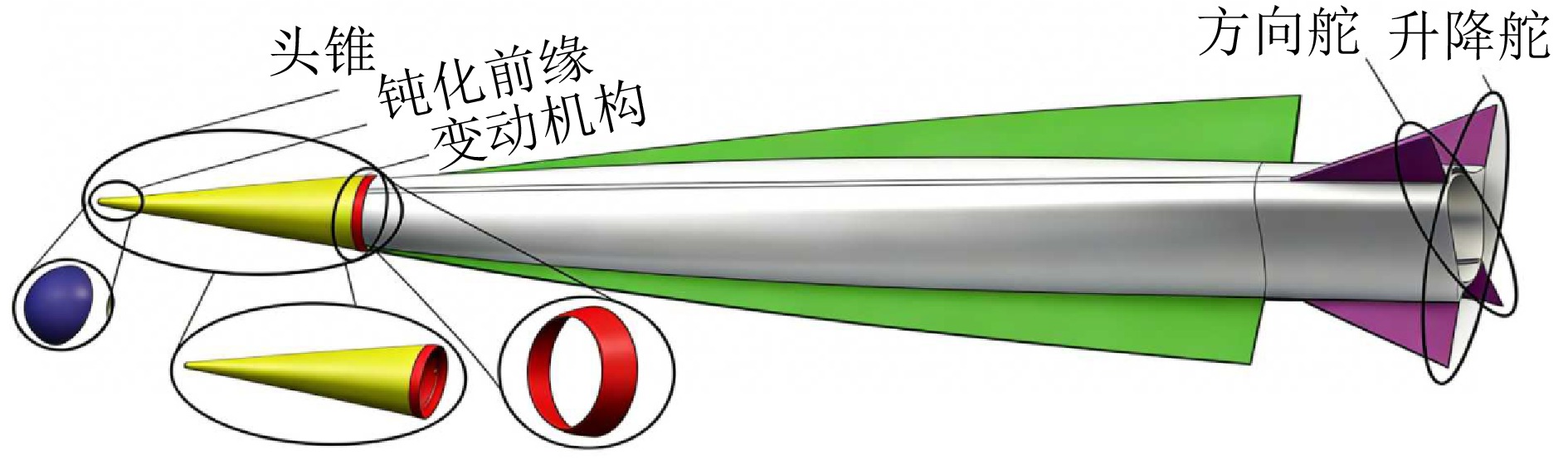
- 高超声速变形飞行器 /
- 预设时间模糊扰动观测器 /
- 抗饱和控制 /
- 自适应动态规划
Abstract: This paper proposes a composite control method to solve the problems of model uncertainties, strong external disturbances, and actuator saturation faced by hypersonic morphing vehicles during morphing. The method integrates a prescribed-time disturbance observer, an anti-saturation auxiliary system, and adaptive dynamic programming. Firstly, a prescribed-time disturbance observer based on a fuzzy system is designed to achieve fast and accurate estimation of lumped disturbances and feedforward compensation; Secondly, dynamic anti-saturation auxiliary variables are introduced to adjust the convergence trajectory after control saturation, thereby mitigating saturation effects, and to guide the system to converge after saturation ends, ensuring the closed-loop stability of the system; Furthermore, a comprehensive cost function incorporating tracking error and control energy consumption is constructed. Adaptive dynamic programming is employed to approximate the optimal control law online, and the input-to-state stability theory is utilized to prove that all signals of the closed-loop system are uniformly ultimately bounded. Simulation results demonstrate that the proposed control method can achieve preset-time convergence of attitude tracking errors under strong disturbances and actuator saturation conditions. Compared with traditional disturbance rejection control and purely data-driven methods, it exhibits faster dynamic response, higher tracking accuracy, and superior saturation suppression capability. -
表 1 基于模糊系统的预设时间扰动观测器参数
Table 1 Parameters of prescribed-time disturbance observer based on fuzzy system
参数 符号 取值 预设时间 $ T_d $ 0.5 增益系数 $ k_1、k_2 $ 1.5 预设时间指数 $ r_1、r_3 $ 0.8 模糊系统学习率 $ \gamma_1、\gamma_2、\gamma_3 $ 0.01 参数衰减系数 $ \kappa $ 0.01 隶属函数中心范围 $ L $ 5 隶属函数宽度 $ \sigma_{ij} $ $ L/3 $  下载: 导出CSV
下载: 导出CSV
表 2 预设时间抗饱和辅助系统参数
Table 2 Parameters of preset time anti-saturation auxiliary system
参数 符号 取值 预设时间 $ T_c $ 0.6 增益系数 $ a_c、b_c $ 1.2 收敛指数 $ r_c $ 0.7
下载: 导出CSV
表 3 预设性能控制律参数
Table 3 Parameters of preset performance control law
参数 符号 取值 滑模系数矩阵 $ c $ $ {\rm{diag}}\{2,\;2,\;2\} $ 滑模趋近增益矩阵 $ K_s $ $ {\rm{diag}}\{5,\;5,\;5\} $ 滑模指数 $ \alpha_0 $ 0.5 预设性能初始边界 $ \lambda_0 $ 5 预设性能稳态边界 $ \lambda_{\infty} $ 0.2 收敛速率 $ \beta_i $ 2
下载: 导出CSV
表 4 基于ADP的控制律参数
Table 4 Parameters of control law based on ADP
参数 符号 取值 Critic网络稳定参数 $ \alpha_{c1} $ 0.01 Critic网络学习率 $ \alpha_{c2} $ 0.01 折扣因子 $ \gamma $ 0.99 控制权重矩阵 $ R $ $ {\rm{diag}}\{1,\;1,\;1\} $ 状态权重矩阵 $ Q $ $ {\rm{diag}}\{5,\;5,\;5\} $ 缓冲区大小 $ M $ 100
下载: 导出CSV
表 5 对比方法控制器参数
Table 5 Parameters of comparison method controller
控制器 参数值 抗扰控制器 $ \xi = 0.75 $、$ \omega_o = 5 $、$ \omega_b = 8 $、 $ \beta_1 = 16 $、$ \beta_2 = 64 $ 强化学习控制器 $ \mu_a = 0.01 $、$ \mu_c = 0.001 $, $ \rho_a = 0.9 $、$ \rho_c = 0.9 $、 $ R = {\rm{diag}}\{1,\;1,\;1\} $、 $ Q = {\rm{diag}}\{5,\;5,\;5,\;1,\;1\} $
下载: 导出CSV
-
[1] Peng W Y, Yang T, Feng Z W, Zhang Q B. Analysis of morphing modes of hypersonic morphing aircraft and multiobjective trajectory optimization. IEEE Access, 2018, 7: 2244 doi: 10.1109/access.2018.2886252 [2] Weisshaar T A. Morphing aircraft systems: Historical perspectives and future challenges. Journal of aircraft, 2013, 50(2): 337−353 doi: 10.2514/1.C031456 [3] Jiao X, Fidan B, Jiang J, Kamel M. Adaptive mode switching of hypersonic morphing aircraft based on type-2 TSK fuzzy sliding mode control. Science China Information Sciences, 2015, 58(7): 1−15 [4] 何晟. 弹性高超声速变形飞行器强鲁棒控制方法研究[D]. 国防科学技术大学, 2021.He Sheng. Research on strong robust control methods for elastic hypersonic morphing vehicles. National University of Defense Technology, 2021. [5] 马文风. 高超声速变形飞行器建模与纵向鲁棒控制方法研究[D]. 长沙: 国防科学技术大学, 2017.MA Wen-Feng. Research on modelling and longitudinal robust control method of hypersonic deformation vehicle. Changsha: National University of Defence Technology, 2017. [6] 曹承钰, 李繁飙, 廖宇新, 殷泽阳, 桂卫华. 高超声速变外形飞行器建模与固定时间预设性能控制. 自动化学报, 2024, 50(3): 486−504 doi: 10.16383/j.aas.c230240Cao Cheng-Yu, Li Fan-Biao, Liao Yu-Xin, Yin Ze-Yang, Gui Wei-Hua. Modeling and fixed-time prescribed performance control for hypersonic morphing vehicles. Acta Automatica Sinica, 2024, 50(3): 486−504 doi: 10.16383/j.aas.c230240 [7] Wen Guang-Hui, Wang Li-Nan, Zhao Dan, Zheng De-Zhi, Huang Ting-Wen. Attitude estimation for rigid aircraft with time-varying gyro bias: A finite-time complementary filtering approach. Guidance, Navigation and Control, 2025, 05(4): 445−458 doi: 10.1142/S2737480725500268 [8] Chen Hao-Lan, Wang Peng, Tang Guo-Jian. Fuzzy disturbance observer-based fixed-time sliding mode control for hypersonic morphing vehicles with uncertainties. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(4): 3521−3530 doi: 10.1109/TAES.2022.3227886 [9] Zhang Hao, Bao Chun-Yu, Ma Wen-Hui, Wang Peng, Tang Guo-Jian, Bao Wei-Min. Prescribed-time attitude control for hypersonic morphing vehicles using morphing information-driven events. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(3): 5540−5559 doi: 10.1109/TAES.2024.3506512 [10] Song Fang-Hui, Yang Ren-Ming, Han Wei, Li Wen-Bo. Adaptive predefined-time tracked control for full-state constrained nonlinear systems with disturbance and uncertainties. Physica Scripta, 2026, 101(2): Article No. 026004 doi: 10.1088/1402-4896/ae3449 [11] 张豪, 王鹏, 汤国建, 包为民. 高超声速变外形飞行器事件触发有限时间控制. 航空学报, 2023, 44(15): 325−338Zhang Hao, Wang Peng, Tang Guo-Jian, Bap Wei-Min. Event-triggered finite-time control for hypersonic morphing vehicles. Acta Aeronautica et Astronautica Sinica, 2023, 44(15): 325−338 [12] 陈宇腾, 常晶, 陈为胜, 李小平, 包为民. 一种高超声速飞行器的纵向变形与飞行最优协调控制方法. 宇航学报, 2025, 46(3): 485−498 doi: 10.3873/j.issn.1000-1328.2025.03.007Chen Yu-Teng, Chang Jing, Chen Wei-Sheng, Li Xiao-Ping, Bao Wei-Min. An optimal coordinated control method for longitudinal deformation and flight of hypersonic vehicles. Journal of Astronautics, 2025, 46(3): 485−498 doi: 10.3873/j.issn.1000-1328.2025.03.007 [13] Bao Chun-Yu, Wang Peng, Tang Guo-Jian. Data-driven based model-free adaptive optimal control method for hypersonic morphing vehicle. IEEE Transactions on Aerospace and Electronic Systems, 2022, 59(4): 3713−3725 doi: 10.1109/taes.2022.3230633 [14] Li Shi-Hong, Shao Xing-Ling, Wang Hong-Yu, Liu Jun, Zhang Qin-Zhen. Adaptive critic attitude learning Ccntrol for hypersonic morphing vehiclves without backstepping. IEEE Transactions on Aerospace and Electronic Systems, 2025, 61(2): 1234−1245 doi: 10.1109/taes.2025.3542345 [15] Luo Rui-Ning, He Guang-Jun, Zhang Tao. Hypersonic flight vehicles anti-saturation control with flexible prescribed constraints. IEEE Journal on Miniaturization for Air and Space Systems, 2025, 6(1): 45−56 doi: 10.1109/jmass.2025.3546463 [16] Zhang Bang-Chu, Liang Yi-Hong, Rao Shui-Tao, Kuang Yu, Zhu Wei-Yu. RBFNN-based anti-input saturation control for hypersonic vehicles. Aerospace, 2024, 11(2): Article No. 108 doi: 10.3390/aerospace11020108 [17] 韦常柱, 顾鑫, 李玉龙. 高超声速变外形飞行器固定时间抗饱和控制. 宇航学报, 2025, 46(4): 731−740 doi: 10.3873/j.issn.1000-1328.2025.04.008Wei Chang-Zhu, Gu Xin, Li Yu-Long. Fixed-time anti-saturation control for hypersonic morphing vehicles. Journal of Astronautics, 2025, 46(4): 731−740 doi: 10.3873/j.issn.1000-1328.2025.04.008 [18] Riaz Saleem, Li Bing-Qiang, Qi Rong, Zhang Chen-Da. An adaptive predefined time sliding mode control for uncertain nonlinear cyber-physical servo system under cyber attacks. Scientific Reports, 2024, 14(1): Article No. 7361 doi: 10.1038/s41598-024-57775-8 [19] Mironchenko Andrii. Input-to-state stability[M]//Input-to-State Stability: Theory and Applications. Cham: Springer International Publishing, 2023: 41-115 [20] 姚秀明, 邢文龙, 韩一睿. 高超声速飞行器基于Tube的鲁棒模型预测跟踪控制. 自动化学报, 2025, 51(11): 2486−2497 doi: 10.16383/j.aas.c250279Yao Xiu-Ming, Xing Wen-Long, Han Yi-Rui. Tube-based robust model predictive tracking control for hypersonic vehicles. Acta Automatica Sinica, 2025, 51(11): 2486−2497 doi: 10.16383/j.aas.c250279 [21] Wang Li-Xin, Mendel Jerry M. Fuzzy basis functions, universal approximation, and orthogonal least-squares learning. IEEE Transactions on Neural Networks, 1992, 3(5): 807−814 doi: 10.1109/72.159070 [22] 朴敏楠, 孙明玮, 黄建, 陈增强. 基于自抗扰的高超声速飞行器姿态鲁棒控制. 控制工程, 2019, 26(09): 1627−1635 doi: 10.14107/j.cnki.kzgc.170568Piao Min-Nan, Sun Ming-Wei, Huang Jian, Chen Zeng-Qiang. Attitude robust control for hypersonic vehicles based on active disturbance rejection. Control Engineering, 2019, 26(09): 1627−1635 doi: 10.14107/j.cnki.kzgc.170568 [23] Li R F, Hu L, Cai L. Adaptive tracking control of a hypersonic flight aircraft using neural networks with reinforcement synthesis. Aero Weaponry, 2018, 6: 3−10 -

 下载:
下载:

计量
- 文章访问数: 173
- HTML全文浏览量: 269
- 被引次数: 0
