

-
摘要: 针对存在外部扰动的非线性不确定时滞分布参数多智能体系统一致性问题, 提出一种$H_{\infty}$模糊边界一致性控制方案. 首先, 通过T-S模糊偏微分方程对复杂分布参数多智能体系统进行精确描述. 之后, 基于该T-S模糊偏微分方程模型, 设计基于边界测量的$H_{\infty}$模糊边界一致性控制策略. 该策略仅需在空间域边界部署少量执行器和传感器, 可有效降低控制成本. 进一步, 通过运用不等式技术与Lyapunov直接法, 得到基于线性矩阵不等式的一致性充分条件, 以保证一致误差系统指数稳定且满足$H_{\infty}$性能. 最后, 通过仿真实验验证了该方法的有效性.
-
关键词:
- 分布参数多智能体系统 /
- 边界控制 /
- H∞控制 /
- 模糊控制
Abstract: For the consensus control problem of nonlinear uncertain delayed distributed parameter multi-agent systems with external disturbances, an $H_{\infty}$ fuzzy boundary consensus control scheme is proposed. First, the complex distributed parameter multi-agent system is accurately described by T-S fuzzy partial differential equations. Then, based on this T-S fuzzy partial differential equation model, an $H_{\infty}$ fuzzy boundary consensus control strategy under boundary measurements is designed. This strategy only requires deploying a small number of actuators and sensors at the boundary of the spatial domain, which can effectively reduce the control cost. Further, by using inequality techniques and the Lyapunov direct method, sufficient conditions for consensus based on linear matrix inequalities are derived to ensure that the consensus error system is exponentially stable and satisfies the $H_{\infty}$ performance. Finally, the effectiveness of the proposed method is verified through simulation experiments.-
Key words:
- Distributed parameter multiagent systems /
- boundary control /
- H∞ control /
- fuzzy control
-
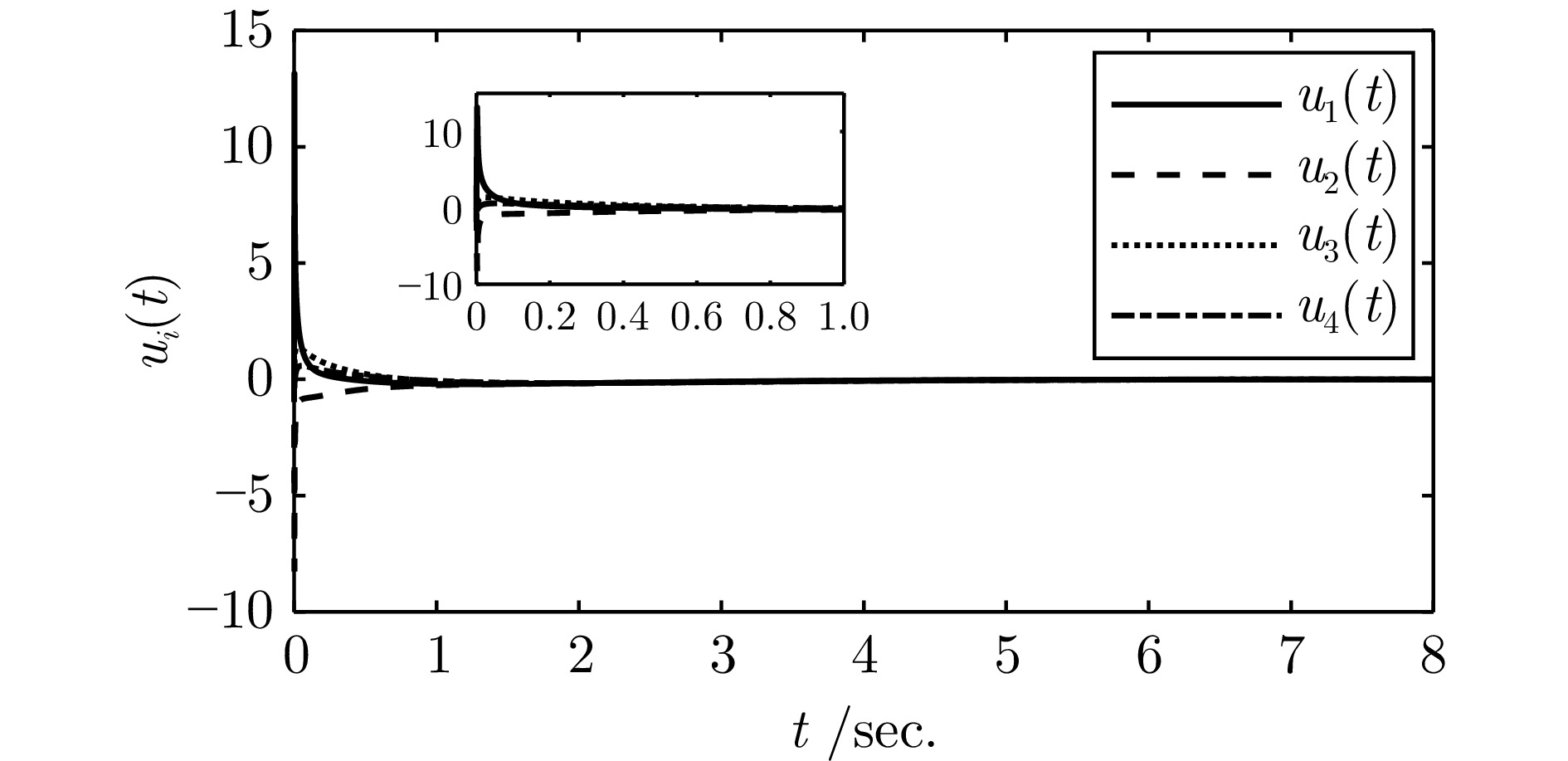
图 2 控制输入$u_{i}(t)$, $i=1,\; 2,\; 3,\; 4$
Fig. 2 Control input $u_{i}(t)$, $i=1,\; 2,\; 3,\; 4$
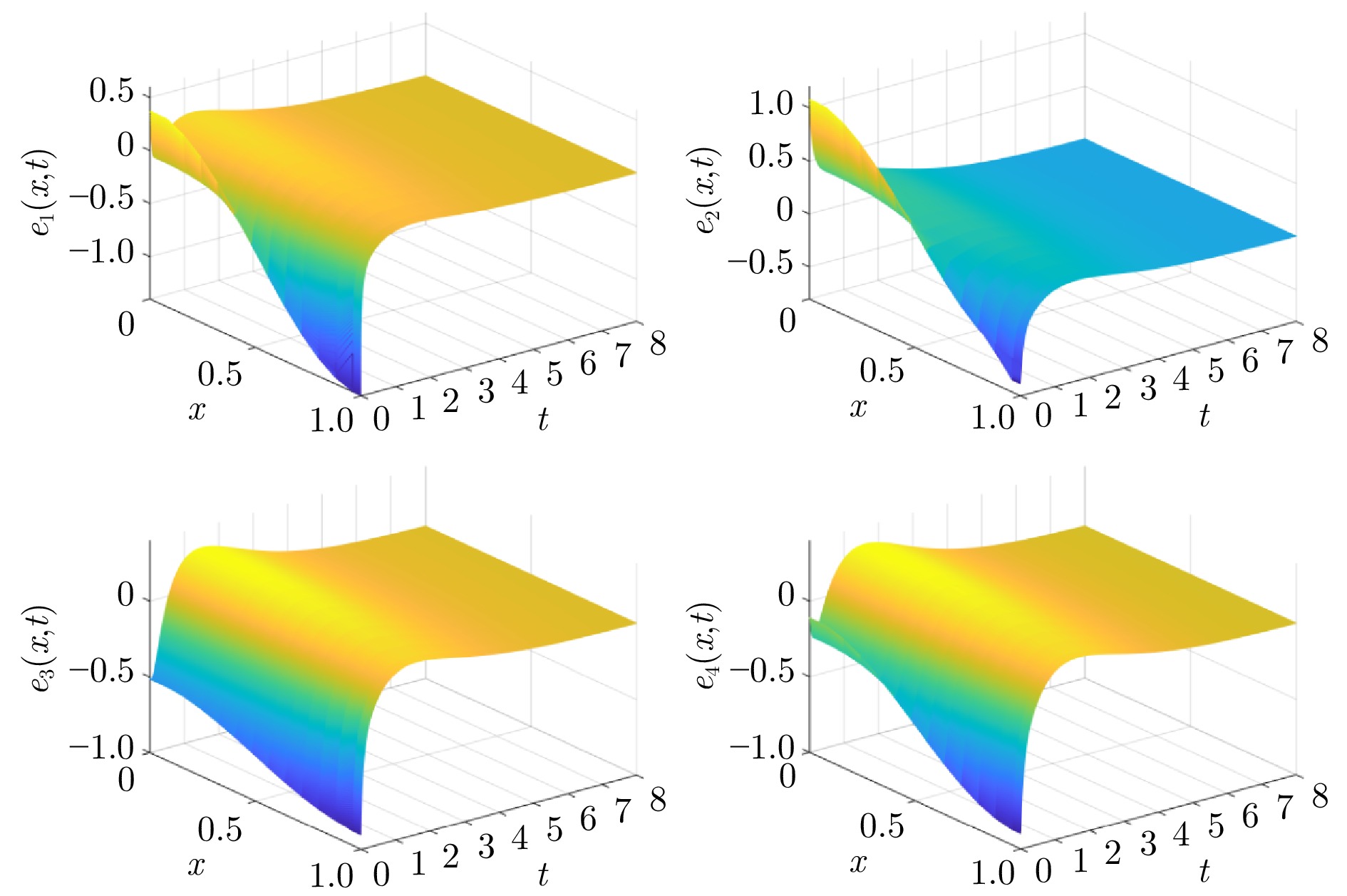
图 3 误差系统状态$e_i(x,\; t)$, $i=1,\;2,\;3,\;4$的闭环演化轮廓
Fig. 3 Closed-loop evolution profiles of the states of the error systems $e_i(x,\; t)$, $i=1,\;2,\;3,\;4$
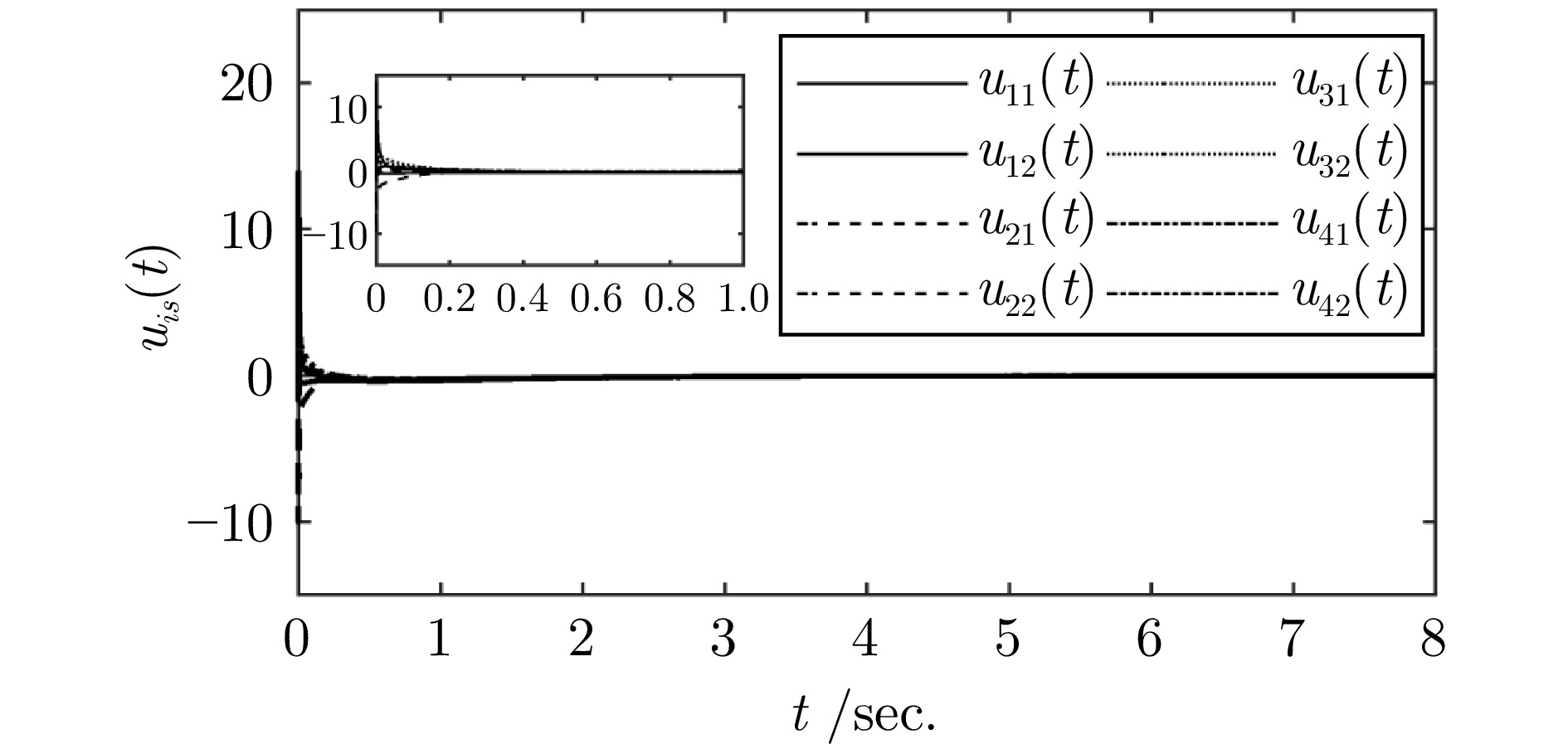
图 4 控制输入$u_{is}(t)$, $i=1,\;2,\;3,\;4$, $s=1,\;2$
Fig. 4 Control input $u_{is}(t)$, $i=1,\;2,\;3,\;4$, $s=1,\;2$
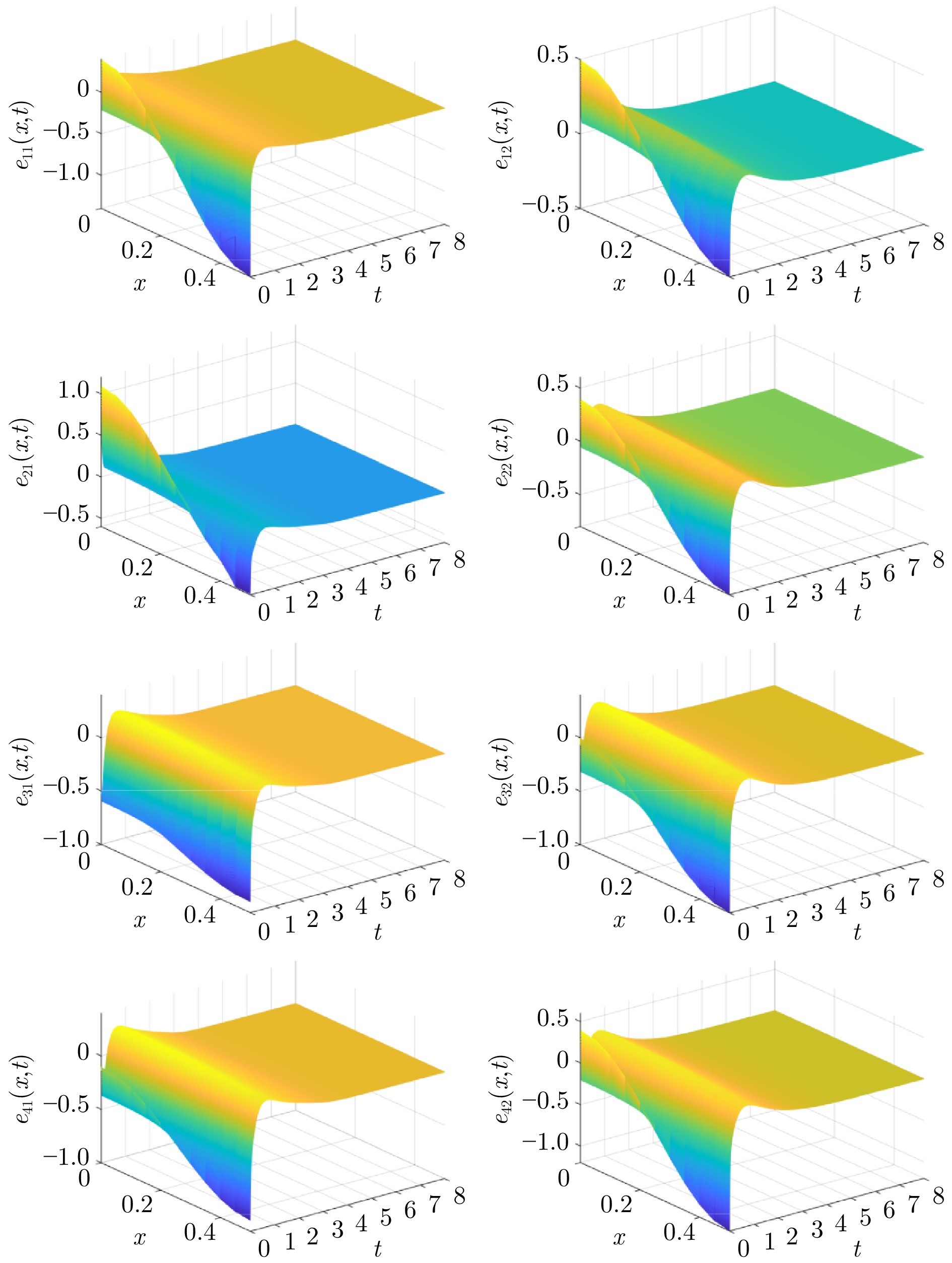
图 5 误差系统状态$e_{is}(x,\; t)$, $i=1,\;2,\;3,\;4$, $s=1,\;2$的闭环演化轮廓
Fig. 5 Closed-loop evolution profiles of the states of the error systems $e_{is}(x,\; t)$, $i=1,\;2,\;3,\;4$, $s=1,\;2$
表 1 系统参数及取值
Table 1 System parameters and values
参数 取值 $ \mu $ $ 1 $ $ r_0 $ $ 0.1 $ $ \xi $ $ 2 $ $ d_i(x,\; t) $ $ 5{\rm e}^{-t}{\rm cos}(2x) $ $ \phi_0(x,\; m) $ $ 0.5 $ $ \phi_1(x,\; m) $ $ 0.9{\rm cos}(\pi x/ l_2) $ $ \phi_2(x,\; m) $ $ 0.8{\rm cos}(\pi x/ l_2)+0.8 $ $ \phi_3(x,\; m) $ $ 0.2{\rm cos}(\pi x/ l_2)-0.2 $ $ \phi_4(x,\; m) $ $ 0.4{\rm cos}(\pi x/ l_2) $  下载: 导出CSV
下载: 导出CSV
表 2 系统参数及取值
Table 2 System parameters and values
参数 取值 $ \omega $ $ 1 $ $ \eta $ $ 0.45 $ $ o $ $ 0.1 $ $ d_{i1}(x,\; t) $ $ 5{\rm e}^{-2t}{\rm cos}(2x) $ $ d_{i2}(x,\; t) $ $ 5{\rm e}^{-2t}{\rm cos}(2x) $ $ \phi_{01}(x,\; m) $ $ 0.5 $ $ \phi_{02}(x,\; m) $ $ 0.4 $ $ \phi_{11}(x,\; m) $ $ 0.9{\rm cos}(\pi x/ l_2) $ $ \phi_{12}(x,\; m) $ $ 0.5{\rm cos}(\pi x/ l_2)+0.4 $ $ \phi_{21}(x,\; m) $ $ 0.8{\rm cos}(\pi x/ l_2)+0.8 $ $ \phi_{22}(x,\; m) $ $ 0.6{\rm cos}(\pi x/ l_2)+0.2 $ $ \phi_{31}(x,\; m) $ $ 0.2{\rm cos}(\pi x/ l_2)-0.2 $ $ \phi_{32}(x,\; m) $ $ 0.5{\rm cos}(\pi x/ l_2)-0.1 $ $ \phi_{41}(x,\; m) $ $ 0.4{\rm cos}(\pi x/ l_2) $ $ \phi_{42}(x,\; m) $ $ 0.8{\rm cos}(\pi x/ l_2) $
下载: 导出CSV
-
[1] 罗彪, 胡天萌, 周育豪, 黄廷文, 阳春华, 桂卫华. 多智能体强化学习控制与决策研究综述. 自动化学报, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392Luo Biao, Hu Tian-Meng, Zhou Yu-Hao, Huang Ting-Wen, Yang Chun-Hua, Gui Wei-Hua. Survey on multi-agent reinforcement learning for control and decision-making. Acta Automatica Sinica, 2025, 51(3): 510−539 doi: 10.16383/j.aas.c240392 [2] Lin Z, Wang L, Han Z, Fu M. Distributed formation control of multi-agent systems using complex laplacian. IEEE Transactions on Automatic Control, 2014, 59(7): 1765−1777 doi: 10.1109/TAC.2014.2309031 [3] Li S, Zhang J, Li X, Wang F, Luo X, Guan X. Formation control of heterogeneous discrete-time nonlinear multi-agent systems with uncertainties. IEEE Transactions on Industrial Electronics, 2017, 64(6): 4730−4740 doi: 10.1109/TIE.2017.2674590 [4] Wu T, Zhou P, Liu K, Yuan Y, Wang X, Huang H, Wu D O. Multi-agent deep reinforcement learning for urban traffic light control in vehicular networks. IEEE Transactions on Vehicular Technology, 2020, 69(8): 8243−8256 doi: 10.1109/TVT.2020.2997896 [5] 王彪新, 伍益明, 郑宁, 徐明. 虚假数据注入攻击下多机器人系统协同寻源. 自动化学报, 2024, 50(2): 403−416Wang Biao-Xin, Wu Yi-Ming, Zheng Ning, Xu Ming. Multi-robot system cooperative source seeking under false data injection attack. Acta Automatica Sinica, 2024, 50(2): 403−416 [6] Chen J, Li J, Yuan X. Global fuzzy adaptive consensus control of unknown nonlinear multiagent systems. IEEE Transactions on Fuzzy Systems, 2020, 28(3): 510−522 doi: 10.1109/TFUZZ.2019.2908771 [7] Rezaee H, Abdollahi F. Adaptive leaderless consensus control of strict-feedback nonlinear multiagent systems with unknown control directions. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(10): 6435−6444 doi: 10.1109/TSMC.2019.2962973 [8] Yang Y, Li Y, Yue D, Tian Y-C, Ding X. Distributed secure consensus control with event-triggering for multiagent systems under doS attacks. IEEE Transactions on Cybernetics, 2021, 51(6): 2916−2928 doi: 10.1109/TCYB.2020.2979342 [9] Gao C, Wang Z, He X, Dong H. Fault-tolerant consensus control for multiagent systems: An encryption-decryption scheme. IEEE Transactions on Automatic Control, 2022, 67(5): 2560−2567 doi: 10.1109/TAC.2021.3079407 [10] Zhou Y, Luo B, Wang X, Xu X, Xiao L. RL-based adaptive optimal bipartite consensus control for nonlinear heterogeneous MASs via event-triggered state feedback. IEEE Transactions on Circuits and Systems I: Regular Papers, 2024, 71(9): 4261−4273 doi: 10.1109/TCSI.2024.3426982 [11] Fu Q, Du L, Xu G, Wu J. Consensus control for multi-agent systems with distributed parameter models via iterative learning algorithm. Journal of the Franklin Institute, 2018, 355(10): 4453−4472 doi: 10.1016/j.jfranklin.2018.04.033 [12] Fu Q, Du L, Xu G, Wu J, Yu P. Consensus control for multi-agent systems with distributed parameter models. Neurocomputing, 2018, 308: 58−64 doi: 10.1016/j.neucom.2018.04.051 [13] Qiu Q and Su H. Distributed adaptive consensus of parabolic PDE agents on switching graphs with relative output information. IEEE Transactions on Industrial Informatics, 2022, 18(1): 297−304 doi: 10.1109/TII.2021.3070432 [14] Li L, Liu J. Consensus tracking control and vibration suppression for nonlinear mobile flexible manipulator multi-agent systems based on PDE model. Nonlinear Dynamics, 2023, 111(4): 3345−3359 doi: 10.1007/s11071-022-07980-9 [15] Tang L, Liu F. Adaptive output feedback containment control for parabolic PDE multi-agent systems. Systems & Control Letters, 2025, 196: Article No. 105994 doi: 10.1016/j.sysconle.2024.105994 [16] Shang X, Tang L, Liu Y J and Zhang S. Adaptive control for parabolic PDE based multi-agent systems. International Journal of Control, 2025, 98(4): 815−823 doi: 10.1080/00207179.2024.2367598 [17] Miao L, Sun X L, Song X N, Song S. Consensus for PDE-based multiagent systems under dual event-triggered mechanisms. Journal of the Franklin Institute, 2025, 362: Article No. 107493 doi: 10.1016/j.jfranklin.2024.107493 [18] Yang C, Huang T, Zhang A, Qiu J, Cao J, Alsaadi F E. Output consensus of multiagent systems based on PDEs with input constraint: a boundary control approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 51(1): 370−377 [19] Zhao L, Wu H, Cao J. Event-triggered boundary consensus control for multi-agent systems of fractional reaction-diffusion PDEs. Communications in Nonlinear Science and Numerical Simulation, 2023, 127: Article No. 107538 doi: 10.1016/j.cnsns.2023.107538 [20] Liu Z, Cui X, Zhao Z, Hong K S. PDE based consensus control for multi-agent systems with event-triggered mechanism. IEEE Transactions on Control of Network Systems, 2024, 11(4): 1768−1777 doi: 10.1109/TCNS.2024.3355047 [21] Zhang X, Luo B, Wang Z P, Xu X, Yang C. Consensus of nonlinear uncertain delayed multiagent systems modeled by PDEs via adaptive boundary control. IEEE Transactions on Cybernetics, 2025, 55(6): 2980−2992 doi: 10.1109/TCYB.2025.3554844 [22] Zhou B, Lin Z. Consensus of high-order multi-agent systems with large input and communication delays. Automatica, 2014, 50(2): 452−464 doi: 10.1016/j.automatica.2013.12.006 [23] Wu X, Tang Y, Zhang W. Stability analysis of stochastic delayed systems with an application to multi-agent systems. IEEE Transactions on Automatic Control, 2016, 61(12): 4143−4149 doi: 10.1109/TAC.2016.2548559 [24] Wu X, Tang Y, Cao J, Zhang W. Distributed consensus of stochastic delayed multi-agent systems under asynchronous switching. IEEE Transactions on Cybernetics, 2016, 46(8): 1817−1827 doi: 10.1109/TCYB.2015.2453346 [25] 路晓庆, 王耀南, 毛建旭. 噪声环境下时滞多智能体系统的非线性编队控制. 自动化学报, 2014, 40(12): 2959−2967 doi: 10.1016/S1874-1029(15)60001-5Lu Xiao-Qing, Wang Yao-Nan, Mao Jian-Xu. Nonlinear control for multi-agent formations with delays in noisy environments. Acta Automatica Sinica, 2014, 40(12): 2959−2967 doi: 10.1016/S1874-1029(15)60001-5 [26] Dai X, Wang C, Tian S, Huang Q. Consensus control via iterative learning for distributed parameter models multi-agent systems with time-delay. Journal of the Franklin Institute, 2019, 356(10): 5240−5259 doi: 10.1016/j.jfranklin.2019.05.015 [27] Jiang B, Karimi H R, Kao Y, Gao C. Takagi-sugeno model-based sliding mode observer design for finite-time synthesis of semi-markovian jump systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(7): 1505−1515 doi: 10.1109/TSMC.2018.2846656 [28] Jiang B, Karimi H R, Kao Y, Gao C. Takagi-sugeno model based event-triggered fuzzy sliding-mode control of networked control systems with semi-markovian switchings. IEEE Transactions on Fuzzy Systems, 2020, 28(4): 673−683 doi: 10.1109/TFUZZ.2019.2914005 [29] Sakthivel R, Ahn C K, Joby M. Fault-tolerant resilient control for fuzzy fractional order systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(9): 1797−1805 doi: 10.1109/TSMC.2018.2835442 [30] Zhao J, Xu S, Park J H. Improved criteria for the stabilization of T-S fuzzy systems with actuator failures via a sampled-data fuzzy controller. Fuzzy Sets and Systems, 2020, 392: 154−169 doi: 10.1016/j.fss.2019.09.004 [31] Han J, Zhang H, Liu X, Wei X. Dissipativity-based fault detection for uncertain switched fuzzy systems with unmeasurable premise variables. IEEE Transactions on Fuzzy Systems, 2019, 27(12): 2421−2432 doi: 10.1109/TFUZZ.2019.2900600 [32] Han X, Ma Y, Fu L. Finite-time dynamic output-feedback dissipative control for singular uncertainty T-S fuzzy systems with actuator saturation and output constraints. Journal of the Franklin Institute, 2020, 357(8): 4543−4573 doi: 10.1016/j.jfranklin.2020.01.048 [33] Zhang C, Lam H K, Qiu J, Liu C, Chen Q. A new design of membership-function-dependent controller for T-S fuzzy systems under imperfect premise matching. IEEE Transactions on Fuzzy Systems, 2019, 27(7): 1428−1440 doi: 10.1109/TFUZZ.2018.2880424 [34] Moon J H, Lee H J. Graph laplacian-based leaderless consensus for multi-agent systems in T-S form. Fuzzy Sets and Systems, 2019, 368: 119−136 doi: 10.1016/j.fss.2018.10.007 [35] Jang Y H, Lee S, Kim H S. Robust sampled-data fuzzy consensus control for nonlinear multi-agent systems with parametric uncertainties. Information Sciences, 2025Article No. 122519 [36] Hou Q, Dong J. Membership function-dependent $H_{\infty}$ control for set-described T-S fuzzy system via improved dynamic memory event-triggered mechanism. IEEE Transactions on Fuzzy Systems, 2024, 32(12): 7157−7167 doi: 10.1109/TFUZZ.2024.3485175 [37] Tanaka K, Wang H O. Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach. New York: Wiley, 2001. [38] Wang Z P, Zhang X, Wu H N, Chadli M, Huang T, Qiao J. Dynamic fuzzy boundary output feedback control for nonlinear delayed parabolic partial differential equation systems under noncollocated boundary measurement. IEEE Transactions on Fuzzy Systems, 2023, 31(6): 2006−2017 doi: 10.1109/TFUZZ.2022.3217370 [39] Zhang X, Wang Z P, Wu H N, Zhang X W, Li H X, Qiao J. Robust non-fragile $H_{\infty}$ fuzzy control for uncertain nonlinear delayed hyperbolic PDE systems. International Journal of Fuzzy Systems, 2023, 25(2): 851−867 doi: 10.1007/s40815-022-01409-6 -

 下载:
下载:

计量
- 文章访问数: 134
- HTML全文浏览量: 99
- 被引次数: 0
