

Prescribed-time Consensus Control for Multi-agent Systems Under Complex Spatial Constraints
-
摘要: 多智能体系统执行任务过程中需规避障碍、分布式交互信息, 以保证作业安全性、可靠性, 使得其作业空间受到防碰撞及障碍躲避的安全区域、通信连通性保持的智能体间有限相对位置约束. 为此, 本文研究在上述复杂空间约束下的多智能体预设时间一致性控制问题. 根据智能体与障碍物之间的安全距离, 区分多智能体系统作业过程为障碍规避模态及协同作业模态进行全作业过程描述. 在障碍规避模态, 除传统的智能体间及与障碍物碰撞安全距离约束外, 设计有通信距离约束的避障控制律, 保障在复杂空间障碍环境协同穿越情况下的作业安全性, 以及穿越障碍物后的分布式通信连通性, 防止协同避障后部分智能体断联、中断协同作业任务. 在协同作业模态, 针对传统有限时间稳定相关方法的收敛时间依赖系统初值的缺陷, 提出含时变增益的预设时间控制器设计方法, 实现在协同避障后初值不确定情况下的收敛时间预设, 提高了多智能体系统作业可靠性. 最后, 以二阶多智能体系统为例进行数值仿真, 验证了提出方法的有效性.Abstract: During the task execution, multi-agent systems (MAS) are required to avoid obstacles and exchange information in a distributed manner, so as to ensure operational safety and reliability. Consequently, the workspace of MAS is constrained by safety regions for collision and obstacle avoidance, as well as by limited relative position among agents that maintain communication connectivity. To address these challenges, this paper investigates the prescribed-time consensus control problem for MAS under the aforementioned complex spatial constraints. Based on the safe distance between agents and obstacles, the entire operational process is described by dividing it into two distinct modes, including the obstacle avoidance mode and the cooperative operation mode. In the obstacle avoidance mode, in addition to the traditional safety distance constraints for inter-agent and agent-obstacle collisions, an obstacle avoidance control law with communication distance constraints is designed. Such that the operational safety is ensured when cooperatively traversing complex spatial obstacle environments and preserves distributed communication connectivity after the obstacles are passed, thereby preventing agent disconnection and interruption of cooperative operational tasks after cooperative obstacle avoidance. As for the cooperative operation mode, to overcome the limitation of traditional finite-time stable methods whose convergence time depends on initial system conditions, a prescribed-time controller design method with time-varying gain is proposed, which achieves prescribed convergence time under uncertain initial conditions following cooperative obstacle avoidance, thus enhancing the operational reliability of MAS. Finally, numerical simulations are performed to verify the effectiveness of the proposed method, where a second-order MAS is taken as an example.
-
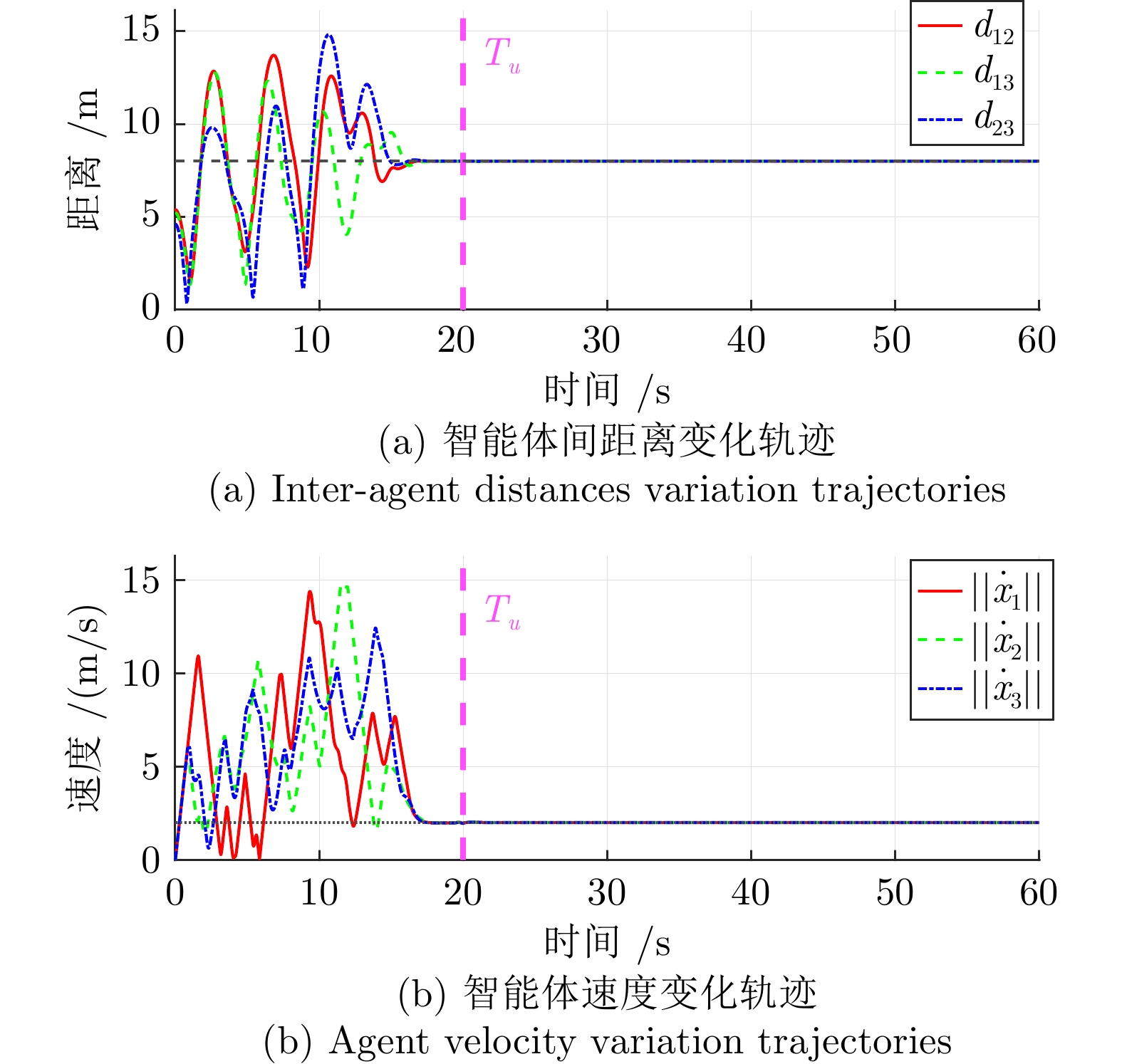
图 2 智能体间距离和速度变化轨迹 ($ T_u=20\; \mathrm{s}$)
Fig. 2 Inter-agent distances and velocity variation trajectories ($ T_u=20\; \mathrm{s}$)
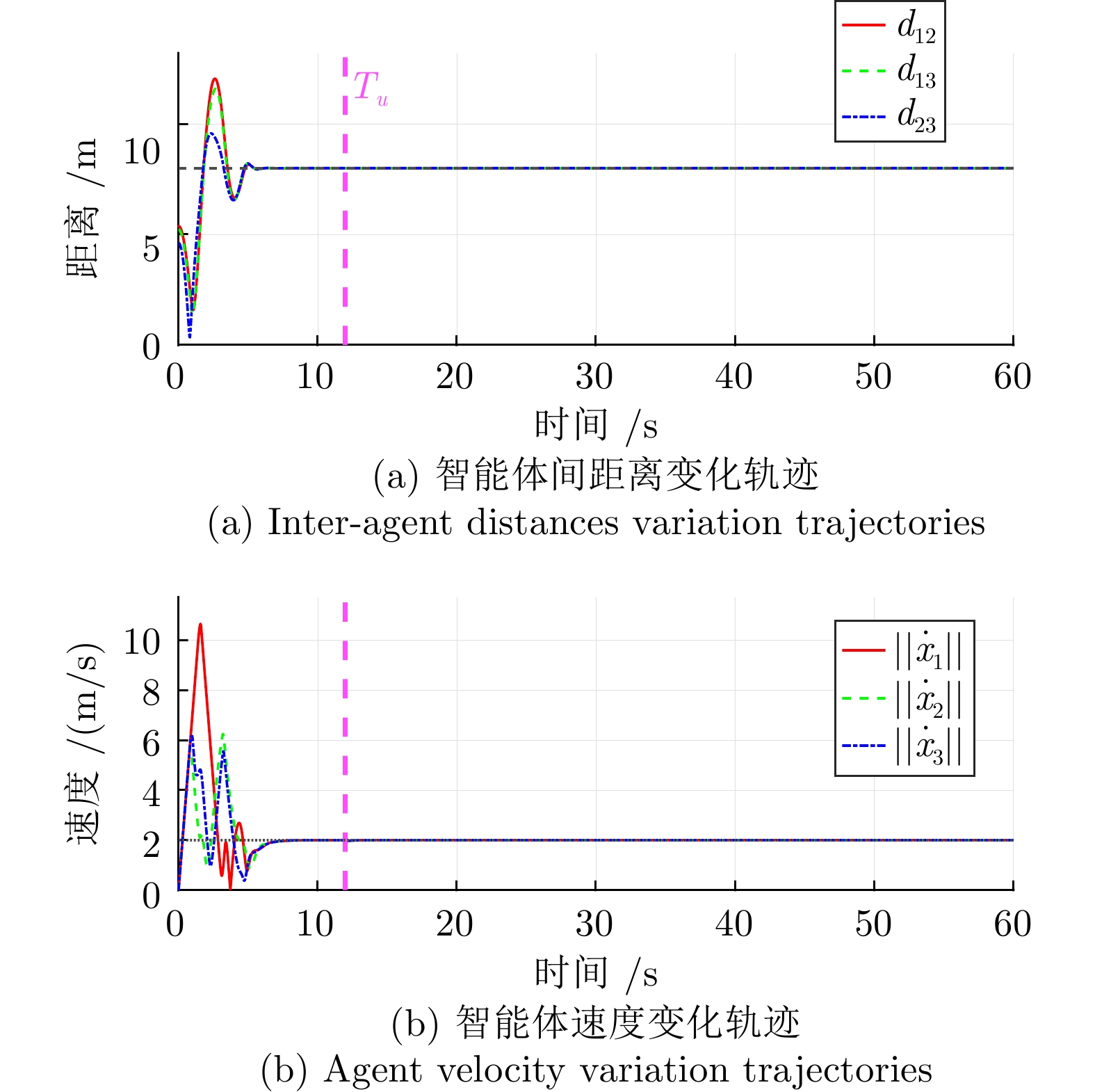
图 3 智能体间距离和速度变化轨迹 ($ T_u=12\; \mathrm{s}$)
Fig. 3 Inter-agent distances and velocity variation trajectories ($ T_u=12\; \mathrm{s}$)
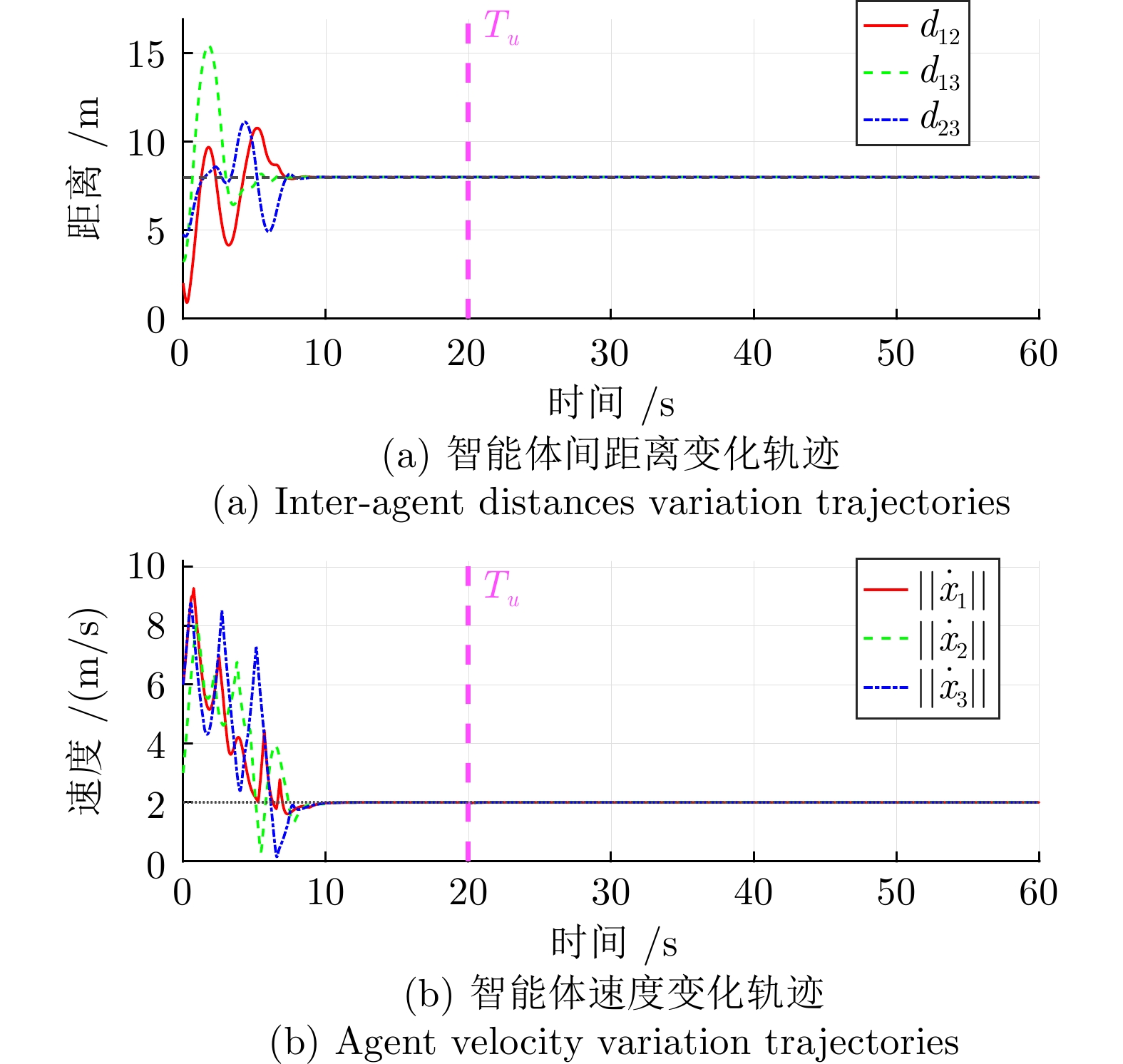
图 4 智能体间距离和速度变化轨迹 (初始速度变化)
Fig. 4 Inter-agent distances and velocity variation trajectories (initial velocity change)
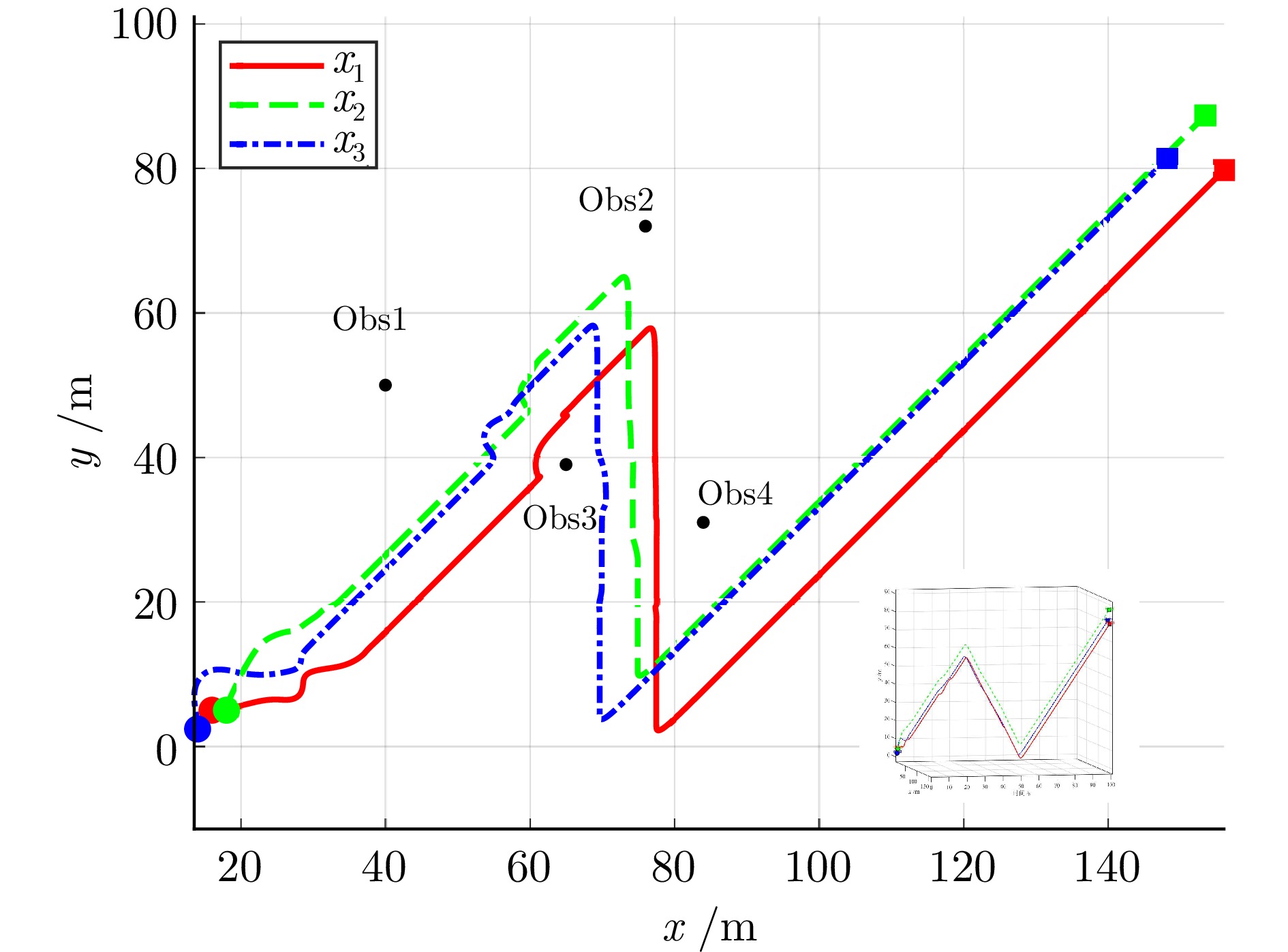
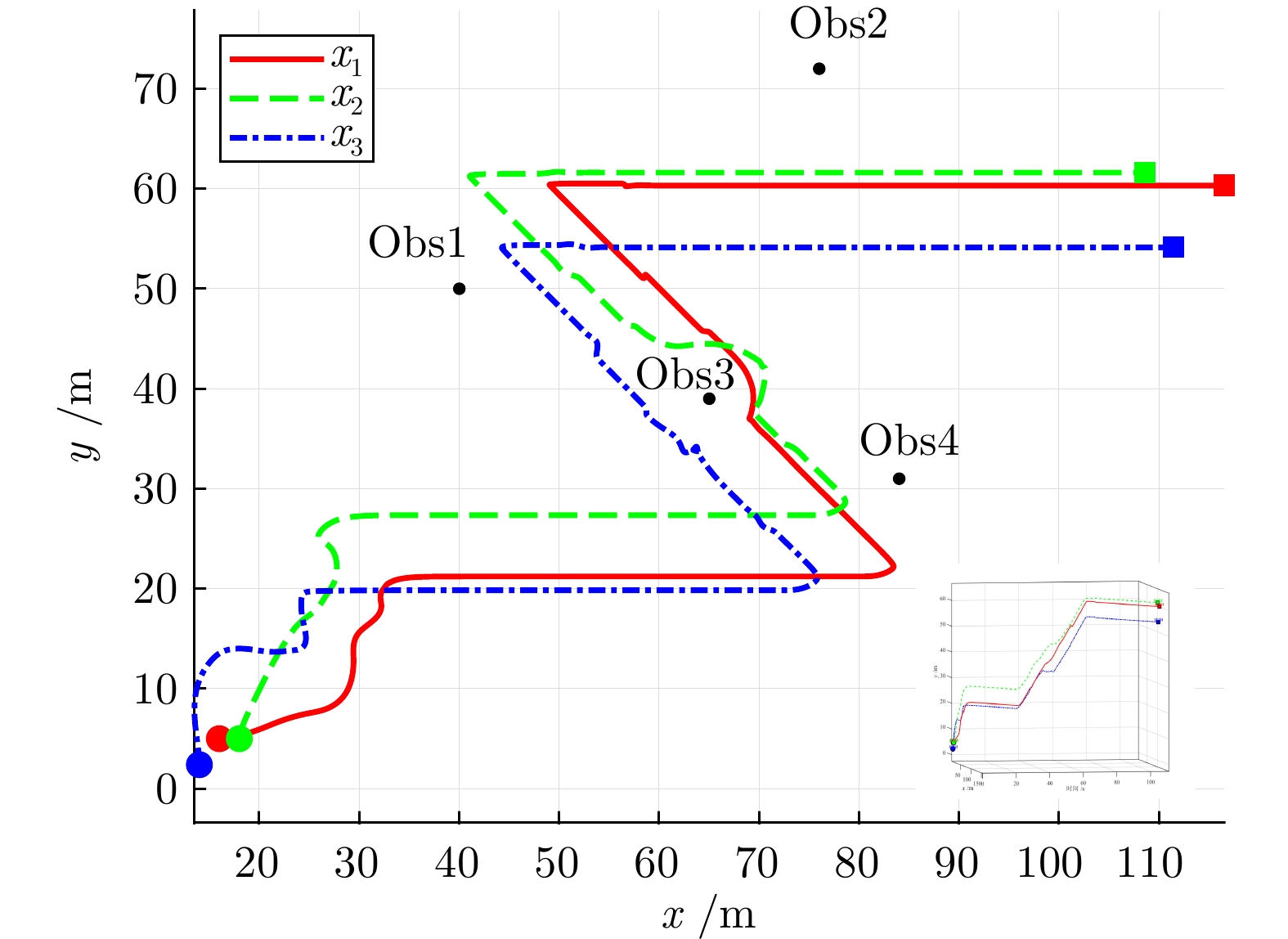
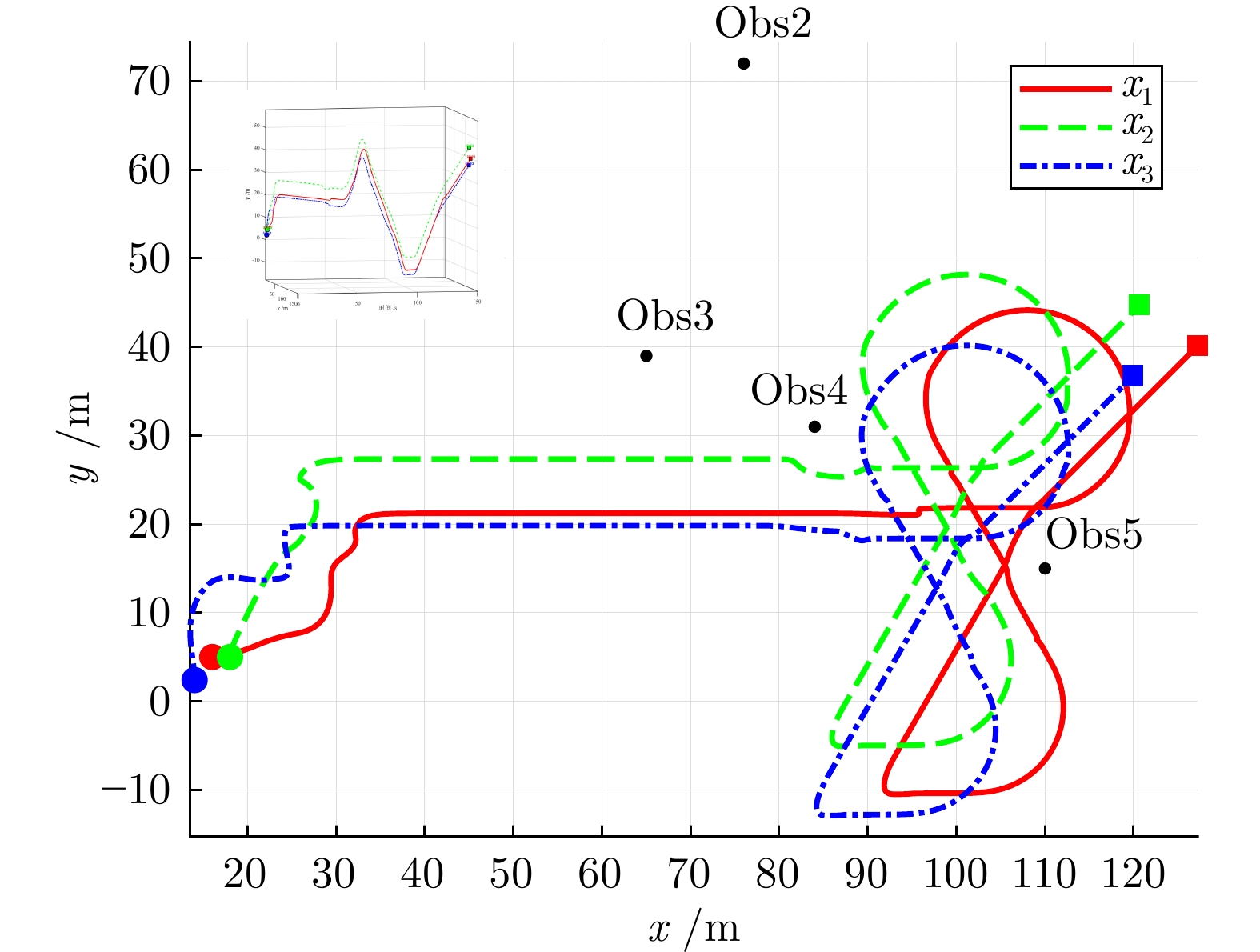
图 11 N字形轨迹的智能体间距离和速度变化轨迹
Fig. 11 Inter-agent distances and velocity variation trajectories of N-shaped trajectory
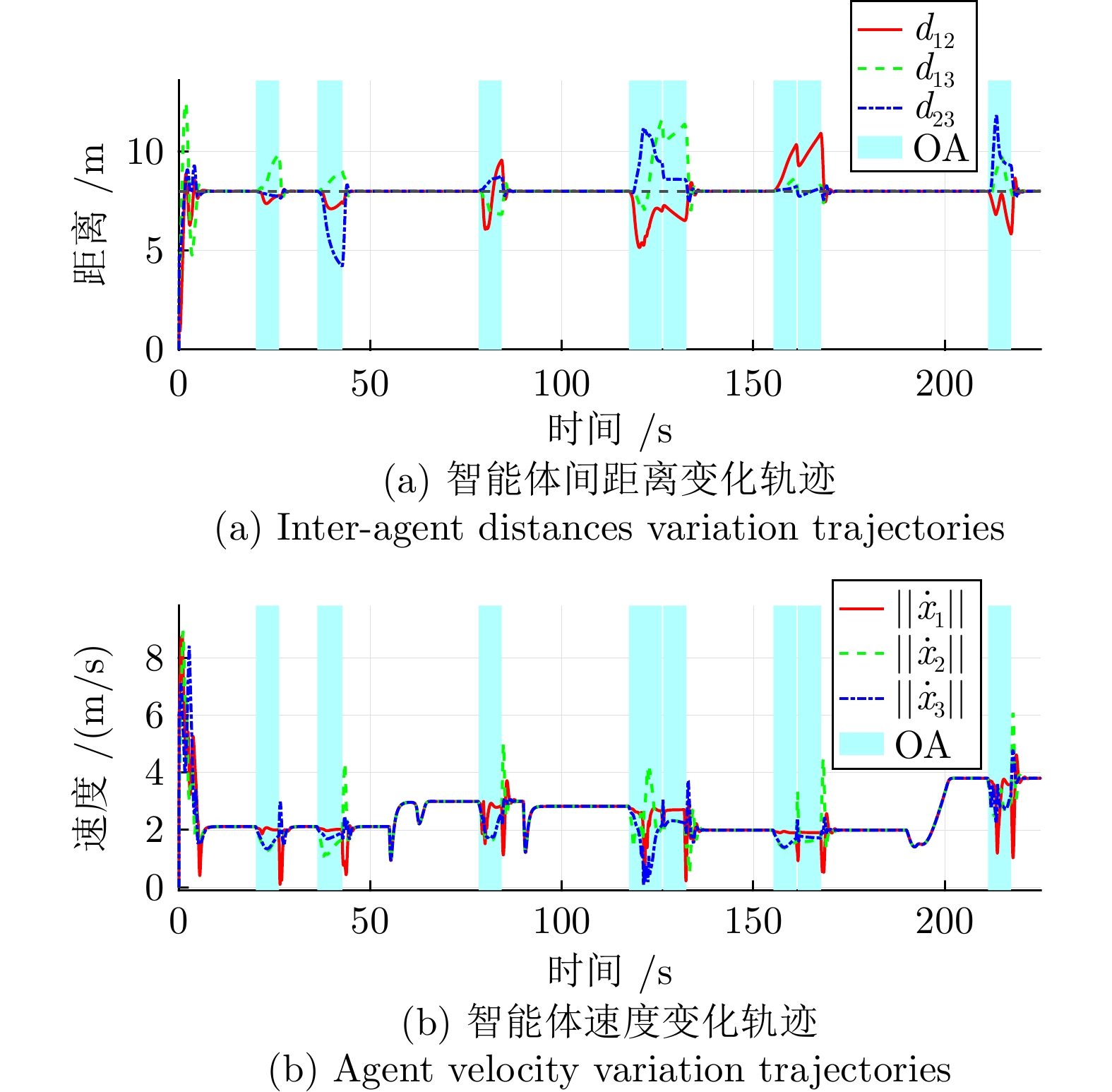
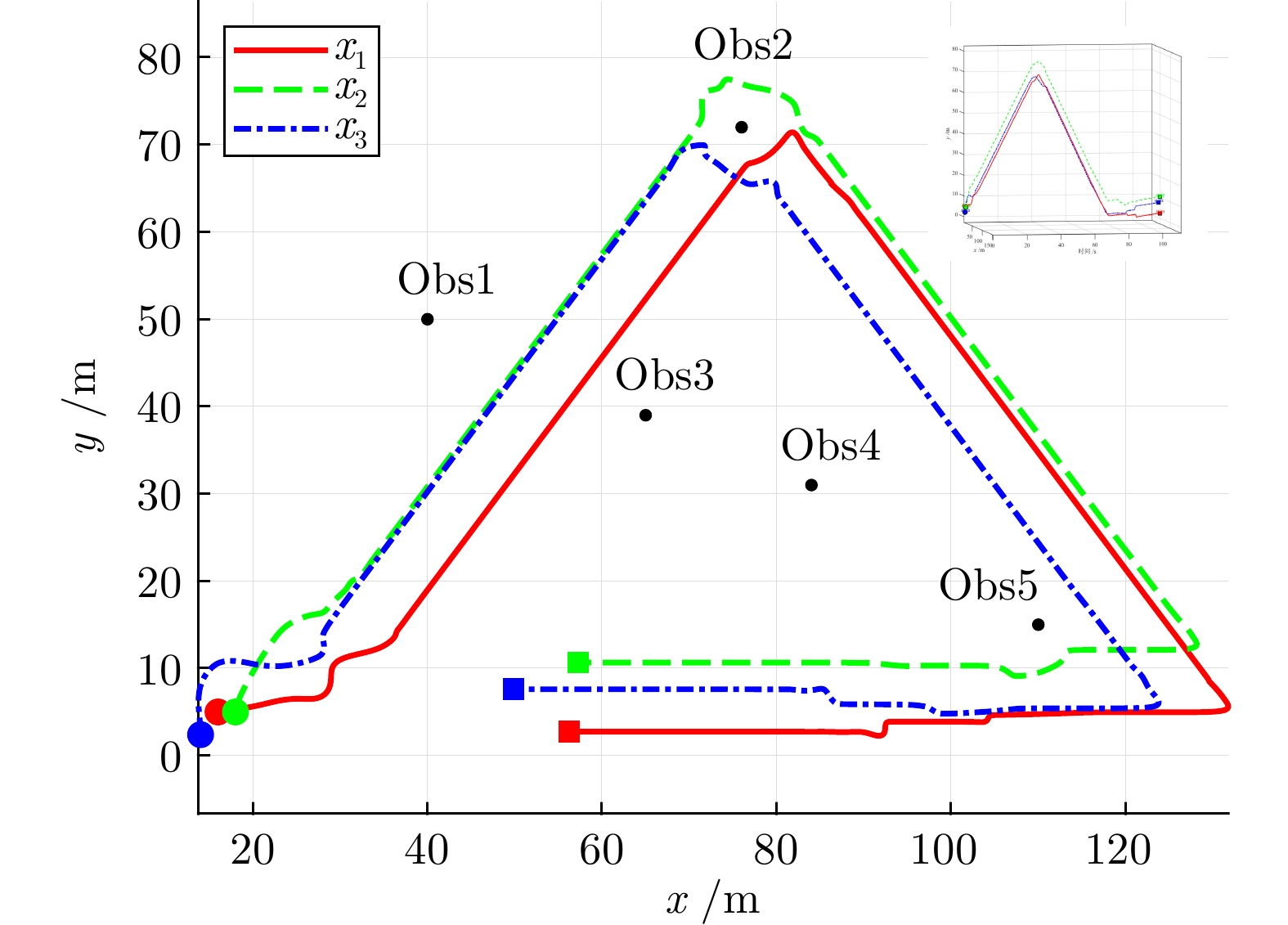
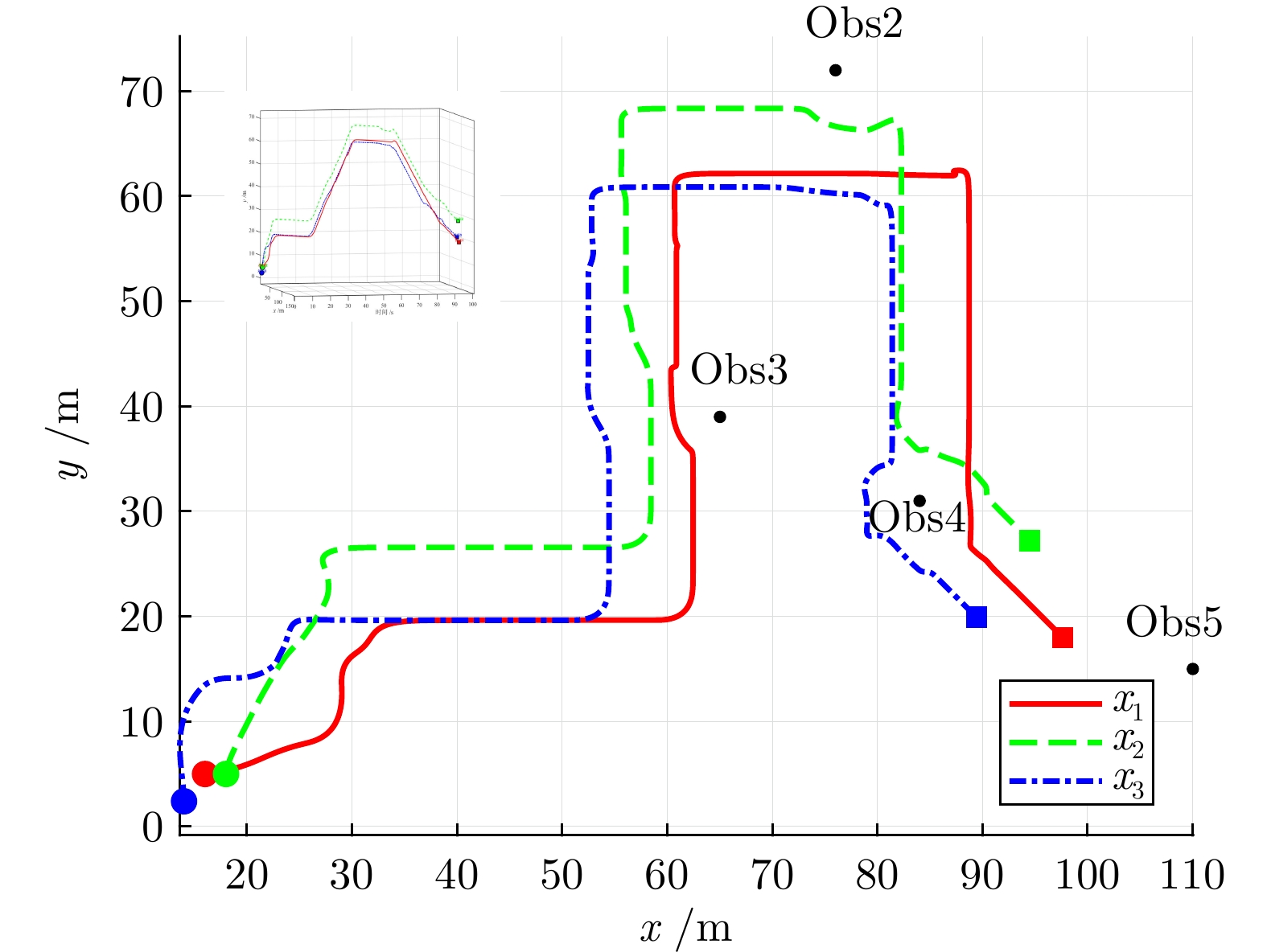
图 12 五边形轨迹的智能体间距离和速度变化轨迹
Fig. 12 Inter-agent distances and velocity variation trajectories of pentagonal trajectory
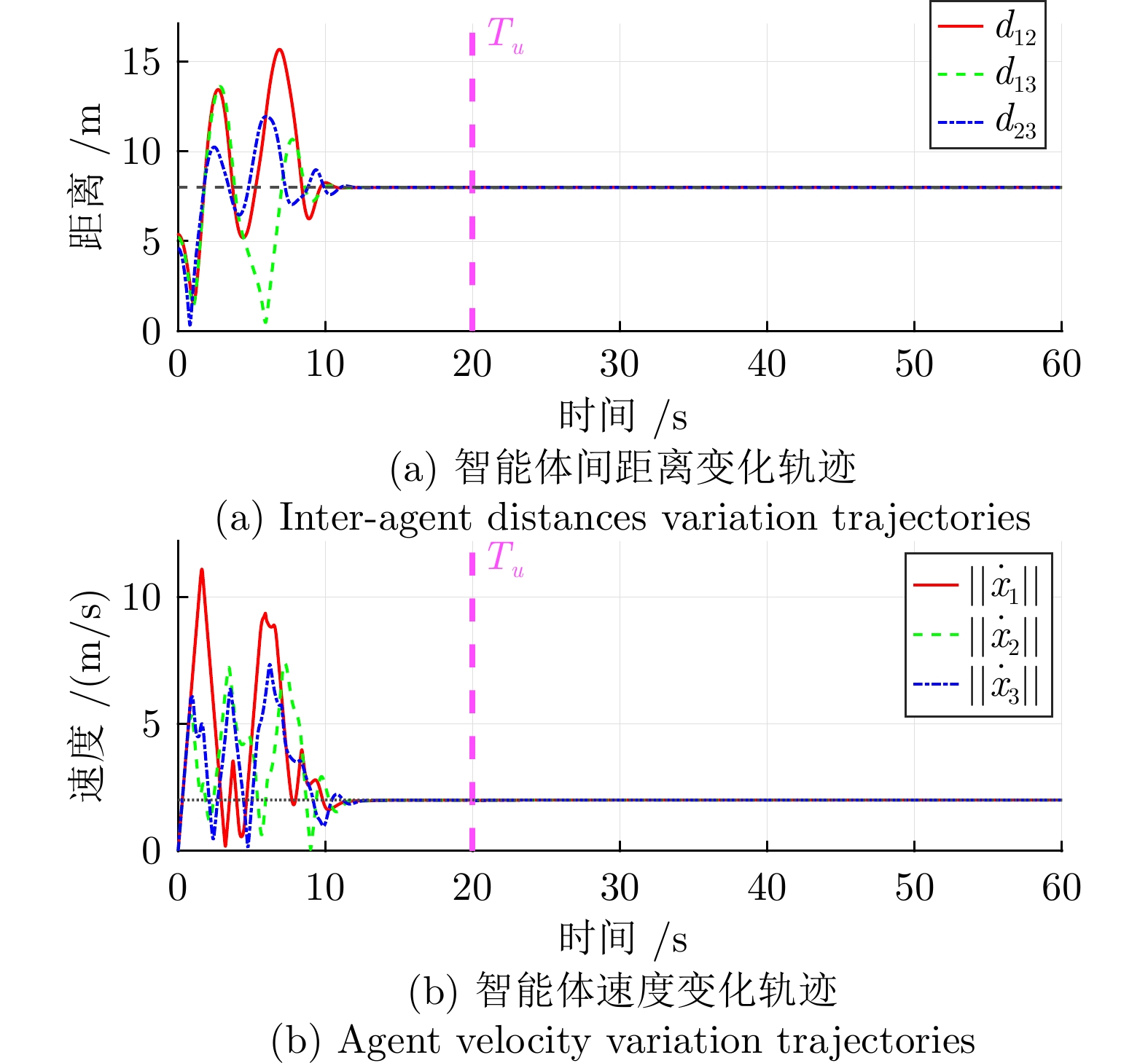
图 13 智能体间距离和速度变化轨迹 (参数误差下)
Fig. 13 Inter-agent distances and velocity variation trajectories (under parameter perturbations)
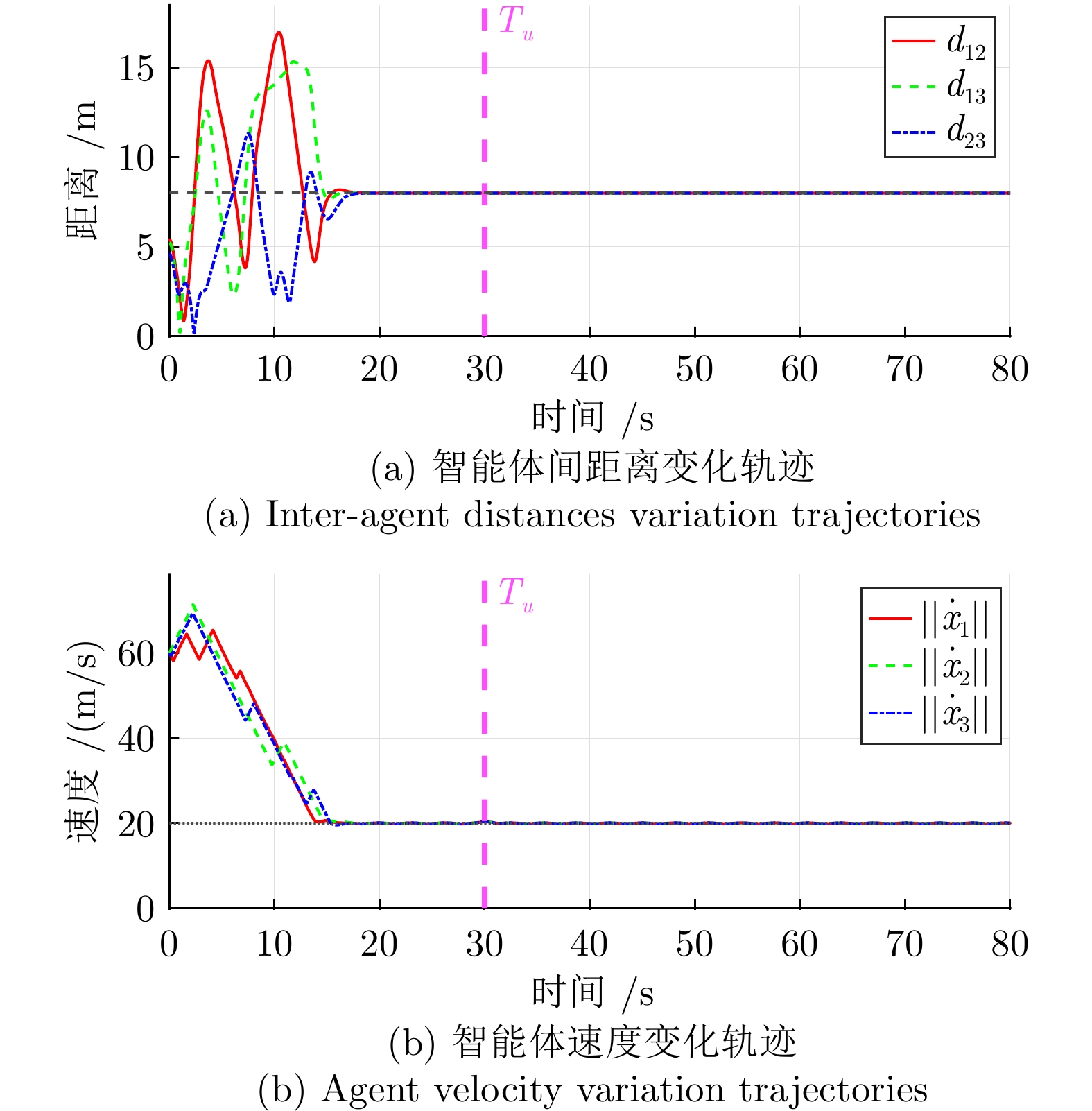
图 14 智能体间距离和速度变化轨迹 (外部干扰下)
Fig. 14 Inter-agent distances and velocity variation trajectories (under external disturbances)
-
[1] 吕金虎, 于江龙, 董希旺. 飞行器集群协同制导新进展. 自动化学报, 2025, 51(4): 727−743 doi: 10.16383/j.aas.c240499Lü Jin-Hu, Yu Jiang-Long, Dong Xi-Wang. New progress in cooperative guidance for aircraft swarm system. Acta Automatica Sinica, 2025, 51(4): 727−743 doi: 10.16383/j.aas.c240499 [2] Lei C J, Wu S H, Yang Y, Xue J Y, Zhang Q Y. Joint trajectory and communication optimization for heterogeneous vehicles in maritime SAR: Multi-agent reinforcement learning. IEEE Transactions on Vehicular Technology, 2024, 73(9): 12328−12344 doi: 10.1109/TVT.2024.3388499 [3] Wang Y, Wang J J, Zhu R J, Wang Z Y, Xin P J, Pan P. Distributed knowledge-enhanced multi-agent reinforcement learning for internet of drones. IEEE Internet of Things Journal, 2025, 12(21): 44166−44176 doi: 10.1109/jiot.2025.3582058 [4] 郜晨, 何潇, 周东华. 基于PI结构的多智能体系统容错一致性控制. 自动化学报, 2025, 51(3): 570−576Gao Chen, He Xiao, Zhou Dong-Hua. Fault-tolerant consensus control of multi-agent systems based on PI structure. Acta Automatica Sinica, 2025, 51(3): 570−576 [5] Mu C X, Peng J W. Learning-based cooperative multiagent formation control with collision avoidance. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, 52(12): 7341−7352 doi: 10.1109/TSMC.2022.3153030 [6] Fang H, Wei Y, Chen J, Xin B. Flocking of second-order multiagent systems with connectivity preservation based on algebraic connectivity estimation. IEEE Transactions on Cybernetics, 2016, 47(4): 1067−1077 [7] Ding C, Ma L, Ding S H. A new adaptive second-order sliding mode controller design for nonlinear systems with multiple uncertainties. International Journal of Robust and Nonlinear Control, 2023, 33(3): 1438−1455 doi: 10.1002/rnc.6508 [8] Zou A M. Finite-time output feedback attitude tracking control for rigid spacecraft. IEEE Transactions on Control Systems Technology, 2013, 22(1): 338−345 doi: 10.1109/tcst.2013.2246836 [9] Tang R Q, Yang X S, Wen G H, Lu J Q. Finite-time synchronization of fractional-order memristive fuzzy neural networks: Event-based control with linear measurement error. IEEE Transactions on Neural Networks and Learning Systems, 2024, 36(5): 8205−8214 [10] 李小华, 胡利耀. 一类p规范型非线性系统预设性能有限时间H∞跟踪控制. 自动化学报, 2021, 47(12): 2870−2880Li Xiao-Hua, Hu Li-Yao. Prescribed performance finite-time H∞ tracking control for a class of p-normal form nonlinear systems. Acta Automatica Sinica, 2021, 47(12): 2870−2880 [11] Li Z Q, Wang Y J, Song Y D, Ao W. Global consensus tracking control for high-order nonlinear multiagent systems with prescribed performance. IEEE Transactions on Cybernetics, 2022, 53(10): 6529−6537 doi: 10.1109/access.2024.3408880 [12] Ni J K, Liu L, Tang Y, Liu C X. Predefined-time consensus tracking of second-order multiagent systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 51(4): 2550−2560 [13] Ning B D, Han Q L, Zuo Z Y, Ding L, Lu Q, Ge X H. Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies. IEEE Transactions on Industrial Informatics, 2022, 19(2): 1121−1135 doi: 10.1109/tii.2022.3201589 [14] Liu Y, Li Y M. Prescribed-time formation control for unmanned surface vehicle systems under switching topology. IEEE Transactions on Intelligent Vehicles, 2024, 9(9): 5750−5760 doi: 10.1109/TIV.2024.3359694 [15] Zeng D H, Zeng B W, Liu Y C, Zhao J, Cai C T. Practical prescribed-time trajectory tracking control for marine surface vehicles. IEEE Transactions on Circuits and Systems II: Express Briefs, 2024, 71(12): 4899−4903 [16] Yang Y, Yang T Q, Zhou S C, Sun W, Wu D F. Prescribed-time extended state observer-based bipartite formation control of vehicle multi-agent systems. IEEE Transactions on Automation Science and Engineering, 2025, 22: 2174−2185 doi: 10.1109/TASE.2024.3376081 [17] Wang Y J, Song Y D. Leader-following control of high-order multi-agent systems under directed graphs: Pre-specified finite time approach. Automatica, 2017, 87: 113−120 doi: 10.1016/j.automatica.2017.09.017 [18] Sabattini L, Chopra N, Secchi C. Decentralized connectivity maintenance for cooperative control of mobile robotic systems. The International Journal of Robotics Research, 2013, 32(12): 1411−1423 doi: 10.1177/0278364913499085 [19] Yang L, Constantinescu D, Wu L G. Passivity-based connectivity maintenance of teleoperated multi-robots under DoS attacks. IEEE Transactions on Automation Science and Engineering, 2025, 22: 10484−10493 doi: 10.1109/TASE.2024.3524358 [20] Zhu Y Z, Zheng W X. Multiple Lyapunov functions analysis approach for discrete-time-switched piecewise-affine systems under dwell-time constraints. IEEE Transactions on Automatic Control, 2019, 65(5): 2177−2184 doi: 10.1109/tac.2019.2938302 [21] Long L J, Wang F L, Chen Z Y. Global event-triggered funnel control of switched nonlinear systems via switching multiple Lyapunov functions. IEEE Transactions on Cybernetics, 2024, 54(11): 6731−6741 doi: 10.1109/TCYB.2024.3399392 [22] 杨可馨, 李永强, 侯忠生, 冯宇. 基于多李雅普诺夫函数的一般非线性系统渐近镇定. 自动化学报, 2025, 51(1): 197−209 doi: 10.16383/j.aas.c240309Yang Ke-Xin, Li Yong-Qiang, Hou Zhong-Sheng, Feng Yu. Asymptotically stabilization for general nonlinear systems based on multiple Lyapunov functions. Acta Automatica Sinica, 2025, 51(1): 197−209 doi: 10.16383/j.aas.c240309 [23] Liang Y, Zhang L X, Wang X R. Antibump switched LPV control with delayed scheduling for morphing aircraft. IEEE Transactions on Aerospace and Electronic Systems, 2024, 60(4): 5010−5023 doi: 10.1109/TAES.2024.3384177 [24] 吴锦娃, 刘勇华, 苏春翌, 鲁仁全. 具有不确定控制增益严格反馈系统的自适应命令滤波控制. 自动化学报, 2024, 50(5): 1015−1023 doi: 10.16383/j.aas.c210553Wu Jin-Wa, Liu Yong-Hua, Su Chun-Yi, Lu Ren-Quan. Adaptive command filtered control of strict feedback systems with uncertain control gains. Acta Automatica Sinica, 2024, 50(5): 1015−1023 doi: 10.16383/j.aas.c210553 [25] Yang Y, Constantinescu D, Shi Y. Passive multiuser teleoperation of a multirobot system with connectivity-preserving containment. IEEE Transactions on Robotics, 2021, 38(1): 209−228 doi: 10.1109/tro.2021.3086685 -

 下载:
下载:

计量
- 文章访问数: 203
- HTML全文浏览量: 134
- 被引次数: 0
